


Boltgestuurde robotauto
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Apps en online services
 |
| |||
 |
|
Over dit project
Disclaimer:
Er is geen elektronica beschadigd tijdens het maken van dit project.
Eerste bedrijf:Op een mooie dag...
We waren sinds de ochtend aan het werk en hadden nog veel documentatie en codetesten in handen en we hadden dringend een pauze nodig, maar tafelvoetbal spelen was niet ideaal omdat het ons uit de zone zou schoppen. Dus om onze kalmte te bewaren begonnen we na te denken over wat we zouden kunnen doen dat ons zou ontspannen, maar ons toch in die "zone van het werk" zou houden. Toen stelde onze manager voor:"Waarom maak je niet een klein projectje en zet het op Hackster?". Nou, goed gesprek Pranav.
Dus hebben we besloten om een internetgestuurde -wait-for-it- RC-robot te maken met een kleine bonusfunctie (die we later zullen onthullen omdat spanning belangrijk is).

Oké, dus we waren opgepompt en haastten ons naar de interne ijzerhandel.
Tweede bedrijf:The Forest of Hardware
We komen aan bij de ijzerhandel, het is gevuld met kits en componenten die je ogen laten glanzen van hebzucht, je handen worden ernaartoe getrokken en voor je het weet soldeer je onderdelen om een 8-bits rekenmachine te maken, maar we waren gefocust en lieten deze afleiding ons niet dwingen en we pakten gewoon wat we nodig hadden (zo zou jij ook moeten)
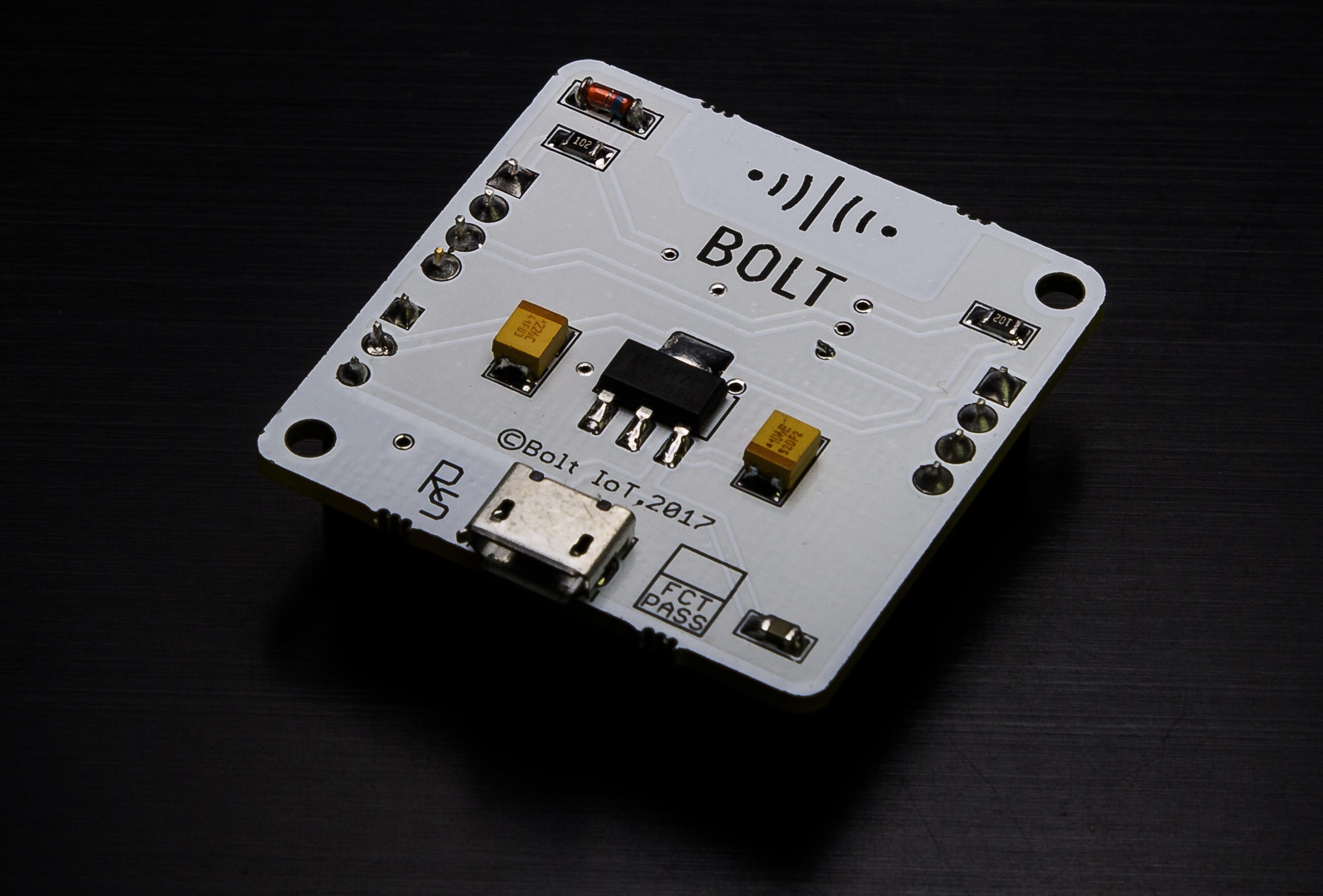
1. Bout wifi-module

2. Basis robotkit

3. Arduino UNO of Boltduino


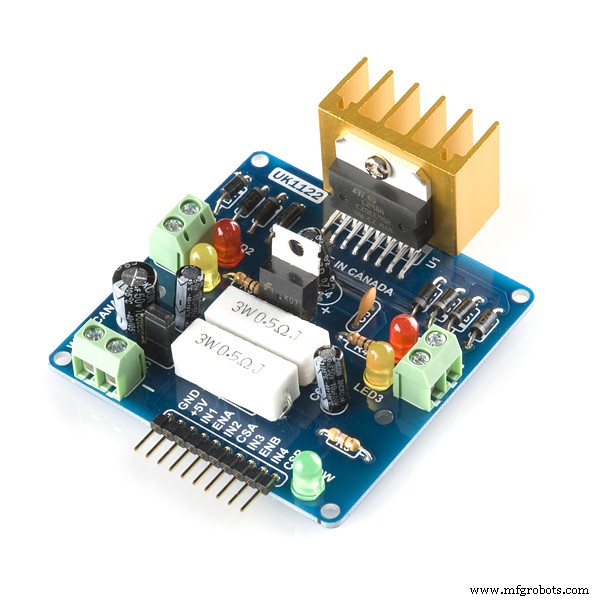
4. L298N Motoraandrijfscherm

5. Nabijheidssensor

6. Doorverbindingsdraden

7. Stroomadapter

Akte drie:smeden
We kwamen veilig terug uit het Forest of Hardware met alle onderdelen die we nodig hadden. Het was tijd voor Devashish, de opperheer van hardware, om zijn magie te gebruiken en deze kleine robot in elkaar te zetten.

Hier is hoe hij dit deed.
