Over dit project
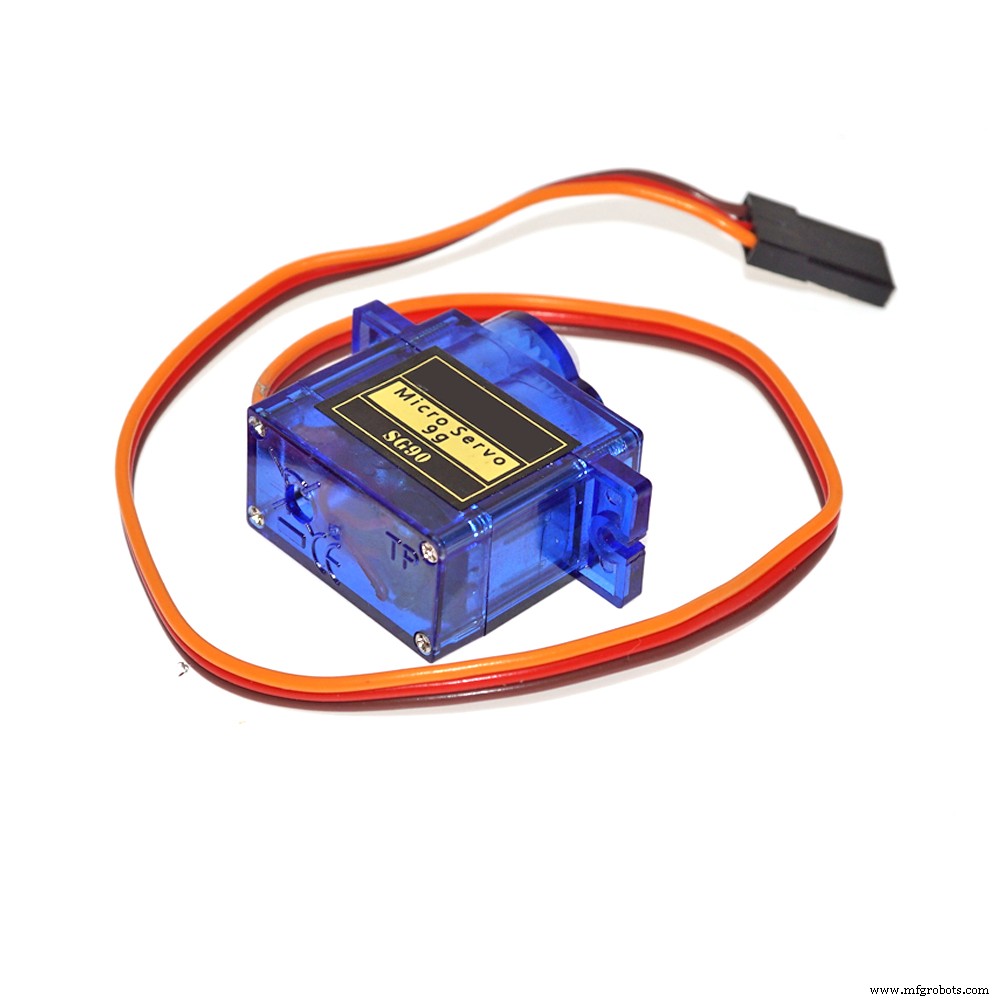
Dit project gebruikt 4 stuks. goedkope SSG 90-servomotoren die worden aangedreven door het Arduino-bord. U kunt.stl-bestanden voor 3D-afdrukken downloaden via de onderstaande link, of rechtstreeks naar Thingiverse-web,
https://www.thingiverse.com/thing:1015238
waar je meer gedetailleerde instructies kunt vinden voor het maken van deze robotarm.
