


Hoe één ingenieur stofvrije robotgravure bereikte met RoboDK
Kun je echt stofvrije robotgravure bereiken? Een universiteitsstudent gebruikte RoboDK en een aangepaste eindeffector voor robotfrezen zonder de hele werkplaats houtsnippers te krijgen. Hier is hoe ze het deden.
Graveren is een steeds populairdere taak in de productie. Maatwerk wordt de norm voor veel verschillende producten en graveren stelt fabrikanten in staat om eenvoudig aangepaste logo's en ontwerpen aan hun producten toe te voegen. Robotgraveren is een gemakkelijke manier om de waarde van het product te verhogen met heel weinig extra werk.
Een student aan een Duitse universiteit heeft een systeem ontworpen om hout te graveren met behulp van robotfrezen en een collaboratieve robot in RoboDK. Wat vooral interessant is aan dit project, is dat het een gespecialiseerde eindeffector bevat om te voorkomen dat er te veel stof en houtsnippers worden gegenereerd.
Introductie van… Jan Gosedopp
Het project is een paar jaar geleden ontwikkeld door student Jan Gosedopp als onderdeel van zijn Bachelor of Engineering aan de Hogeschool Hamm-Lippstadt in Duitsland.
We schrijven nu over zijn project omdat robotgraveren in de nabije toekomst erg populair lijkt te worden. Zo zei iemand bij fabrikant Universal Robots onlangs dat ze eraan denken om houtgravure toe te voegen aan hun steeds groter wordende lijst van collaboratieve robottoepassingen.
Het project van Gosedopp omvatte het programmeren van een universele robot en het ontwikkelen van een aangepaste graveer-eindeffector die het stof zou kunnen verwijderen.
Hoe houtgravure gewoonlijk wordt gedaan
Zoals het geval is bij veel machinale bewerkingen, is de traditionele manier om autonoom graveren te bereiken met een speciale CNC-machine.
Deze machines zijn gemakkelijk te vinden en er zijn veel concurrerende opties op de markt. Ze zijn echter over het algemeen niet flexibel - elk model is slechts geschikt voor één bepaald type gravure. Als je wilt overschakelen naar een ander graveerproces, moet je misschien een heel andere machine kopen.

Een CNC-graveur programmeren
Een van de uitdagingen van dit traditionele type gravure is het programmeren. Zoals CNC-expert James Hamilton zegt “een CNC-machine is zo goed als zijn software. En niet alle software is gelijk gemaakt.” Hij legt uit dat de software die je gebruikt de mogelijkheden van je machine echt kan beperken.
Sommige CNC-software kan bijvoorbeeld alleen 2,5D-frezen bereiken. Dit is prima voor graveren, waar je meestal alleen een 2-dimensionale vorm in het materiaaloppervlak wilt frezen. Het wordt echter beperkend als je ooit verder wilt gaan naar meer driedimensionale vormen.
Gosedopp gebruikte 2.5D roterende gravure, waarbij een draaiend frees- of freesgereedschap wordt gebruikt om dunne groeven in het hout te snijden.
Wat is robotgravure?
De aanpak van Jan Gosedopp was om helemaal geen CNC-machine te gebruiken. In plaats daarvan koos hij ervoor om een robot te gebruiken, met name de UR10 van Universal Robots.
In vergelijking met CNC-machines zijn robots erg flexibel. In feite kan een enkele robot worden gebruikt voor bijna elk type graveerproces... en nog meer taken. Het enige wat je hoeft te doen is de robot een ander gereedschap te geven, wat heel eenvoudig is te doen met de juiste robotprogrammeersoftware.
Programmeren van robotgravure
Voor het programmeren koos Gosedopp ervoor om RoboDK te gebruiken. Deze keuze hielp hem veel van de potentiële programmeerproblemen te vermijden die optreden bij traditionele CNC-machines.
Met de speciale robotfreeswizard van RoboDK is het eenvoudig om de 2,5D-gravure te krijgen die hij nodig had en geeft hij hem de mogelijkheid om 3D-frezen te gebruiken met exact dezelfde instellingen als hij die ooit nodig heeft.
Om het graveerpad te genereren, gebruikte hij Solid Works samen met de gratis HSMXpress-add-on die CAM-paden produceert. Toen hij dit project deed, was de RoboDK-werkbalk voor SolidWorks die we dit jaar uitbrachten nog niet beschikbaar. Daarom is het freespad geïmporteerd in RoboDK met behulp van G-codebestanden.
Het aangepaste gereedschap voor stofvrij graveren
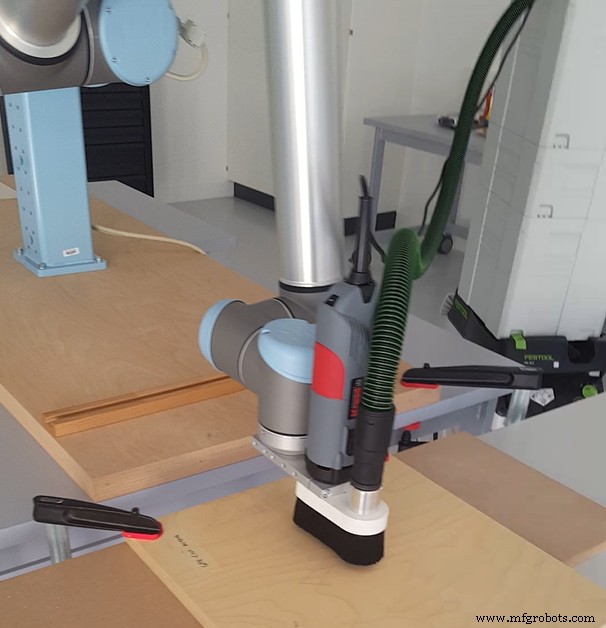
Een van de kernontwikkelingen van het project van Jan Gosedopp was een op maat gemaakte eindeffector voor robotgraveren.
Een interessant kenmerk van dit gereedschap was dat het elementen bevatte om stof en houtsnippers tijdens de bewerking van het werkstuk te verwijderen, wat een schone werkomgeving mogelijk maakte.

