


Een tijdelijke verbeterde spanningsregelaar met stabiliteits- en voedingsonderdrukkingsversterking
Abstract
In dit document wordt een zeer stabiele spanningsregelaar (VR) voorgesteld, die transiënte verbetering en overstroombeveiliging (OCP) integreert. Rekening houdend met de prestatie- en gebiedsvoordelen van laagspanningsapparaten, worden de meeste besturingsonderdelen van de voorgestelde VR geleverd door de gereguleerde uitgangsspanning, die een self-power-techniek (SPT) vormt met een boost van de voedingsonderdrukking (PSR). Bovendien worden de stabiliteit en transiënte respons verbeterd door dynamische belastingstechniek (DLT). Een ingebedde overstroom-feedbacklus wordt ook gebruikt om de gepresenteerde VR te beschermen tegen schade onder overbelastingssituaties. De voorgestelde VR is geïmplementeerd in een standaard 350 nm BCD-technologie, waarvan de resultaten aangeven dat de VR stabiel kan werken met een ingangsspanning van 5,5-30 V, een belastingsbereik van 0-30 m en een uitgangscondensator van 0,1-3,3 F. Een 2,98 μV/V lijnregeling en een 0,233 mV/mA belastingsregeling worden bereikt met een 40 mA stroombegrenzing. De PSR is beter dan − 64 dB tot 10 MHz met een 0,1 μF uitgangscondensator.
Inleiding
In moderne ontwerpen op nanometerschaal op een chip (SoC), vereisen verschillende subblokken meestal verschillende voedingsrails om een aantal specifieke functies te bereiken. Bovendien moet het hele SoC-systeem mogelijk onder een breed ingangsspanningsbereik werken en toch hoge prestaties leveren die niet worden beïnvloed door veranderende voedingscondities [1]. Een spanningsregelaar (VR) met een breed ingangsspanningsbereik, geïmplementeerd in technologie op nanometerschaal, kan dus een van de meest geschikte kandidaten zijn voor dit soort toepassingen. Vergeleken met zijn schakelende tegenhanger, zoals schakelende regelaar en laadpomp, heeft lineaire VR het voordeel van hoge precisie, laag uitgangsgeluid en compact formaat. De meeste lineaire VR's voeren hun spanningsregulerende functie uit met een enkele voedingsspanning, maar slechts enkelen kunnen de combinatie van een breed voedingsbereik, weinig ruis, snelle transiënten, hoge belastingscapaciteit en extra beveiligingsfuncties bereiken [2,3,4] .
Om een breed voedingsbereik te realiseren, is het gebruik van transistoren nodig die bestand zijn tegen hoogspanningsdruk. Dit soort transistors nemen echter meestal meer ruimte in beslag en presteren slechter in vergelijking met de standaardtransistoren. Twee van de bestaande oplossingen om het gebruik van hoogspanningstransistoren te verminderen zijn de preregulatormethode [5, 6] en de gestapelde laagspanningstransistorsmethode [7, 8]. De eerste gebruikt een extra voorregelaar om een interne voedingsspanning voor de kernregelaar te leveren. De laatste implementeert goed ontworpen gestapelde laagspanningstransistoren om de klemspanningen van transistoren binnen de technologische limiet te houden [7]. Deze methoden beperken echter de spanningsruimte. Dit artikel gebruikt de self-power-techniek (SPT) om een breed voedingsbereik te bereiken, wat betekent dat de meeste kernmodules in de regellus worden gevoed door de gereguleerde uitgangsspanning van de voorgestelde VR [9]. Zonder extra circuit kunnen de prestaties van VR worden verbeterd door SPT en ook het aantal hoogspanningsapparaten verminderen.
Door SPT te gebruiken, wordt de eerste versterkingstrap van de foutversterker (EA) geleverd door de gereguleerde uitgangsspanning van de voorgestelde VR. Door de tweede trap van EA zorgvuldig te ontwerpen, heeft de hoogfrequente ruis van de ingangsspanning weinig invloed op de uitgangsspanning van de EA. Verder wordt in dit artikel de N-type vermogenstransistorarchitectuur overgenomen. Daarom heeft de voorgestelde regelaar een hoge voedingsonderdrukking (PSR) en goede ruisprestaties [10,11,12,13,14,15].
Snelle transiënte respons is ook een belangrijke index om de prestaties van VR's te meten [16,17,18,19,20], wat meestal wordt bereikt door een extra versnellingslus toe te voegen [21]. In dit artikel wordt de transiënte verbetering gerealiseerd door dynamische belastingstechniek (DLT). Tijdens de tijdelijke responsprocedure introduceert DLT een extra stroom die overeenkomstig de belastingscondities wordt gewijzigd om als een dynamische belasting te werken, waardoor het over- en onderschrijden van de gereguleerde uitgangsspanning kan worden onderdrukt [9].
