


Hoe een robottransporteur te programmeren zonder gek te worden?
Het programmeren van een robottransporteur is lastiger dan veel mensen zich voorstellen. Goede simulatie is de sleutel tot succes, maar hoe doe je dat zonder gek te worden?
Transportbanden zijn een gemakkelijke manier om producten naar uw robot te verplaatsen, toch?
Nou niet echt. We beschouwen transportbanden vaak als een eenvoudige oplossing, maar in feite zijn ze een van de meer gecompliceerde methoden voor het afleveren van werkstukken. Ze vereisen dat de robot objecten op de transportband detecteert en volgt. Ze moeten worden aangestuurd via het robotprogramma. Ze hebben tijdens hun levensduur ook last van verschillende mechanische problemen, zoals slecht volgen, riemslijtage en slippen. Dit alles betekent dat transportbanden je een beetje gek kunnen maken.
In plaats van eenvoudig te zijn, kunnen ze lastig te gebruiken zijn.
We kunnen de mechanische problemen van uw transportbanden niet oplossen - daarvoor heeft u een goed onderhoudsschema nodig zoals weergegeven in deze handige checklist van Cisco-Eagle. We kunnen echter helpen u de transportband eenvoudig te simuleren, zodat u deze kunt testen en integreren met uw robotprogrammering.
Hier leest u hoe u uw robottransportband kunt programmeren zonder gek te worden.
De 5 lastig bewegende delen van een robottransporteur
Ten eerste is het belangrijk om te begrijpen waarom het programmeren van een transportband een uitdaging is.
Er zijn 5 "bewegende delen" die het moeilijk maken om robotprogrammering met transportbanden te integreren.
1. Controle van de transportband zelf
Het lijkt misschien alsof de besturing van de transportband slechts een "aan/uit" -deal is, maar het is meestal een beetje ingewikkelder dan dat. Transportbanden hebben verschillende bedieningsopties, afhankelijk van het model. Sommige hebben een vaste snelheid, terwijl andere kunnen worden geregeld met variabele snelheden. Sommige hebben een omgekeerde modus, actief remmen of snel schakelen. Dan zijn er verschillende besturingsmethoden, de drie meest voorkomende zijn pulsbesturing, snelheidsregeling en gedistribueerde besturing.

Mogelijk moet u de transportband binnen het robotprogramma zelf bedienen. Als dat niet het geval is, moet u mogelijk via een netwerk met de transportband communiceren. Beide opties maken het programmeren ingewikkelder.
2. Traceren en detecteren van objecten
Om objecten van een bewegende transportband op te pakken, moet de robot ze betrouwbaar kunnen lokaliseren. Dit betekent dat je een soort sensor nodig hebt om te detecteren wanneer een object voor de robot arriveert. Bovendien heeft de robot misschien een manier nodig om de objecten te volgen terwijl de transportband beweegt.
De meest gebruikte sensoren hiervoor zijn vision-sensoren (bijvoorbeeld 2D- of 3D-camera's) en onderdeeldetectiesensoren (bijvoorbeeld lichtstralen, magnetische sensoren, inductieve sensoren, enz.). Sommige zijn eenvoudiger te integreren dan andere, maar ze voegen allemaal extra complexiteit toe aan uw programma.
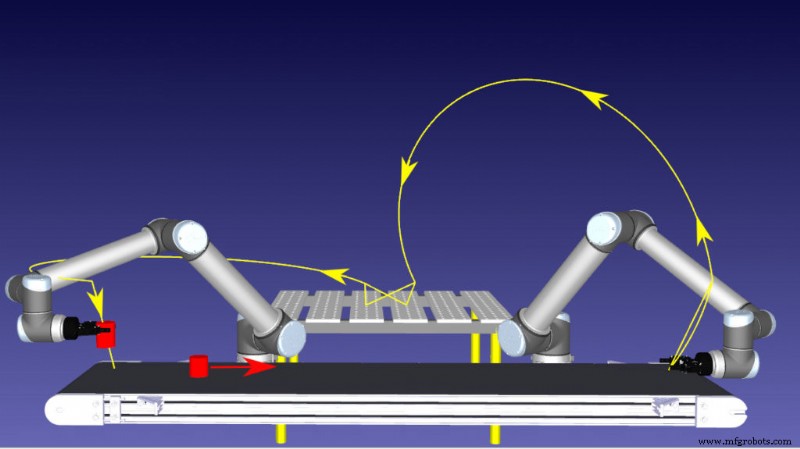
3. Omgaan met bewegende objecten
Een bewegend doel is altijd moeilijker te hanteren dan een statisch doel. Dit introduceert complexiteit bij het grijpen vanaf een transportband. De robot moet in staat zijn om in positie te komen, het object stevig vast te pakken en weg te gaan terwijl er nieuwe objecten blijven komen.
