


De 5 stappen om kwaliteit te bereiken Robotic Incremental Forming
Robotische incrementele vorming is kosteneffectief voor het vormen van kleine batches. Deze casestudy laat zien hoe één team kwaliteit bereikte met RoboDK.
Mario Guillo en zijn team zijn onderzoekers aan het Institut Maupertuis in Frankrijk, dat gespecialiseerd is in industrieel onderzoek.
Het team merkte een paar problemen op met de traditionele methoden voor het vormen van plaatstaal... en ze besloten die problemen op te lossen.
Waarom het vormen van kleine batches kostbaar is
Het vormen van plaatwerk is een spel met getallen. Als u een groot aantal identieke onderdelen vervaardigt, zullen de kosten en tijd meestal gelijk zijn. Als u echter slechts één of twee delen maakt, wordt het al snel oneconomisch.
Diep tekenen is een van de meest gebruikte methoden voor het vormen van vellen. Het omvat het ontwerpen en vervaardigen van een matrijs, waarna elk vel materiaal langzaam over de matrijs wordt "uitgerekt". Als je maar een paar onderdelen maakt, wegen de kosten van de matrijs ruimschoots op tegen de kosten van het vormen zelf.
Traditioneel is de manier waarop de meeste fabrikanten met dit probleem zijn omgegaan, het gewoon te accepteren. "Nou, dat is het leven", zegt u. U kruist uw vingers en hoopt dat de rest van onze bewerkingen dit ene inefficiënte proces zullen compenseren. Of, als de kwaliteit niet belangrijk is, kunt u ervoor kiezen om het vel met de hand te vormen.
Mario en zijn team hebben besloten dat het niet zo hoeft te zijn. Er is een methode om kwaliteitsproducten te vormen die economisch is voor kleine batches:incrementeel vormen.
In deze casestudy laten we zien hoe Mario en zijn team RoboDK gebruikten om op economische wijze kwaliteitsproducten te maken met incrementele robotvorming.
Wat is Robotic Incremental Forming?
 Incrementeel vormen (ook bekend als incrementeel plaatvormen) is een alternatief voor dieptrekken waarbij plaatmateriaal weinig wordt vervormd. beetje bij beetje, laagje voor laagje. Op deze manier lijkt het een beetje op 3D printen of CNC verspanen. In plaats van in elke laag materiaal toe te voegen of te verwijderen, wordt het plaatmateriaal bij elke laag heel licht gebogen.
Incrementeel vormen (ook bekend als incrementeel plaatvormen) is een alternatief voor dieptrekken waarbij plaatmateriaal weinig wordt vervormd. beetje bij beetje, laagje voor laagje. Op deze manier lijkt het een beetje op 3D printen of CNC verspanen. In plaats van in elke laag materiaal toe te voegen of te verwijderen, wordt het plaatmateriaal bij elke laag heel licht gebogen.
Sinds de jaren 1990 is incrementele vorming bereikt met behulp van aangepaste CNC-machines. Het CNC-gereedschap wordt vervangen door een enkelpuntsbol die voor elke laag de gewenste vorm op het plaatmateriaal tekent. Er wordt een smeermiddel gebruikt om het effect van wrijving te verminderen.
Gewijzigde CNC-machines zijn een goede oplossing, maar ze hebben een probleem:ze zijn duur voor grotere onderdelen. Dit kan het onhaalbaar maken voor bedrijven die incrementele vorming willen gebruiken voor prototyping, wat een veel voorkomende toepassing is.
Robotische incrementele vorming lost dit probleem op door een industriële robot te gebruiken om het gereedschap vast te houden. Het vertoont overeenkomsten met het machinaal bewerken van robots die we in een vorige post hebben geïntroduceerd.
In tegenstelling tot CNC-machines, beperkt de robot de grootte van het onderdeel niet. Als gevolg hiervan denkt Mario's team dat gerobotiseerde incrementele vorming kan worden gebruikt voor een groot aantal toepassingen waarvoor grote platen moeten worden gevormd, waaronder schedelimplantaten, prothesen en autopanelen.
5 stappen voor het bereiken van kwaliteit Robotic Incremental Forming
Robotic incrementeel vormen is verrassend eenvoudig... maar alleen als je de juiste stappen volgt. Het team gebruikte de volgende vijf stappen (zoals beschreven in hun onderzoekspaper) om een kwaliteitsproduct te bereiken met incrementele robotvorming:
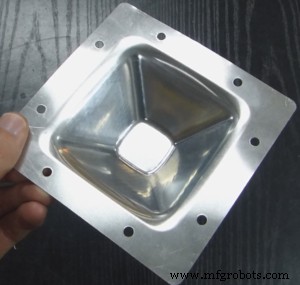
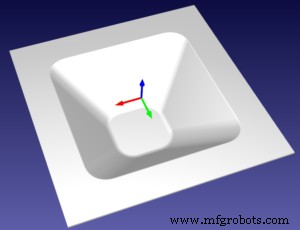
1. Bouw het 3D-model
Bijna alle producten zijn ontworpen in CAD-pakketten (Computer Aided Design), dus deze stap zou eenvoudig moeten zijn. U moet de vorm definiëren die u wilt maken en er een 3D-model van maken.