De hardware in elkaar zetten
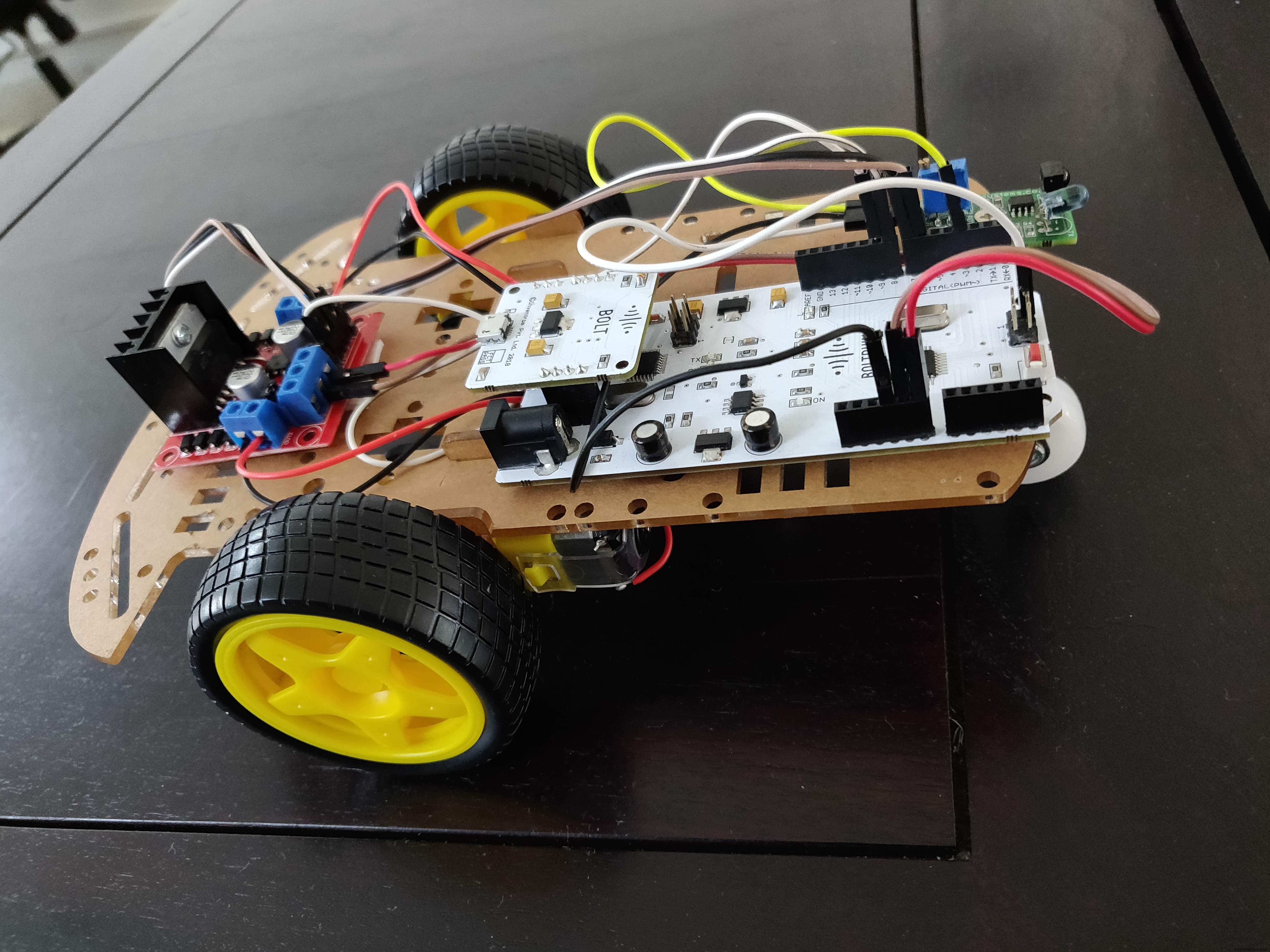
1. Bevestig het zwenkwiel in het voorste middelste gedeelte van het chassis zoals afgebeeld.
2. Monteer het chassis van de robotauto en bevestig de twee