


Hoe bereikt een robot volledige autonomie?
Wanneer de meeste mensen denken aan volledig autonome robots, maken ze zich zorgen over fantasievolle AI-scenario's die weinig basis hebben in de echte feiten - en mysteries - die we weten over bewustzijn. Terwijl ze zich daarop fixeren, wordt het moeilijker voor mensen om de praktische waarde in te zien van robots die onafhankelijk en zonder substantieel toezicht kunnen functioneren wanneer er een verscheidenheid aan banen, processen en industrieën zijn die veel meer hulp NODIG HEBBEN om zowel hun winstgevendheid als hun positieve impact te verbeteren.
Tegelijkertijd is robotautonomie het slachtoffer geworden van een aantal weggelopen definities – en verwachtingen – die niet noodzakelijkerwijs behulpzaam zijn om te begrijpen wat een robot nodig heeft om autonoom te worden en waar autonomie kan het snelst worden bereikt.
Om een robot volledige autonomie te laten bereiken, moet aan meerdere criteria worden voldaan:
- De robot moet zelf zinvolle informatie over zijn omgeving kunnen verzamelen
- De robot moet die informatie op een gestructureerde en bruikbare manier kunnen verwerken
- De robot moet zijn acties kunnen plannen als reactie op die informatie
- De robot moet het plan dat hij genereert tijdig kunnen uitvoeren
In al deze omstandigheden is het belangrijk om nog een paar dingen te begrijpen in termen van hoe deze parameters zijn gestructureerd:
- Een robot moet een doel hebben. Hoewel we menselijke autonomie traditioneel associëren met het vermogen om eigen doelen te stellen, is er geen verwachte parameter waarbinnen de robots van vandaag zelfbewust zullen worden.
- De autonomie van een robot moet gevalspecifiek zijn. Een volledig autonome auto kan op verschillende niveaus functioneren - sommige op de snelweg, andere op alle terreinen. Afhankelijk van de omstandigheden kunnen beide dezelfde mate van autonomie uitoefenen.
- Het ontwerp werkt het beste wanneer het de behoefte aan menselijke input minimaliseert - terwijl bepaalde autonome "cobot"-toepassingen kunnen helpen de productiviteit te optimaliseren of een gewenst doel te bereiken, in de meeste omstandigheden zou autonomie geen adequate kwalificatie zijn wanneer directe menselijke betrokkenheid Is benodigd.
Dus, hoe komen we van punt A naar B? Hoe wordt een traditionele “programmeerbare” robot volledig autonoom? Nou, daar begint het plezier!
Informatie verkrijgen over het milieu
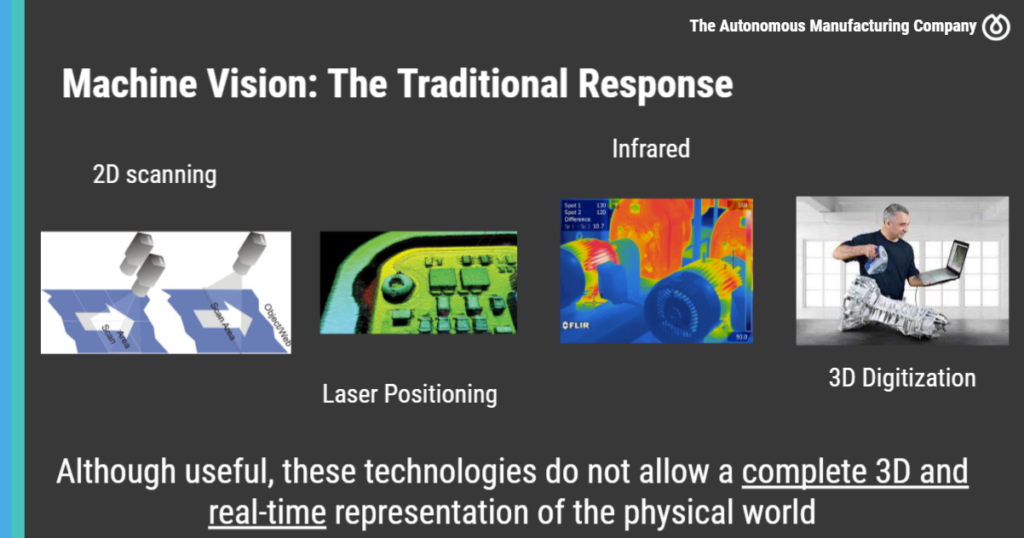
Er is een breed scala aan oplossingen om een robot te laten weten wat er om hem heen gebeurt. Lidar, radar, sonar, tactiele sensoren, allerlei soorten zichtsystemen, een eindeloos aantal verschillende communicatiemechanismen van extra-robotsensoren, camera's of lokale informatiesystemen die van nature audio of video kunnen zijn. Dit alles is gewoon een poging om robots dezelfde soort zintuigen te geven als een mens, en is al lang de standaard op gebieden als automatische machinebesturing voor zeer gespecialiseerde automatiseringsprocessen.
