


Invloed van elastische stijfheid en oppervlakteadhesie op het stuiteren van nanodeeltjes
Abstract
Korrelbotsingen worden gekenmerkt door een drempelsnelheid, die het lage snelheidsregime van het kleven van korrels scheidt van het hoge snelheidsregime van het stuiteren van korrels:de stuitsnelheid, v b . Deze parameter is vooral belangrijk voor nanokorrels en heeft toepassingen in bijvoorbeeld de astrofysica waar het de beschrijving van botsingsstofaggregatie binnenkomt. Analytische schattingen zijn gebaseerd op de macroscopische Johnson-Kendall-Roberts (JKR)-theorie, die de afhankelijkheid van v voorspelt b op de straal, elastische stijfheid en oppervlaktehechting van korrels. Hier voeren we atomistische simulaties uit met modelpotentialen waarmee we deze afhankelijkheden voor nanograin-botsingen kunnen testen. Onze resultaten laten niet alleen zien dat JKR de afhankelijkheid van materiaalparameters kwalitatief goed beschrijft, maar wijzen ook op aanzienlijke kwantitatieve afwijkingen. Deze zijn het meest uitgesproken voor kleine hechting, waarbij elastische stijfheid geen invloed heeft op de waarde van de stuitersnelheid.
Achtergrond
Het meest elementaire proces van granulaire mechanica is ongetwijfeld de botsing van twee korrels. Bij grote korrelsnelheden scheiden korrels zich weer na de botsing, en de uitkomst van de botsing kan worden gekarakteriseerd door de klassieke mechanica van inelastische botsingen. Bij kleine korrelsnelheden zullen korrels echter blijven plakken. De grens tussen plakkende en stuiterende botsingen [1] kan de stuitsnelheid worden genoemd, v b . Deze parameter is vooral belangrijk voor nanokorrels en heeft toepassingen in bijvoorbeeld de astrofysica waar het de beschrijving van botsingsstofaggregatie [2, 3] binnenkomt.
Macroscopische contactmechanica is gebruikt om een voorspelling af te leiden voor v b . Het is gebaseerd op de Johnson-Kendall-Roberts (JKR)-theorie [4], die de botsing van twee adhesieve bollen beschrijft met behulp van de elastische stijfheid en de oppervlakteadhesie als fundamentele fysica-invoer. Kwantitatief worden deze hoeveelheden beschreven door de inspringmodulus, E ind =E /(1−ν 2 ), waarbij E is de Young modulus en ν het Poisson-getal, en door de oppervlakte-energie γ . Met de bolstraal R en de massadichtheid ρ , de stuitsnelheid van twee identieke bollen luidt [1, 5, 6]
$$ {v_{b}} =\left(\frac {C} {\rho} \right)^{1/2}\left(\frac {\gamma^{5}} {E_{\text{ind }}^{2} R^{5}} \right)^{1/6}. $$ (1)De waarde van de constante C hangt sterk af van de aannames van energiedissipatie tijdens de botsing en is besproken om waarden tussen 0,3 en 60 aan te nemen [1, 7].
De validiteit van deze voorspelling is voornamelijk onderzocht met betrekking tot de afhankelijkheid van de grootte [1, 5-8]. Bij afnemende korrelgrootte worden de adhesiekrachten belangrijker en neemt de stuitersnelheid toe. Inderdaad, experimenten met nanokorrels (Ag- en NaCl-korrels) [9] vinden v b in het bereik van 1 m/s liggen voor korrelgroottes van enkele 10 nm, maar sterk toenemen voor kleinere korrels. Atomistische simulaties gebaseerd op moleculaire dynamica (MD) hebben de voorspelde R . bevestigd −5/6 afhankelijkheid voor botsingen tussen amorfe silicakorrels van de grootte R =15–25 nm [7].
