


Arduino IoT-robotarm
Componenten en benodigdheden
 |
| × | 1 | |||
| × | 5 |
Apps en online services
 |
| |||
 |
|
Over dit project
Dit is mijn eerste robotarm met de volgende kenmerken:
- 5DOF-robot, eigenlijk 4 als we de grijper uitsluiten
- het brein is een Arduino Yun met IoT-mogelijkheden
- de bedieningsinterface is ingebouwd in de Blynk-app
- voorwaartse kinematica zijn geïmplementeerd in Matlab met behulp van de Robotics Toolbox
- een nieuwe bibliotheek die ik heb geschreven die een vloeiende beweging realiseert
Ik ben erg blij met het resultaat. Daarom wil ik graag mijn ervaring met u delen en hoe u deze kunt bouwen.
Componenten en materialen
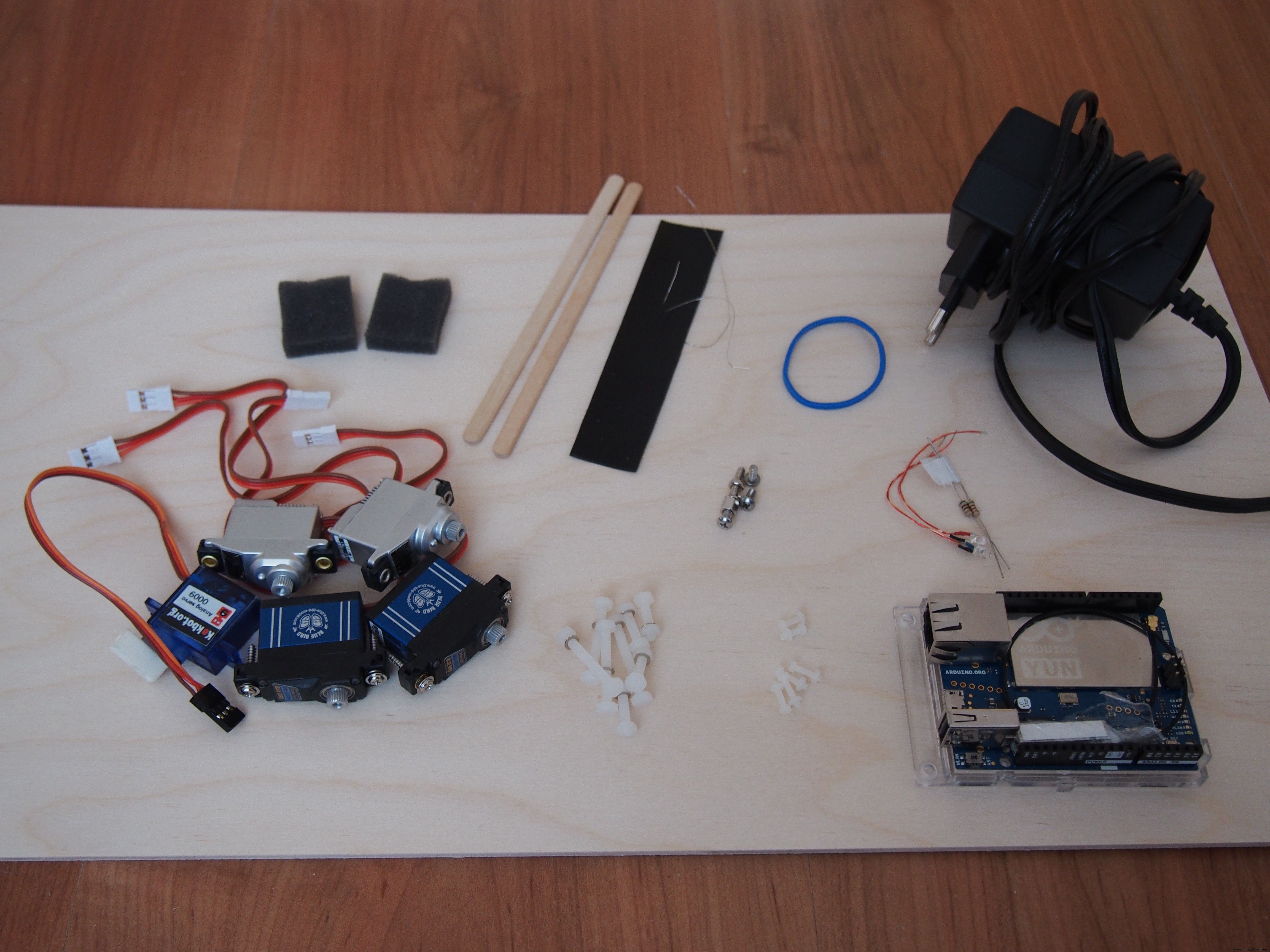
Om de robot te bouwen heb je nodig:
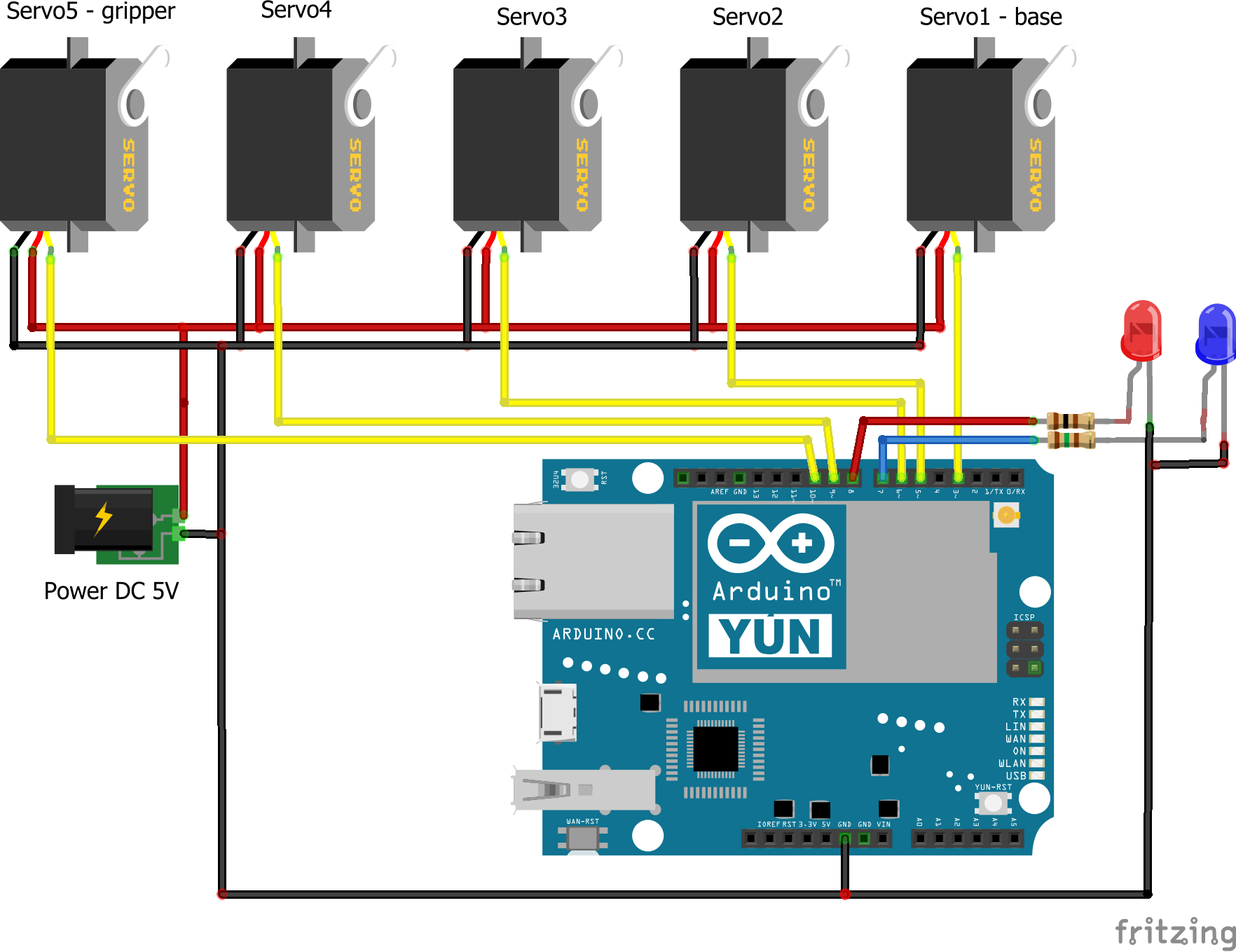
- 1 x Arduino Yun (of een ander Arduino-bord)
- 5 x servomotoren
- 1 x 5V-oplader, min. 2,5 A
- 2 x Led's
- 2 x weerstanden, respectievelijk 100 ohm (voor rode led) en 150 ohm (voor blauwe led),
- 2 x houten mengstaafjes
- 1 x metalen draad (of vergelijkbaar)
- 1 x plastic vel (ik heb het uit een douchegelfles gehaald)
- 1 x elastiekje
- 2 x kleine sponsjes (zie linker bovenhoek)
- 9 x plastic M3-schroeven
- 6 x plastic M2.5 schroeven
- 1 x houten plaat 3 mm (30 cm x 50 cm zou meer dan voldoende moeten zijn)
- 1 x houtlijm
