


Belangrijkste factoren bij het ontwerpen van de elektronische snelheidsregeling van een drone
De sleutel tot het ontwerp van een drone is de mogelijkheid om de snelheid en rotatie van de motor te regelen. De meeste drones worden aangedreven door borstelloze gelijkstroommotoren, die een constante regeling van snelheid en draairichting vereisen. Een elektronische snelheidsregeling (ESC) -module voert deze functies uit en omvat een voedingstrap, een stroomdetectiecircuit, een microcontroller en een communicatie-interface met het vluchtcontrolesysteem, waardoor het van fundamenteel belang is voor drones. Dit artikel gaat in op de belangrijke elementen waarmee rekening moet worden gehouden bij het ontwerpen van een ESC en bij de ontwikkelingsoplossingen van de markt.
Motorbesturing
Het ontwerp van een ESC vereist een zorgvuldige evaluatie en analyse van kenmerken die als volgt kunnen worden samengevat:
- Batterij geïnstalleerd op de drone
- Motoren
- Beschikbaar budget
- Elektromagnetische compatibiliteit (EMC) en storingsimmuniteit
Er kunnen twee soorten borstelloze motoren op drones worden geïnstalleerd:borstelloze gelijkstroommotoren (BLDC's) en borstelloze wisselstroommotoren (BLAC's), ook bekend als synchrone permanentmagneetmotoren (PMSM's). De keuze welk type motor moet worden gebruikt, wordt beïnvloed door het gekozen besturingsalgoritme, dat trapeziumbesturing of veldgeoriënteerde besturing (FOC) kan zijn. Het trapeziumvormige motorbesturingsalgoritme heeft de volgende hoofdkenmerken:
- Motorbesturing op basis van een zesfasige schakelvolgorde
- Detectie van de magnetische hoek van de rotor, gebruikt om de juiste hoek in te stellen; elke stap komt overeen met een hoek van 60°
- In sensorloze besturingssystemen wordt de schakelhoek geschat door de EMF-fasespanning aan de achterkant te meten
Het FOC-regelalgoritme daarentegen heeft de volgende kenmerken:
- Motorbesturing door middel van sinusvormige fasespanningen of -stromen (FOC)
- Rotorhoekdetectie met een minimale nauwkeurigheid van 1° tot 5°, wat ervoor zorgt dat het algoritme altijd het maximale koppel kan leveren
In sensorloze regelsystemen wordt de magnetische hoek van de motor geschat op basis van de motorfasespanningen en -stromen. Zijn positie wordt bepaald door het bewaken van bepaalde elektrische parameters van de motor en zonder het gebruik van extra sensoren. Het meest voorkomende type dat in drones wordt gebruikt, is de borstelloze gelijkstroommotor vanwege zijn kleine formaat, relatief lage kosten en hoge duurzaamheid en robuustheid.
De meeste drones hebben minimaal vier motoren, waarvan de versie met vier motoren het meest wordt gebruikt. De ESC is verantwoordelijk voor het regelen van elke motorsnelheid en daarom omvat de meest voorkomende drone-architectuur het specifieke gebruik van een ESC voor elke motor. Alle ESC's moeten met elkaar kunnen communiceren, direct of indirect, via de vluchtcontroller, om de drone gemakkelijk te kunnen besturen. De richting van elke motorrotatie is ook belangrijk:in een quadricopter draait één paar motoren in de ene richting, terwijl de andere in de tegenovergestelde richting draait.
De motorbesturingstechniek die het meest wordt gebruikt door ESC-fabrikanten is veldgerichte besturing, een techniek die het motorkoppel en de snelheid regelt. Indien correct geïmplementeerd, kan FOC zelfs snelle acceleratieveranderingen aan zonder instabiliteit te veroorzaken, waardoor de drone complexe manoeuvres kan uitvoeren terwijl de efficiëntie wordt gemaximaliseerd.