Tot nu toe was de voorspelde afhankelijkheid van v b op de materiaalparameters E ind en γ is niet uitgebreid getest. Dit is niet gemakkelijk experimenteel te doen, omdat verschillende materialen meestal in beide hoeveelheden verschillen. Met behulp van MD kunnen we echter modelmaterialen construeren die identieke eigenschappen hebben, maar slechts in één aspect verschillen, ofwel E ind of γ . In dit artikel kiezen we een model voor Cu [10], maar variëren de materiaalparameters royaal met maximaal één orde van grootte van de werkelijke waarden. Omdat we in dit systeem geen bounce voor amorfe nanodeeltjes vinden, richten we ons op kristallijne (fcc) korrels.
Methoden/experimenteel
We gebruiken het Morse-potentieel,
$$ U(r) =D \left[ e^{-2\alpha(r-r_{0})} - 2 e^{-\alpha(r-r_{0})} \right], $$ (2)om de interactie te beschrijven tussen twee atomen op afstand r . De drie Morse-parameters D , α , en r 0 zijn bepaald om de roosterconstante a . te beschrijven , de bulkmodulus B , en de cohesieve energie E coh van een bulk fcc solid.
Voor de zekerheid stellen we de roosterconstante vast op a =3,615 Å (geschikt voor Cu) in deze studie en neem ook de atomaire massa van Cu over, om de massadichtheid ρ te behouden in verg. (1) vast. Het potentieel wordt afgesneden bij r c =2.5een; dus hebben 12 naburige schillen, waaronder in totaal 248 atomen, interactie met elk atoom. Een aantal van 100 potentiëlen wordt geëvalueerd voor B in het bereik van 403 tot 1008 GPa, en E coh in het bereik van 0,35 tot 3,54 eV. Merk op dat de hier bestudeerde bulkmoduli groter zijn en dat de cohesieve energieën kleiner zijn dan de waarden van reëel Cu (B =134.4 GPa, E coh =3.54 eV [11]), omdat we voor de echte waarden geen stuitering hebben waargenomen.
We bepalen de inspringmodulus E ind voor uniaxiale spanning in (100) richting van de Young modulus en het Poisson-getal in deze richting ([12], p. 32). Afbeelding 1 a toont de afhankelijkheid van E ind op B . We zien dat deze grootheden een lineair verband gehoorzamen; bij constante bulkmodulus laat een afname van de cohesieve energie E ind verhogen.

Materialen parameters. Afhankelijkheid van a de inspringingsmodulus E ind op de bulkmodulus B en van b de oppervlakte-energie γ op de cohesieve energie E coh
De oppervlakte-energie van (100) facetten wordt berekend uit het energieverschil van een bulkkristal en een kristal met een open (100) oppervlak door het oppervlak van het open oppervlak te delen [13]. Figuur 1b laat zien dat γ is ongeveer evenredig met E coh; afwijkingen zijn alleen zichtbaar bij kleinere stijfheden en sterk verlijmde materialen.
We construeren korrels door een bol met straal R . te snijden =9een =33 Å uit het fcc-rooster, met ongeveer 12.000 atomen. Door hun constructie hebben ze een gefacetteerd oppervlak. Ze zijn ontspannen om hun oppervlakken in evenwicht te brengen; lichte oppervlakterelaxatie, maar er werd geen reconstructie van het oppervlak waargenomen. De botsingen worden gestart door de korrels te dupliceren en ze met een relatieve snelheid naar elkaar toe te schieten v . Alleen centrale botsingen worden beschouwd, waarbij de twee tegenover elkaar liggende (100) facetten frontaal botsen, zie Fig. 2.

Eerste configuratie van de botsing
Voor het bepalen van de stuitersnelheid voeren we botsingen uit met verschillende snelheden. Het hier gebruikte algoritme is gebaseerd op een eenvoudig bisectieschema. We hebben geverifieerd dat botsingen met een snelheid van 250 m/s stuiteren voor alle hier bestudeerde botsingssystemen, terwijl botsingen met de verdwijnsnelheid blijven hangen. Vervolgens worden simulaties uitgevoerd met het rekenkundig gemiddelde van de laagst bekende stuitersnelheid en de hoogste bekende hechtsnelheid. Deze procedure wordt herhaald totdat het verschil tussen de hoogste en de laagste stuitsnelheid minder is dan 10% van hun gemiddelde waarde. v b wordt genomen als het rekenkundig gemiddelde van de hoogste insteeksnelheid en de laagste stuitersnelheid; deze twee laatste waarden worden ook genomen om de fout van onze berekening in de grafieken aan te geven. De simulaties zijn uitgevoerd met de open-source software LAMMPS [14], en de code is in wezen dezelfde als die in onze eerdere studies over botsingen van silica [7] en waterijsdeeltjes [15].
