Industriële fabricage
Industriële robot
Inleiding: Nog maar een paar jaar geleden leek het erop dat arbeidsbesparing de drijvende factor was bij toonaangevende fabrikanten om automatisering te onderzoeken. Return on investment werd grotendeels berekend door het aantal mensen dat de automatisering zou vervangen. En als die ROI minder dan

De hersenschors is het deel van de hersenen dat beelden verwerkt. De mens heeft de grootste hersenschors vergeleken met andere zoogdieren. Deze superieure visie is een van de evolutionaire eigenschappen die mensen een voorsprong gaven op andere dieren. Evolutionaire biologen proberen het mysterie ac
Storingen met machine vision-cameras, niet-gekalibreerde sensoren of onvoorspelbare schaduwen kunnen leiden tot mogelijk kostbare en gevaarlijke fouten in industriële AI-systemen. Onderzoekers ontwikkelen echter foutbestendige algoritmen en eenvoudige maatregelen die kunnen worden genomen om de kans
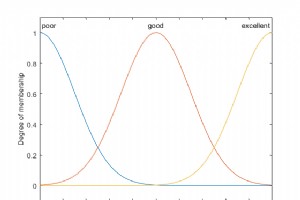
Fuzzy logic klinkt misschien niet als de meest betrouwbare manier om een complex besturingssysteem te implementeren. Het vermogen van fuzzy logic-systemen om met onnauwkeurige gegevens te werken en de ervaring van experts te implementeren, maakt het echter een krachtig hulpmiddel in moderne bestur

Programmeerbare logische controllers (PLCs) gebruiken voor robotcellen Voor robotcellen is vaak een controller nodig om delen van de cel te laten werken die doorgaans niet binnen het werkbereik van de robot vallen. Een controller, meestal een programmeerbare logische controller (PLC), bestuurt okse

Fuzzy logic-controllers zijn letterlijk overal om ons heen. Van antiblokkeersystemen tot de wasmachines die onze kleding reinigen. Maar werken ze ook echt? En wat zijn de voordelen van het gebruik ervan? Figuur 1. Moderne bewerkingen zijn vaak afhankelijk van fuzzy logic om kritieke aspecten van
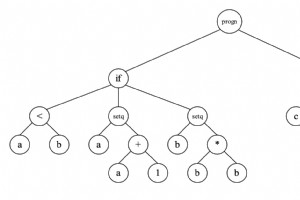
Misschien is de Heilige Graal van de informatica ontdekt op de dag dat onze machines hun eigen programmas kunnen schrijven. Genetisch programmeren (GP) is een relatief nieuw paradigma voor machinaal leren dat een stap in die richting vertegenwoordigt. GP is veelbelovend op het gebied van regeltech

De computerrevolutie begon met de oprichting van geïntegreerde schakelingen (IC) in de jaren zestig. De IC vond de afgelopen halve eeuw zijn weg naar veel industrieën. Tegenwoordig zijn er verschillende computerapparatuur die in verschillende sectoren worden gebruikt. Aanvankelijk was software de

Industriële robotica heeft geen gebrek aan merken, modellen, kleuren, vormen en maten. Maar als het gaat om mechanische ontwerpen, zijn er veel overeenkomsten tussen alle merken. Industriële gelede robotarmen worden vaak gezien als het beeld van een hightech productiefaciliteit. Zelfs de gewone co

Het bezit van een auto was vroeger een fundamenteel onderdeel van gemakkelijke toegang tot vervoer. Vandaag kan men een auto oproepen met een telefoon-app, en er zal een auto beschikbaar zijn. U hoeft zich geen zorgen te maken over onderhoud, onderhoud, schade, verzekering en dergelijke. Dit kan do

De eerste industriële revolutie begon in de 18e eeuw met de uitvinding en vooruitgang van stoommachines. Verdere technologische vooruitgang zorgde voor massaproductie en automatisering. Deze technologieën vertegenwoordigden de eerste drie evoluties van de industriële revolutie, met Industrie 4.0 als

Op dit punt in de serie genetische programmering (GP) hebben we geleerd wat genetische programmering is en hoe het informatie vertegenwoordigt, hoe genetische operators werken in evolutionaire algoritmen en hebben we een sorteerprogramma ontwikkeld door middel van symbolische regressie. Hier zullen