gelijkstroommotoren met behulp van de bouten en moeren samen met de meegeleverde wielen, zoals afgebeeld.
OPMERKING:Soldeer de draden aan de motorklem voordat u deze aan het chassis bevestigt.
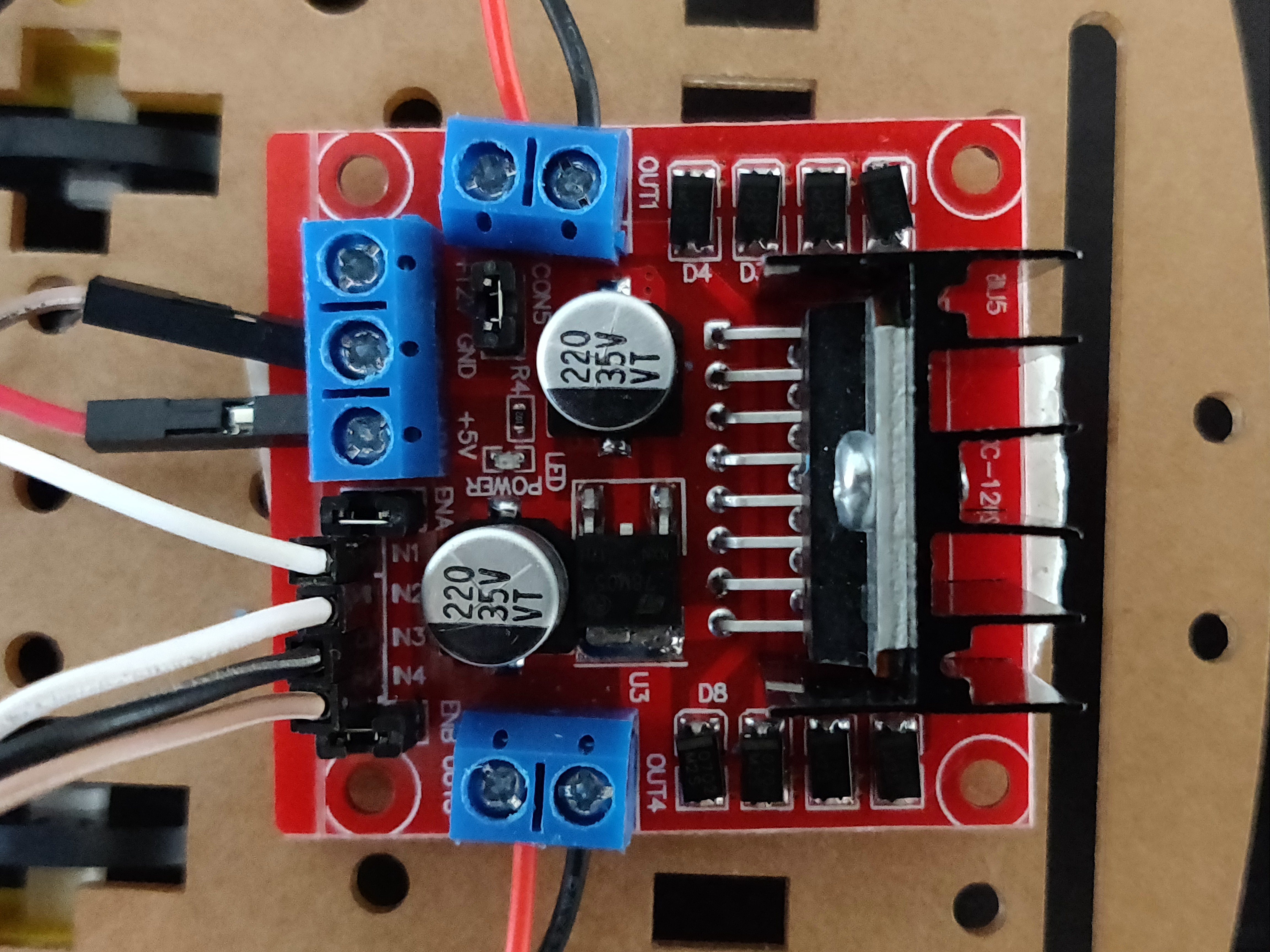