Resultaten
Figuur 3 geeft een overzicht van de verkregen resultaten. Een algehele power-law fit wordt geleverd door
$$ {v_{b}} \propto \gamma^{0.588} E_{\text{ind}}^{-0.155}. $$ (3)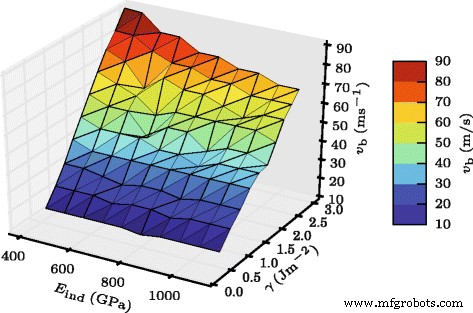
Stuiterende snelheid. Driedimensionale grafiek van de afhankelijkheid van de stuitersnelheid v b op de inspringmodulus E ind en de oppervlakte-energie γ
Dus de belangrijkste kenmerken van de JKR-wet, Vgl. (1)—een toename van v b met adhesie en een afname met elastische stijfheid - worden gereproduceerd, maar de afhankelijkheden zijn zwakker dan die in het JKR-geval.
In figuur 4 wordt nader ingegaan op deze afhankelijkheden. Omdat we de stuitersnelheden hebben bepaald voor materialen met een vaste B of E coh , zullen we ze analyseren voor deze vaste waarden, maar de afhankelijkheden presenteren in termen van E ind en γ om verbinding te maken met de JKR-voorspelling, Vgl. (1). Voor constante cohesieve energie E coh , v b hangt als een machtswet af van de elastische stijfheid,
$$ v_{b} \propto E_{\text{ind}}^{-a}, $$ (4)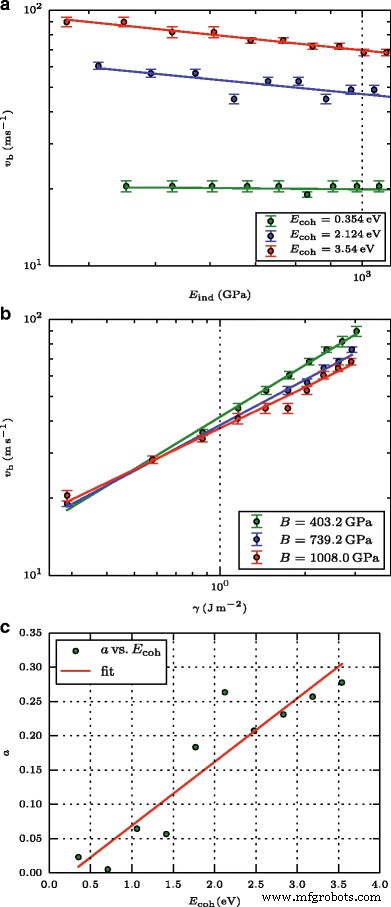
Stuiterende snelheid. Afhankelijkheid van de stuitersnelheid v b op de a inspringingsmodulus E ind en de b oppervlakte-energie γ . Lijnen duiden power-law-fits aan. c toont de afhankelijkheid van de machtsexponent, a , Verg. (4), op de cohesieve energie. De lijn geeft een lineaire pasvorm aan om het oog te geleiden
waar a =0,28 (0,26, 0,02) voor E coh =3,54 (2,12, 0,35) eV. Dus de exponent a =0,33 voorspeld door JKR wordt inderdaad bijna hersteld voor hoge oppervlakte-energieën; de afhankelijkheid wordt echter zachter met afnemende γ en verdwijnt helemaal voor zwak hechtende oppervlakken. Merk op dat in het geval van verdwijnende oppervlakte-energie, alle botsingen moeten stuiteren; dit verklaart de verdwijnende rol van de elastische stijfheid in dit geval.
