


Rijden met 28BYJ-48 stappenmotorbesturing met joystick
Componenten en benodigdheden
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
Over dit project
Benodigde hardware:
- Arduino UNO-bord
- 28BYJ-48 stappenmotor (met ULN2003A driver board)
- Joystick
- 5V stroombron
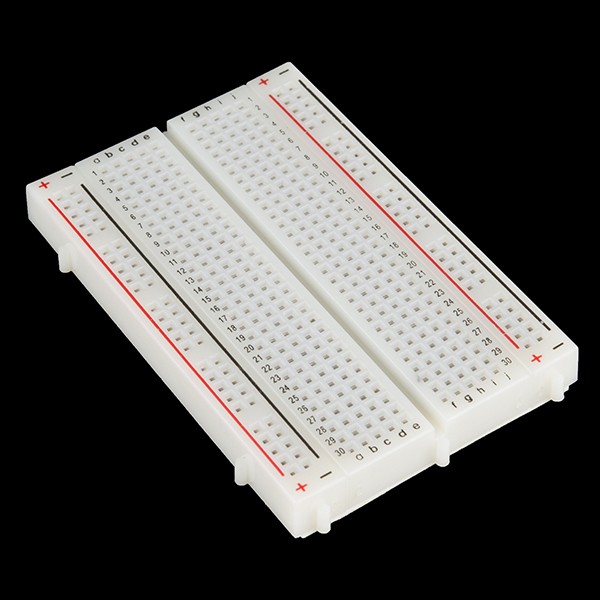
- Broodplank
- Jumperdraden
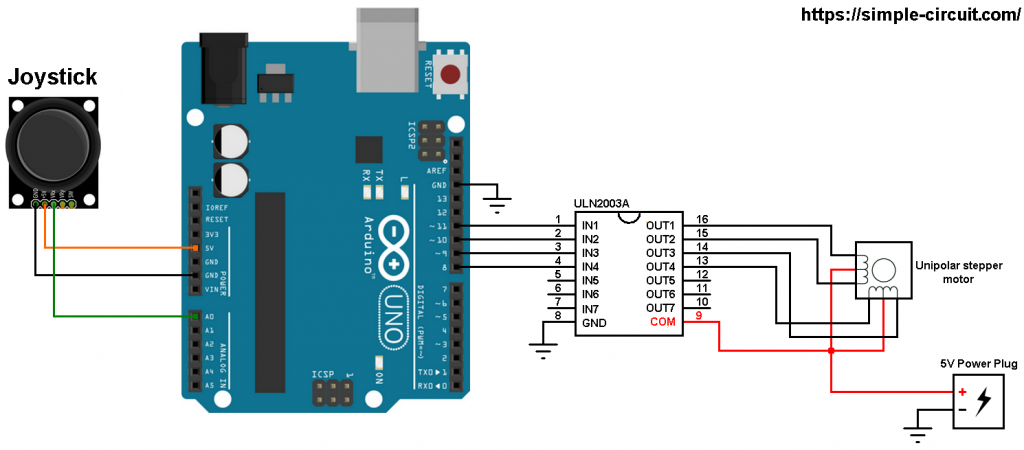
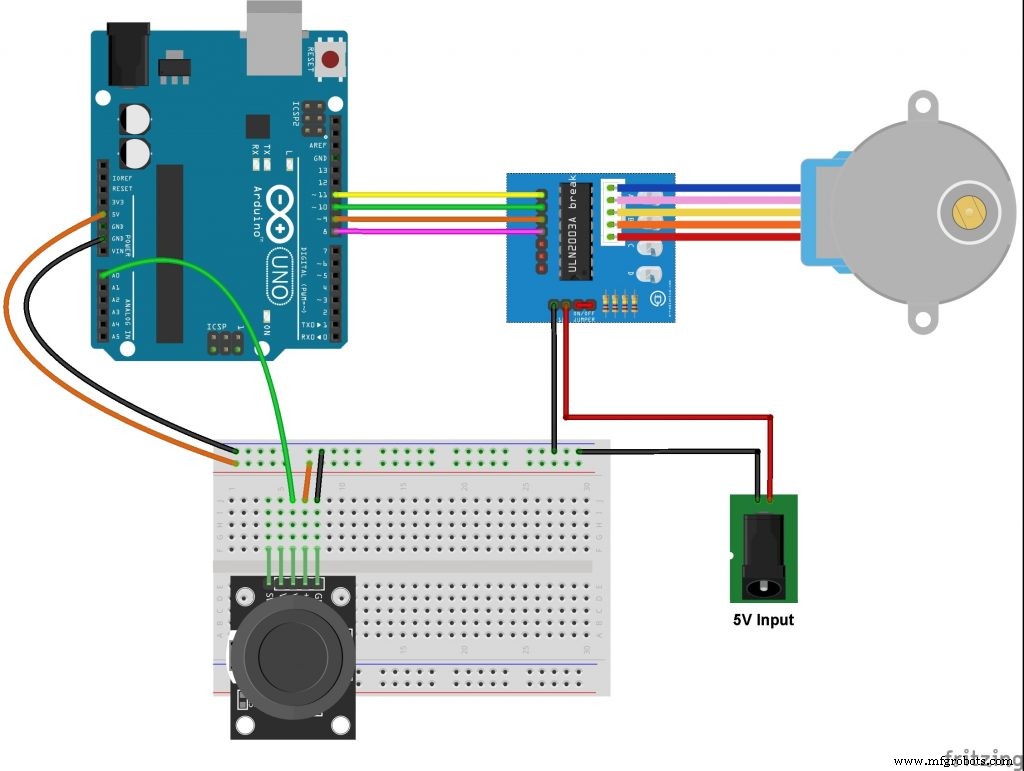
Stappenmotorbesturing met Arduino en joystickcircuit:Het schematische diagram van het projectcircuit wordt hieronder weergegeven (alle geaarde terminals zijn met elkaar verbonden).