De snelheid van de transportband moet precies worden afgestemd op de snelheid van de robot, anders kunnen er objecten worden gemist. Als je de beroemde "chocoladescène" uit de komedie I Love Lucy uit de jaren 50 hebt gezien, weet je wat ik bedoel (en hier is het als je het nog niet hebt gezien).
4. Einde effector keuze
De robotarm is niet het enige onderdeel van het systeem dat op snelheid moet blijven. De eindeffector kan een significant effect hebben op de cyclustijd en daarmee op de snelheid van de transporteur. Sommige soorten eindeffector zijn sneller dan andere.
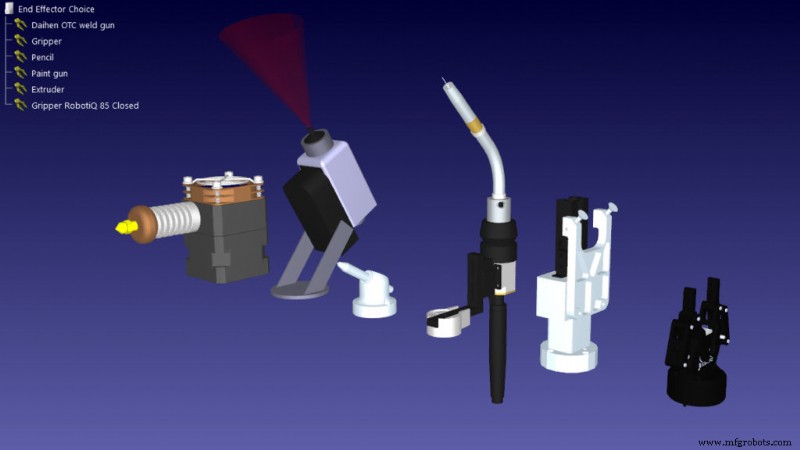
Dit betekent dat we nu 3 onafhankelijke snelheden tegelijk moeten regelen en coördineren:de transportbandsnelheid, de robotarmsnelheid en de eindeffector-grijpsnelheid.
5. Gebruik van armaturen
Het laatste bewegende deel is eigenlijk helemaal geen bewegend deel. Fixtures zijn statische mechanische onderdelen die aan de transportband worden bevestigd om de objecten op hun plaats te brengen. Ze zijn een betrouwbare manier om de objecten op de transportband te bestellen zonder gebruik te maken van sensoren.
U kunt bijvoorbeeld een armatuur gebruiken als alternatief voor het gebruik van een vision-sensor. Met speciaal gevormd plaatstaal kun je objecten in een statische wachtrij leiden, waardoor de robot ze zonder extra sensoren kan oppakken. Ze maken het programmeren eenvoudiger, maar verhogen de complexiteit van het mechanische ontwerp.
Een transportband simuleren met RoboDK
U kunt de vijf bovenstaande uitdagingen overwinnen door uw robotsysteem te simuleren en grondig te testen voordat u het fysieke systeem gebruikt. Dit is niet altijd gemakkelijk met robotsimulators, waarvan vele geen eenvoudige mogelijkheid hebben om transportbanden toe te voegen.
Gelukkig zijn transportbanden vrij eenvoudig in RoboDK. Er zijn zelfs twee opties om ze toe te voegen, afhankelijk van hoeveel controle je nodig hebt.
De twee soorten transportbanden in RoboDK zijn:
Optie 1:Python-programmering
De meest flexibele methode om een transportband in RoboDK te maken, is door deze in Python te programmeren. U kunt dit in actie zien in de voorbeeldvideo Transportbandsimulatie met RoboDK.