Met behulp van DLT wordt de lusstabiliteit binnen een breed belastingsbereik versterkt, omdat de extra belastingsstroom de variatie van de niet-dominante poolpositie kan verminderen. Om de lus stabiel te maken, wordt miller-compensatie met nulweerstand ook gebruikt voor het genereren van een laagfrequente pool en een extra nul om de uitgangspool te compenseren. Bovendien introduceert een serie weerstanden met de uitgangscondensator nog een nul om de pool te compenseren die wordt gegenereerd door de parasitaire poortcapaciteit van de vermogenstransistor [6, 9, 22, 23].
Ten slotte is een ingebouwde stroombegrenzingslus ontworpen om schade door overstroom te voorkomen en de betrouwbaarheid van de voorgestelde VR te verbeteren [9, 24,25,26,27].
Dit document is als volgt opgebouwd. Het principe en het mechanisme van de voorgestelde VR worden geïllustreerd in de sectie "Methode", inclusief het circuit voor overstroombeveiliging (OCP), het DLT- en transiëntverbeteringscircuit, de stabiliteitsverhogende methode en de PSR-analyse. De prestatieresultaten en vergelijkingen met andere gerelateerde gepubliceerde literatuur worden weergegeven in de sectie "Resultaten en discussie". De sectie "Conclusie" trekt de conclusie van de voorgestelde VR.
Methode
Het gedetailleerde circuit van de voorgestelde VR wordt getoond in Fig. 1. Standaard laagspannings MOS-transistoren, hoogspanningstransistoren, BJT's, N-type depletie LDMOS-transistors (laterally diffuse MOS) en diodes worden Mn , HVn , Vn , DNn , en Dn , respectievelijk in de figuur, waar n is het volgnummer van het betreffende apparaat.

Het gedetailleerde circuit van de voorgestelde VR
De voorgestelde VR omvat hoofdzakelijk vijf submodules:huidige bias, OCP, DLT, EA en eindtrap. Het stroomvoorspanningscircuit levert voorspanningsstroom voor het hele regelsysteem [12, 14]. De referentiespanning kan op veel verschillende manieren worden gegenereerd [1], en de gedetailleerde schakeling wordt hier niet getoond. Een ingebouwde stroombegrenzingslus functioneert als een OCP-circuit om de belastingsstroom te beperken tot een vooraf ingestelde waarde. Het transiënte verbeteringscircuit, dat is geïmplementeerd door DLT, bereikt de overshoot en onderschrijding onderdrukking door adaptief de belastingsstroom te wijzigen tijdens transiënte procedures. De regellus met negatieve feedback wordt gevormd door EA en de uitgangsvermogenstrap om de uitgangsspanning aan te passen. Ervan uitgaande dat de uitgangsspanning V UIT en dus de terugkoppelspanning V FB lager was dan de gewenste waarde, zou de poortspanning van vermogenstransistor DN1 worden opgetrokken met behulp van de regellus om de uitgangsspanning te verhogen, en vice versa. Ten slotte kan de uitgangsspanning stabiliseren op
$$ {V}_{\mathrm{OUT}}\circa {V}_1={V}_{\mathrm{REF}}\left({R}_{\mathrm{f}1}+{R} _{\mathrm{f}2}\right)/{R}_{\mathrm{f}2} $$ (1)In figuur 1 kan worden opgemerkt dat de uitgangsspanning van de voorgestelde VR ook de eerste versterkingstrap van EA aandrijft, die SPT wordt genoemd. Met deze power multiplexing-techniek kunnen de meeste apparaten in de regellus worden geïmplementeerd door laagspanningsapparaten. In vergelijking met zijn hoogspannings-tegenhangers, hebben laagspanningsapparaten hogere prestaties, lagere kosten en een kleiner gebied, waardoor de voorgestelde regellus veel gemakkelijker een goed regelvermogen bereikt. Wat betreft de tweede fase van EA, Q3 en Q4 worden toegevoegd om de grondtoevoerrail op te tillen, die is aangenomen om de afvoer-bronspanning van M7, VDS_M7 te beperken . Met andere woorden, Q3 en Q4 kunnen voorkomen dat M7 een hoge spanningsdruk krijgt.
Voor de eenvoud wordt de vereenvoudigde schakeling gebruikt om de innovatie-ideeën in de daaropvolgende analyse te illustreren.
Voorgesteld OCP-circuit
Figuur 2 toont het voorgestelde OCP-circuit. De voorgestelde stroombegrenzingslus kan de bedrijfsmodus automatisch wijzigen op basis van verschillende belastingsomstandigheden. De maximale stroom van de voorgestelde VR kan worden beperkt door de poortspanning van de vermogenstransistor te verlagen wanneer overbelasting optreedt.

