


Zet je RC-auto om naar Bluetooth RC-auto
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 1 |
Benodigde gereedschappen en machines
 |
|
Apps en online services
| |
|
Over dit project




RC-auto's zijn echt leuk om te hacken en ze bieden een goed chassis voor een lage prijs, om robots te maken, maar het kiezen van een om te maken is lastig met miljoenen typen. Mijn kleine broertje was onlangs jarig en ik wilde hem iets heel cools geven, uiteindelijk heb ik hem deze rc-auto gegeven. Het hacken van RC-auto's is ook gemakkelijk en moeilijk, vanwege de verschillende manier waarop rc-auto's worden gemaakt, is het geen gemakkelijke en gedefinieerde manier om de auto te hacken, maar deze hack is universeel. Ik zal ook proberen de basis te leggen over alle onderdelen en theorie achter elke module. We hebben de module gebruikt, maar je wordt aangemoedigd om ons circuit te maken, behalve de pro mini.
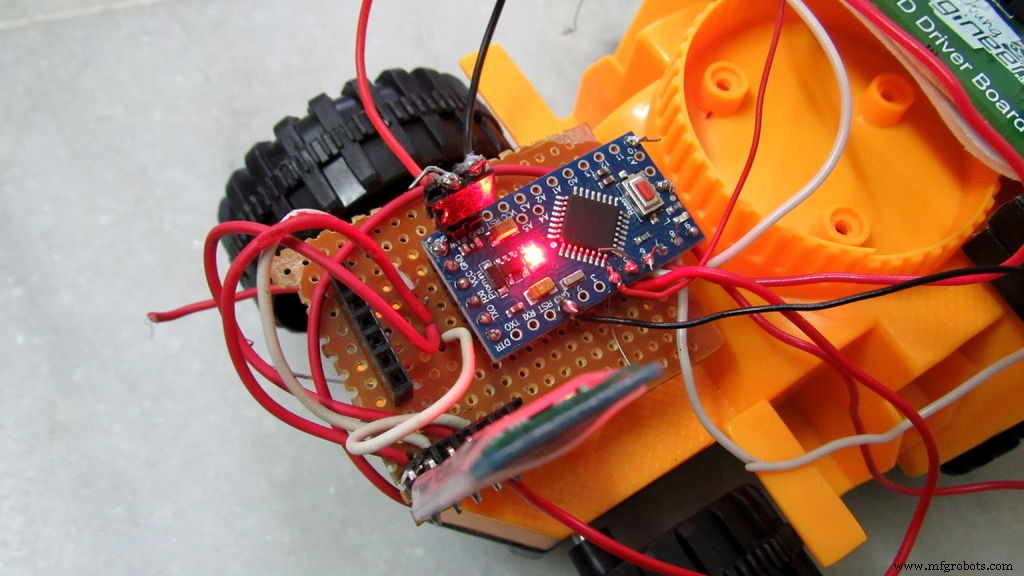
Ik voelde me echt ongemakkelijk bij promini omdat het te klein was, maar het was leuk.
Bekijk de video en abonneer je op toekomstige video's
Stap 1:Het juiste chassis krijgen



Onderdelenlijst
- ProMini
- L293d-module
- hc-05
- Rc-auto
Het juiste chassis krijgen
Het chassis kiezen is een kwestie van aandrijfmechanisme, er zijn veel aandrijfmechanismen.
Laten we het hebben over de twee meest populaire mechanismen.
Differentiële aandrijving Wat is differentiële aandrijving?
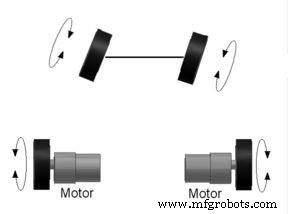
De term differentieel betekent verschil tussen twee entiteiten, in de context van robotica is het gewoon het snelheidsverschil tussen twee motoren. Op basis van dit snelheidsverschil kan een robot op een 2D-layout in elke richting worden bewogen.