Het blokschema in Afbeelding 1 hieronder toont een FOC-architectuur die de volgende componenten omvat:
- Stroomregelaar bestaande uit twee integrale proportionele regelaars
- Optionele externe lussnelheidsregelaar en referentiestroomgenerator
- Clarke, Park en inverse Park-transformaties voor conversie van stationaire naar roterende synchrone frames
- Een ruimtevectormodulatoralgoritme om vα- en vβ-opdrachten om te zetten in pulsbreedtemodulatiesignalen die worden toegepast op statorwikkelingen
- Beschermings- en hulpfuncties, inclusief logica voor opstarten en afsluiten
- Optionele waarnemer om de hoekpositie van de rotor te schatten als sensorloze besturing gewenst is
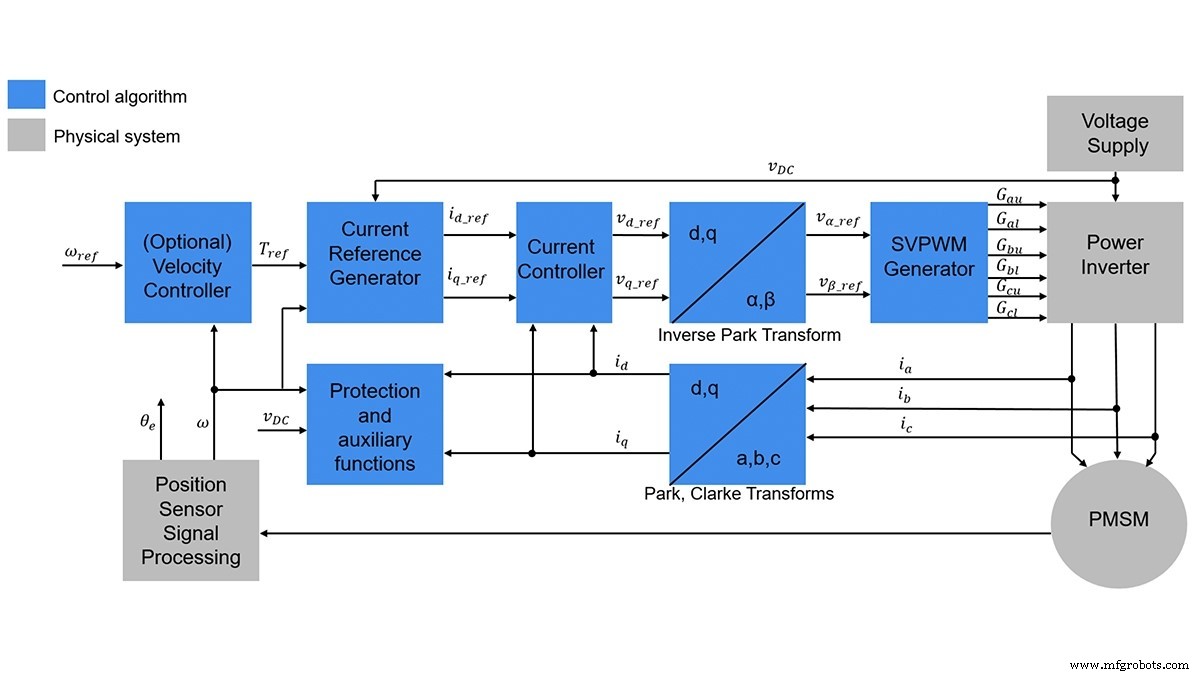
Figuur 1. Blokschema van veldgerichte besturing (Bron:Mathworks)
Motorbesturingsingenieurs die een FOC ontwerpen, voeren verschillende taken uit, waaronder het ontwikkelen van de controllerarchitectuur met twee PI-controllers voor de stroomlus, het optimaliseren van de winst van alle PI-controllers om aan de prestatie-eisen te voldoen, en het ontwerpen van een ruimtevectormodulator om PWM te regelen.
Nadat het regelalgoritme is gekozen (trapeziumvormig of FOC), is de volgende stap om te kiezen tussen een regelsysteem met open of gesloten regelkring. Bij open-loopregeling wordt de synchrone motor (BLDC of BLAC) aangedreven via een regelsignaal en wordt aangenomen dat deze de opgedragen regelactie volgt. In het gesloten regelsysteem kan het circuit controleren of de motor beweegt zoals bedoeld. Als dit niet het geval is, compenseert het besturingssysteem automatisch de over- of onderbeweging door de stroom te verminderen of te verhogen.