Principe van voorgestelde OCP
Het mechanisme van de voorgestelde OCP is als volgt. Bemonsteringstransistor DN2 neemt proportioneel de stroom waar die door DN1 vloeit, die ongeveer gelijk is aan de belastingsstroom I Laden , waardoor de spanning over R . daalt S1 , V RS1 , weerspiegelen het belastingsstroomniveau. Eenmaal V RS1 de inschakelspanning van QS1, HV8 en HV9 bereikt, zal een stroomspiegel vormen om een stroom uit de tweede fase van EA te omzeilen. Vervolgens kan de poortspanning van DN1 worden verlaagd om de belastingsstroom te beperken tot een vooraf ingestelde waarde, die kan worden uitgedrukt als
$$ {I}_{\mathrm{Load}}\le N\times \left({V}_{EB\left(\mathrm{QS}1\right)}/{R}_{S1}\right ) $$ (2)waar N is de verhouding van de groottefactor van DN1 aan DN2. Het doel van Q5 en HV6 is om een juiste voorspanning aan HV7 te leveren en zo QS1 te beschermen tegen overspanning.
Er is een ingebouwde negatieve feedbacklus in de voorgestelde OCP. De lusversterking T en de dominante pool p dominant van deze stroombegrenzingslus kan worden gegeven door,
$$ T={g}_{m\_\mathrm{DN}2}{R}_{S1}{g}_{m\_\mathrm{QS}1}{R}_{\mathrm{gate }\_\mathrm{OC}} $$ (3) $$ {p}_{\mathrm{dominant}}=1/\left({R}_{\mathrm{gate}\_\mathrm{OC} }{C}_{\mathrm{gate}}\right) $$ (4)waar g m_DN2 en g m_QS1 zijn de transconductantie van respectievelijk DN2 en QS1. R gate_OC ≈ (g m_HV10 r o_HV10 r o_M10 ) || r o_M7 || r o_HV9 en C poort ≈ C gs_DN1 zijn de equivalente uitgangsweerstand en capaciteit bij het poortknooppunt van vermogenstransistor DN1 wanneer overstroom optreedt, respectievelijk. Wanneer de voorgestelde VR normaal werkt zonder overstroom, bevindt HV9 zich in het afsnijgebied en dus de equivalente uitgangsweerstand bij het poortknooppunt van DN1 genaamd R poort kan worden uitgedrukt als [(g m_HV10 r o_HV10 r o_M10 ) || r o_M7 ].
Voorgesteld DLT en Transient Enhancement Circuit
Afbeelding 3 toont het transiënte verbeteringscircuit met behulp van DLT. Aangezien de belastingsstroom evenredig is met Vgs_DN1 en omgekeerd evenredig met Vsg_M9, is de stroom die door M9 vloeit groter bij lichte belasting en bijna nul bij zware belasting. Daarom kan, naarmate de belastingsstroom toeneemt, een verminderde stroom in de totale uitgangsbelasting worden geïntroduceerd. Door deze methode kan dit circuit gelijk worden gemaakt aan een dynamische belasting, wat nuttig kan zijn voor zowel tijdelijke verbetering als stabiliteitsversterking van de regellus.

Het voorgestelde tijdelijke verbeteringscircuit
Het gedetailleerde werkingsprincipe van tijdelijke verbetering is als volgt. Als de belastingsstroom een plotselinge afname ervaart, zal de stroom die door vermogenstransistor DN1 vloeit niet onmiddellijk veranderen vanwege de beperkte mogelijkheid tot lusaanpassing en slew rate. Deze stroom, in Fig. 4a weergegeven als een geel pad, zal een doorschieten bij de uitgangsspanning veroorzaken en dus de spanningsval over R vergroten S2 en M9. Dan vloeit er een extra stroom door R S2 en M9, getoond in figuur 4a als een blauw pad, wordt gegenereerd aan de gereguleerde uitgang om de ongewenste gele padstroom op te heffen. Daarom wordt de piek in de uitgangsspanning effectief verminderd.

Voorbijgaande reactie van voorgestelde VR. een verandering van de belastingsstroom van zwaar naar licht. b stroomverandering licht-naar-zware belasting
Figuur 4b demonstreert het geval van stroomverandering van lichte naar zware belasting, waarbij een onderschrijding optreedt bij de gereguleerde uitgang en vervolgens de stroom die door R vloeit S2 en M9 neemt af. Dit kan gelijk staan aan het leveren van een verminderde stroombelasting, zodat de netto stroom die door de vermogenstransistor DN1 vloeit wordt verhoogd, en de onderdrukking van de onderschrijdingsspanning kan worden bereikt.