Het is belangrijk om te bedenken dat detectie hier niet de enige beperking is. In industriële systemen die nu IoT (Internet of Things) ondersteunen – of op zijn minst in een netwerk zijn – kunnen verschillende proces- en programmeerbare logische controllers met elkaar worden verbonden in verschillende strings die worden gebruikt om verschillende processen uit te voeren. Wat vanaf daar kan worden gedaan, is echter die informatie in robotprocessen opnemen om de positie, oriëntatie en benodigde manipulatie op een object te begrijpen.
Buiten industriële omstandigheden kunnen dezelfde modellen worden toegepast, maar ze moeten worden gecontextualiseerd met de juiste soorten verbonden informatie. Als iemand bijvoorbeeld een robot wil maken voor medische of ouderenzorg, kunnen externe detectiemogelijkheden nuttig zijn om de gezondheid van een patiënt te beheren, maar zonder de juiste beveiliging en anonimisering kunnen ze ook privacy- of agentschapsrisico's opleveren als het gaat om wie wordt behandeld. verzorgd en door welke robot onder welke omstandigheid.
Op dezelfde manier wordt 5G gezien als een belangrijke kans om toekomstige zelfrijdende auto's te coördineren en efficiëntie te genereren bij het automatiseren van elk aspect van autorijden en vervoer - en dat alles terwijl het wordt geoptimaliseerd rond zaken als wegomstandigheden, knelpunten, geblokkeerde wegen en meer. Hoewel dit zeer krachtige toepassingen zijn, moet de manier waarop informatie naar een robot wordt vertaald, delicaat worden behandeld. Met grote macht komt immers grote verantwoordelijkheid.
De informatie op een gestructureerde manier verwerken
Hoe moet men informatie op een bruikbare manier verwerken? Als we bedenken hoe we dat als mens doen, is het een tweede natuur of vaak instinctief in termen van hoe we beslissingen nemen. Wat we ons vaak niet realiseren, is dat zoveel van onze beslissingen gebaseerd zijn op evolutionair, sociaal of gedragsmatig verworven eigenschappen - evenals kenmerken van onze persoonlijkheden - waardoor de manier waarop we werken soms deterministisch lijkt, hoewel niet zonder verrassingen of plezier!
Als het echter om robots gaat, houden we niet van verrassingen! Leuke verrassingen, natuurlijk - dingen als ontdekken dat een robot beter of efficiënter is dan we hadden gehoopt, zijn geweldig, maar als dit betekent dat we moeten anticiperen op elke mogelijke functie van een autonome robot - of het nu gaat om bezorging, transport of zorgverlening , materiaalbehandeling, inspectie, voorspellend onderhoud, industriële processen of gewoon een robothond die achterwaartse salto's maakt - het managen van onze verwachtingen heeft veel meer de voorkeur dan een "falen om te functioneren".
Daarom is het belangrijk om te beseffen dat het creëren van een autonome robot zelden zal betekenen dat dingen out of the box werken. Terwijl sommige bedrijven en academici werken aan manieren om de fundamentele detectie- en verwerkingsmodellen van autonome robots te vereenvoudigen, moeten die modellen uiteindelijk bijdragen aan procesmodellen die het vermogen van een robot om informatie op een bruikbare manier te gebruiken, vereenvoudigen.