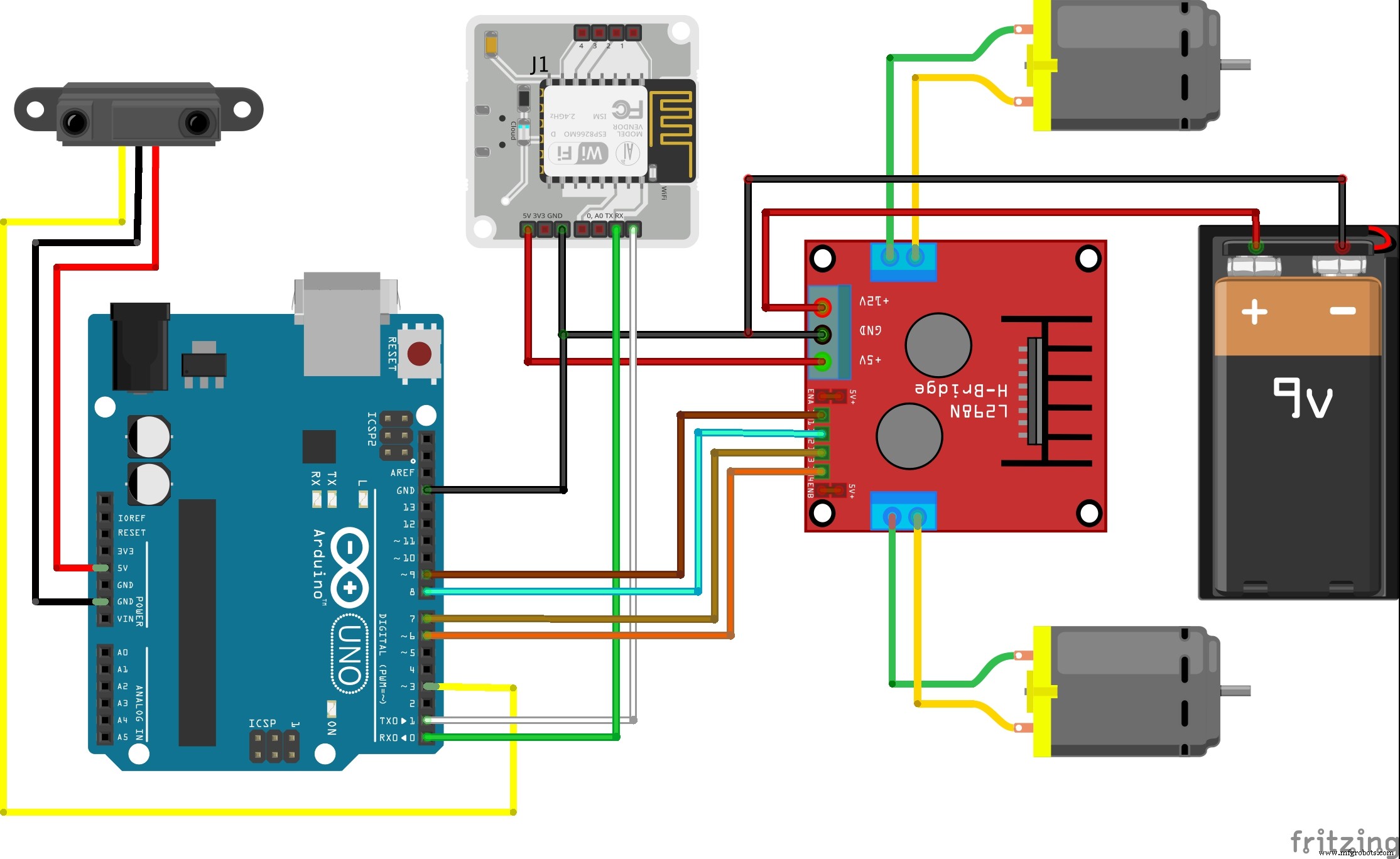
3. Sluit nu de klemmen van de motor aan op de L298N-motorbesturingsmodule zoals hieronder weergegeven.
OPMERKING:Sluit beide terminals van de motor aan op dezelfde kant van de drivermodule.