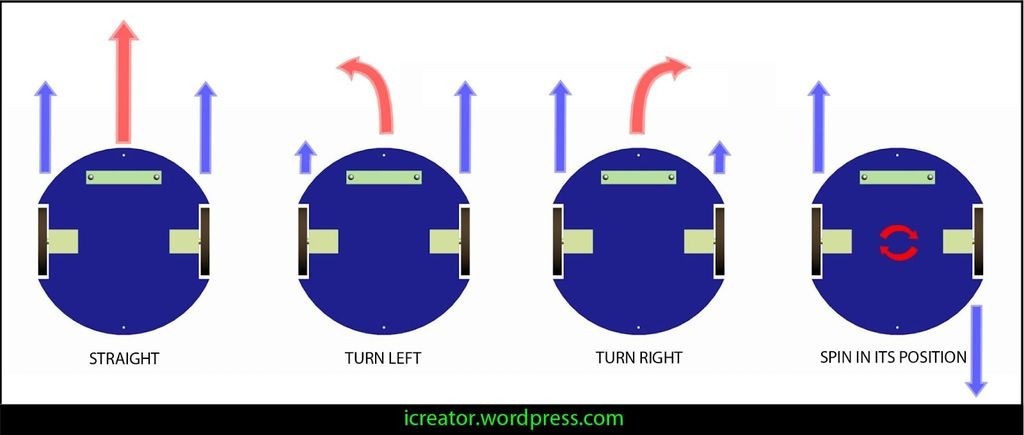
Wanneer twee motoren in één lijn met wielen zijn verbonden, tegenover elkaar (net als een paar wielen die op een enkele as zijn aangesloten), bepaalt de snelheid waarmee elke motor draait de bewegingsrichting. Wanneer beide wielen met dezelfde snelheid draaien, is het verschil tussen de motoren nul. Hierdoor beweegt de robot in een rechte lijn vooruit. De robot kan in omgekeerde richting bewegen als de draairichting van beide motoren wordt omgekeerd. Dit zal weer in een rechte lijn zijn als het snelheidsverschil nul is. Nu zal het veranderen van de snelheid van een motor resulteren in beweging in een richting weg van de rechte lijn. Het verlagen van de snelheid van de rechtermotor zal bijvoorbeeld resulteren in een snelheidsverschil en dus een verandering van richting. De resulterende kracht is zodanig dat de robot naar rechts draait. Deze richtingsverandering kan in de gewenste hoek worden geregeld door de snelheid van de motor verder te verlagen. Langzamer is de juiste motor, scherper is de bocht naar rechts. Dit is precies hetzelfde voor Linksaf.
Als conclusie:Langzamere motor rechts, scherpere bocht naar rechts. Langzamere motor naar links Scherpere bocht naar links. Hieronder staan enkele scenario's die de werking van het differentieel aandrijfmechanisme verklaren. M1 en M2 zijn motoren die respectievelijk links en rechts wielen aandrijven.
Stuurtype rijden
Wat is een stuurtype aandrijving?
De aandrijving van het autotype komt het meest voor in de echte wereld, maar niet in de robotwereld. Het wordt gekenmerkt door een paar aandrijfwielen en een afzonderlijk paar stuurwielen. De translatie en rotatie zijn onafhankelijk van elkaar. Maar translatie en rotatie zijn met elkaar verbonden, vandaar dat dit systeem wordt geconfronteerd met een ernstig probleem met de padplanning. Vier wielen zijn efficiënter in vergelijking met drie of twee wielen. De eerste twee van de vier wielen kunnen worden gebruikt om te sturen en de volgende twee om de robot aan te drijven. Het balanceren van een vierwielige robot is nooit een probleem. De meeste alledaagse auto's die we gebruiken zijn vierwielig en het voorbeeld is genoeg om het bestaan en de mogelijkheden ervan te bewijzen.
Nadelen van autotype rijden :Het draaimechanisme moet nauwkeurig worden aangestuurd. Een kleine onnauwkeurigheid kan grote odometriefouten veroorzaken Het systeem is niet-holonomisch, vandaar dat padplanning uiterst moeilijk en onnauwkeurig is Er zijn geen directe directionele actuatoren
Het is dus beter om differentiële aandrijving te gebruiken vanwege de eenvoud en het gebruiksgemak.