Om M9 tegen overstroom te beschermen, zijn QS2 en D1 toegevoegd. Wanneer de spanning over R S2 groter is dan de inschakelspanning van QS2, zal de extra stroom naar QS2 en D1 vloeien. De maximale stroom in M9 is ingesteld op
$$ {I}_{\mathrm{M}9\_\max}\le \left({V}_{BE\_ QS2}/{R}_{S2}\right) $$ (5)Het doel van D1 is om te voorkomen dat QS2 in het omgekeerde versterkingsgebied valt en er een omgekeerde stroom in laat vloeien, wat een abnormale toestand is van de M9-stroombegrenzingsfunctie.
Stabiliteitsverbetering van voorgestelde VR
Zoals getoond in Fig. 5, zijn er drie polen ω p1 , ω p2 , en ω p3 , en twee nullen ω z1 en ω z2 in de regellus, en de lusversterking van de voorgestelde VR is
$$ {A}_{\mathrm{Vloop}}={A}_O\beta $$ (6)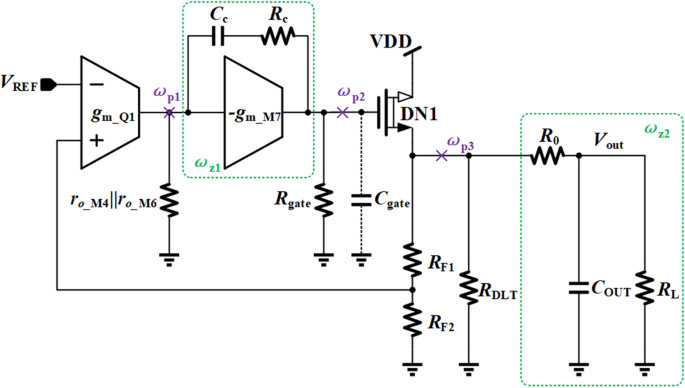
Polen en nullen verdeling van voorgestelde VR
waar A O is de open-lusversterking van de VR, en β is de feedbackcoëfficiënt,
$$ {A}_O={A}_{\mathrm{CD}0}{A}_{E0}\frac{\left(1+s/{\omega}_{Z1}\right)\left( 1+s/{\omega}_{Z2}\right)}{\left(1+s/{\omega}_{P1}\right)\left(1+s/{\omega}_{P3} \right)\left(1+s/{\omega}_{P2}\right)} $$ (7) $$ \beta =\frac{R_{\mathrm{F}2}}{R_{\mathrm {F}1}+{R}_{\mathrm{F}2}} $$ (8)waar A CD0 ≈ 1 is de laagfrequente versterking van de vermogenstrap die werkt als een spanningsvolger en A E0 is de laagfrequente versterking van de EA,
$$ {A}_{E0}={g}_{m\_Q1}\left({r}_{o\_M4}\Big\Vert {r}_{o\_M6}\right){g} _{m\_M7}{R}_{\mathrm{gate}} $$ (9)Gezien het Miller-effect en de parasitaire capaciteit op het poortknooppunt van DN1, worden de polen en nullen geschreven als [13]
$$ {\omega}_{p1}=1/\left[{g}_{m\_M7}{R}_{\mathrm{gate}}{C}_c\times \left({r}_{ o\_M4}\Big\Vert {r}_{o\_M6}\right)\right] $$ (10) $$ {\omega}_{p2}={g}_{m\_M7}/{ C}_{\mathrm{gate}} $$ (11) $$ {\omega}_{p3}=1/\left\{\left[{R}_L\Big\Vert \left({g}_ {m\_\mathrm{DN}1}^{-1}\Big\Vert {R}_{\mathrm{DLT}}+{R}_0\right)\right]{C}_{\mathrm{ OUT}}\right\} $$ (12) $$ {\omega}_{z1}=1/\left[{C}_c\left({R}_c-1/{g}_{m\_M7 }\right)\right] $$ (13) $$ {\omega}_{z2}=1/\left[\left({R}_0\Big\Vert {R}_L\right){C}_ {\mathrm{OUT}}\right] $$ (14)waar R DLT is de equivalente weerstand van het tijdelijke verbeteringscircuit; C UIT is de uitgangscondensator van de voorgestelde VR.