4. Verbind de 5V-pin en GND-pin van de drivermodule met respectievelijk 5V en GND van Arduino.
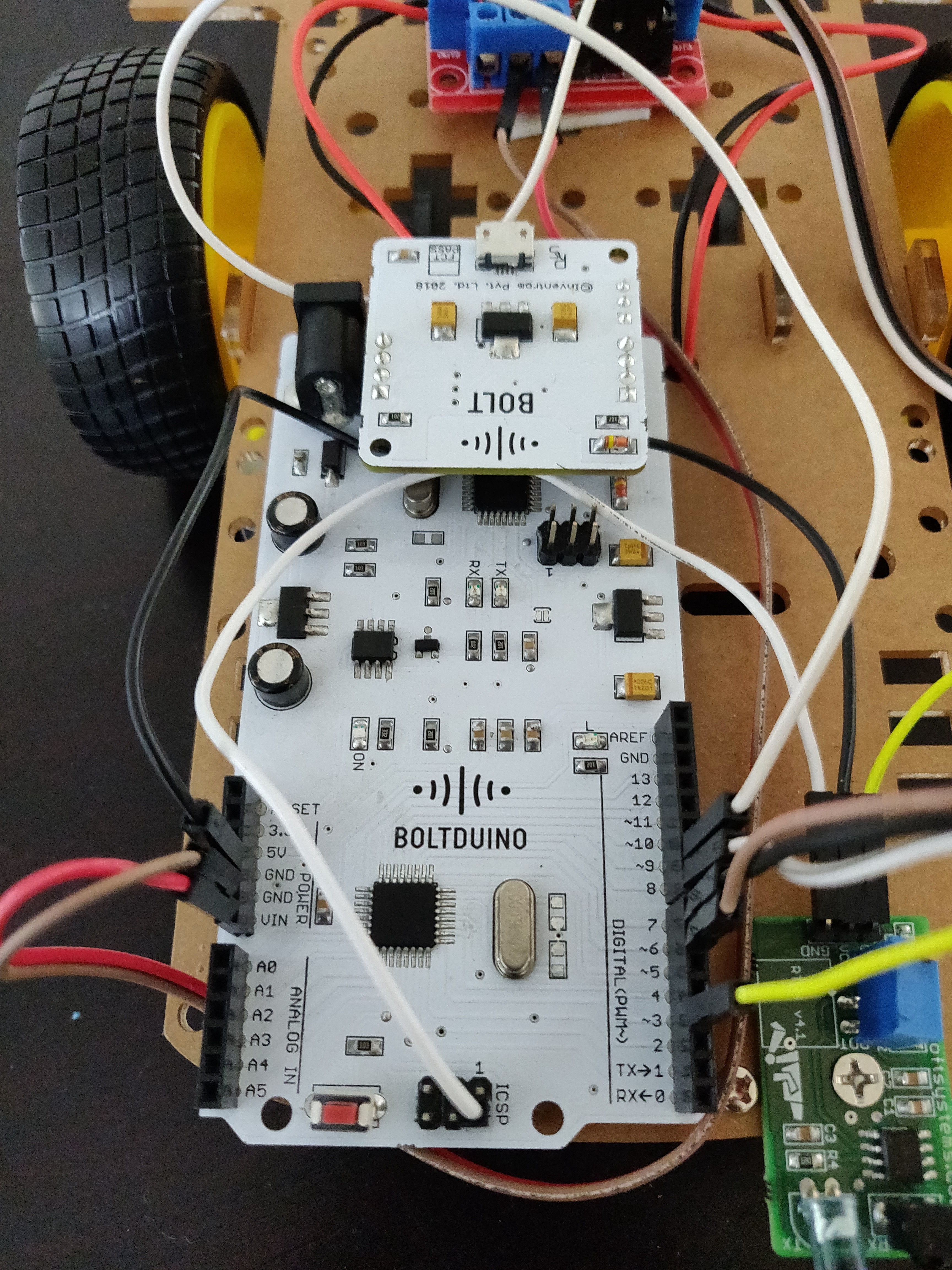
5. Verbind de pinnen 5V, GND, Tx en Rx van Bolt met respectievelijk de pinnen 5V, GND, Rx en Tx van Arduino. Bevestig voor Boltduino de Bolt-eenheid in de aanwezige sleuf.