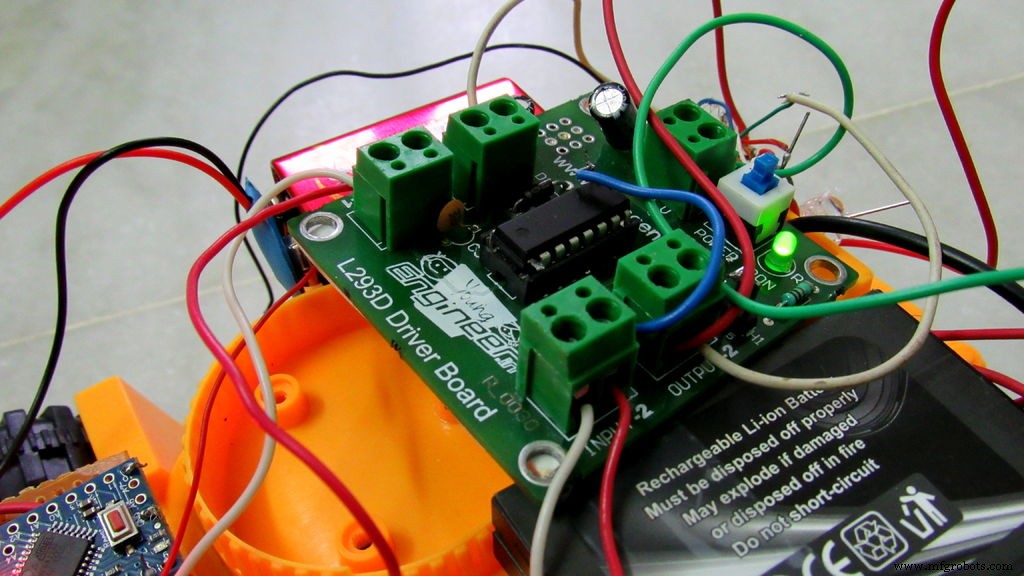
Stap 2:Aansturing van de motoren
Om de motor te besturen hebben we iets nodig dat de motor driver wordt genoemd.
Wat is een motorrijder?
Een motordriver is een kleine stroomversterker; de functie van motorbestuurders is om een stuursignaal met een lage stroomsterkte te nemen en dit vervolgens om te zetten in een signaal met een hogere stroomsterkte dat een motor kan aandrijven.
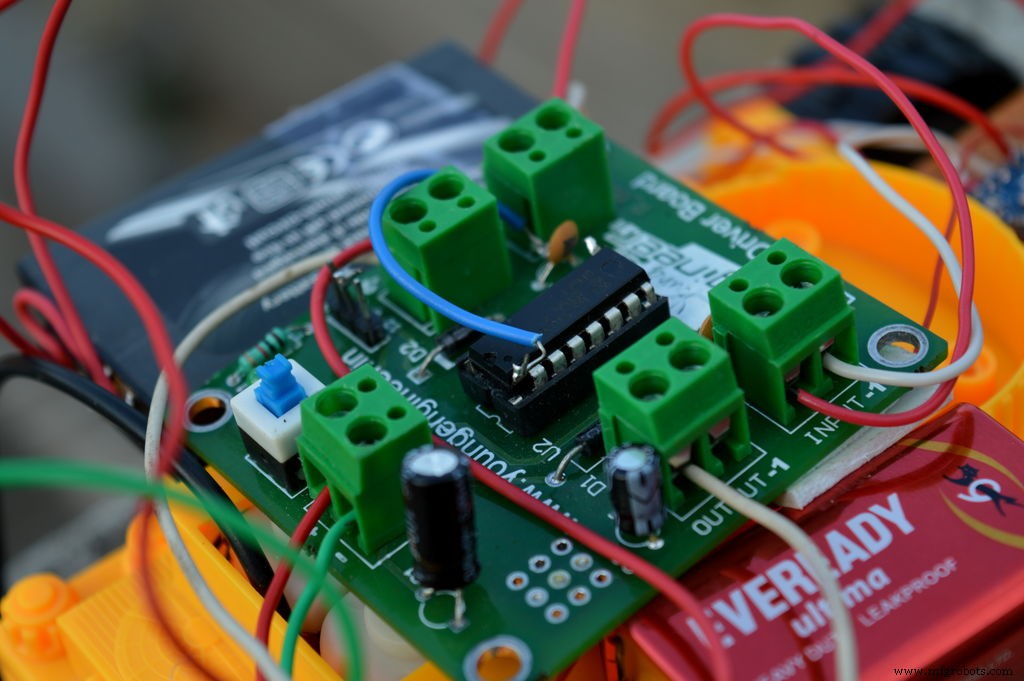
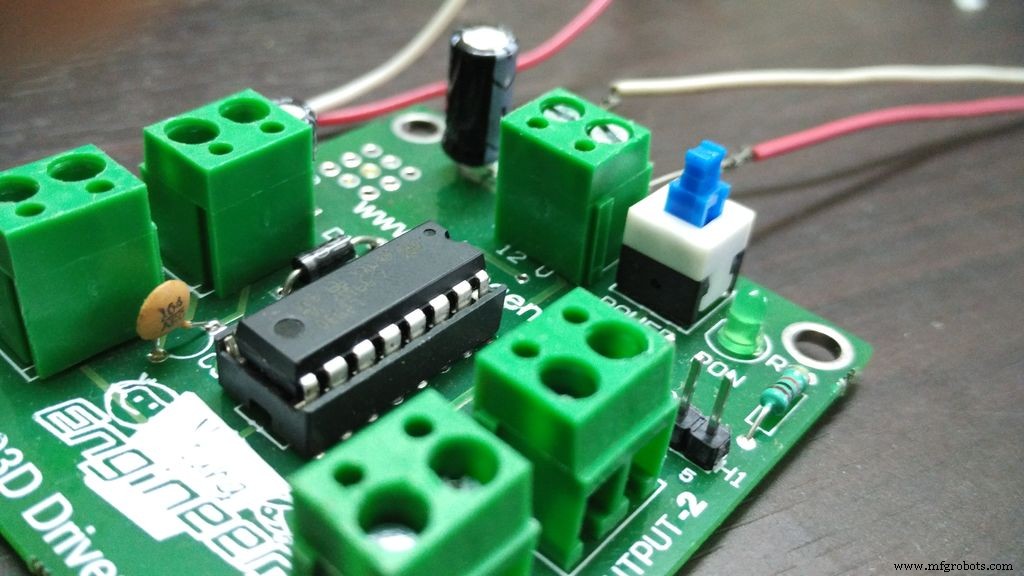
Er zijn veel motordrivers waarvan ik de l293d motordrivermodule gebruik.
L293D is een geïntegreerd circuit voor motorbesturing dat wordt gebruikt om gelijkstroommotoren aan te drijven die in beide richtingen draaien. Het is