


Snelheidsregeling van DC-motor - methoden voor spannings-, reostatische en fluxregeling
Toerentalregelingsmethoden van gelijkstroommotoren – spannings-, reostatische en fluxregeling van serie- en shunt-gelijkstroommotoren
Een gelijkstroommotor wordt gebruikt om de gelijkstroom (DC) elektrisch vermogen om te zetten in mechanisch vermogen op basis van de krachten die worden geproduceerd door magnetische velden. De output van de motor is mechanisch vermogen in termen van rotatie (snelheid) van de as.
Volgens de toepassingen moeten we de snelheid van de motor wijzigen. Bewuste verandering van snelheid staat dus bekend als snelheidsregeling van de motor.
De term snelheidsregeling verschilt van de snelheidsregeling. De snelheidsregeling betekent dat, om een assnelheid constant te houden tegen de verandering in belasting.
- Relate Post: DC-machine – constructie, werking, typen en toepassingen
EMF-vergelijking van een gelijkstroommotor
de EMF-vergelijking van een gelijkstroommotor wordt hieronder gegeven:
Eb =PΦNZ / 60A
Waar;
- P =Aantal polen
- Ф =Flux per pool
- N =Motortoerental (RPM)
- Z =Aantal geleiders
- A =Aantal parallelle paden
Als de motor eenmaal is ontworpen, kunnen het aantal polen (P), het aantal geleiders (Z) en het aantal parallelle paden (A) niet meer veranderen. Dit zijn dus vaste hoeveelheden.
Eb ∝ ΦN
Eb =kΦN
Waarbij k =Proportionaliteitsconstante
Voor DC-motoren wordt de EMF ook gedefinieerd als;
Eb =V – Ikeen Ra
Waar;
- V =Voedingsspanning
- Ikeen =Ankerstroom
- Ra =Ankerweerstand
Vergelijk nu beide vergelijkingen;
kΦN =V – Ia Ra
k =N =V – Ia Ra / kΦ
Uit de bovenstaande vergelijking is de snelheid van de motor afhankelijk van de voedingsspanning (V), Flux (Φ) en de ankerweerstand (Ra ).
Daarom kan de snelheid van een DC-motor worden gevarieerd, gewijzigd en gecontroleerd door te veranderen;
- Aansluitspanning "V" (ook bekend als Applied Voltage Control Method ).
- Externe weerstand met ankerweerstand Ra (AKA Reostatische controlemethode ).
- Flux per pool Φ (ook bekend als Flux Control Method ).
Hier worden klemspanning en ankerweerstand geassocieerd met het ankercircuit en wordt de flux per pool geassocieerd met het veldcircuit.
De snelheidsregelingsmethoden van een gelijkstroommotor worden dus geclassificeerd als;
- Besturingsmethode voor anker
- Veldcontrolemethode
Nu bespreken we hoe we deze methoden kunnen implementeren voor DC-series, shunt- en samengestelde motoren.
- Gerelateerde post: servomotor – typen, constructie, werking, besturing en toepassingen
Snelheidsregeling van DC-serie motor
Snelheidsregeling van motoren uit de DC-serie wordt gedaan door de methoden voor ankerregeling en veldregeling.
Besturingsmethode voor ankerweerstand voor motor uit de DC-serie
Bij deze methode wordt een variabele weerstand of regelweerstand in serie geschakeld met de ankerweerstand. Het schakelschema van deze methode is zoals weergegeven in de onderstaande afbeelding.
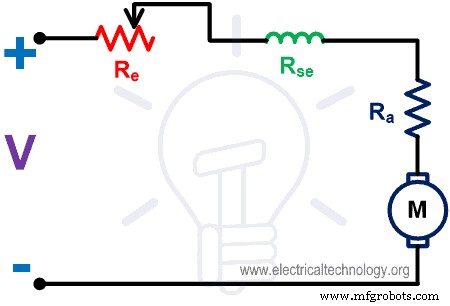
Fig-1
In seriemotor is de ankerwikkeling in serie geschakeld met de veldwikkeling. Daarom zijn ankerstroom en veldstroom hetzelfde.
Door de ankerweerstand te variëren, variëren de ankerstroom en -spanning. Als de waarde van de externe weerstand toeneemt, wordt de spanning over het anker en de stroom van de ankerwikkeling verminderd. En de snelheid zal worden verlaagd.
Bij deze methode neemt de snelheid van de motor alleen af vanaf het snelheidsniveau wanneer er geen externe weerstand is aangesloten. De snelheid van een motor kan vanaf dit niveau niet toenemen.
Hier is de externe weerstand in serie geschakeld met het anker. Daarom zal de vollaststroom door de externe weerstand vloeien. Het is dus ontworpen om de volledige belastingsstroom continu te dragen.