6. Verbind de vier ingangsklemmen (IN1, IN2, IN3, IN4) met respectievelijk pinnen 6, 7, 8 en 9.
7. Verbind de 5V-, GND- en OUT-pinnen van de naderingssensor met respectievelijk de pinnen 5V, GND en 3 van Arduino.


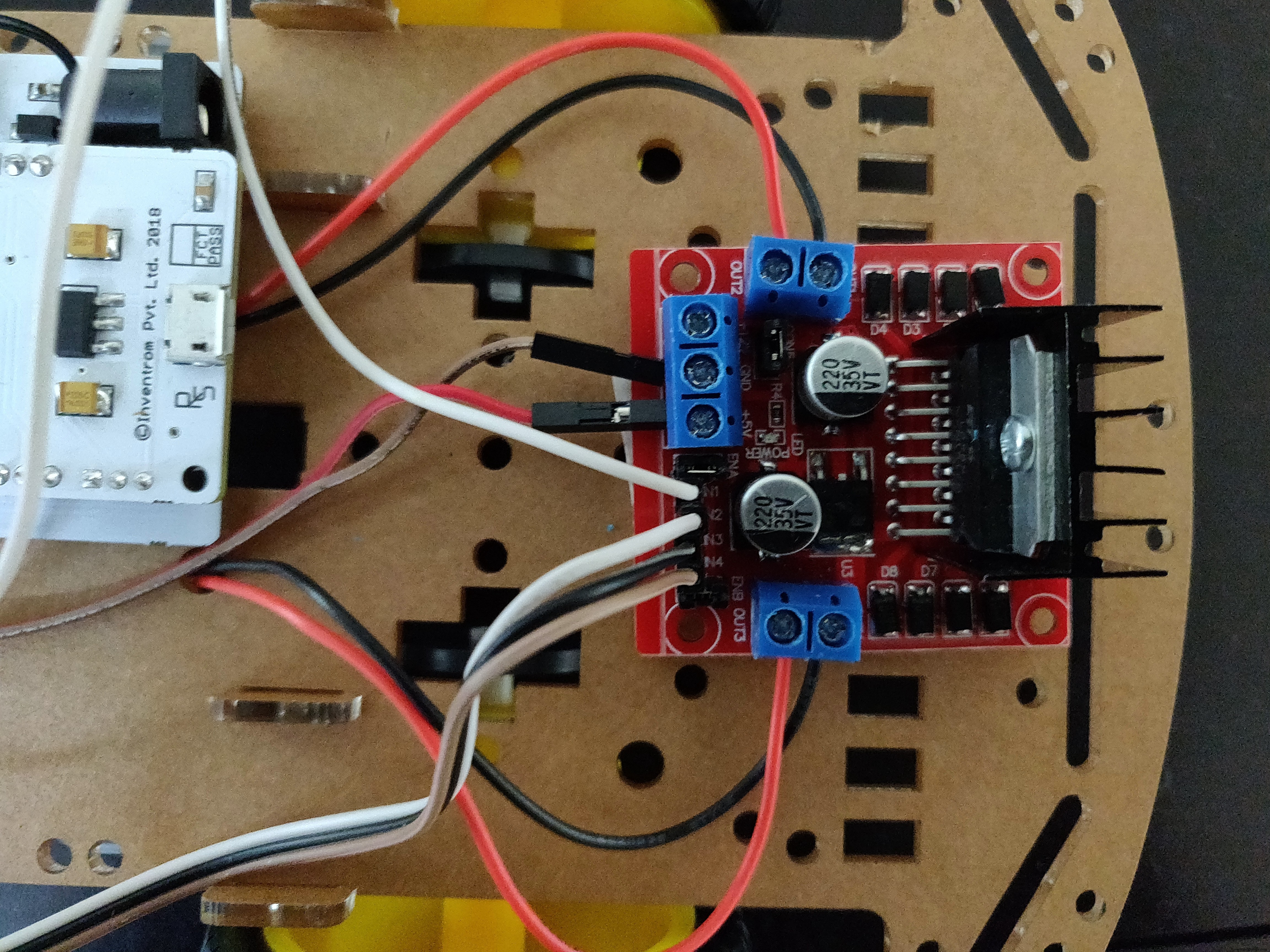
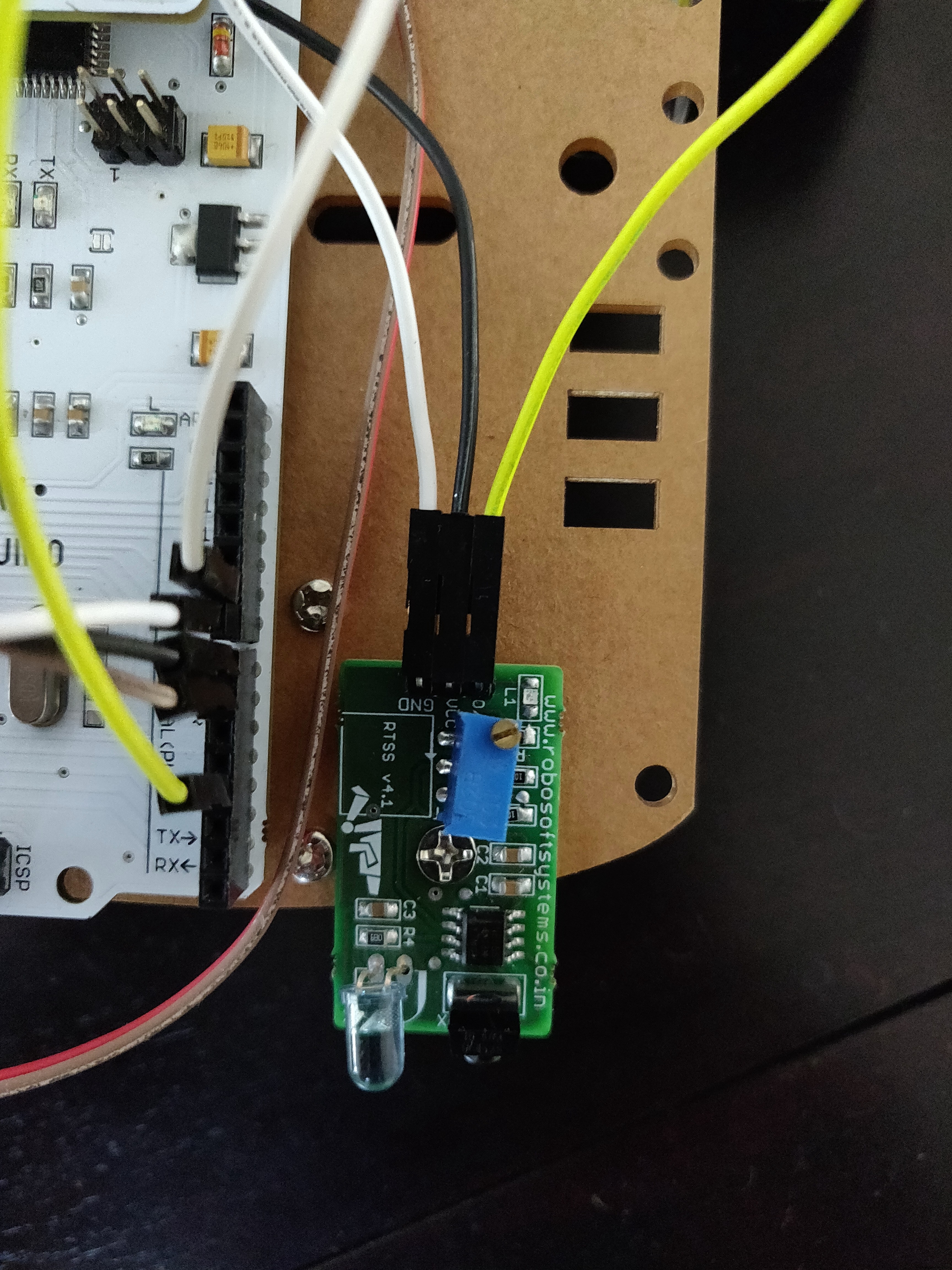
OPMERKING:voor elke meer hulp bij het bekijken van de onderstaande schema's.
Bolt verbinden met cloud
Nadat u de hardware heeft gemonteerd, registreert u de Bolt-eenheid en verbindt u deze met de Bolt Cloud. Kom meer te weten over het registreren en verbinden van bout met cloud.
Vierde bedrijf:en toen was er connectiviteit
Nu stuurde de Highlord of Hardwarey de Assassin of Kiln of Code (d.w.z. mij).
Hij kreeg de taak om deze robot tot leven te brengen met zijn code en deze te verbinden met de cloud. Treed in zijn voetsporen om ook uw robot aan het werk te krijgen.
Stap 1: Krijgen de code.
Haal de code uit de Github-repository van dit project. Download een.zip-bestand of kloon het naar uw systeem, wat u maar wilt.
Stap 2: Werken met de code.
Er zijn twee delen van de code:
- Een map met de naam app
- In deze map bevinden zich twee bestanden i. controller.html ii. controller.js. We zullen er later over praten.
- Dan is er de firmware voor je Arduino in een bestand met de naam Bolt_Robot_Car.ino . Dit wordt geflitst/geupload op je Arduino.
Stap 3: Instelling omhoog Arduino.
Zodra u klaar bent met het instellen van uw hardware en het aansluiten van uw bout op de cloud, uploadt u de firmware die aanwezig is in het bestand Bolt_Robot_Car.ino naar uw Arduino. Volg deze link om te weten hoe je Arduino IDE instelt en een code uploadt naar Arduino.
Stap 4: De Controller App.
Dubbelklik op de controller.html bestand en u zou de volgende webpagina moeten zien.
