


Wat is in godsnaam een zelfprogrammerende robot?
Als we bedenken hoe we AI, autonoom functioneren en robotica kunnen combineren, hebben Hollywood en soepele scenarioschrijvers ons ervan overtuigd dat de toekomst ergens tussen "The Terminator" en "Her" zal landen. Hoewel fantasieën nodig zijn om het leven interessant te houden, is het een feit dat robots die autonoom kunnen werken simpelweg te nuttig zullen zijn om de wereld over te nemen. Wat ze echt zullen doen, is lang benodigde rollen vervullen die ons uiteindelijk meer vrijheid als mensen geven dan we ooit hebben gekend.
Volgens MIT zijn autonome robots "intelligente machines die in staat zijn zelfstandig taken in de wereld uit te voeren, zonder expliciete menselijke controle." In deze context weten we dat menselijke controle een beperking is, maar wat zijn de grenzen?
Om robotautonomie te bereiken, is de eerste limiet die een robot moet overschrijden, het vermogen om zichzelf te programmeren - het vermogen om doelen te stellen die ervoor zijn gesteld en een manier te vinden om dit te bereiken zonder handmatige menselijke tussenkomst.
De volgende stappen naar robotautonomie zijn, zo blijkt, veel kwalitatiever. Het is in deze kwaliteiten - of het nu gaat om een geleverde dienst, een uitgevoerd proces of gegenereerde gegevens - waar het idee van robotautonomie echt tot leven komt.
Robotprogrammering is vermoeiend, vervelend en verschrikkelijk
De waarheid is dat robots tegenwoordig over het algemeen erg "dom" zijn. Dat is natuurlijk geen epitheton - gezien wat ze kunnen bereiken als ze goed zijn geprogrammeerd, zijn het ongelooflijk krachtige oplossingen. Elk roboticabedrijf werkt eraan om de robots die ze verkopen gebruiksvriendelijker te maken, en terwijl sommige robotica-startups hetzelfde doen bovenop de bestaande hardware, hoopt elk bedrijf in de ruimte dat robots op een dag in staat zullen zijn om te programmeren zich.
Waarom is dit een gemeenschappelijk doel in de robotica-industrie? Omdat robotprogrammering een enorm vervelend proces is, kost dit vaak een aanzienlijk budget binnen elke robotica-integratie. Voor degenen die niet bekend zijn met het proces, is robotprogrammering - hoewel leuk voor veel professionals - pijnlijk om goed te doen, omdat het vaak tot 6 vrijheidsgraden, tientallen potentiële gereedschapspaden en eindposities en een verscheidenheid aan kinematische beperkingen die diepgaande overweging vereisen om het meest efficiënt mogelijke robotbewegingsprogramma te genereren.
Tegelijkertijd moet dit proces van bewegingsgeneratie handmatig worden gedaan voor elk onderdeel en elke omgeving waarin een robot moet werken. Dit betekent dat robots tot op heden praktisch zijn geweest voor bedrijven in sectoren als transport en consumentenproducten. elektronica, maar onpraktisch (met uitzondering van gespecialiseerde toepassingen) voor de meeste bedrijven die geen tienduizenden hoogwaardige SKU's per jaar produceren, met een anders beperkte variëteit van producten.
Dat is waar zelfprogrammeringsmogelijkheden een game-changer kunnen worden voor de maakindustrie. Het grootste deel van de kosten die het gebruik van een robot met zich meebrengt, zit in het programmeren ervan en het vervolgens structureren van een productieruimte om aan zijn behoeften te voldoen. Door programmering terug te brengen tot iets dat automatiseerbaar is, is het dan mogelijk om robots zich aan te laten passen aan zowel de onderdelen als de omgeving eromheen. Door dit te bereiken, kunnen robots eindelijk door allerlei fabrikanten worden gebruikt, ongeacht de mix van onderdelen of SKU's.
Wat is er nodig om "Zelfprogrammering" te bereiken?