een 16-pins IC die een set van twee gelijkstroommotoren tegelijk kan aansturen. De L293D gebruikt 5V voor zijn eigen stroomvoorziening en er is een externe stroombron nodig om de motoren aan te drijven, die tot 36V kunnen bedragen en tot 600mA kunnen trekken. De L293D werkt volgens het concept van de typische H-brug, een circuit waarmee de hoogspanning in beide richtingen kan worden gevlogen. In een enkele L293D IC bevinden zich twee H-brugcircuits die twee gelijkstroommotoren onafhankelijk van elkaar kunnen laten draaien.
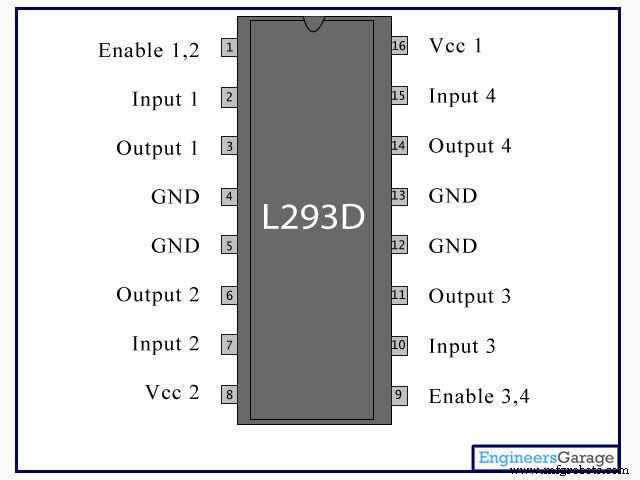
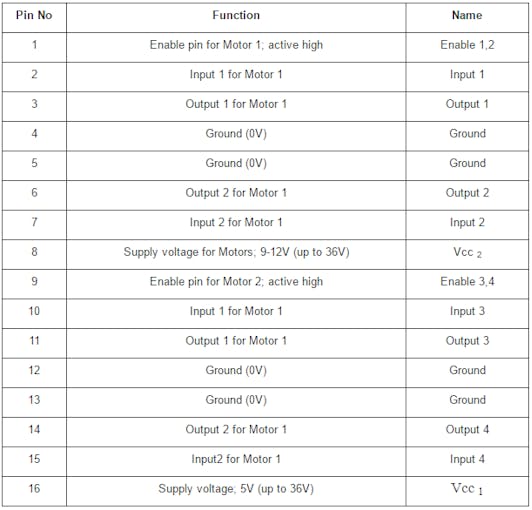
Beschrijving van L293d vastzetten
