


Verzacht de prestaties van de EV-aandrijflijn met een veldgericht regelalgoritme
Krachtige motoren hebben een regelmechanisme nodig dat zorgt voor meer soepelheid, betrouwbaarheid en efficiëntie. Een van de meest treffende voorbeelden van een dergelijke toepassing is de motor die wordt gebruikt in de aandrijflijn van elektrische voertuigen (EV), die kan worden bestuurd door een op veldgeoriënteerde besturing (FOC) gebaseerd systeem.
Om een EV-aandrijflijn soepel te laten rijden, moet het regelschema zodanig zijn dat de motor over een breed toerentalbereik kan werken en een maximaal koppel kan produceren bij de laagste snelheden. Technisch gezien moet de motorregeling gebaseerd zijn op koppel en magnetische flux, zodat we het koppel nauwkeurig kunnen regelen door de stroom te regelen.
Het basisprincipe van het draaien van de rotor van een motor is het opwekken van een magnetisch veld in de stator. Dit gebeurt door de statorspoelen te bekrachtigen met wisselstroom. Het geheim van de soepele werking van een motor ligt in het kennen van de positie van de rotor, de hoek tussen de fluxas van de rotor en de magnetische as van de stator. Zodra deze waarde bekend is, wordt de statorstroom uitgelijnd met de koppelas van de rotor. Om maximale efficiëntie te bereiken, moet de magnetische flux van de stator loodrecht op de magnetische flux van de rotor staan.
FOC-gebaseerde motorbesturing
Op papier ziet een typisch veldgeoriënteerde besturing (FOC)-gebaseerd motorbesturingssysteem eruit zoals weergegeven in afbeelding 1.
klik voor afbeelding op volledige grootte
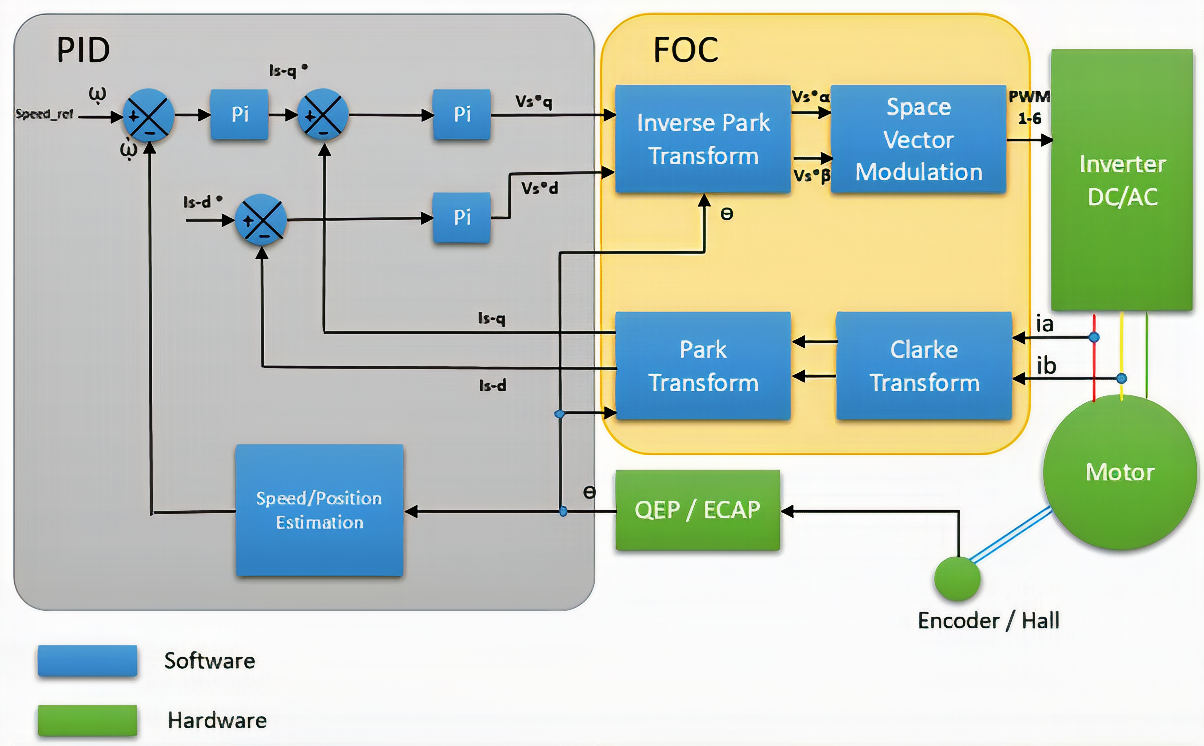
Figuur 1:Het diagram toont hardware- en softwarecomponenten van een FOC-gebaseerd motorbesturingssysteem. Bron:Texas Instruments
Laten we elk van de software- en hardwarecomponenten begrijpen:
- Driefasige omvormer :Een driefasige AC/DC-omvormer levert de driefasige spanning aan de PMSM/BLDC-motor voor de aandrijving. Het neemt pulsbreedtemodulatie (PWM) signalen van het space vector modulation (SVM) blok.