Aangezien de compensatiecondensator C C wordt vergroot met (g m_M7 R poort ) vanwege het miller-effect op knooppunt p1, de pool ω p1 is de dominante pool. De tweede paal moet ω . zijn p3 , omdat C UIT ligt meestal in het bereik van enkele microfarads. Hoewel de parasitaire condensator C poort relatief groot is, is het nog steeds kleiner dan zowel de equivalente capaciteit op knooppunt p1 als de uitgangscondensator. Trouwens, de weerstand bij knoop p2 is slechts 1/g m_M7 . Vandaar dat de pool ω p2 bevindt zich op hoge frequentie. De nul ω z1 is het annuleren van de middenfrequentiepool ω p3 . De weerstand R 0 genereert een nul ω z2 om de interne parasitaire pool te compenseren ω p2 . De stabiliteit van de voorgestelde VR kan worden verbeterd als weerstand R 0 toenemend. Echter, weerstand R 0 zal de fout van de uitgangsspanning verhogen als gevolg van de spanningsval veroorzaakt door de belastingsstroom. Daarom weerstand R 0 moet op een redelijke waarde worden ingesteld om een goede afweging te maken tussen de precisie van de uitgangsspanning en de lusstabiliteit.
In een conventionele spanningsregelaar zonder DLT, zal de pool bij het uitgangsknooppunt een andere frequentie hebben vanwege de door de belastingsstroom veranderende geïnduceerde transconductantievariatie van de vermogenstransistor. Naarmate de belastingsstroom toeneemt, neemt de transconductantie van de vermogenstransistor g m _DN1 zal toenemen, en dus zal de uitgangspool naar een hoge frequentie bewegen, terwijl andere nullen en polen op dezelfde positie blijven, zoals weergegeven in figuur 6a. Dit kan de frequentiecompensatie van het systeem moeilijker maken en de transiënte respons bij lichte belasting vertragen. Sterker nog, het systeem kan instabiel zijn.

Frequentierespons van spanningsregelaar. een Spanningsregelaar zonder dynamische belastingtechniek. b De voorgestelde spanningsregelaar met dynamische belastingstechniek
Met behulp van de voorgestelde DLT heeft de gepresenteerde VR een betere stabiliteit bij verschillende belastingen. Zoals eerder geanalyseerd, neemt de stroom door het dynamische belastingscircuit af naarmate de belastingsstroom toeneemt in stabiele toestand en vice versa. Aangezien deze stroom wordt geleverd door DN1, kan het de transconductantievariaties van DN1 onderdrukken binnen een breder belastingstroombereik, wat nuttig is voor de systeemstabiliteit en bandbreedteconstante tijdens een groter belastingsbereik door gebruik te maken van de voorgestelde DLT. De frequentierespons van de voorgestelde VR is in Fig. 6b, die de stabiliteit kan garanderen met een snelle transiënte respons.
De uitgangscondensator bepaalt de positie van de nul ω z2 . Door de nulpool redelijk te plaatsen, zal het systeem een betere stabiliteit hebben met verschillende C UIT .
PSR-analyse van de voorgestelde VR
PSR is een van de kritische parameters om de prestaties van spanningsregelaars te meten, en het verwijst naar het vermogen om de hoogfrequente rimpelingen en ruis als gevolg van de voedingsspanning af te stoten. De door Gupta 12 voorgestelde PSR-analysemethode wordt in deze sectie overgenomen, waarvan het belangrijkste idee is om het hele regelsysteem te vereenvoudigen tot een spanningsdelermodel. Zoals getoond in Fig. 7, zijn er twee ruispaden van V dd naar V uit :pad 1 brengt de ruis rechtstreeks over van de afvoer van vermogenstransistor DN1 naar V uit; pad 2 loopt van de tweede trap van EA naar de poort van vermogenstransistor DN1. Het effect van pad 2 kan worden uitgedrukt als
$$ {A}_{\mathrm{path}2}\circa \frac{r_{o\_M7}}{g_{m\_\mathrm{HV}10}{r}_{o\_\mathrm{ HV}10}{r}_{o\_M10}} $$ (15)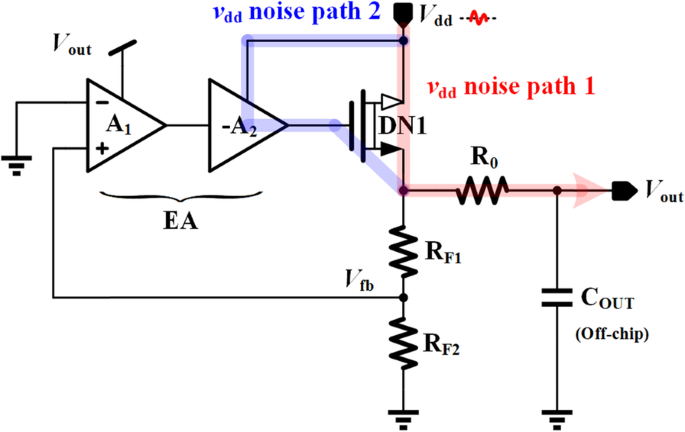
PSR-analyse van de voorgestelde VR
Zoals weergegeven in (15), A pad2 is een vrij kleine met behulp van de voorgestelde SPT en cascode huidige spiegelstructuur. Dit maakt de invloed van pad 1 dominant in PSR-analyse.