- tijd om te coderen
De robot bouwen
Om de robot te bouwen, begint u met het meten van de grootte van de servo's en het controleren van het koppel van de servo's. Dit geeft je een indicatie over de grootte van de armen en uiteindelijk de grootte van de robot. In mijn geval bestelde ik 2 verschillende micro-servo's met hoog koppel:eerste paar en tweede paar. Deze kunnen tot 140 graden reizen, ook al zijn ze gespecificeerd om 120 graden te reizen. Ik adviseer echter om 180 graden servo's te kopen om meer reishoek te hebben.
Voor de grijper is er geen servo met hoog koppel nodig. De goedkoopste micro-servo op ebay kan het werk doen.
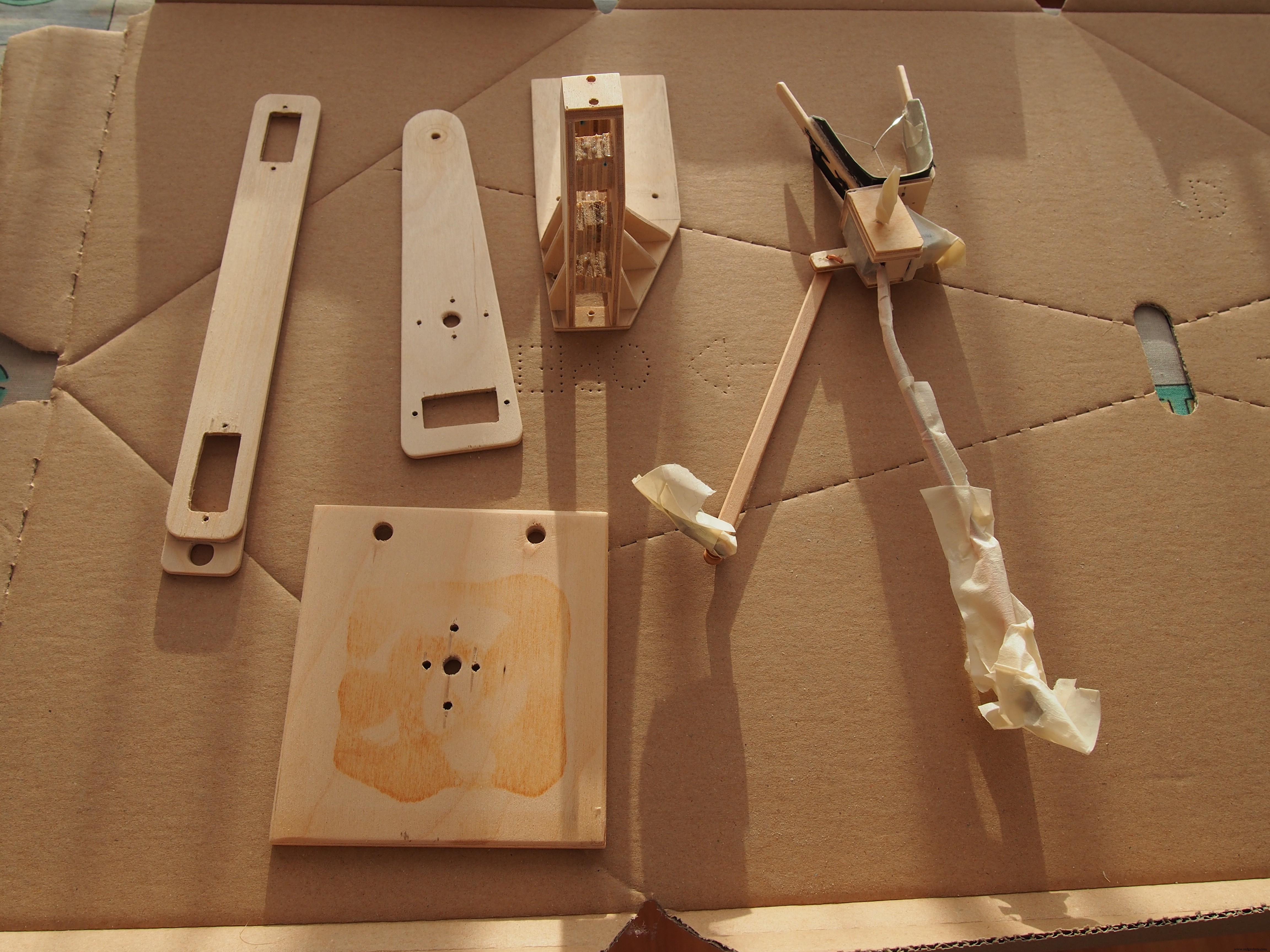
Begin met het knippen van de armen zoals je op foto 1 ziet. Hier kun je creatief zijn, er is geen vast ontwerp, je kunt je eigen ontwerp bedenken. Bouw vervolgens de grijper op met een doormidden gesneden mengstaaf en het plastic vel als veerretour. Met draden die aan de binnenkant zijn aangesloten, kunt u de grijper sluiten en openen. Voor mijn robot heb ik één M3-schroef gebruikt om de grijper te laten draaien. Het draaien van de grijper wordt gedaan door een servo aan de andere kant van de arm om gewichtsbalans te verkrijgen. De kracht wordt overgebracht via een andere mengstok (zie Foto 2, bovenkant van de robot).