- QEP-interface :Het communiceert met een encoder om de mechanische positie van de rotor te verkrijgen en door te geven aan andere blokken.
- Inschattingsblok voor snelheid/positie :Zoals de naam al doet vermoeden, worden in dit blok berekeningen voor het verkrijgen van de rotorpositie en -snelheid uitgevoerd.
- PID-regeling :Proportionele integrale afgeleide (PID) is een regelkring die vertrouwt op feedback van de motor in de vorm van koppel. Door het verschil te berekenen tussen het gewenste koppel en het koppel ontvangen van het Park-transformatieblok, maakt het de correctie.
- Clarke-transformatie :Het Clarke-transformatieblok converteert de statorstroom (ia, ib) naar het flux- en koppel (d-q) coördinatensysteem met behulp van de Clarke-transformatieformule. Het stationaire referentieframe van een driefasensysteem wordt omgezet in een tweekwadrantsysteem in een stationair referentieframe.
- Parktransformatie en inverse Parktransformatie :Dit blok converteert het stationaire referentieframe naar roterend referentieframe met een tweefasensysteem met orthogonale assen. De orthogonale componenten zijn d-q, die respectievelijk motor directe en kwadratuuras zijn. Het inverse Park-transformatieblok komt in beeld wanneer de uitgangsspanning van de stator terug moet worden omgezet naar stationaire framereferentie (statorreferentie).
- Ruimtevectormodulatie :Het is een techniek om het PWM-signaal te bepalen dat op de motor moet worden toegepast. SVM neemt de statorspanningsvector als ingang en produceert driefasige uitgangsspanning als uitgang.
Vervolgens zullen we onderzoeken hoe deze componenten worden gebruikt bij het aandrijven van een motor met behulp van het FOC-algoritme.
Een overzicht van de FOC-workflow
Om een driefasige elektromotor te regelen, moeten we de motor van de juiste spanning voorzien door fasestroom Ia, Ib, Ic te lezen. Zonder er controle over te hebben, is het niet mogelijk om een statorfluxvector te creëren, die zich op 90 graden ten opzichte van de rotorfluxvector bevindt.
FOC is een rekenintensief algoritme dat helpt om dit en meer gemakkelijk te bereiken, hoewel het ontwikkelen van FOC behoorlijk complex is. Het FOC-algoritme is in staat om de controle van driefasige sinusoïdale stromen referentieframe te vereenvoudigen door ze te ontbinden tot flux- en koppel (d-q) referentieframes. Deze twee componenten kunnen afzonderlijk worden bediend.
Figuur 1 toont de encoder/Hall die de positie van de rotor bepaalt en doorgeeft aan het snelheids-/positieblok. Deze waarde wordt ook ingevoerd in het blok Park en inverse Park-transformatie. Op hetzelfde moment worden de fasestromen (ia, ib) van de motor toegevoerd aan het Clarke-transformatieblok. De fasestromen van de motor worden door Clarke-transformatie omgezet in twee orthogonale stromen (iα, iβ). De nieuw omgezette fasestromen betekenen nu respectievelijk koppel-producerende en flux-producerende stromen. Hoewel we de fasestroom met succes hebben ontleed in flux- en koppelcomponenten, zijn ze nog steeds sinusvormig, wat het moeilijk maakt om ze te regelen omdat ze blijven veranderen.
