


Hoe borstelloze motor en ESC werken
In deze tutorial zullen we leren hoe borstelloze motor en ESC werken. Dit artikel is het eerste deel van de volgende video, waar we het werkingsprincipe van een borstelloze gelijkstroommotor en ESC (elektronische snelheidsregelaar) zullen leren, en in het tweede deel zullen we leren hoe we de BLDC-motor kunnen besturen met behulp van Arduino.
Je kunt de volgende video bekijken of de schriftelijke tutorial hieronder lezen.
Hoe het werkt
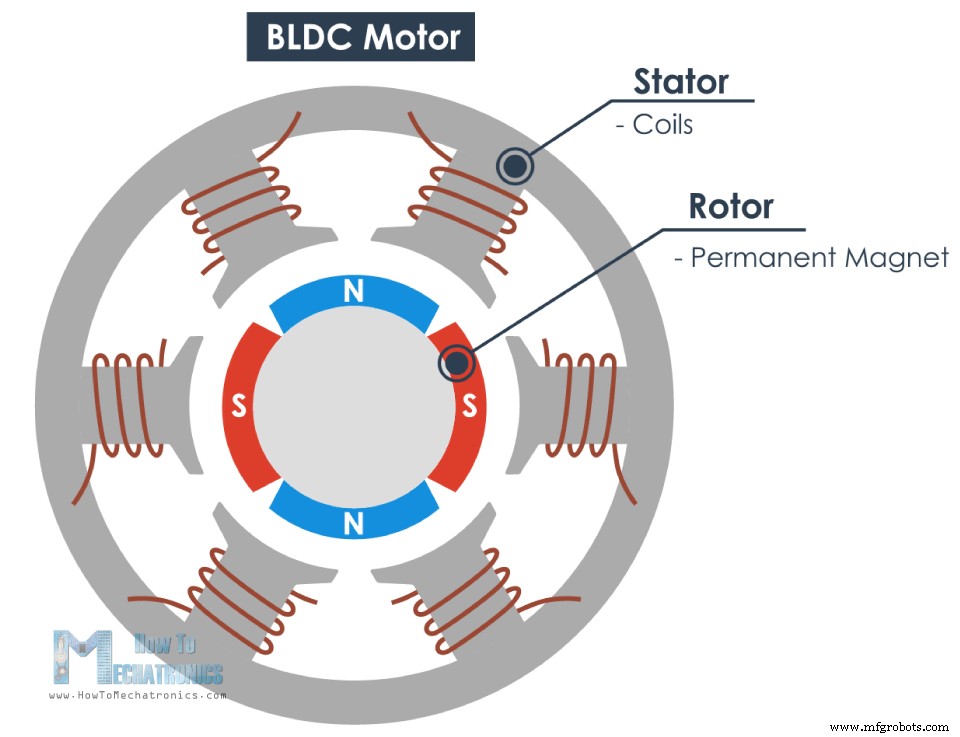
Een BLDC-motor bestaat uit twee hoofdonderdelen, een stator en een rotor. Voor deze illustratie is de rotor een permanente magneet met twee polen, terwijl de stator bestaat uit spoelen die zijn gerangschikt zoals weergegeven in de onderstaande afbeelding.
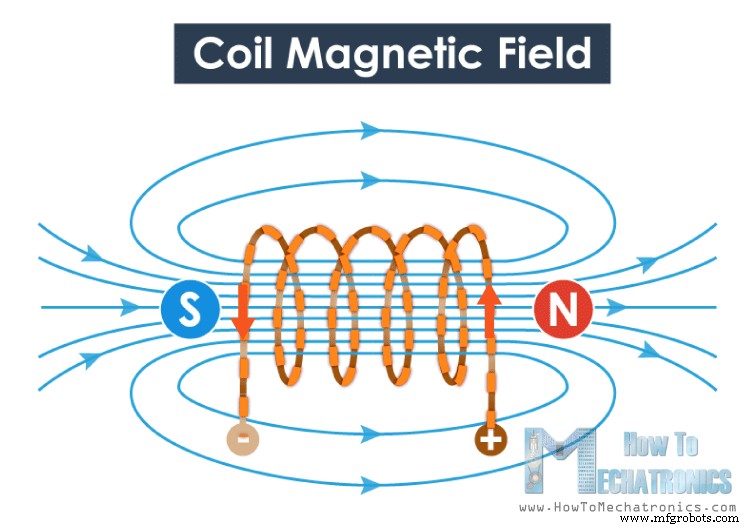
We weten allemaal dat als we stroom door een spoel voeren, deze een magnetisch veld zal genereren en dat de magnetische veldlijnen of de polen afhankelijk zijn van de stroomrichting.