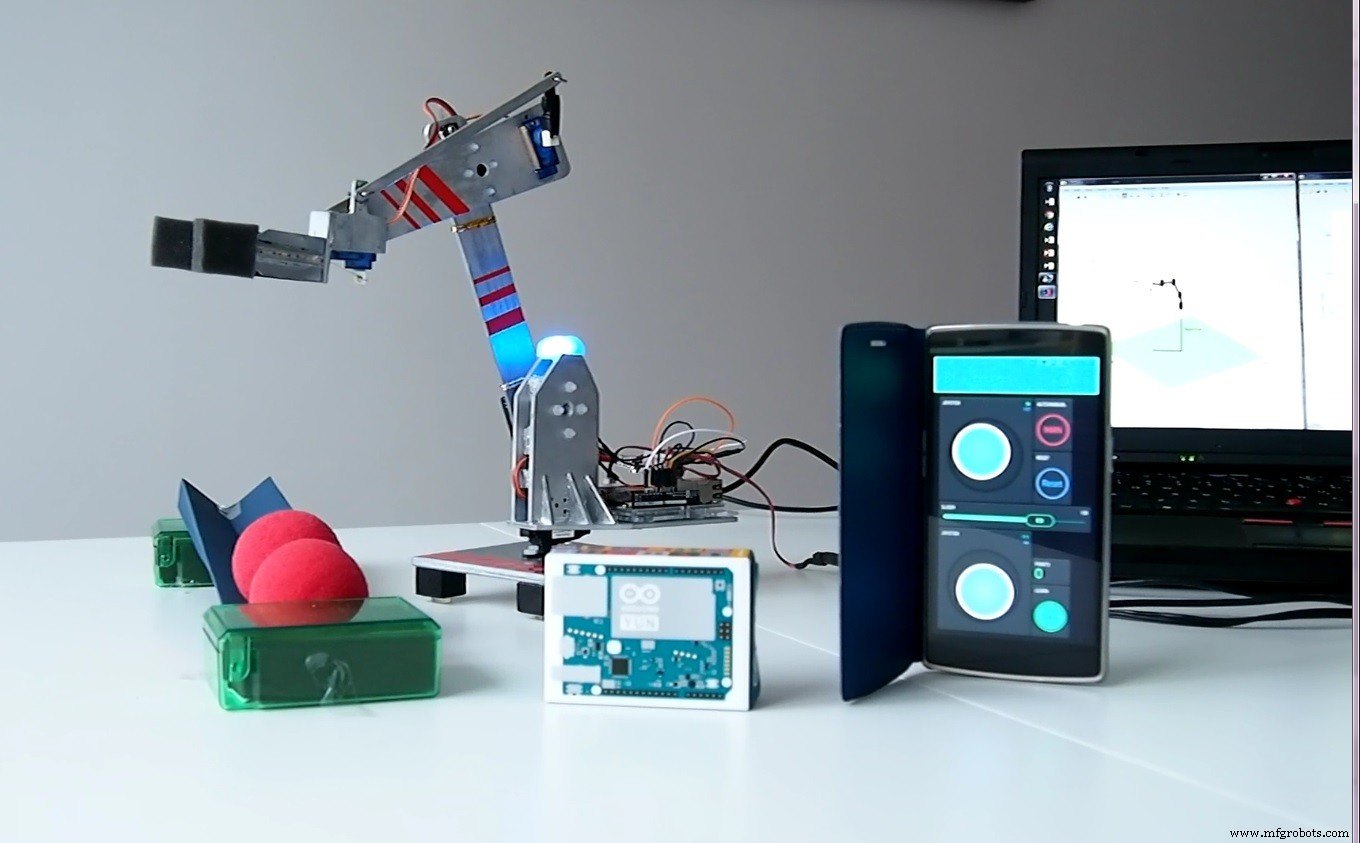
Bouw vervolgens de basis en de plaat met de basisservo en het Arduino Yun-bord (of een ander bord). Zet alles bij elkaar en je zou zoiets als in Foto 2 moeten hebben.
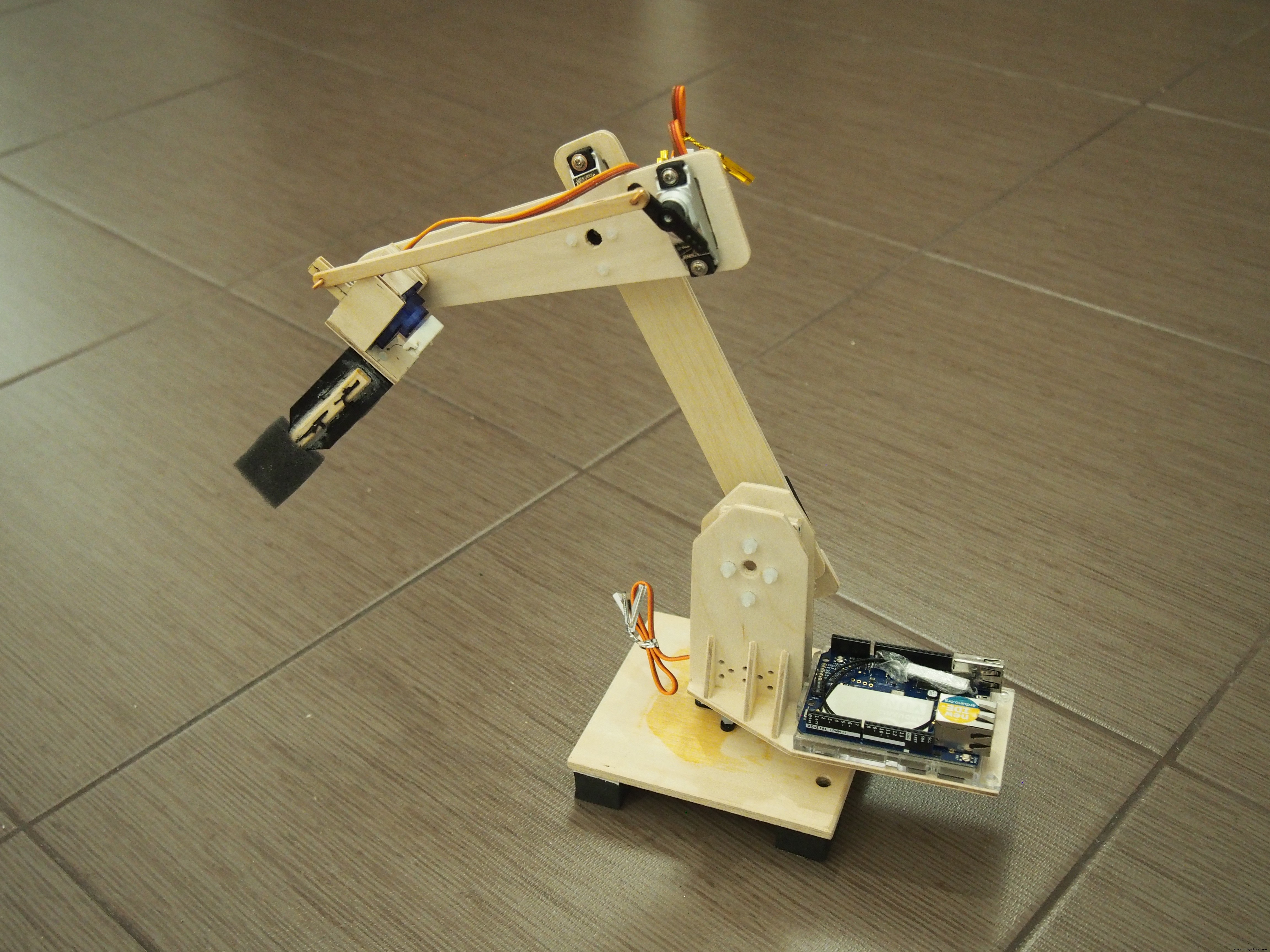
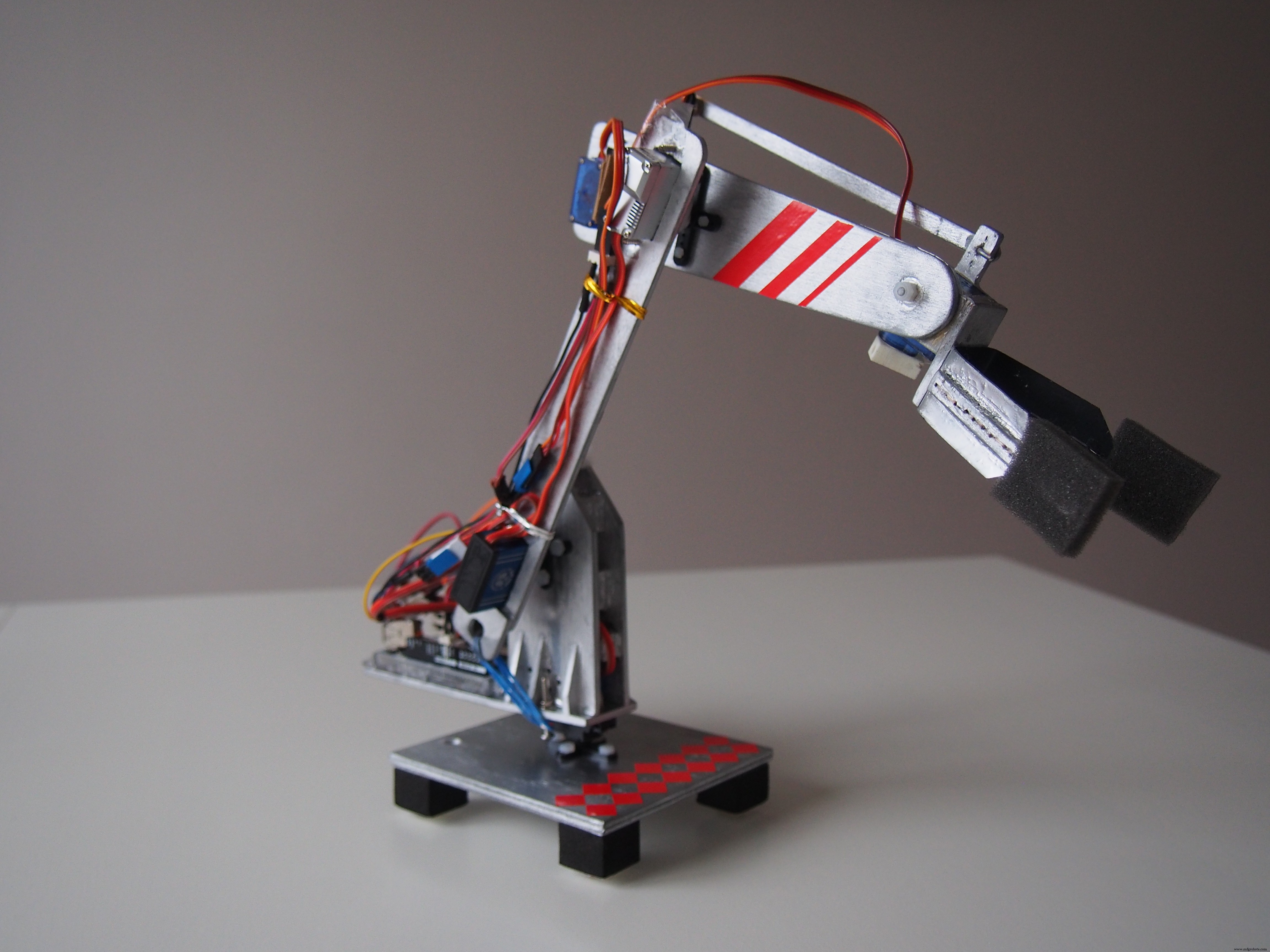
Als u een mooier ontwerp wilt, schuurt u de houten onderdelen en schildert u ze (zoals in foto 3) met de kleur van uw voorkeur. Voor mijn robot ging ik voor een zilveren kleur (om metaal na te bootsen) met rode strepen. Het eindresultaat wordt getoond in Foto 4.

Software