Bij gebruik van een closed-loop of open-loop (sensorloos) regelsysteem, moeten stromen en spanningen worden gemeten om als feedbacksignalen te worden gebruikt. Figuur 2 toont een typische meetopstelling, geschikt voor zowel trapezium- als sinusoïdale controlesystemen. Door trapeziumbesturing te gebruiken met een sensorloos algoritme, worden de driefasige spanningen gebruikt door het sensorloze algoritme om de rotorhoek te berekenen.
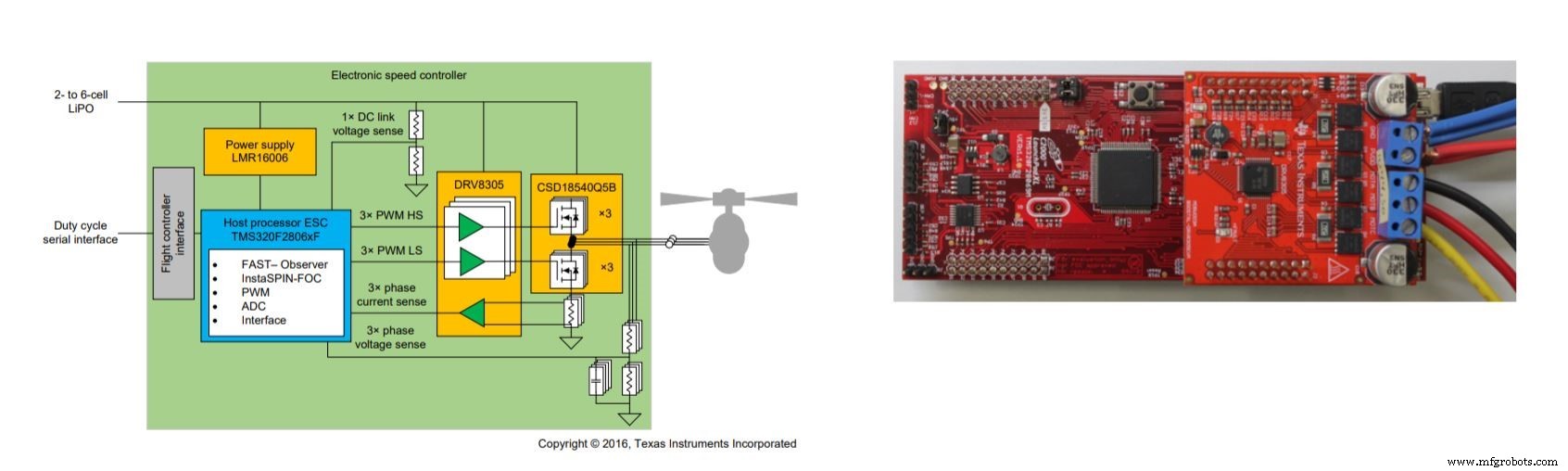
Figuur 2. ESC met sensorloze motorbesturing. Aan de rechterkant is het High-Speed Sensorless-FOC Reference Design for Drone ESC's van Texas Instruments, en aan de linkerkant is het blokdiagram. (Bron:Texas Instruments)
Quadcopter-dynamiek
De mechanische eenvoud en aerodynamische stabiliteit van drones zijn gekoppeld aan het gecoördineerde gebruik van motoren en hun manoeuvres. In een quadcopter draait het paar motoren dat op de diagonaal van de constructie is geplaatst in dezelfde richting, maar in de tegenovergestelde richting van de andere twee motoren. Als alle vier de motoren met dezelfde snelheid draaien, kan de drone klimmen, dalen of in horizontale vlucht blijven. Als het diagonale paar sneller draait dan het andere, draait de drone rond zijn zwaartepunt en blijft in hetzelfde horizontale vlak (Figuur 3).
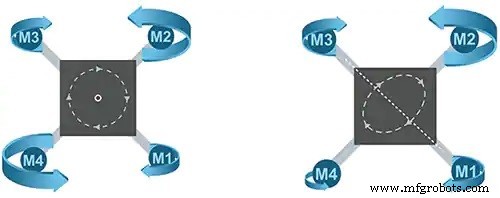
Figuur 3. Drones gebruiken verschillende combinaties van rotorsnelheden om manoeuvres uit te voeren. (Bron:STMicroelectronics)
Als je de snelheid van de kop (of staart) rotor verandert, zal de drone omhoog of omlaag wijzen als een vliegtuig met vaste vleugels dat naar beneden duikt. Bij het aanpassen van het koppel naar links of rechts gaat de drone rollen, waardoor deze om zijn as draait. Het is aan het vluchtcontrolesysteem van de drone om de juiste rotorsnelheid te wijzigen om de vlieghoogte te bereiken die nodig is om de gewenste manoeuvre te voltooien.