De snelheid-stroomkarakteristiek is zoals weergegeven in de onderstaande afbeelding.
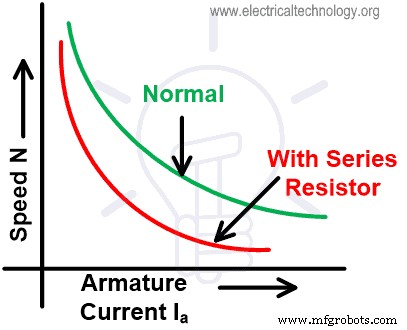
Fig-2
- Gerelateerde post:Borstelloze DC-motor (BLDC) - constructie, werkingsprincipe en toepassingen
Besturingsmethode ankerspanning voor DC-serie motor
Bij deze methode wordt de snelheid geregeld door de ankerspanning (voedingsspanning) te variëren. Bij deze methode is een aparte variabele spanningsbron vereist.
Het toerental van een motor is evenredig met de voedingsspanning. Dus als de spanning toeneemt, zal de snelheid van de motor toenemen en vice versa.
Over het algemeen wordt deze methode niet gebruikt. Omdat de kosten van een variabele voeding erg hoog zijn. Daarom wordt deze methode zelden gebruikt voor snelheidsregeling.
Veldbesturingsmethode voor DC-serie motor
De veldstroom is evenredig met de flux. Bij deze methode wordt de snelheid geregeld door de veldstroom te regelen. Er zijn twee manieren om de veldstroom te regelen;
- Besturing veldomleider
- Tikte op Filed Control
Besturing gearchiveerde omleiding
Bij deze methode wordt de serieveldwikkeling parallel geschakeld met de omleider. De omleider is niets anders dan een variabele weerstand. Sommige delen van de veldstroom gaan door de omleider.
Van de snelheidsvergelijking van een motor is de flux omgekeerd evenredig met de snelheid van de motor. Dus als de flux afneemt, neemt de snelheid toe.
Minder de waarde van de omleiderweerstand minus de veldstroom en minder de flux die in de motor wordt geproduceerd. Daarom neemt de snelheid van de motor toe.
Bij deze methode kan de snelheid worden verhoogd ten opzichte van de normale snelheid. Het schakelschema van deze methode is zoals weergegeven in de onderstaande afbeelding.
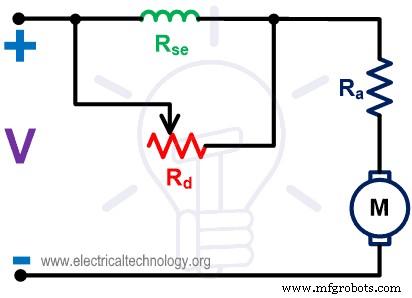
Fig-3
- Gerelateerde post:stappenmotor - typen, constructie, bediening en toepassingen
Getikt veldbesturingselement
Er wordt op de veldwikkeling getikt om het aantal windingen in de wikkeling te kiezen. Door het aftappen te kiezen, wordt de veldstroom geregeld.
Voor een groter aantal windingen is de geveerde stroom meer en de snelheid minder. Voor een kleiner aantal windingen is de gevijlde stroom minder en sneller als er meer is.
Daarom kan bij deze methode de snelheid worden geregeld door het juiste tikken op de gevijlde wikkeling te kiezen.
Deze methode wordt gebruikt in elektrische tractie voor de snelheidsregeling van de aandrijving. Het schakelschema van deze methode is zoals weergegeven in de onderstaande afbeelding.
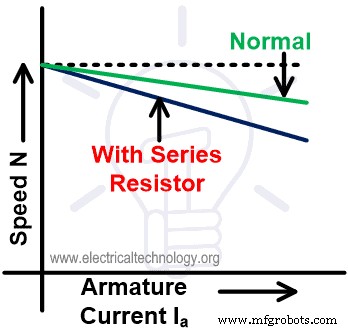
Fig-4
Snelheidsregeling van DC-shuntmotor
Methoden voor snelheidsregeling voor DC Shunt-motor zijn vergelijkbaar met de DC-serie motor. Ankerbesturing en veldbesturingsmethoden zijn ook van toepassing op de DC-shuntmotor.
- Verwante post: berekening van kabelafmetingen voor LT- en HT-motoren
Besturingsmethode ankerweerstand voor DC-shuntmotor
Bij deze methode wordt externe weerstand toegevoegd aan het armatuurcircuit. De veldwikkeling is direct verbonden met de voeding. Daarom blijft de veldstroom hetzelfde. En ook zal de flux hetzelfde blijven als de externe weerstand varieert.
Van de snelheidsvergelijking is de ankerstroom evenredig met de snelheid van de motor. Als de waarde van de externe weerstand toeneemt, wordt de ankerstroom verlaagd. Daarom wordt de snelheid verlaagd.