Voor de software ben ik begonnen met het maken van een interface in Blynk. Als je Blynk nog niet eerder hebt gebruikt, kijk dan op hun website hoe je dit moet doen. Moet heel gemakkelijk en ongecompliceerd zijn.
Opmerking: Als je geen bord hebt dat verbinding kan maken met internet, maak je geen zorgen, je kunt Blynk nog steeds gebruiken met een normaal bord, bijvoorbeeld Arduino Uno, via de USB-poort. Lees hier om dit te doen.
Laten we vervolgens naar Arduino IDE gaan en wat code schrijven. Voor uw gemak heb ik de code bijgevoegd, zodat u deze gewoon kunt gebruiken :) Om het uit te voeren, moet u het volgende doen:
- Configureer het Arduino Yun-bord.
- Installeer Blynk-bibliotheek in uw Arduino IDE door naar Sketch>Bibliotheek opnemen>Bibliotheken beheren te gaan, zoek naar Blynk en installeer het.
- Voeg de SimpleTimer-bibliotheek in een map met de naam SimpleTimer toe aan uw Arduino-bibliotheekmap, meestal Arduino\libraries\
- Voeg de MotionGenerator-bibliotheek toe die ik heb geschreven, in een map met de naam MotionGenerator aan de Arduino-bibliotheekmap
- Compileer en upload RobotArm_instructables.ino (Opmerking:vergeet niet uw Blynk-token bij te werken)
Opmerking: De MotionGenerator-bibliotheek is een analytische oplossing die u soepele, mooie overgangen van het ene punt naar het andere geeft. Het staat beperkingen op de maximale snelheid en acceleratie toe.