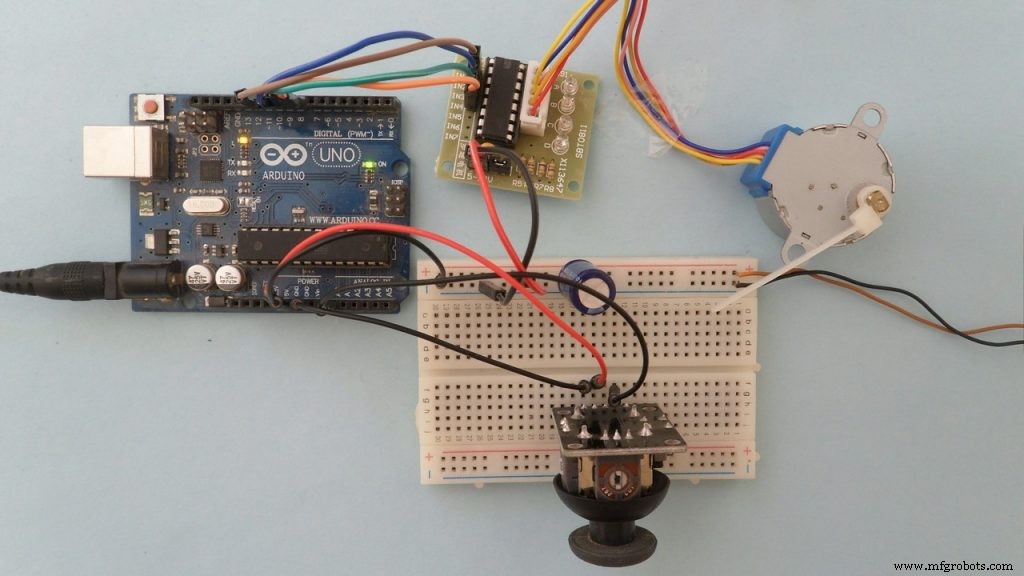
en de volgende afbeelding toont het frituurcircuit:
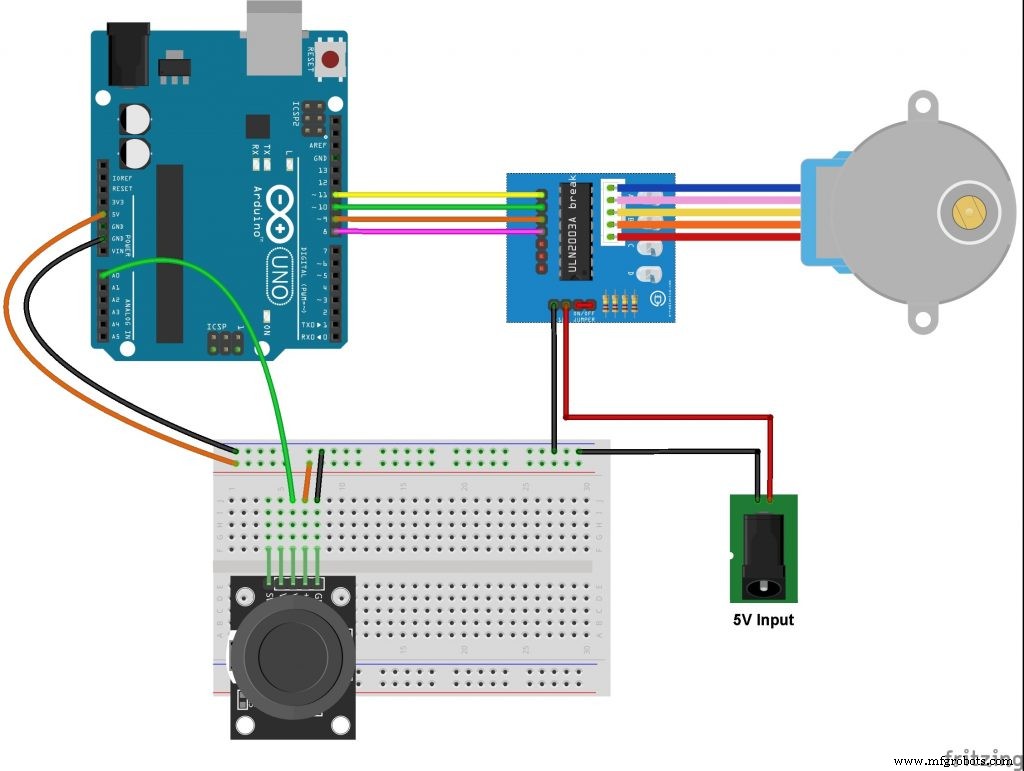
De stappenmotor is aangesloten op het ULN2003A-bord dat wordt geleverd met een externe voedingsbron van 5V. De stuurlijnen (IN1, IN2, IN3 en IN4) van dit bord zijn als volgt verbonden met de Arduino:IN1 naar Arduino pin 11IN2 naar Arduino pin 10IN3 naar Arduino pin 9IN4 naar Arduino pin 8
Het joystickbord heeft 5 pinnen:GND, +5V, VRX, VRY en SW waarbij:GND en +5V voedingspinnen zijn VRX is de X-as potentiometeruitgang VRY is de Y-as potentiometeruitgangSW is de drukknopterminal (de andere terminal is verbonden met GND). De uitgang van de X-as potentiometer (VRX) is verbonden met Arduino analoge pin A0, Y-as potentiometeruitgang (VRY) kan ook worden gebruikt. De schakelpen (SW) wordt in dit voorbeeld niet gebruikt. Met behulp van de X-as en de Y-as potentiometers kunnen we twee stappenmotoren onafhankelijk van elkaar aansturen.
"Dus jongens als jij vind ik leuk het project dus vergeet het niet te volgen en leuk te vinden"
Code
- CODE:
CODE:C/C++
zorg ervoor dat u alle bibliotheken toevoegt die in deze code zijn opgenomen//dit project is gemaakt door BEASTIDREES62 https://id.arduino.cc/?code=MTxqeHweG6vL2cur&state=amxEcTB2bnNiYjluTUxmRExWaWZnOXIzUk1BLWRqZxOD3B%JNGD3 Arduino% stappenmotorbibliotheek#include// definieer het aantal stappen per omwenteling#define STEPS 32 // definieer de stappenmotorbesturingspinnen#define IN1 11#define IN2 10#define