Figuur 4 c toont de machtsexponenten van de afhankelijkheid van v b (E ind ), vgl. (4), verkregen uit onze simulaties. De plot laat duidelijk de toename van de afhankelijkheid van E . zien ind met toenemende cohesie-energie, en dus oppervlakte-energie, zoals aangegeven door de rode lineaire fit-lijn.
Voor vaste elastische stijfheid, B , de afhankelijkheid van v b op γ toont een eenvoudiger beeld, zie Fig. 4 c. Machtswet past, v b ∝γ −b , geef tamelijk consistente waarden van b =0,67 (0,59, 0,53) voor B =403 (739, 1008) GPa, en vertonen dus slechts een lichte afhankelijkheid van B en daarom E ind . Merk echter op dat deze afhankelijkheden zachter zijn dan de waarde van b =0,83 voorspeld door Vgl. (1). Met toenemende stijfheid worden de afwijkingen van de JKR-voorspelling sterker. Het is inderdaad bekend dat JKR faalt voor te stijve systemen [16, 17]. Voor dergelijke systemen wordt aangenomen dat de Derjaguin-Muller-Toporov (DMT) theorie [18] beter van toepassing is; uit die theorie lijkt echter geen voorspelling voor de stuitersnelheid te zijn voortgekomen.
Over het algemeen zijn de stuitersnelheden die hier worden gevonden lager dan 100 m/s. We benadrukken dat voor realistische waarden van het Morse-potentieel zoals geschikt voor Cu, we plakken over het hele bereik van snelheden vinden en geen stuiteren. Dit komt overeen met recente simulaties van Cu-bol (7-22 nm diameter) botsingen met een Al-oppervlak uitgevoerd door Pogorelko et al. [19, 20] die vastkleven vinden tot snelheden van 1000 m/s. De reden dat we stuiteren in onze simulaties vinden, is dat we modelpotentialen gebruiken waarin de elastische moduli royaal worden verhoogd en de oppervlaktebinding wordt verlaagd, met betrekking tot de waarden die echt Cu kenmerken.
Boven de stuiterdrempel worden botsingen gekenmerkt door de restitutiecoëfficiënt,
$$ e=|v'|/|v|, $$ (5)die de relatieve snelheid na botsing vergelijkt, v ′ , naar die voor de botsing, v , en meet zo de inelasticiteit van de botsing. Voor plakkende botsingen, blijkbaar, e =0. JKR-theorie suggereert een wet [4-6]
$$ e_{\text{JKR}} =\alpha \sqrt{1- \left(\frac{v_{b}}{v} \right)^{2}}, $$ (6)waar we de factor α . hebben geïntroduceerd om rekening te houden met energiedissipatie [7].
Figuur 5 toont twee gevallen van de snelheidsafhankelijkheid van e; we vinden dat deze representatief zijn voor het hele scala van onderzochte stijfheids- en hechtingswaarden. In al deze gevallen is er geen grote energiedissipatie tijdens de botsing; α ligt rond de 0,9. Bij voldoende grote oppervlakte-energieën, Fig. 5a, e volgt vrij goed de JKR-voorspelling, Vgl. (6). Bij kleine γ , echter, Fig. 5b, wordt een smallere overgangszone gezien, waarin e schakelt van 0 naar bijna 1; deze overgangszone wordt niet goed beschreven door de JKR-voorspelling, Vgl. (6).