Acties plannen op basis van gegevens
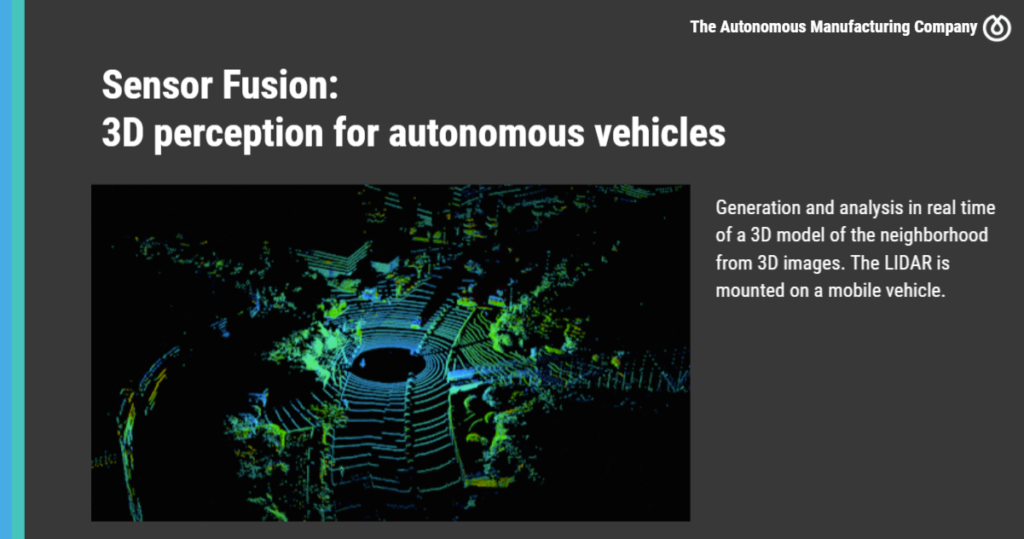
De gegevens die door de detectiemechanismen van een robot worden gegenereerd, kunnen op verschillende manieren worden verwerkt. Uiteindelijk is de eenvoudigste manier voor visuele 3D-gegevens om de gegevens op een vorm op te splitsen en opnieuw te integreren in een heel object. Dit is een parallel proces dat een opeenstapeling van vele kleine operaties vereist - terwijl het menselijk brein op deze manier zeer flexibel functioneert, vereist het genereren van betrouwbare modellen voor dit type verwerking een aanzienlijke herhaling en validatie.
Het nuttigste aspect van dit proces is het injecteren van gegevens in een algemeen procesmodel voor alles wat de robot moet doen. Iets optillen en dragen? Post in een brievenbus laten vallen? Iets aan elkaar verven of lassen? Elk van deze acties vereist een holistisch begrip van de aard, locatie, positie en niet-conforme resultaten van een doel (bijv. de post gaat in de doos, maar er zit een gat in de bodem en het valt in een struik).
Tegelijkertijd moeten, om dit mailvoorbeeld uit te breiden, fallback-doelen worden vastgesteld om op een geautomatiseerde manier een nog steeds acceptabel resultaat te bereiken zonder de hoofdprioriteiten van de autonome functie van de robot te overbelasten. Eenvoudiger:autonome robots moeten kunnen improviseren, maar het plannen van die improvisatie vergt veel werk.
Zoals Mark Twain ooit zei:"Het kost me meestal meer dan drie weken om een goede geïmproviseerde toespraak voor te bereiden." Dit is niet zomaar een glib bon mot, maar eigenlijk heel leerzaam over hoe mensen werken. Hoewel we vaak gefocust zijn op taken die voorhanden zijn, hebben we een uitgekiende reeks onderbewuste gewoonten met toegevoegde talenten zoals 'proprioreceptie', die niet goed worden herkend.
Hoewel dit perfecte vaardigheden zijn voor een robot die alles moet doen, van slingeren van bomen tot jagen op de savanne en misschien het wiel uitvinden en daarna een beetje vuren. Het heeft miljoenen jaren geduurd om deze mogelijkheden te ontwikkelen, dus wees niet verbaasd dat het meer dan een middag kan duren om een robot autonoom te laten functioneren.