Het vereenvoudigde PSR-model van de voorgestelde VR wordt getoond in Fig. 8, waar r o_DN1 is de uitgangsweerstand van vermogenstransistor DN1 rekening houdend met ruispad 1, de gecontroleerde stroombron is afkomstig van ruispad 2, Z B bestaat uit R F1 , R F2 , R 0 , en C UIT fungeren als een filter bij hoge frequentie, en Z SH_FB is de equivalente impedantie inclusief de functie van de negatieve feedbacklus. Z SH_FB kan worden gegeven door
$$ {Z}_{SH\_ FB}=\frac{1}{g_{m\_ DN1}\left(1+\beta {A}_E\right)} $$ (16)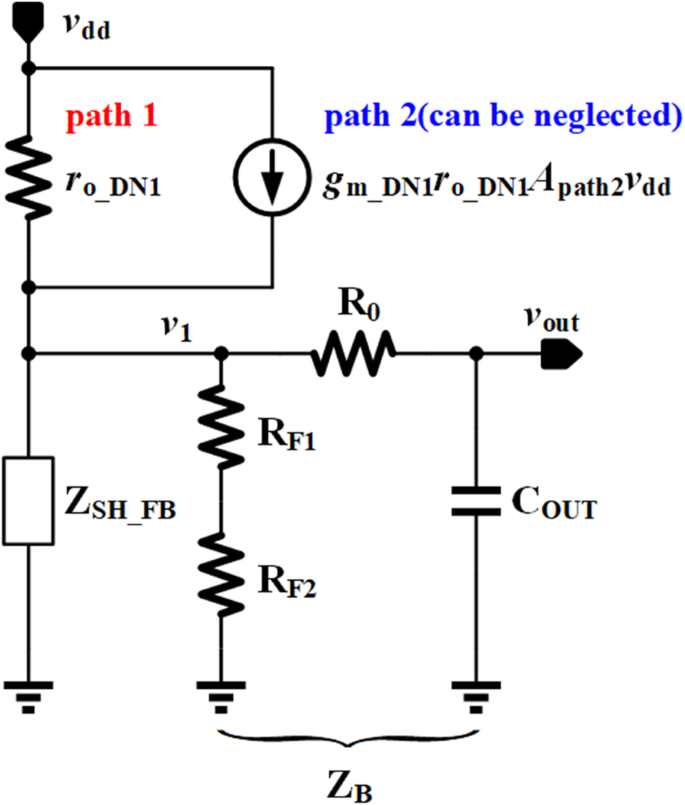
Het vereenvoudigde model van PSR
waar g m_DN1 is de transconductantie van vermogenstransistor DN1. Daarom kan de PSR-overdrachtsfunctie worden uitgedrukt als
$$ \mathrm{PSR}=\frac{V_{\mathrm{out}}}{V_{\mathrm{dd}}}=\frac{\left(1+{g}_{m\_\mathrm{ DN}1}{r}_{o\_\mathrm{DN}1}{A}_{\mathrm{path}2}\right)\left({Z}_B\Big\Vert {Z}_{ \mathrm{SH}\_\mathrm{FB}}\right)}{r_{o\_\mathrm{DN}1}+{Z}_B\Big\Vert {Z}_{\mathrm{SH}\ _\mathrm{FB}}} $$ (17)Door opzettelijk de intrinsieke versterking van HV10 veel groter in te stellen dan de vermogenstransistor DN1, g m_DN1 r o_DN1 A pad2 <<1 kan worden bereikt, en dus kan de gecontroleerde stroombron worden verwaarloosd. De uitdrukking van PSR kan verder worden vereenvoudigd als
$$ \mathrm{PSR}\circa \frac{Z_B\Big\Vert {Z}_{\mathrm{SH}\_\mathrm{FB}}}{r_{o\_\mathrm{DN}1}+ {Z}_B\Big\Vert {Z}_{\mathrm{SH}\_\mathrm{FB}}} $$ (18)Sinds Z B en Z SH_FB zal veranderen met frequentievariatie, is het noodzakelijk om de frequentiekarakteristiek van de PSR te analyseren.