1Activeer pin voor Motor 1; actief hoog Inschakelen 1,2 2 Ingang 1 voor Motor 1 Ingang 1 3 Uitgang 1 voor Motor 1 Uitgang 1 4 Aarde (0V) Aarde 5 Aarde (0V) Aarde 6 Uitgang 2 voor Motor 1 Uitgang 2 7 Ingang 2 voor Motor 1 Ingang 2 8 Voedingsspanning voor motoren; 9-12V (tot 36V) Vcc 2 9 Pin inschakelen voor Motor 2; actief hoog Inschakelen 3,4 10 Ingang 1 voor Motor 1 Ingang 3 11 Uitgang 1 voor Motor 1 Uitgang 3 12 Aarde (0V) Aarde 13 Aarde (0V) Aarde 14 Uitgang 2 voor Motor 1 Uitgang 4 15 Ingang2 voor Motor 1 Ingang 4 16 Voedingsspanning; 5V (tot 36V) Vcc 1
Stap 3:Over de app
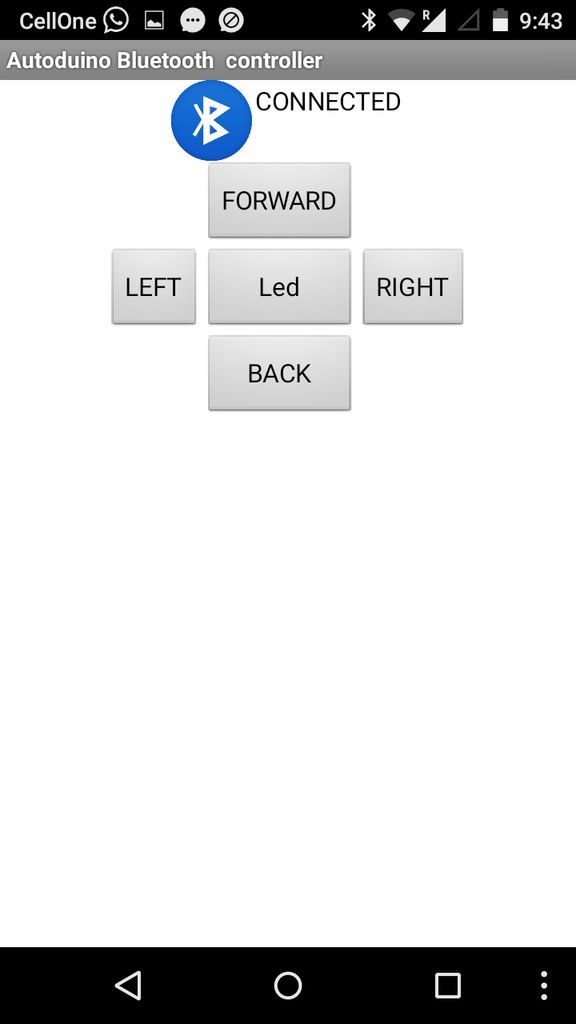


Er zijn veel apps om te bedienen die ik met één heb gemaakt. De logica is heel eenvoudig, alle knoppen sturen een teken wanneer ze worden ingedrukt via Bluetooth en de arduino verwerkt het.