De volgende taak van het FOC-algoritme is om de sinusgolven af te schaffen, waarvoor één belangrijke invoer nodig is:de rotorpositie. We zien in het diagram dat deze waarde ook naar het Park-transform blok wordt gestuurd. In dit blok is het de kunst om van een stationair referentieframe - vanuit het oogpunt van de stator - naar een roterend referentieframe vanuit het oogpunt van de rotor te gaan. Simpel gezegd zet het Park-transformatieblok de twee wisselstromen (iα, iβ) om in gelijkstroom. Dat maakt het vrij eenvoudig voor het PID-blok om het te regelen zoals het wil.
Laten we nu het PID-blok in beeld brengen. De invoer naar het PID-blok van het FOC-blok is Iq en Id, koppel en fluxcomponent. In de context van een EV krijgt het PID-blok een snelheidsreferentie wanneer de bestuurder gas geeft. Het PID-blok vergelijkt nu de twee waarden en berekent de fout. Deze fout is de waarde waarvoor het PID-blok de motor moet draaien. De output die het PID-blok geeft is Vq en Vd. Deze output bereikt de inverse Clarke en Park-transformatie waar precies het tegenovergestelde van Clarke en Park-transformatie plaatsvindt. Het inverse Park-transformatieblok transformeert het roterende referentieframe naar het stationaire referentieframe zodat hun fasen van motoren kunnen worden gecommuteerd.
klik voor afbeelding op volledige grootte
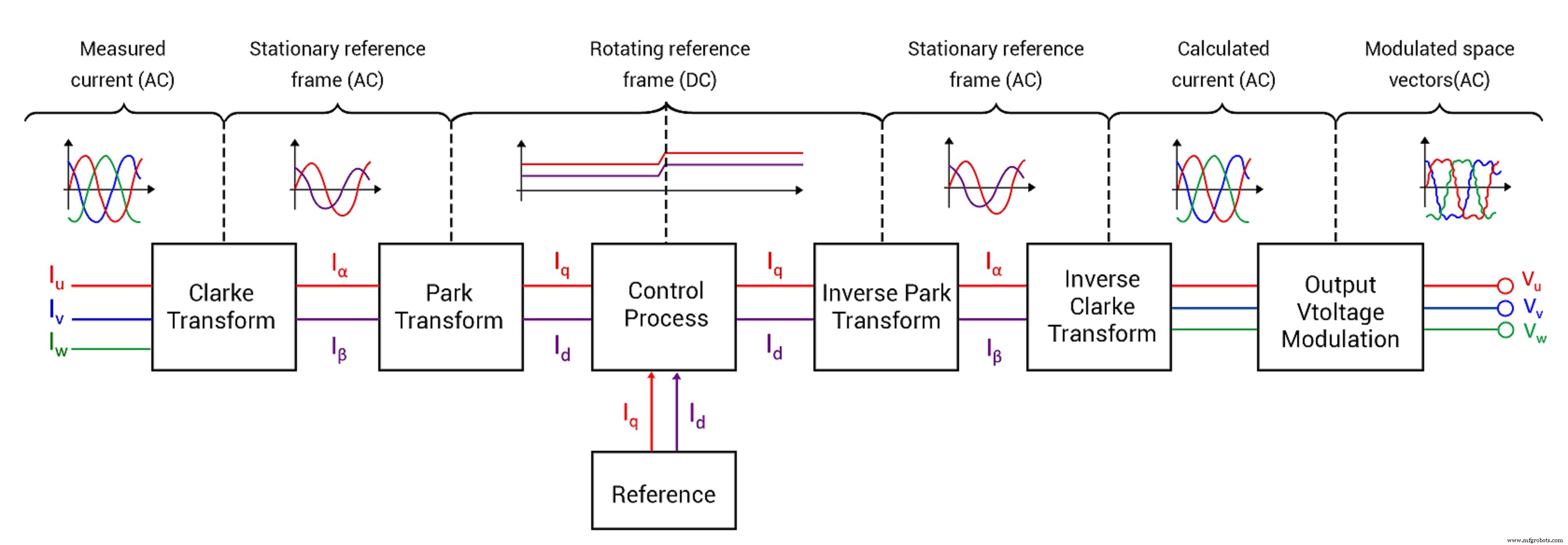
Figuur 2:De output van PID bereikt de inverse Clarke en Park-transformatie waar precies het tegenovergestelde van Clarke en Park-transformatie plaatsvindt. Bron:Texas Instruments
In de laatste stap van op FOC-algoritmen gebaseerde motorbesturing, neemt de rol van ruimtevectormodulatie (SVM) veel belang aan. De rol van SVM is het genereren van de PWM-signalen die naar de omvormer worden gevoerd, die op zijn beurt de driefasige spanning genereert die de motor aandrijft. In zekere zin doet SVM ook het werk van een inverse Clarke-transformatie.