De lage frequentie
Bij lage frequentie is de versterking van EA erg hoog, en C UIT kan worden behandeld als een open circuit. Dus, Z B>> Z SH_FB en de PSR kan worden geschreven als
$$ {\mathrm{PSR}}_{\mathrm{LF}}\circa \frac{1}{g_{m\_\mathrm{DN}1}{r}_{o\_\mathrm{DN} 1}\left(1+\beta {A}_{E0}\right)} $$ (19)De gemiddelde frequentie
De impedantie van Z SH_FB zal toenemen omdat de lusversterking afneemt bij de middenfrequentie. In dit stadium is de Z SH_FB is nog steeds klein en de PSR wordt voornamelijk beïnvloed door lusversterking. Met betrekking tot (7) kan de PSR worden uitgedrukt als
$$ {\mathrm{PSR}}_{\mathrm{MF}}\circa \frac{1}{g_{m\_\mathrm{DN}1}{r}_{o\_\mathrm{DN} 1}\left(1+\beta {A}_{E0}\right)}\frac{1+s/{\omega}_p}{1+s/\left[{\omega}_p\left(1 +\beta {A}_{E0}\right)\right]} $$ (20)Zoals te zien is in (20), wordt de PSR slechter en is de ruis van de uitgangsspanning ernstiger terwijl de frequentie toeneemt binnen de versterkingsfrequentie van één eenheid.
De hoge frequentie
Vanwege de toenemende frequentie, Z SH_FB wordt groot en komt uiteindelijk in de buurt van 1/g m_DN1 . De impedantie van C UIT wordt kleiner, maar het is nog steeds veel groter dan R 0 . Dus R 0 zoals voorheen kan worden weggelaten. De hoogfrequente PSR hangt af van de spanningsverdeling tussen r o_DN1 en 1/g m_DN1 parallel met C UIT , die kan worden weergegeven door
$$ {\mathrm{PSR}}_{\mathrm{HF}}\circa \frac{1}{g_{m\_\mathrm{DN}1}{r}_{o\_\mathrm{DN} 1}}\frac{1}{1+s{C}_{\mathrm{OUT}}/{g}_{m\_\mathrm{DN}1}} $$ (21)Bij hoge frequentie kan de ruis bij uitgangsspanning sterk worden onderdrukt vanwege het effect van C UIT .
Zoals eerder geanalyseerd, wordt het goede anti-ruisvermogen in het volledige frequentiebereik van de voorgestelde VR gegarandeerd door drie aspecten. Ten eerste wordt een hoge lusversterking toegepast; Ten tweede zorgt SPT ervoor dat de voedingruis weinig invloed heeft op de poort van de vermogenstransistor; Ten derde, de uitgangscondensator C UIT kan de PSR op de hoge frequentie verbeteren met filtereigenschap.
Resultaten en discussie
De voorgestelde VR is geïmplementeerd in een standaard BCD-technologie van 0,35 m. De chipfoto van de gefabriceerde regelaar wordt getoond in Fig. 9, waarvan het actieve kerngebied van de VR 290 m × 900 m is.

De chipfoto van de voorgestelde VR
De gereguleerde uitgangsspanning van de voorgestelde VR is 5 V met de voedingsspanning variërend van 5,5 tot 30 V. De uitgangscondensator is een goedkope keramische condensator. De capaciteit van de uitgangscondensator kan worden ingesteld van 100 nF tot 3,3 F.
Afbeelding 10 toont de frequentierespons van de voorgestelde VR bij verschillende belastingsomstandigheden met een uitgangscondensator van 100 nF en 3,3 F. De voorgestelde LDO kan stabiel blijven in een breed bereik van uitgangscondensatorwaarden, en de golfvorm van de lusfrequentierespons heeft een zeer klein verschil tussen 0 en 30 mA belastingsstroom, wat profiteert van de voorgestelde DLT die eerder is geanalyseerd.

Lusfrequentieresponsen van voorgestelde VR onder verschillende waarde van I Laden en C UIT conditie. een CUIT =100 nF, b CUIT =3,3 훍F. Rode en groene lijn staat voor I Laden van respectievelijk 0 A en 30 mA
Het PSR-verificatieresultaat met een uitgangscondensator van 0,1 F wordt getoond in Fig. 11, waar een − 110 dB bij lage frequentie en beter dan − 64 dB tot 10 MHz wordt bereikt. Bij de lage frequentie heeft de voorgestelde VR een goede PSR vanwege de hoge lusversterking. De PSR wordt slecht binnen de eenheidsversterkingsfrequentie vanwege de gedomineerde pool ω p . De uitgangscondensator C UIT verbetert de PSR-karakteristiek bij de hoge frequentie. Die resultaten laten zien dat het consistent is met de vorige analyse en dat de voorgestelde VR een betere PSR verkrijgt in het volledige frequentiebereik.