Laserafstandssensoren worden veelvuldig gebruikt in de robotica- en automatiseringsindustrie. Ze kunnen veel verschillende facetten van de industrie omvatten, maar dit artikel richt zich op het retrofitten van cellen voor verouderde technologie met behulp van laserafstandssensoren als positiesensore
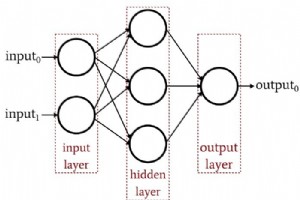
We kunnen de prestaties van een Perceptron aanzienlijk verbeteren door een laag verborgen knooppunten toe te voegen, maar die verborgen knooppunten maken de training ook wat ingewikkelder. Tot dusverre heb je in de AAC-serie over neurale netwerken geleerd over gegevensclassificatie met behulp van n
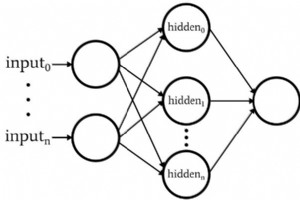
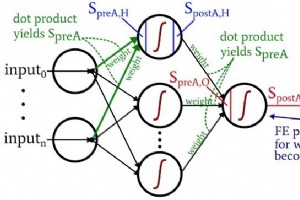
Dit artikel presenteert de vergelijkingen die we gebruiken bij het uitvoeren van berekeningen voor gewichtsupdates, en we zullen ook het concept van backpropagation bespreken. Welkom bij AACs serie over machine learning. Bekijk de serie tot nu toe hier: Hoe classificatie uitvoeren met behulp van
Dit artikel bespreekt de Perceptron-configuratie die we zullen gebruiken voor onze experimenten met training en classificatie van neurale netwerken, en we zullen ook kijken naar het verwante onderwerp van bias-knooppunten. Welkom bij de reeks technische artikelen over neurale netwerken van All Abou
Dit artikel leidt u stap voor stap door een Python-programma waarmee we een neuraal netwerk kunnen trainen en geavanceerde classificatie kunnen uitvoeren. Dit is de 12e inzending in de reeks over neurale netwerkontwikkeling van AAC. Bekijk hieronder wat de serie nog meer te bieden heeft: Hoe class
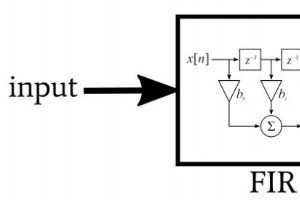
Dit artikel legt uit waarom validatie bijzonder belangrijk is wanneer we gegevens verwerken met behulp van een neuraal netwerk. AACs serie over de ontwikkeling van neurale netwerken gaat hier verder met een blik op validatie in neurale netwerken en hoe NNs functioneren bij signaalverwerking. Hoe c
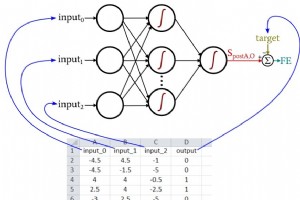
In dit artikel gebruiken we door Excel gegenereerde voorbeelden om een Perceptron met meerdere lagen te trainen, en dan zullen we zien hoe het netwerk presteert met validatievoorbeelden . Als u een neuraal netwerk voor Python wilt ontwikkelen, bent u hier aan het juiste adres. Voordat u ingaat op
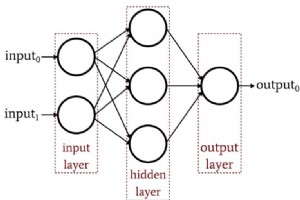
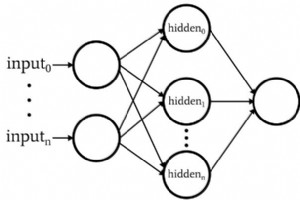
Dit artikel bevat richtlijnen voor het configureren van het verborgen gedeelte van een Perceptron met meerdere lagen. Tot dusverre hebben we in deze serie over neurale netwerken Perceptron NNs, meerlaagse NNs besproken en hoe we dergelijke NNs kunnen ontwikkelen met Python. Voordat we verder gaan m
Industriële robot