In de loop der jaren (en decennia) zijn er verschillende oplossingen geïntroduceerd om het programmeren van robots gemakkelijker te maken. Teach hangers, kinematische instructie en offline programmeren zijn allemaal manieren waarop roboticaleveranciers het proces eenvoudiger en nuttiger hebben gemaakt voor ingenieurs, programmeurs en integrators.
Uiteindelijk kunnen deze allemaal sommige elementen van het proces automatiseren of ze op zijn minst intuïtiever maken, maar elke volledige beweging duurt nog steeds uren, dagen of zelfs weken om te genereren en te valideren, en dit alles natuurlijk binnen zeer gestructureerde omgevingen.

Om na te denken over wat een robot nodig heeft om zijn eigen beweging te genereren, is een belangrijk antwoord nadenken over wat robots meer op ons zou kunnen laten lijken. Zonder al te filosofisch te worden, vertrouwen wij mensen op onze zintuigen om bijna alles te leren wat we weten. Tegelijkertijd stellen onze zintuigen ons in staat om onze omgeving te interpreteren en erop te reageren - veel hiervan gebeurt onbewust, reflexmatig, instinctief of zelfs aangeleerd naarmate we ouder worden.
Robots de zintuigen geven die ze nodig hebben om vervolgens te reageren aan hun omgeving - het vermogen om 3D-ruimte en texturen in het bijzonder te interpreteren - zou hen dan de informatie laten verzamelen die ze nodig hebben om zichzelf te programmeren om een doel te bereiken.
Een zelfprogrammerende robot zou op zichzelf kunnen worden bereikt met de juiste set algoritmen, maar met welk doel? De echte uitdaging hier is om een robot zichzelf te laten programmeren naar een conventioneel haalbaar doel - hetzelfde vermogen van een mens gebruiken om een robot effectief te programmeren met bestaande tools en er een automatisch proces van te maken.
Het proces bij spuitbewerkingen

Hoe gebeurde dit? Om het voorbeeld van spuitprocessen te nemen, is de essentiële behoefte om een kwaliteitsoutput te bereiken, simpel gezegd, het vermogen om het onderdeel in de ruimte te identificeren en te interpreteren. Door dit te weten, met het juiste vermogen om daadwerkelijk een programma te genereren, kan een robot een doel bereiken om een oppervlak te bedekken met coating (of het te besproeien met een thermisch pistool of schurende materialen).
Over het algemeen moet deze nauwkeurigheid tot één millimeter of minder gaan om dezelfde scherpte te bereiken die mensen hebben tijdens een werkproces. Gelukkig is dit een nauwkeurigheidsniveau dat haalbaar is met infraroodsensoren, die bij het combineren van meerdere hoeken en posities de informatie kunnen leveren die nodig is om een Digital Twin van een object in de 3D-ruimte weer te geven.
Van daaruit kunnen bedrijven met dat soort mogelijkheden taken automatiseren die als vervelend en zelfs gevaarlijk voor menselijke werknemers werden beschouwd. 40 uur per week, 50 weken per jaar gedurende 30 of 40 jaar spuiten en coaten van industriële onderdelen is niet het beste wat je kunt doen - of het nu voor je gezondheid of je psyche is - terwijl het toevoegen van een robot materiële voordelen creëert die andere banen gemakkelijker maken en leuker om te doen.
In vergelijking met traditionele robotprogrammering komen de voordelen niet eens in de buurt. Bij de meeste coatingactiviteiten is er een grote verscheidenheid aan onderdelen waaraan moet worden gewerkt, of dit nu op een bepaalde dag of in een bepaalde productierun is. Veel fabrikanten hebben in deze omstandigheden geprobeerd om robots te gebruiken, maar zijn daar niet in geslaagd, en autofabrikanten zijn tegenwoordig over het algemeen de overgrote meerderheid van gebruikers van verfrobots. Met zelfprogrammerende robots zal die storing echter drastisch verschuiven.

Wat komt er na Sense?