Voordelen van programmeren in Python zijn:
- Het is erg flexibel. De beweging van de transportband wordt alleen beperkt door uw programmeervaardigheid. U kunt de gesimuleerde transportband zo programmeren dat deze overeenkomt met de eigenschappen van uw echte band.
- Het is volledig aanpasbaar. U kunt de transportband programmeren om op elke gewenste manier te bewegen. Je hebt volledige controle over zijn bewegingen en hoe hij met objecten omgaat.
- Het maakt complexere transportbanden mogelijk. Als uw transportband geavanceerde besturingsmodi heeft, kunnen deze worden opgenomen in de python-code. Ook als je een armatuur hebt geplaatst om bijvoorbeeld objecten naar de zijkant van de band te verplaatsen, kan dit in de code worden geprogrammeerd.
Nadelen van programmeren in Python zijn:
- Het vereist programmeervaardigheid . Je moet kunnen programmeren in python. Dit is een van de gemakkelijkste talen om te leren, maar het vereist nog steeds een leercurve als je tot nu toe alleen de grafische interface van RoboDK hebt gebruikt.
- Het duurt wat langer . Vergeleken met de lineaire mechanismeoptie kost het programmeren in Python tijd. Bovendien, hoe complexer uw transportband, hoe langer het duurt om te programmeren.
Optie 2:Lineair mechanisme
De andere optie is om een lineair mechanisme te maken met behulp van de wizard "Modelmechanisme". Hiermee kunt u een eenvoudige transportband maken met een enkele lineaire as.
Voordelen van het lineaire mechanisme zijn:
- Het is snel. U kunt binnen enkele minuten een lineair mechanisme maken en de transportband zeer snel aan uw robotsimulatie toevoegen.
- Het gebruikt de grafische wizard. U kunt het mechanisme maken met behulp van de wizard met alleen referentiekaders en doelen.
- Het vereist weinig tot geen programmering. U hoeft geen Python-programmering te doen om de transportband te maken. Houd er echter rekening mee dat u waarschijnlijk wat moet programmeren om objecten op de transportband te detecteren.
Nadelen van het lineaire mechanisme zijn:
- Het is beperkt. Het eenvoudige karakter van het mechanisme betekent dat u slechts een transportband met één as kunt modelleren.
- Het is niet flexibel. Deze optie maakt het moeilijk om de meer geavanceerde besturingsopties van uw transportband te modelleren. Het maakt het ook moeilijk te detecteren wanneer voorwerpen van de transportband vallen.
Hoe te beginnen
Welke optie u kiest, hangt grotendeels af van veel dat u wilt vermijden python-programmering. Tenzij je een goede reden hebt om voor het lineaire mechanisme te kiezen, raden we meestal aan om de python-optie te kiezen. Het is veel flexibeler en - denk ik (hoewel ik een programmeur ben) - het is gemakkelijker te begrijpen en te implementeren.
Welke optie u ook kiest, u hoeft de transportbandsimulatie niet helemaal opnieuw te maken.
We hebben beide opties beschikbaar om te downloaden in onze Robotbibliotheek. Kies gewoon "Object" in het menu "Type" en u ziet de twee opties:"Model Python" voor de python-optie; en "Modelmechanisme" voor de optie lineair mechanisme.
Als je vastloopt, kun je altijd een reactie plaatsen op het RoboDK-forum en we zullen ons best doen om je te helpen.
Industriële robot
- Hoe spuitrobots de consistentie verbeteren
- Hoe verfrobots nabewerking verminderen
- Hoe bereikt een robot volledige autonomie?
- Gekke transportbanden
- Whitepaper:Hoe u uw robotpotentieel kunt vinden
- Ultieme gids:hoe u een juiste SCARA-robot kiest
- Robot Machine Tending:wat het is en hoe het werkt
- Raspberry Pi-robot:een Raspberry Pi-robot bouwen
- Hoe u de trainingstijd voor robotlassen kunt verkorten?
- De juiste manier om een robottransporteur te simuleren
- Hoe de transportbandstructuur te kiezen