Belangrijke factoren voor een robot graveergereedschap
Als onderdeel van zijn bachelorscriptie evalueerde hij 2 verschillende eindeffectorontwerpen en koos hij de beste op basis van zijn geschiktheid voor de taak.
Hij beoordeelde zijn twee ontwerpen op basis van de volgende categorieën:
- Compatibiliteit met de UR3/UR10
- Mogelijkheid om de freesspil vast te klemmen
- Compatibiliteit met de extractie
- Nauwkeurige centrering en uitlijning
- Freesspil gelijk met robotflens
- Draden aan de zijkant voor bevestiging
- Afmeting van klein gereedschap
- Lage productiekosten
De twee ontwerpen leken behoorlijk op elkaar en scoorden precies hetzelfde in de meeste van deze categorieën. De enige twee verschillen tussen de ontwerpen waren de manier van bevestigen van de freesspil en de positionering van het gereedschap op de robotflens.
Uiteindelijk waren de twee factoren die zijn ontwerpkeuze bepaalden lagere productiekosten en de toevoeging van laterale schroefdraad voor extra bevestigingen.
Beveiliging
Een belangrijk punt van zorg voor dit type tool is beveiliging. De gebruikte robot was een collaboratieve robot en had dus zijn eigen veiligheidsvoorzieningen. Aangepaste tools kunnen echter extra veiligheidsproblemen veroorzaken.
Gosedopp richtte zich op twee aspecten van beveiliging:
- Gevaar door rondvliegende voorwerpen — Houtsnippers en stof kunnen gemakkelijk wegvliegen van de graveerbewerking en mensen schaden. Om dit tegen te gaan, bracht hij een borstel rond het gereedschap om rondvliegende houtsnippers op te vangen en een stofzuiger om het stof af te zuigen.
- Gevaar door mensen die de werkruimte van de freesspil betreden — Hoewel collaboratieve robots zelf over het algemeen veilig zijn, betekent dit niet dat hun tools veilig zijn. Het draaiende graveergereedschap kan een mens schade toebrengen als bijvoorbeeld zijn hand in de weg zit. De borstel rond het gereedschap zou dit tot op zekere hoogte helpen voorkomen. Gosedopp vond echter dat er meer beveiliging nodig was, dus voegde hij een veiligheidsglas en een laserscanner toe.
Het definitieve ontwerp
Na beoordeling van de twee ontwerpen kwam Gosedopp tot het definitieve ontwerp van de robot graveer-eindeffector. Het bevatte de volgende componenten:
- Frezenkop — het “zakelijke einde” van het gereedschap voor het frezen van werkstukken.
- Robotarm — de UR10 collaboratieve robot.
- PC — het programma is gegenereerd in RoboDK en geëxporteerd naar een robotprogramma.
- Controllerbox - signaalverwerking uitgevoerd en het robotprogramma uitgevoerd door RoboDK.
- Vacuüm — uitgevoerde afzuiging van stof en spanen.
- Beveiligingssysteem — er werd een laserscanner gebruikt om te detecteren of iemand de werkruimte binnenkwam en de robot te stoppen.
Ten slotte was Gosedopp in staat om de volgende toepassing voor houtgravure te realiseren, zoals te zien is in deze video:
Wat zou je kunnen doen met een stofvrije graveerrobot? Vertel het ons in de reacties hieronder of neem deel aan de discussie op LinkedIn , Twitter , Facebook, Instagram of in het RoboDK-forum .
Industriële robot
- Hoe Reinforcement Learning ooit uw industriële robotwerking kan transformeren
- Lasergraveren met DIY Arduino SCARA Robot
- Gratis robottraining met RoboDK
- Robot Drilling 101:Hoe een robotboorsysteem te implementeren?
- Verbeter uw robotproductie met de Inventor-plug-in
- Hoe Hollywood verbluffende rekwisieten maakt met robotfrezen
- RoboDK viert 5 jaar succesvolle evolutie
- Hoe u het management kunt overtuigen om in te stemmen met robotbewerking?
- Casestudy:hoe Kane Robotics orbitaal polijsten bereikte met RoboDK
- Aan de slag met Yaskawa-robotprogrammering
- Aan de slag met RoboDK voor Raspberry Pi