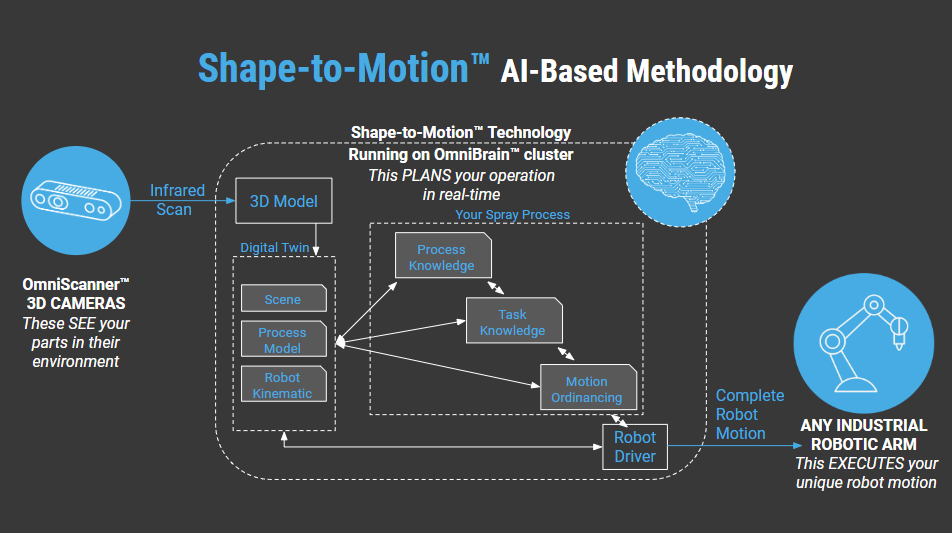
Nu je de doelen begrijpt die een zelfprogrammerende robot kan bereiken, is het belangrijk om te begrijpen wat er van voor naar achter in het proces komt. Nadat hij zijn omgevingsgevoel heeft gegenereerd, moet een zelfprogrammerende robot alle conventionele vereisten van een industriële robot verwerken, met de extra behoefte om begrijpen de unieke kenmerken van een proces of cel. Dit kan proceskennis zijn (bijv. waar moet ik stappen om iemand uit de weg te gaan of welk patroon moet ik gebruiken om verf op een oppervlak aan te brengen), of specifieke instructies die worden ingevoerd via een basissoftware-interface om ervoor te zorgen dat exacte kwaliteitsdoelen prioriteit krijgen - allemaal, nog steeds, natuurlijk zonder dat programmering vereist is.
Hieronder is slechts één voorbeeld van hoe het zelfprogrammeringsproces is georganiseerd. De Shape-to-Motion™-technologie van Omnirobotic maakt gebruik van 3D-camera's om vervolgens een 3D-model van de cel te reconstrueren. Door in een fabrieksomgeving verbonden te zijn met procescontrollers en zich bewust te zijn van de positie en beperkingen van de robot zelf in de ruimte, kan de robot proceskennis, taakuitsplitsingen en bewegingsregelingen gebruiken om deel te nemen aan een parallel taakplanningsproces. Elke uitkomst wordt beoordeeld in de Digital Twin-omgeving, wat vervolgens leidt tot de meest optimale uitkomst – soms op basis van 10.000+ scenario’s per operatie.