Een driefasige omvormer heeft zes transistoren die de uitgangsspanning aan de motor leveren. Er zijn in wezen twee toestanden waarin deze uitgangen moeten zijn met ofwel de bovenste transistor gesloten en de onderste open of omgekeerd. Met twee standen en drie uitgangen, in totaal acht standen (2 3 ) kan worden berekend. Als je deze acht toestanden, ook wel basisvectoren genoemd, op een hexagonaal sterdiagram uitzet, zul je zien dat elke aangrenzende vector 60 graden uit elkaar ligt in termen van faseverschil. De SVM vindt de gemiddelde vector die de uitgangsspanning geeft (Vout ).
De facto EV-motorbesturing
FOC als motorbesturingsschema is onmisbaar voor EV-ontwerpen. Met het soort geruisloze en soepele motorwerking dat een EV vereist, onderscheidt FOC zich als een goede pasvorm. Veel OEM's en ontwikkelaars van besturingssystemen passen het standaard FOC-algoritme vaak aan om te voldoen aan de unieke vereisten van hun EV-programma, maar het kernconcept blijft hetzelfde.
De vooruitgang in MCU's voor auto's, zoals de PIC18Fxx39-familie van microcontrollers van Microchip of C2000 realtime microcontrollers van TI, kunnen de ontwikkeling van een FOC-algoritme voor EV-motorcontrolesystemen versnellen.
>> Dit artikel is oorspronkelijk gepubliceerd op onze zustersite, EDN .
 Vaibhav Anand is een digitale marketingmanager bij Embitel.
Vaibhav Anand is een digitale marketingmanager bij Embitel.  Saurabh S. Khobe is een embedded engineer bij Embitel.
Saurabh S. Khobe is een embedded engineer bij Embitel.
Verwante inhoud:
- Het oplossen van deterministische ontwerpuitdagingen voor motorbesturing met meerdere assen
- Veilig een EV-tractie-omvormer besturen
- Opkomende oplossingen verbeteren het energiebeheer van elektrische voertuigen
- Identificatie van vereisten voor E/E-ontwikkeling
- Motorcontroller integreert Arm Cortex-M0-kern
Abonneer u voor meer Embedded op de wekelijkse e-mailnieuwsbrief van Embedded.
Ingebed
- Toelatende en interlockcircuits
- Motorbesturingscircuits
- Softwaresuite vereenvoudigt ontwerpen voor motorbesturing
- Xilinx verbetert RFSoC-prestaties met digitale front-end harde IP voor 5G-radio's
- DATA MODUL:23,1-inch ultra-uitgerekt TFT-scherm met slimme bediening
- Maxim:bidirectionele stroomdetectieversterker met PWM-onderdrukking
- Motorcontroller integreert Arm Cortex-M0 core
- Lanner:voor virtulisatie geoptimaliseerde oplossing met multi-coreprocessor
- Blog:medische wearables met geweldige prestaties
- Draaibank Met CNC
- Waarom u op SEW-Eurodrive moet vertrouwen voor al uw behoeften op het gebied van motorbesturing