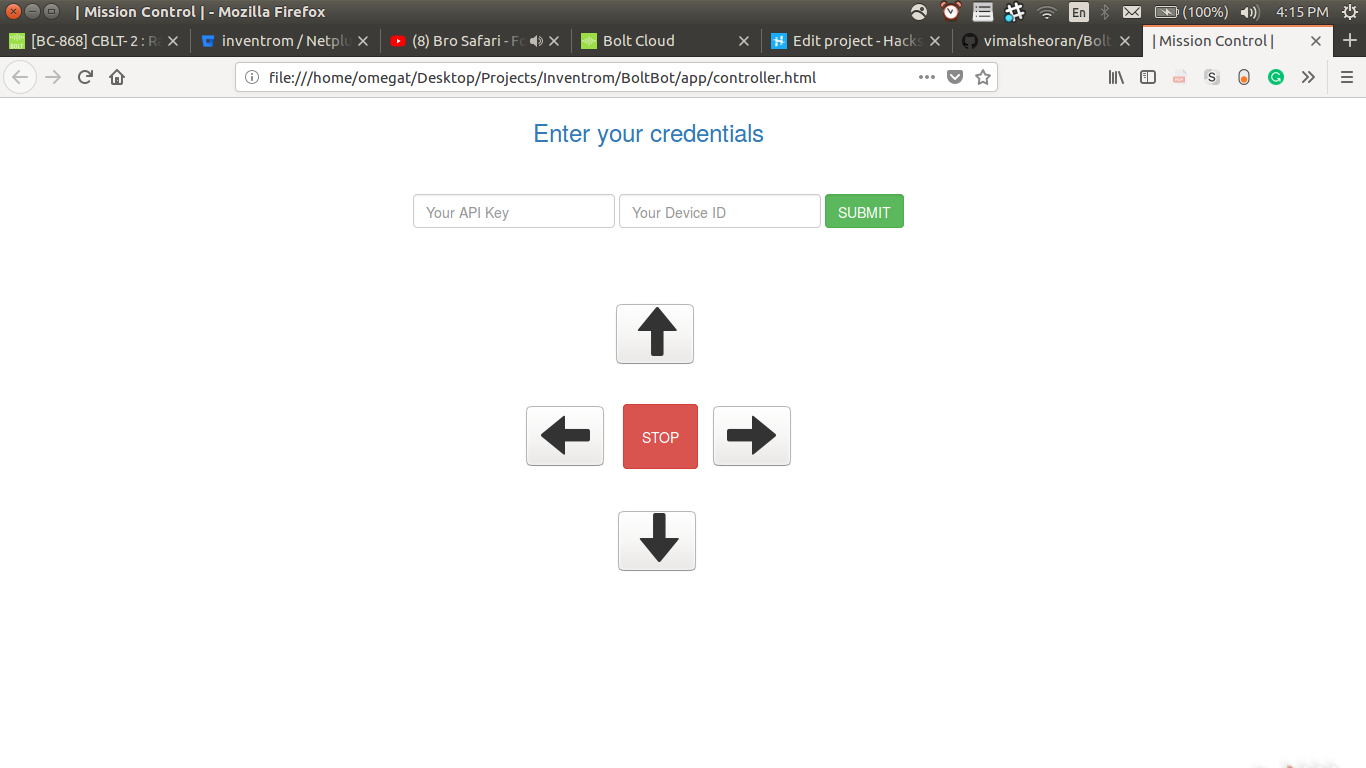
Voer nu uw API-sleutel in en Apparaat-ID in hun respectievelijke velden en druk op VERZENDEN. U kunt uw API-sleutel krijgen en Apparaat-ID vanaf uw Bolt Cloud-dashboard.
Hierna kunt u de bedieningsknoppen gebruiken om de beweging van uw robot te besturen. De druk op de knop activeert specifieke JavaScript-functies (controleer bestand controller.js ) om opdrachten naar de Bolt Cloud en vervolgens naar uw Bolt WiFi-module te sturen. Nu heb je een RC-bot die ermee kan doen wat je wilt. Hier kunnen meerdere dingen mee gedaan worden, je kunt er een paar sensoren aan hangen of automatisch laten maken of wat je maar wilt. En maak je geen zorgen als je het verprutst, wij, de inwoners van het Maker Land, zijn er om je op elk moment te helpen.
Vijfde bedrijf:paaseieren
Ik weet dat enkelen van jullie misschien denken:"Hé, je zei dat er een bonusfunctie was, waar is die?" maak je geen zorgen, we zullen je niet hoog en droog achterlaten, maar de kans is groot dat je de functie in ActThree:Forging al hebt opgemerkt als je dat niet hebt gedaan, kijk er dan nog eens naar. Maar goed, wie heeft er zoveel tijd, dus TL;DR je robot stopt automatisch als hij een obstakel of een blokkade op zijn pad tegenkomt, zodat je hem niet tegen de muur knalt. Oké, dat is het einde van dit verhaal, bekijk deze video om de video-tutorial voor dit project te bekijken.
Demo:
Code
BoltBot
https://github.com/vimalsheoran/BoltBotSchema's
Productieproces
- Belangrijkste onderdelen van een auto en hun functies
- Raspberry Pi-robot bestuurd via Bluetooth
- Gebaargestuurde robot met Raspberry Pi
- RASPBERRY PI WIFI ROBOT GECONTROLEERD VANAF ANDROID SMART PHONE
- Windows 10 IoT Core:spraakgestuurde robot
- Wifi-gestuurde robot met Raspberry Pi
- ROObockey:op afstand bestuurbare, door het doel ondersteunde straathockeyrobot
- Met joystick bestuurde RC-auto
- Spraakgestuurde robot
- Robotarm bestuurd via Ethernet
- MobBob:doe-het-zelf Arduino-robot bestuurd door Android-smartphone