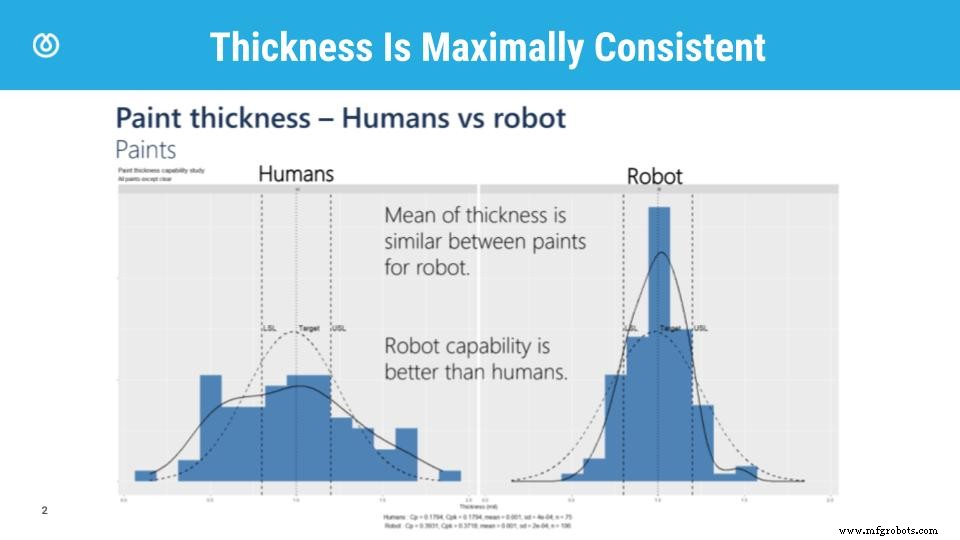
Door dit vermogen te gebruiken om taken te prioriteren, kan een robot effectief een reeks bewegingen voor zichzelf genereren die samen een compleet proces vormen. Omdat robots inherent consistenter en voorspelbaarder zijn en langer sneller kunnen werken dan mensen (zoals natuurlijk van machines mag worden verwacht), is de uiteindelijke output van een zelfprogrammerende robot veel consistenter dan welke oplossing dan ook.
Als je iets maakt, moet je een doel hebben
AI kan sommige banen vervangen, maar in dat proces van het automatiseren van hoogwaardige knelpunten in al onze productie- en werkprocessen, zullen ze daadwerkelijk vraag creëren naar meer creatieve, innovatieve en intuïtieve banen van mensen. Hoewel er ooit een manier zal zijn om deze unieke menselijke eigenschappen te automatiseren, waarom zouden we willen dat dat gebeurt? En zouden wij als consumenten natuurlijk net zo geïnteresseerd zijn in de "creativiteit" die door een machine wordt voortgebracht?
Natuurlijk geeft zelfprogrammerende technologie ons net zo'n kick in de verbeelding als een goede film, maar het is belangrijk om ons te verankeren in de praktische en kosteneffectieve voordelen van elke technologie. Er is een duidelijke behoefte aan efficiëntere en effectievere productieprocessen en er blijft een tekort aan geschoolde arbeidskrachten bestaan, zelfs te midden van recordwerkloosheid.
Feit is dat het inzetten van meer robots de beste manier is om mensen weer aan het werk te krijgen. Hoe, vraag je? Naarmate u meer productiviteit (en dus winstgevendheid) creëert, kunnen hierdoor daadwerkelijk nieuwe banen worden gecreëerd, kunnen de lonen stijgen en kunnen meer leden van een bepaald bedrijf of een bepaalde samenleving profiteren van de vruchten van hun werk. Als je meer wilt weten over waarom robots in de toekomst zoveel meer noodzakelijk zullen zijn voor zowel het bedrijfsleven als de samenleving, bekijk dan deze geweldige Robo Busines Direct-lezing van de beroemde roboticus Rodney Brooks.
En natuurlijk, als u wilt begrijpen hoe zelfprogrammerende technologie de spuitprocessen van vandaag al ten goede kan komen, aarzel dan niet om onze hoofdwebsite te bezoeken.
Omnirobotic is de enige leverancier van zelfprogrammerende, autonome robottechnologie voor high-mix spuitafwerkingsprocessen. Als u de unieke voordelen van zelfprogrammerende robots voor industriële productiebedrijven wilt begrijpen, neem dan contact met ons op via sales@omnirobotic.com of bekijk onze terugverdiencalculator.
Industriële robot
- Wat een autonome robot wel en niet kan
- Wat is het echte verschil tussen een autonome robot en een HMI?
- Het cashflow-effect van robots begrijpen
- Wat is de realiteit van robotvisie?
- De robots bezig houden
- Knikgestuurde robots:gids voor de meest bekende industriële robot
- Cartesiaanse robots:gids voor de meest schaalbare robottechnologie
- Wat maakt een hoogwaardige robotsimulatiesoftware?
- Wat zijn de voordelen van een industriële robot?
- Welke banen hebben robots gecreëerd?
- COBOTS Vs. Industriële robots:wat is het verschil?