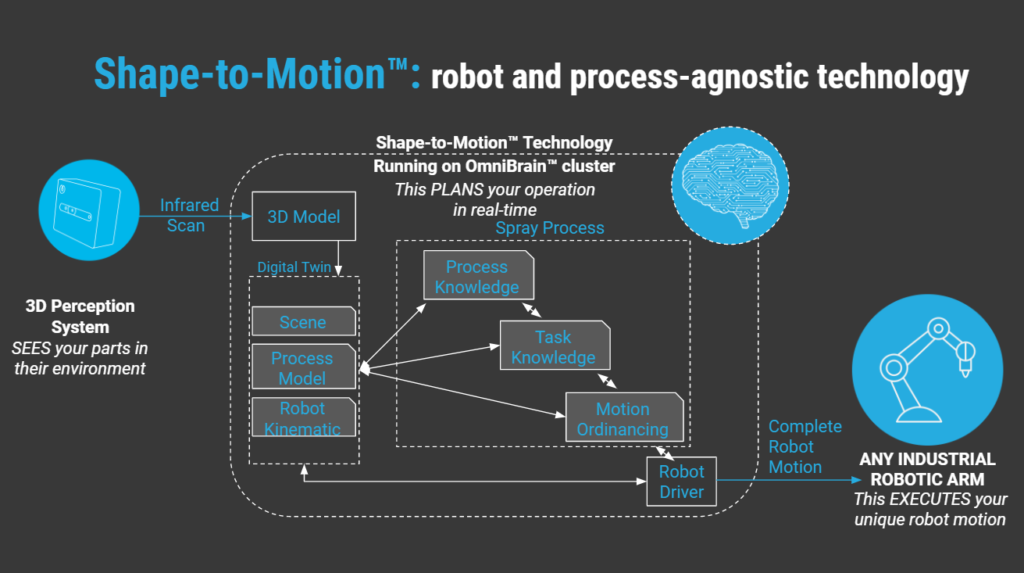
Dus, in deze context, wat is het antwoord voor robots? Nou, net zoals mensen hun acties visualiseren voordat ze ze uitvoeren, simulaties of digitale tweelingen van een autonome robotfunctie genereren en die gebruiken om zowel procesmodelverwachtingen te injecteren (zoals waar een mailbox zich gewoonlijk bevindt of hoe deze eruitziet) is de grootste stap die je kunt zetten om een bruikbare autonome robot te maken.
Het plan uitvoeren
Als je eenmaal een procesmodel, voldoende simulaties en de correct gekalibreerde detectiemechanismen hebt, is uitvoering gewoon een kwestie van observeren en optimaliseren. Als de autonome robot die u aan het bouwen bent, direct uit de doos aan uw normen voldoet, hoeft u dat niet eens te doen. De fundamentele waarde van robots is hun consistentie, en bestaande moderne industriële robots zijn buitengewoon betrouwbaar. Perceptielagen en intelligentie toevoegen om ze responsief te maken naar verschillende delen en posities creëert die hele nieuwe wereld van autonomie die we allemaal willen verkennen
Wat volgt er voor die autonomie? Het vereenvoudigen van de manier waarop applicaties worden gebouwd, zoals hierboven vermeld, maar ook het vergroten van de breedte van sensoren, robotopstellingen, taken, omgevingen en meer die kunnen worden uitgevoerd. Het gekke is dat automatisering productiviteit creëert, wat uiteindelijk leidt tot groei, inkomens en de vraag naar arbeid. Automatisering beschouwen als een bedreiging voor het personeel is de echte bedreiging , terwijl automatisering naar meer van de ruimtes wordt gebracht die werknemers niet leuk vinden zal banen creatiever, innovatiever en leuker maken dan ooit tevoren - als mensen zelfs moeten werken. Geniet ervan!

Omnirobotic biedt autonome robottechnologie voor spuitprocessen, waardoor industriële robots onderdelen kunnen zien, hun eigen bewegingsprogramma kunnen plannen en kritische industriële coating- en afwerkingsprocessen kunnen uitvoeren. Bekijk hier wat voor soort terugbetaling u ervan kunt krijgen , of leer meer over hoe u kunt profiteren van autonome productiesystemen .
Industriële robot
- Hoe spuitrobots de consistentie verbeteren
- Hoe verfrobots nabewerking verminderen
- Whitepaper:Hoe u uw robotpotentieel kunt vinden
- Hoeveel kost robotautomatisering?
- Virtual Solutions Center:hoe helpt robotsimulatie bij robotintegratie?
- Materialen om een robot te bouwen:een volledige lijst
- Ultieme gids:hoe u een juiste SCARA-robot kiest
- Robot Machine Tending:wat het is en hoe het werkt
- Hoe maakt Facebook gebruik van automatisering om belangrijke doelgroepen te bereiken?
- Hoe u de trainingstijd voor robotlassen kunt verkorten?
- Aan de slag met Yaskawa-robotprogrammering