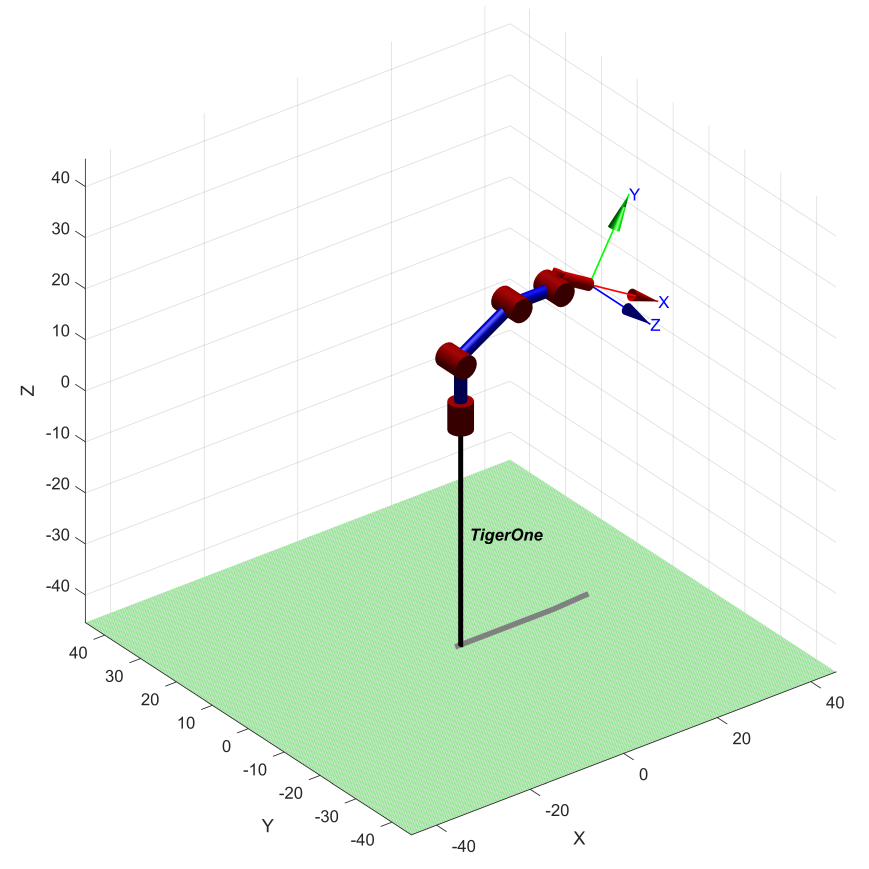
Optioneel (voorwaartse kinematica, zie Foto 3 hierboven): Hiervoor heb je Matlab en Robotics Toolbox nodig. Als je deze allemaal hebt ingesteld, zorg er dan voor dat je robot is aangesloten op Blynk en is aangesloten op de USB-poort van je computer. Matlab verzamelt informatie van de Arduino via de seriële communicatie. Zorg er dus voor dat u de juiste COM-poort invult in de MainScrip.m. Voer tot slot gewoon MainScrip.m uit.
Opmerking:de robotkinematica is voor mijn eigen robot. Voor uw robot kunnen de afmetingen anders zijn (voel u vrij om aan te passen in robotKinematicsFcn.m).
Code
- Bronbestanden
BronbestandenC/C++
Zip-archief met de broncodebestanden.Geen voorbeeld (alleen downloaden).
Schema's
Productieproces
- Makerarm:een mega-coole robotarm voor makers
- Arduino-bord richt zich op industrieel IoT
- Robotische arm:hoe wordt het gemaakt?
- Hartslagmeter met IoT
- Ioed gebruiken om een robotarm op afstand te bedienen
- Arduino 3D-geprinte robotarm
- Nunchuk-gestuurde robotarm (met Arduino)
- Eenvoudige en slimme robotarm met Arduino
- Littlearm 2C:bouw een 3D-geprinte Arduino-robotarm
- Azure IoT-zwembad
- De industriële robotarm - een productieboom