Voor een regeltechnicus is snelheidscorrectie een veelvoorkomend feedbackprobleem van de regelkring dat wordt opgelost met een proportionele, integrale, afgeleide (PID) regelaar.
Een ESC ontwerpen
Het ontwerpen van een ESC voor drones vereist hoogwaardige componenten die speciaal zijn ontworpen om motoren met een hoog toerental (12.000+ tpm) aan te sturen. Texas Instruments heeft een familie van MCU's ontwikkeld, InstaSPIN genaamd, die het ontwerp van driefasige motorbesturingstoepassingen vereenvoudigt. InstaSPIN-FOC, geschikt voor sensorloze systemen, beschikt over een snelle software-encoder met koppel- en snelheidsregeling die geschikt is voor elke driefasenmotor. InstaSPIN-MOTION is gericht op sensorloze systemen en biedt positie-, snelheids- en koppelregeling voor elke driefasenmotor.
Een compleet referentieontwerp voor deze scopes wordt geleverd door TI en bestaat uit InstaSPIN-FOC en InstaSPIN-MOTION motorbesturingstechnologieën. Het platform bevat een 32-bits TI C2000 InstaSPIN-microcontroller. Hiermee kunnen ontwikkelaars een driefasenmotor identificeren, automatisch aanpassen en besturen, wat snel een stabiel en functioneel motorbesturingssysteem oplevert.
STMicroelectronics biedt een compleet ESC-referentieontwerp, waarbij een sensorloos FOC-algoritme wordt geïmplementeerd. Het STEVAL-ESC001V1 ESC-referentieontwerp is geschikt voor commerciële drone-ontwerpen op instapniveau en drijft elke driefasige borstelloze motor (of PMSM) aan die wordt aangedreven door 6S LiPo-batterijpakketten of een gelijkwaardige gelijkstroomvoeding, tot 30 A piekstroom. Met STEVAL-ESC001V1 kunnen ontwerpers hun applicatie snel ontwikkelen dankzij een compleet voorgeconfigureerd firmwarepakket (STSW-ESC001V1), dat een sensorloos veldgeoriënteerd gecontroleerd algoritme implementeert met drie-shuntstroomaflezing, snelheidsregeling en volledig actief remmen. Met het STSW-ESC001V1-firmware-/softwarepakket plus de STM32 PMSM FOC-softwareontwikkelingskit MC-bibliotheek kan het ESC-ontwerp worden geoptimaliseerd door in te werken op de FOC-parameters die zijn ingebed in een STM32 MCU en wordt gebruik gemaakt van de ST-motorprofiler om snel de relevante motorparameters op te halen. Het sensorloze FOC-algoritme van ST kan worden aangepast aan elke driefasige BLDC- of PMSM-motortoepassing, wat zorgt voor langere vliegtijden en optimale dynamische prestaties (afbeeldingen 4 en 5).