2. Genereer een traject
Je zou dan een CNC-traject moeten genereren. Dit kan in veel CAM (Computer Aided Manufacturing) pakketten. Mogelijk kunt u zelfs het model en het traject in dezelfde software genereren. Als uw CAD/CAM-software deze functie echter niet heeft, kan een goedkoop CAM-programma zoals CamBam, MeshCAM of FreeMILL een goede optie zijn.
Het team gebruikte de CamBam CNC-software, een kosteneffectieve tool voor het ontwerpen en bouwen van CNC-modellen en -trajecten.
Tijdens deze stap moet je de diepte van elke laag en de laagstrategie bepalen. Het team legde uit dat er twee algemene strategieën zijn voor eenvoudige onderdelen:
- Z-laagstrategie — Deze eenvoudige strategie houdt in dat elke laag afzonderlijk wordt getekend, inspringend aan het begin van elke laag.
- Spiraalstrategie — Deze iets complexere strategie omvat het tekenen van een ononderbroken lijn die van de bovenkant van het formulier helemaal naar beneden loopt. Dit levert een gladder stuk op en legt minder krachten op de robot.
3. Genereer G-code
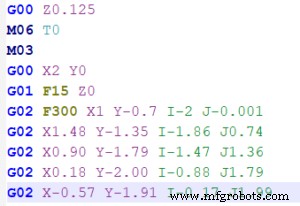
Zodra je je traject hebt, is de volgende stap om het om te zetten in instructies die een CNC-machine kan begrijpen. De meest gebruikelijke optie is G-Code, maar u kunt ook APT-CLS of NCI gebruiken.
Met traditionele op CNC gebaseerde incrementele vorming zou dit de laatste stap zijn vóór de productie. Omdat we robots gebruiken, is er echter nog een andere — zeer belangrijke — stap.
4. Verander de G-code in robotopdrachten
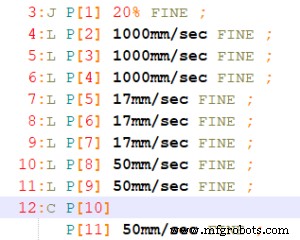
Om een robot te gebruiken voor incrementeel vormen, je moet de G-code omzetten in opdrachten die de robot zal begrijpen. Elke robotfabrikant heeft echter zijn eigen programmeertaal. Sommige fabrikanten hebben gespecialiseerde CNC-software-add-ons, maar die zijn vaak erg duur en werken alleen met hun eigen robot.
Mario en zijn team besloten om RoboDK te gebruiken, omdat het standaard een Robot Machining Tool bevat. Het is heel gemakkelijk te gebruiken en is kosteneffectiever dan andere opties op de markt. U laadt eenvoudig het G-Code-bestand in de software en het genereert automatisch het robotpad, waardoor robotfouten worden vermeden.
5. Breng het programma over naar de robot
De laatste stap is om het programma over te dragen naar de robot en het incrementele vormingsproces te starten. Als alle voorgaande stappen goed zijn gegaan, zou dit redelijk eenvoudig moeten zijn. Er zijn echter twee punten die u in gedachten moet houden:
- Kies een zeer rigide robot — Robots hebben een lagere stijfheid dan CNC-machines. Dit kan ertoe leiden dat het gereedschap doorbuigt wanneer er zeer hoge krachten worden uitgeoefend, wat kan gebeuren bij bewerkingstaken. Het team gebruikte een robot voor zware lasten (met een laadvermogen van meer dan 500 kg) om ervoor te zorgen dat deze voldoende stijf was voor de taak.
- Vermijd onnodig dik materiaal — Dik materiaal zal moeilijk te vormen zijn met de robot vanwege hun lage stijfheid. Kies alleen de materiaaldikte die nodig is voor uw product en wees erop voorbereid om dunner materiaal te gebruiken als u doorbuigingen van het gereedschap begint te zien.
De eerste keer dat u het programma uitvoert, let op eventuele afwijkingen van het gereedschap die kunnen worden veroorzaakt door overmatige krachten die op het robotgereedschap worden uitgeoefend.
Hier is een video van het project van het team:
Dit werk is tot stand gebracht door Institut Maupertius met de medewerking van Halcyon performance.
Industriële robot
- De 3 basisstappen van 3D-printen
- Robotische lassystemen:de juiste kiezen
- 3 trends in robotische materiaalbehandeling in de industriële sector
- Het belang van het beheer van de workflow voor robotlassen
- De voordelen van laspistolen met doorlopende arm
- Robotisch lassen versus handmatig lassen:verbetering van kwaliteit en efficiëntie
- 5 robottoepassingen in de lucht- en ruimtevaartindustrie
- Zeven stappen om kwaliteit in de hele toeleveringsketen te garanderen
- De ultieme gids voor gerobotiseerde palletiseermachines
- De kwaliteitsdocumenten bijwerken
- Robotic Machining:de volgende dimensie