Restitutiecoëfficiënt. Afhankelijkheid van de restitutiecoëfficiënt, e , over botssnelheid, v , voor een sterk (γ =2,32 J/m 2 ) (een ) en een zwak (γ =0,89 J/m 2 ) (b ) klevend oppervlak. De bulkmodulus is in beide gevallen identiek, B =940.8. Symbolen geven simulatieresultaten aan, terwijl de curve past bij de JKR-voorspelling, Vgl. (6), met α =0,86 (een ) en 0,95 (b )
Discussie
In het plakregime blijft de restitutiecoëfficiënt onder 1 wat wijst op inelastische energieverliezen tijdens de botsing. We hebben geverifieerd dat de botsingen puur elastisch zijn in die zin dat er tijdens de botsing geen permanente plasticiteit werd gegenereerd; de softwaretool OVITO [21] werd gebruikt om te controleren op dislocatieproductie. Voor hogere snelheden, v>100 m/s, en meegevende bollen, dislocaties werden tijdelijk gevormd maar verdwenen weer na de botsing. We merken op dat tijdens de botsing van kristallijne nanosferen van vergelijkbare grootte die interageren via het generieke Lennard-Jones-potentieel, ruime dislocatieproductie kon worden gedetecteerd [22, 23], terwijl shear-transformatiezones werden geïdentificeerd bij de botsing van amorfe silicabollen [7], beide botsingssystemen vertonen dus plasticiteit. In ons geval voorkomen de hoge elastische moduli het ontstaan van plastische vervorming; inelastische energieverliezen worden alleen veroorzaakt door de excitatie van trillingen in de botsende bollen. Geconcludeerd kan worden dat het bestaan van stuiterende botsingen verband houdt met een onderdrukking van inelastische verliezen tijdens de botsingen en dus met de onderdrukking van plastische vervorming.
Het gedrag van e voor kleine γ onderstreept onze bovenstaande bevindingen voor v b dat grote afwijkingen van JKR worden vertoond voor zwak hechtende systemen. We concluderen dat voor zwakke hechting de stuitersnelheid, en ook de toestand van het systeem na het stuiteren slechts in geringe mate afhankelijk is van andere systeemkenmerken, zoals E ind en v .
Conclusies
De voorspelling van de JKR-theorie van adhesieve elastische contacten is getest door speciale MD-simulaties van nanokorrels met behulp van modelpotentialen. We vinden dat de grove trends van de afhankelijkheid van de stuitersnelheid redelijk goed worden gereproduceerd door de JKR-theorie wanneer de materiaalstijfheid en de materiaaladhesie tot een orde van grootte worden gevarieerd. We vinden echter systematische afwijkingen voor zwak hechtende korrels; in dit geval wordt de stuitingsdrempel onafhankelijk van de materiaalstijfheid en vertoont de restitutiecoëfficiënt bijna geen snelheidsafhankelijkheid boven v b . Ook voor een sterkere hechting, de afhankelijkheid van de stuitersnelheid van γ is systematisch kleiner dan voorspeld door JKR.
Deze afwijkingen wijzen op een onvolledige beschrijving van nanodeeltjesbotsingen door macroscopische contacttheorie. Toekomstig werk zal proberen deze studie uit te breiden tot kristallijne korrels met andere oriëntaties en met grotere stralen, en tot amorfe korrels.
Nanomaterialen
- Nanodeeltjes voor kankertherapie:huidige vooruitgang en uitdagingen
- Preparatie en magnetische eigenschappen van kobalt-gedoteerde FeMn2O4-spinel-nanodeeltjes
- Eenvoudige synthese en optische eigenschappen van kleine selenium nanokristallen en nanostaafjes
- In vitro onderzoek naar de invloed van Au-nanodeeltjes op HT29- en SPEV-cellijnen
- Vorming en lichtgevende eigenschappen van Al2O3:SiOC-nanocomposieten op basis van aluminiumoxide-nanodeeltjes gemodificeerd door fenyltrimethoxysilaan
- Invloed van elastische stijfheid en oppervlakteadhesie op het stuiteren van nanodeeltjes
- Recente ontwikkelingen in synthetische methoden en toepassingen van zilveren nanostructuren
- Onderkoeling van water gecontroleerd door nanodeeltjes en ultrageluid
- Eigenschappen van zinkoxide-nanodeeltjes en hun activiteit tegen microben
- Oppervlakteslijpdiensten:proces en precisie
- Wat is vlakslijpen en waarom is het belangrijk?