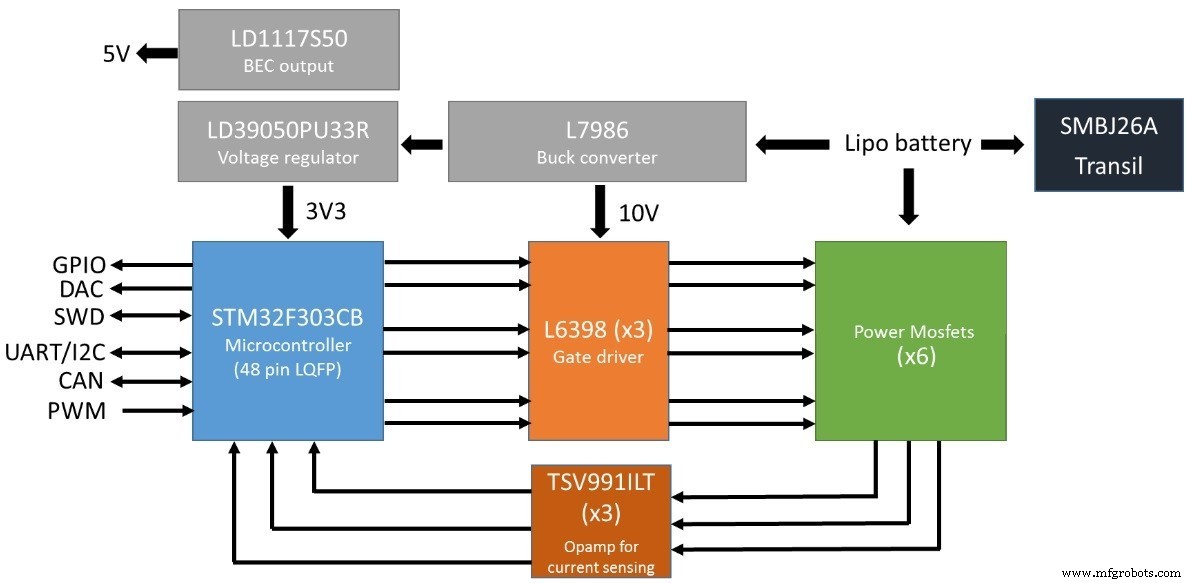
Figuur 4. Blokschema van ST's STEVAL-ESC001V1-oplossing (Bron:STMicroelectronics)
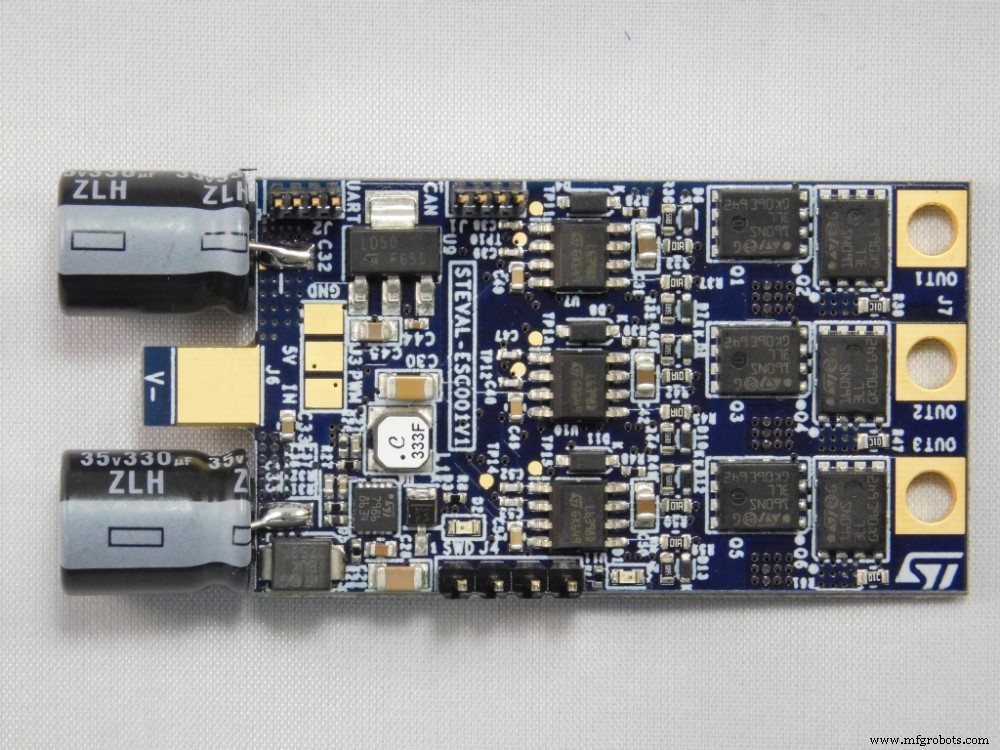
Figuur 5. ST's STEVAL-ESC001V1-kaart (Bron:STMicroelectronics)
Het HoverGames drone-ontwikkelingsplatform is een modulaire en flexibele NXP hardware/software-oplossing die kan worden gebruikt om elk autonoom voertuig te bouwen, van drones en rovers tot UAV's. De ontwikkelkit is in wezen gebaseerd op een microprocessor met Linux en Open CV en verschillende bijbehorende sensoren om de vlucht te begeleiden.