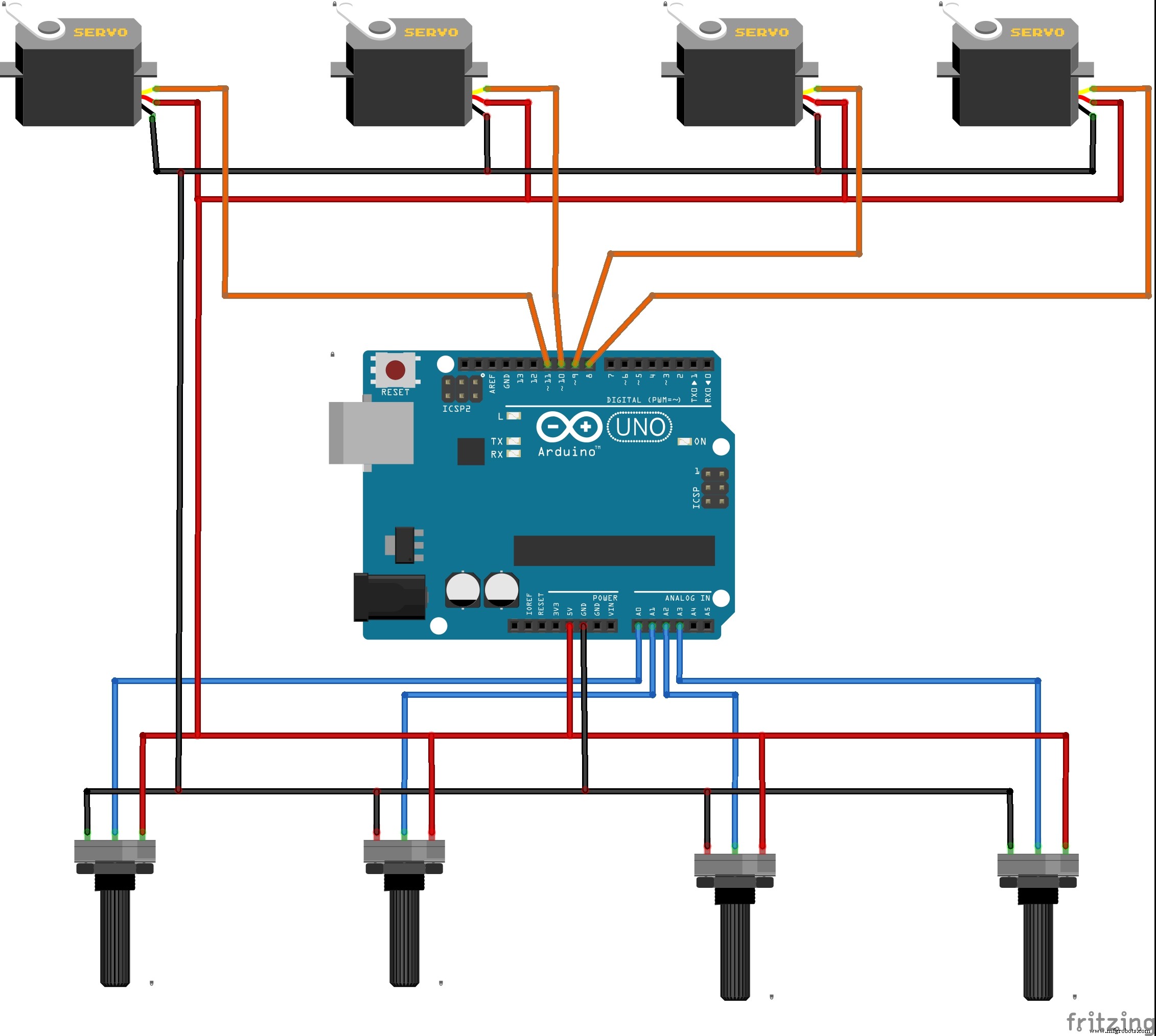
Zoals eerder vermeld, worden de servomotoren aangedreven vanaf het Arduino-bord. Voor dit doel heb ik ook een eenvoudige code geschreven zodat elke servo wordt bestuurd door een geschikte potentiometer. Na een kleine oefening wordt het gebruik met potentiometers heel gemakkelijk en interessant, zoals te zien is op de video.
In de toekomst zal ik proberen de code uit te breiden met de mogelijkheid om bepaalde bewegingen van servomotoren vast te leggen en automatisch uit te voeren, waardoor een complete industriële robot ontstaat.
Het schema is te zien in de onderstaande afbeelding.
Code
codeArduino
#include Servo mijnservo; // maak een servo-object om een servoServo myservo1;Servo myservo2;Servo myservo3;int potpin =0;// analoge pin gebruikt om de potentiometerint aan te sluiten potpin1 =1;int potpin2 =2;int potpin3 =3;int val; // variabele om de waarde te lezen van de analoge pinint val1;int val2;int val3;void setup() { myservo.attach(8); // bevestigt de servo op pin 8 aan het servo-object myservo.attach (9); mijnservo.attach(10); myservo.attach(11);}void loop() {val =analogRead(potpin); // leest de waarde van de potentiometer (waarde tussen 0 en 1023) val =map (val, 0, 1023, 0, 180); // schaal het om het te gebruiken met de servo (waarde tussen 0 en 180) myservo.write(val); // stelt de servopositie in volgens de geschaalde waardevertraging (15); // wacht op de servo om daar te komen val1 =analogRead (potpin1); val1 =kaart (val1, 0, 1023, 0, 180); mijnservo1.write(val1); vertraging (15); val2 =analoog lezen (potpin2); val2 =kaart (val2, 0, 1023, 0, 180); mijnservo2.write(val2); vertraging (15); val3 =analoog lezen (potpin3); val2 =kaart (val3, 0, 1023, 0, 180); mijnservo3.write(val3); vertraging (15); }
Aangepaste onderdelen en behuizingen
eezybotarm_uVD6bjbxQi.zip Schema's