IN3 9#define IN4 8 // initialiseer de stepperbibliotheekStepper stepper (STEPS, IN4, IN2, IN3, IN1); // joystick pot output is verbonden met Arduino A0#define joystick A0 void setup(){} void loop(){ // lees analoge waarde van de potentiometer int val =analogRead(joystick); // als de joystick zich in het midden bevindt ===> stop de motor if( ((val> 500) &&(val <523) ) { digitalWrite(IN1, LOW); digitalWrite (IN2, LAAG); digitalWrite (IN3, LAAG); digitalWrite (IN4, LAAG); } else { // verplaats de motor in de eerste richting while (val>=523) { // map de snelheid tussen 5 en 500 rpm int speed_ =map (val, 523, 1023, 5, 500); // stel motorsnelheid stepper in.setSpeed (speed_); // verplaats de motor (1 stap) stepper.step (1); val =analoog lezen (joystick); } // verplaats de motor in de andere richting terwijl (val <=500) { // map de snelheid tussen 5 en 500 rpm int speed_ =map (val, 500, 0, 5, 500); // stel motorsnelheid stepper in.setSpeed (speed_); // verplaats de motor (1 stap) stepper.step (-1); val =analoog lezen (joystick); } } }
Schema's
Productieproces
- Motorbesturingscircuits
- Stappenmotoren
- Verzacht de prestaties van de EV-aandrijflijn met een veldgericht regelalgoritme
- Toegangscontrole met QR, RFID en temperatuurverificatie
- Autonome Nerf Sentry-toren
- Bedien muntvangers met Arduino
- Bipolaire stappenmotorbibliotheek
- Obstakels vermijden robot met servomotor
- Swiper - Auto Tinder/Bumble Swiper
- Arduino met Bluetooth om een LED te bedienen!
- Draaibank Met CNC