Karakterfuncties
X Nultoestand F Voorwaartse beweging B Achterwaartse beweging L Draai naar links R Draai naar rechts
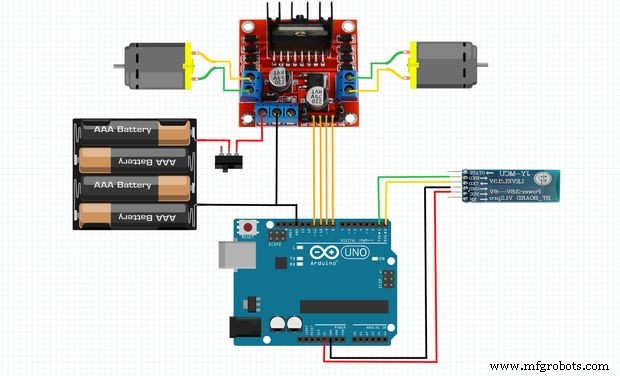
Stap 4:Sluit alle onderdelen aan
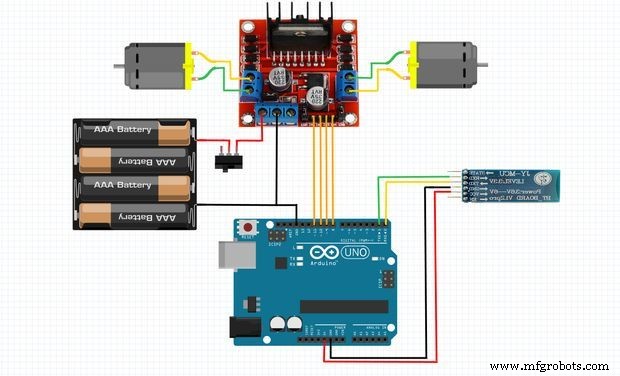

Verbindingen zijn eenvoudig
hier zijn de verbindingen als volgt
De Bluetooth-module
Hc-05 Arduino Vcc 5v Gnd Gnd Rx Tx Tx Rx
De motorrijder
Motor Driver Arduino pin 2 8 pin 7 7 pin 10 6 pin 4 9 pin 3 en 6 Motor 1 pin 11 en pin 14 Motor 2 pin 1 5v pin 9 5v
Stap 5:Coderen


void setup() {Serial.begin(9600);pinMode(8, OUTPUT);pinMode(7, OUTPUT);pinMode(9, OUTPUT);pinMode(6, OUTPUT); pinMode (5, UITGANG); pinMode (4, UITGANG); digitalWrite(4,LAAG); digitalWrite(5,LOW);}// de loop-functie wordt keer op keer uitgevoerd forevervoid loop() {var=Serial.read();if(var=='F'){digitalWrite(6,LOW);digitalWrite( 7,HOOG);digitalWrite(8,LAAG);digitalWrite(9,HOOG);} if(var=='H'){ digitalWrite(frled1,HIGH);}if(var=='B'){ analogWrite( versnellen,150); digitalWrite(6,HOOG);digitalWrite(7,LAAG);digitalWrite(8,HOOG);digitalWrite(9,LAAG); digitalWrite(bcled1,HIGH);}if(var=='X'){digitalWrite(9,LOW);digitalWrite(8,LOW);digitalWrite(7,LOW);digitalWrite(6,LOW); digitalWrite(frled1,LOW); digitalWrite(bcled1,LOW );}if(var=='L'){digitalWrite(6,LOW);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW);}if(var =='R'){digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,LOW);digitalWrite(9,LOW);;}} Ik hoop dat je het leuk vindt om het project te maken zoals ik heb gedaan. Ik plaats binnenkort nog meer coole projecten, dus volg me om alle updates te krijgen. Like ook mijn pagina https://www.facebook.com/makewithRex/
F09ZCJSIP2UG2XP.ino
Code
- Codefragment #1
Codefragment #1Platte tekst
void setup() { Serial.begin(9600); pinMode (8, UITGANG); pinMode (7, UITGANG); pinMode(9, UITGANG); pinMode (6, UITGANG); pinMode (5, UITGANG); pinMode (4, UITGANG); digitalWrite(4,LAAG); digitalWrite(5,LOW);}// de loop-functie wordt steeds opnieuw uitgevoerd forevervoid loop() { var=Serial.read(); if(var=='F') {digitalWrite(6,LOW);digitalWrite(7,HIGH);digitalWrite(8,LOW);digitalWrite(9,HIGH); } if(var=='H') {digitalWrite(frled1,HIGH); } if(var=='B') { analogWrite(speeden,150); digitalWrite(6,HOOG);digitalWrite(7,LAAG);digitalWrite(8,HOOG);digitalWrite(9,LAAG); digitalWrite(bcled1,HIGH); } if(var=='X') {digitalWrite(9,LOW); digitalWrite (8, LAAG); digitalWrite(7,LAAG); digitalWrite(6,LAAG); digitalWrite(frled1,LOW); digitalWrite(bcled1,LOW ); } if(var=='L') {digitalWrite(6,LOW);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW); } if(var=='R') {digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,LOW);digitalWrite(9,LOW);; }} Schema's
Productieproces
- C# Constructor
- Verander je Raspberry Pi in een Hamster Fitness Tracker
- Je smartphone en de connected car
- Hoe u van uw toeleveringsketen een winstcentrum maakt
- Hoe u uw creatieve ontwerpen kunt omzetten in echt?
- Hoe u uw auto-airco in een paar stappen kunt repareren
- Hoe kiest u een turbolader voor uw auto?
- Hoe de deurklink van uw auto te repareren?
- Hoe u uw auto-airconditioner kunt opladen
- Hoe roest op uw auto repareren?
- Waarom moet u de motorolie van uw auto verversen?