De flight controller zorgt ervoor dat de drone stabiel blijft staan. Het bord is open-source met de mogelijkheid om andere externe sensoren in te voegen om de werking te optimaliseren op basis van de functionaliteit.
Een LiPo-batterij en landspecifieke telemetrieradio moeten worden geïmplementeerd met behulp van een van de IoT-verbindingen. Voor een volledige functionaliteit van de kit, moet u selecteren welke van de twee beschikbare telemetrieradio's u wilt kopen. Via telemetrie kunt u tijdens de vlucht een live verbinding met het voertuig hebben en de status van de drone tijdens de vlucht zien, autonome waypoints laden en bedienen en de nodige wijzigingen aanbrengen. Telemetriegegevens worden naar het controlestation gestuurd, maar ook aan boord in de flight unit opgeslagen.
Kitcomponenten omvatten ook DC-naar-DC-voedingsmodule, GPS NEO-M8N-module met montage, veiligheidsschakelaar, zoemer, heldere RGB-status-LED, SEGGER J-Link EDU Mini/FTDI USB-TTL-3V3-kabel/debug-breakout-kaart met kabel , BLDC borstelloze motoren 2212 920 kV en ESC-motorcontrollers 40 A OPTO (Figuur 6).
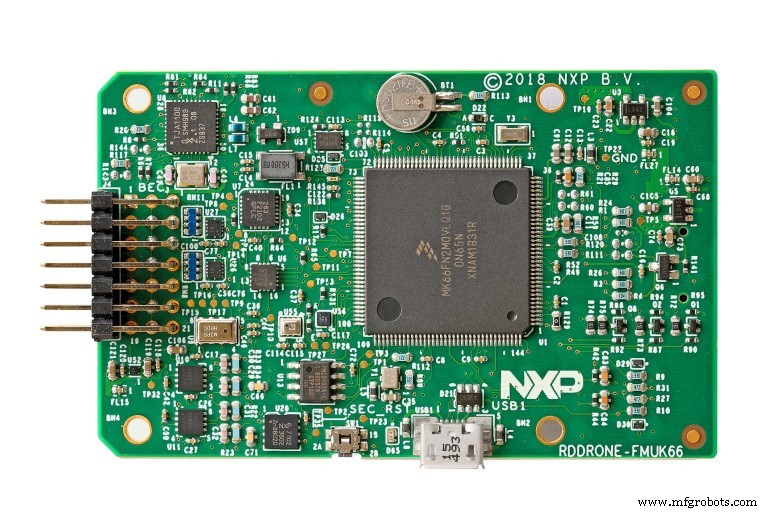
Figuur 6. RDDRONE-FMUK66 vliegeenheid (Bron:NXP)
>> Dit artikel is oorspronkelijk gepubliceerd op onze zustersite, Power Electronics News.
Verwante inhoud:
- Ontwerpen van elektronische snelheidsregelaars voor drones
- Drones blijven doorgaan met oplossingen voor draadloos opladen
- LiDAR-sensor ondersteunt beeldvorming met hoge resolutie in UAV's
- Ontwikkelkits bieden platforms voor ontwerpen voor digitale voeding en motorbesturing
- Motorbesturingen ontwerpen voor robotsystemen
- Sensorfusie biedt meerdere voordelen
Abonneer u voor meer Embedded op de wekelijkse e-mailnieuwsbrief van Embedded.
Ingebed
- Toelatende en interlockcircuits
- Motorbesturingscircuits
- Renesas breidt microcontroller-opties voor servobesturing in industriële robots uit
- Motorbesturingen ontwerpen voor robotsystemen
- Motorcontroller integreert Arm Cortex-M0 core
- Kwaliteitscontrole is de eerste stap naar motorbetrouwbaarheid
- Spanningsbeheersing bij webverwerking – belangrijkste componenten
- Geïntegreerde VSD-compressoren:8 belangrijke voordelen
- Wat bepaalt de snelheid van een hydraulische motor
- Hoe regel je de snelheid van een hydraulische motor?
- Wat bepaalt de snelheid van een hydraulische motor?