Deze methode wordt gebruikt om de snelheid onder de normale waarde te regelen. De snelheid kan niet meer toenemen dan de normale snelheid. Het aansluitschema van deze methode is zoals weergegeven in de onderstaande afbeelding.
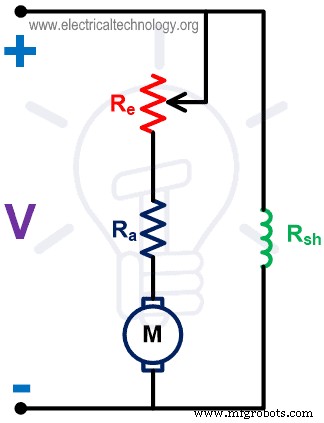
Fig-5
De snelheid-stroomkarakteristiek is zoals weergegeven in de onderstaande afbeelding.
Fig-6
- Gerelateerde post:eenfasige inductiemotor - constructie, werking, typen en toepassingen
Veldbesturingsmethode voor DC-shuntmotor
In een DC-shuntmotor is de variabele weerstand in serie geschakeld met de shuntveldwikkeling. Door deze variabele weerstand kan de veldstroom worden gevarieerd. Deze variabele weerstand wordt ook wel Field Regulator genoemd.
Het aansluitschema van deze methode is zoals weergegeven in de onderstaande afbeelding.
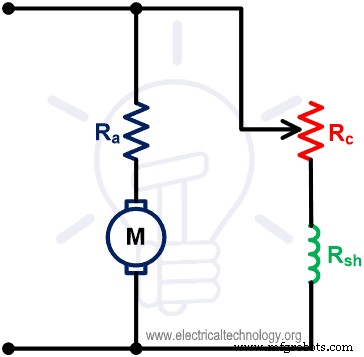
Fig-7
Uit het bovenstaande schakelschema is de vergelijking van de shuntveldstroom;
Door de waarde van weerstand te verhogen, neemt de veldstroom af en daarmee de flux. Uit de snelheidsvergelijking is de flux omgekeerd evenredig met de snelheid. Dus de snelheid neemt toe naarmate de flux afneemt.
Deze methode is dus toepasbaar om de snelheid boven de normale snelheid te regelen. De snelheid kan bij deze methode niet lager zijn dan de normale snelheid. De snelheid-stroomkarakteristiek van deze methode is zoals weergegeven in de onderstaande afbeelding.
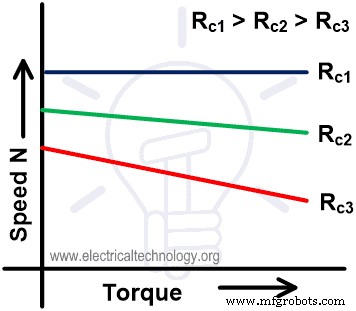
Fig-8
- Gerelateerde post:driefasige inductiemotor - constructie, werking, typen en toepassingen
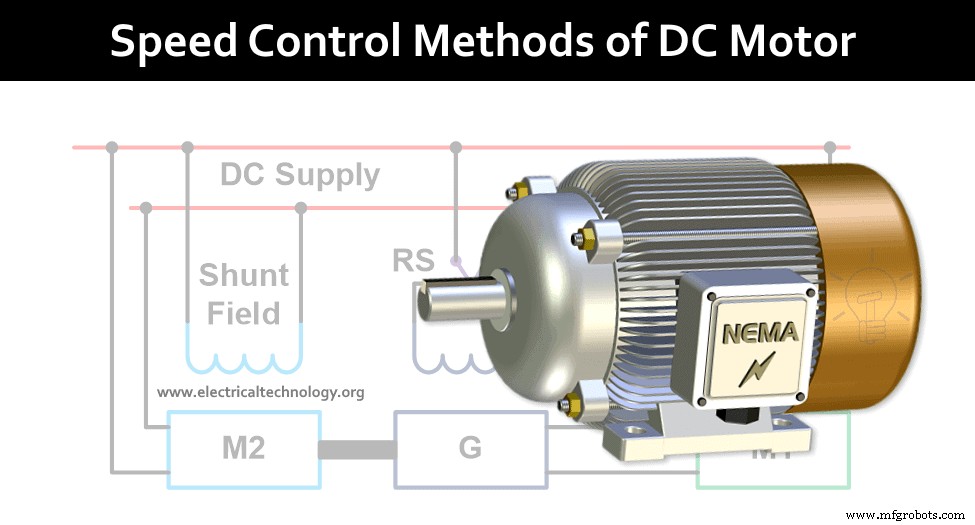
Besturingsmethode voor ankerspanning voor DC-shuntmotor
Bij deze methode wordt de veldwikkeling geleverd door de constante aanvoer. Maar de ankerwikkeling wordt gevoed door een aparte variabele DC-bron.
