


De toekomst van robotica
De toekomst van robotica wordt gedistribueerd. Elke complexe robot is een gedistribueerde reeks modules en systemen, sommige autonoom, sommige semi-autonoom en sommige door mensen bestuurd, die allemaal nauw samenwerken om een enkel samenhangend systeem van samenwerkende onderdelen te vormen. In telerobotica proberen we telebediening van een robot mogelijk te maken en de operator een menselijk gevoel te geven waar de robot wordt ingezet, door video en krachten van interacties terug te geven aan de menselijke operators.
Voor de ESA betekent dit in de ruimte of op een vijandig planeetoppervlak. De menselijke operator bevindt zich misschien op een ruimtestation of zelfs terug op aarde!
Om dit te doen, maken we telepresence mogelijk door een combinatie van haptische krachtfeedback naar de operator in combinatie met augmented reality-video.
Door zowel zicht- als tastfeedback aan de gebruiker te geven, is telepresence mogelijk. Hoe realistischer en informatiever de feedback, hoe groter de telepresence-perceptie van de operator, wat leidt tot een betere robotbediening op afstand.
De kritieke uitdaging voor de ESA van teleoperaties in de ruimte is de communicatieverbinding. Er zijn veel realtime regelkringen in robots, maar die tussen de mens en de robot op afstand in een teleoperatiesysteem is het meest problematisch. Er lopen verschillende regelkringen over een pakketgeschakelde netwerkverbinding die het allerslechtste communicatiegedrag vertoont. Het kan op elk moment worden verbroken, latentie kan vaak in seconden worden gemeten en enorm variëren, plus pakketverlies komt regelmatig voor; dit geldt net zo goed voor communicatie via internet als in de ruimte. Toch moeten we alle video via deze link verzenden, de tijd is gecorreleerd met de robotbesturingsstatus en besturingsopdrachten aan beide uiteinden. Dit betekent dat de verbindingsstatus een integraal onderdeel van de regelkring moet worden, met aan beide uiteinden voldoende informatie zodat de operator adequaat kan reageren en de robot op afstand zichzelf in een veilige en stabiele toestand kan houden. De linkstatus moet een integraal onderdeel worden van de systeemstatus.
ESA's ontwikkelingsteam bestaat uit mechatronische ingenieurs, computer vision-specialisten, besturingssysteemtheoretici en een paar software-ingenieurs. Het was ons al in een vroeg stadium duidelijk dat we moesten zoeken naar een gemeenschappelijke methode om de systeembehoeften en interfaces te bespreken, vooral wanneer we werden gevraagd om complexe gedistribueerde systemen te leveren met meerdere computers, verschillende hardware- en softwareplatforms om op te werken; we hebben afgerekend op gegevens. We zien data als een middel om de systeemstatus te begrijpen, als een middel om videoframes weer te geven en als middel om de regeltheorie weer te geven. Het was dus logisch om onze ontwikkelomgeving en systeemontwikkeling datacentrisch te benaderen. In combinatie met de kritieke behoefte om de status van de verbinding te begrijpen als onderdeel van teleoperatie, werden we onverbiddelijk ertoe gebracht om DDS (Data Distribution Service) te beoordelen. NASA was al een zware gebruiker van DDS in zijn ruimtecommunicatiesystemen - maar zou DDS ook teleoperatie mogelijk kunnen maken via zo'n uitdagende link, waardoor realtime controle mogelijk is over wat inderdaad de meest uitdagende verbindingen zijn? Dit is nieuw onontgonnen wetenschappelijk terrein, en daarom des te spannender. De eerste indicaties zijn buitengewoon bemoedigend.
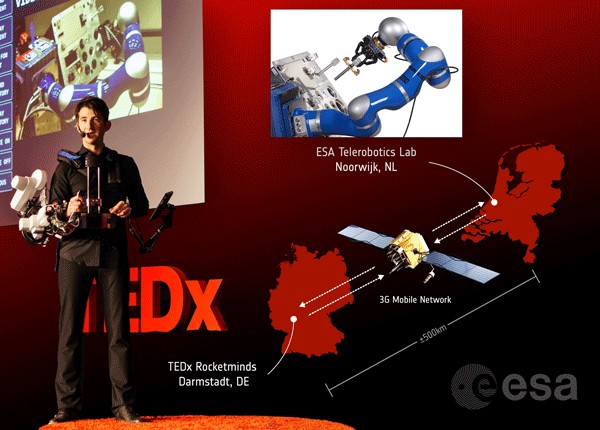
In deze live demonstratie bij TEDx RheinMain RocketMinds, mei 2014, heb ik ons EXO-1 exoskeletarm-prototype gebruikt om op afstand een robotarm te besturen die zich fysiek in onze ESA Telerobotics bevond &Haptieklab op meer dan 500 km afstand. Mijn taak was om een metalen pin op te pakken en deze in een gat te plaatsen met een spleettolerantie van minder dan 0,5 mm. De hele demo werd uitgevoerd via een op internet gebaseerde 2G-telefoon WAN-verbinding omdat de geplande 3G-verbinding onverwacht niet beschikbaar was! In de afgesloten ruimte, vol met mensen met telefoons op zak, was de bandbreedte ernstig beperkt en vertoonde het in feite het type verbinding dat in de ruimte werd ervaren - of eigenlijk veel erger. Het kan niet echt erger worden dan dat, teleopereren via een link die vertragingen vertoonde in het bereik van 15 seconden met aanzienlijk gegevensverlies. Toch slaagde DDS, die over de 2G-verbinding liep, erin om alle communicatie voor de haptische feedback, de regellus van de robotarm en de video van de robotarm in het laboratorium af te handelen (gestreamd naar zowel een tablet op mijn arm als lokaal gekloond voor weergave op de hoofdscherm van TEDx).
Het is misschien nog niet in de ruimte, maar precisie telerobotische besturing over grote afstanden en uitdagende datalinks met visie en haptische feedback is letterlijk binnen handbereik en we hebben dit aan een breed publiek gedemonstreerd .
UPDATE :Het Haptics-1-experiment werd aan boord van het internationale ruimtestation ISS uitgevoerd door NASA-astronaut Barry Wilmore. Een eerste pre-test werd uitgevoerd op 30.12.2014. Haptics-1 is het allereerste robotische forcefeedback-experiment in de ruimte. Gefeliciteerd! lees meer
De eerste keer dat #haptische feedback in de ruimte wordt gebruikt, ooit! Vandaag wordt @Space_Station#haptics-1 met succes uitgevoerd! pic.twitter.com/30zD5GzGqs
— ESATelerobotics (@ESATelerobotics) 30 december 2014
Als je een verhaal hebt over het gebruik van Connext DDS dat je wilt delen, stuur dan een e-mail naar blogadmin@rti.com.
Internet of Things-technologie
- De toekomst van live-tv
- De toekomst is... Industrie 4.0
- De toekomst is…Samenwerking
- De toekomst bouwen met robotica
- Edge computing:de architectuur van de toekomst
- De toekomst van fabrieksonderhoud visualiseren
- Robotica en de toekomst van productie en werk
- De toekomst van datacenters
- De toekomst van logistieke technologie:een Chinese eeuw?
- De geschiedenis van robotica in de maakindustrie
- AutoStore:de toekomst van autonome opslag bepalen