PSR van voorgestelde VR
Het resultaat van de lijnregeling van de voorgestelde VR wordt getoond in Fig. 12. In het ingangsspanningsbereik van 5,5 tot 30 V varieert de uitgangsspanning slechts 73,53 μV, wat resulteert in een lijnregeling van slechts 2,98 V/V. Dit bevestigt de effectiviteit van de voorgestelde SPT.

Lijnregeling van voorgestelde VR
Afbeelding 13 toont de tijdelijke respons van de uitgangsspanning als gevolg van verschillende belastingsstroom. De spanningspiek en -dip van de gereguleerde uitgangsspanning is ongeveer 43 mV, 65 mV, 83 mV wanneer de belastingsstroom verandert van respectievelijk 0 naar 18 mA, 28 mA en 32 mA. Dit resulteert in een belastingsregeling van 0,233 mV/mA, die voornamelijk wordt veroorzaakt door R 0 voor de stabiliteit met een breed scala aan uitgangscapaciteit.

Voorbijgaande responsgolfvorm van voorgestelde VR vanwege verschillende belastingstroomstappen. een 0 tot 18 mA; b 0 tot 28 mA; c 0 tot 32 mA
De gemeten OCP wordt getoond in Fig. 14. Om de effectiviteit van OCP te verifiëren, wordt kortsluiting toegepast in Fig. 14a. Zoals getoond in Fig. 14a, wanneer de overstroom optreedt terwijl de uitgangsspanning naar aarde wordt getrokken, wordt de uitgangsstroom van de voorgestelde VR op ongeveer 40 mA gehouden. Afbeelding 14b illustreert een tijdelijke respons tussen overstroom en normale belasting, wat aangeeft dat de voorgestelde VR het vermogen heeft om zichzelf te herstellen wanneer de overbelasting verdwijnt.

De OCP-meting van de voorgestelde VR. een uitgang kortsluiting; b tijdelijke tussen overstroom en normale belasting
Tabel 1 geeft een prestatievergelijking van de voorgestelde LDO en enkele andere eerder gepubliceerde LDO's. Ter vergelijking:deze LDO heeft de beste lijnregulering en PSR, die profiteert van de voorgestelde SPT. Het actieve gebied zal verder worden verkleind als het in een meer geavanceerd proces wordt vervaardigd.
Tabel 2 biedt nog een prestatievergelijking die is gericht op de LDO's die ook een breed voedingsbereik hebben. Met behulp van de voorgestelde DLT en SPT heeft dit werk de beste lijnregulering en het grootste voedingsbereik in vergelijking met andere LDO's. De extra OCP-functie maakt dit werk competitiever en betrouwbaarder.
Conclusie
Een SPT VR met hoge stabiliteit met DLT en OCP is geïmplementeerd in een standaard BCD-proces van 0,35 μm. Met behulp van SPT wordt het grootste deel van de regellus geleverd door een gereguleerde uitgangsspanning, wat gunstig is voor de stabiliteit en PSR-verbetering. De voorgestelde DLT is nuttig voor tijdelijke respons en stabiliteit. Bovendien kan het ingebedde OCP-circuit voorkomen dat de gepresenteerde VR wordt beschadigd door overbelasting of kortsluiting. The linear regulation of the proposed VR is 2.98 μV/V with VDD from 5.5 to 30 V while the regulated output voltage is 5 V, and the load regulation is 0.233 mV/mA with load current from 0 A to 30 mA. The overshoot and undershoot voltage during load current changing is also small by using the presented transient enhancement circuit. The PSR at low frequency is − 110 dB, and is better than − 64 dB up to 10 MHz. High loop stability can be achieved in a wide range of output capacitor and load current, and thus the proposed VR is suitable for applications that require high performance and reliability under variations of output capacitor and load current.
Beschikbaarheid van gegevens en materialen
All data generated or analysed during this study are included in this published article.
Afkortingen
- VR:
-
Voltage regulator
- OCP:
-
Overcurrent protection
- SPT:
-
Self-power technique
- PSR:
-
Power supply rejection
- DLT:
-
Dynamic load technique
- EA:
-
Error amplifier
Nanomaterialen
- Spanningsregelaar
- DC-circuitvergelijkingen en wetten
- Gemiddelde en zomercircuits
- Spanning en stroom
- condensatoren en calculus
- Complexe spannings- en stroomberekeningen
- Enkele voorbeelden met wisselstroomcircuits
- Maxim:dubbele IO-Link-transceiver met DC-DC-regelaar en overspanningsbeveiliging
- ST:schakelende regelaar met brede spanningsbereiken
- Leidinggevend met volharding en doorzettingsvermogen
- 5 stappen om de operationele architectuur opnieuw vorm te geven en de resultaten te verbeteren met IoT