Deze methode staat ook bekend als de Ward-Leonard-methode . Het aansluitschema van deze methode is zoals weergegeven in de onderstaande afbeelding. 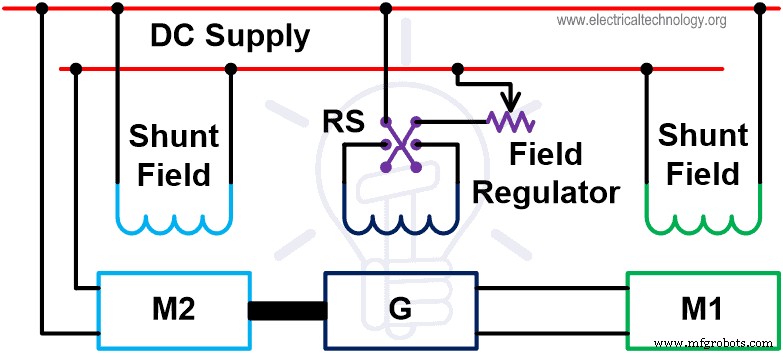
Fig-9
Vanuit het bovenstaande diagram regelen we de snelheid van motor M1. Deze motor werd aangedreven door de generator G.
De shuntveldwikkeling is verbonden met de DC-voeding. De generator G wordt aangedreven door de motor M2. De motor M2 is een motor met constant toerental en wordt gevoed door de DC-voeding.
De motor M1 begint te draaien wanneer de uitgangsspanning van generator G naar de motor wordt gevoerd. De snelheid van een motor kan worden geregeld door de uitgangsspanning van generator G te regelen.
De geveerde regelaar is over de generator aangesloten met een DC-voedingslijn om de geveerde excitatie te regelen.
Door de bekrachtigingsspanning van de generator te regelen, wordt de uitgangsspanning van de generator geregeld. En deze spanning zal de snelheid van motor M1 regelen.
De schakelaar RS is een omgekeerde schakelaar. Deze schakelaar wordt gebruikt om de terminal van veldexcitatie te schakelen. Hierdoor zal de bekrachtigingsstroom omkeren en de tegenovergestelde spanning genereren.
Dus deze tegengestelde spanning zal de snelheid van motor M1 omkeren. Door deze methode kan de motor dus in beide richtingen draaien. En de snelheid kan aan beide zijden van de draairichting worden geregeld.
- Gerelateerde post:wat is motorefficiëntie en hoe kan deze worden verbeterd?
Voor- en nadelen van de Ward Leonard-methode
Voordelen van de Ward Leonard-methode
De voordelen van deze methode worden hieronder samengevat;
- De snelheid van een motor kan over een groot bereik worden geregeld.
- De werking van de motor is erg soepel.
- De snelheidsregeling van de motor is goed.
- Een motor kan draaien met een uniforme versnelling.
- Het heeft een inherent breekvermogen.
- Eenvoudig om te draaien van de draairichting en snelheid kan in beide richtingen worden geregeld.
Nadelen van de Ward Leonard-methode
De nadelen van deze methode worden hieronder samengevat;
- Er zijn twee extra machines nodig (motor-generatorset) met hetzelfde vermogen als de hoofdmotor. Daarom zijn de totale kosten van dit arrangement erg hoog.
- Het produceert meer geluid.
- Veel onderhoud vereist.
- Dit arrangement heeft meer ruimte nodig om te installeren.
- Algehele efficiëntie is laag als de motor gedurende een lange periode onder lichte belasting draait.
Toepassing van de Ward Leonard-methode
Deze methode wordt gebruikt wanneer de motor over een breed snelheidsbereik moet worden bestuurd. De toepassing van de motor is erg snelheidsgevoelig, in deze toestand is deze methode erg handig.
Deze methode wordt gebruikt in de applicatie zoals; kranen, graafmachine, lift, mijntakels, papiermachine, staalwalserijen, enz.
Industriële technologie
- Signaalkoppeling
- Toelatende en interlockcircuits
- Motorbesturingscircuits
- Softwaresuite vereenvoudigt ontwerpen voor motorbesturing
- Kwaliteitscontrole is de eerste stap naar motorbetrouwbaarheid
- Marktgroei voor laagspanningsregeling
- Motorkabels voor aandrijvingen met variabele snelheid
- Soorten kwaliteitscontrolemethoden die worden gebruikt voor zandgietonderdelen
- Wat bepaalt de snelheid van een hydraulische motor
- Hoe regel je de snelheid van een hydraulische motor?
- Wat bepaalt de snelheid van een hydraulische motor?