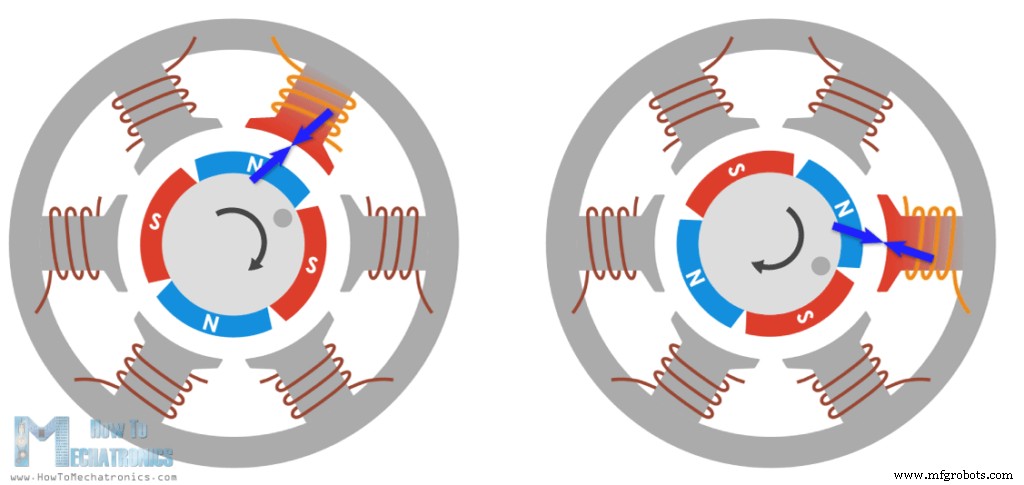
Dus als we de juiste stroom toepassen, zal de spoel een magnetisch veld genereren dat de permanente magneet van de rotor zal aantrekken. Als we nu elke spoel na elkaar activeren, blijft de rotor draaien vanwege de krachtinteractie tussen permanent en de elektromagneet.
Om de efficiëntie van de motor te vergroten, kunnen we twee tegenovergestelde spoelen als een enkele spoel wikkelen op een manier die tegengestelde polen zal genereren ten opzichte van de polen van de rotor, dus we zullen een dubbele aantrekkingskracht krijgen.
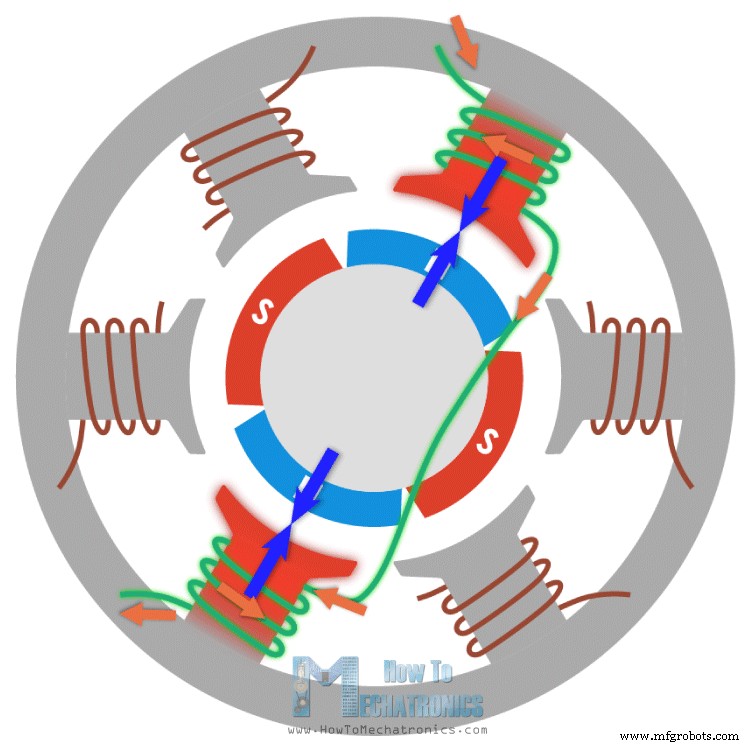
Met deze configuratie kunnen we de zes polen op de stator genereren met slechts drie spoelen of fase. We kunnen het rendement verder verhogen door twee spoelen tegelijk te bekrachtigen. Op die manier zal de ene spoel de rotor aantrekken en de andere spoel de rotor afstoten.
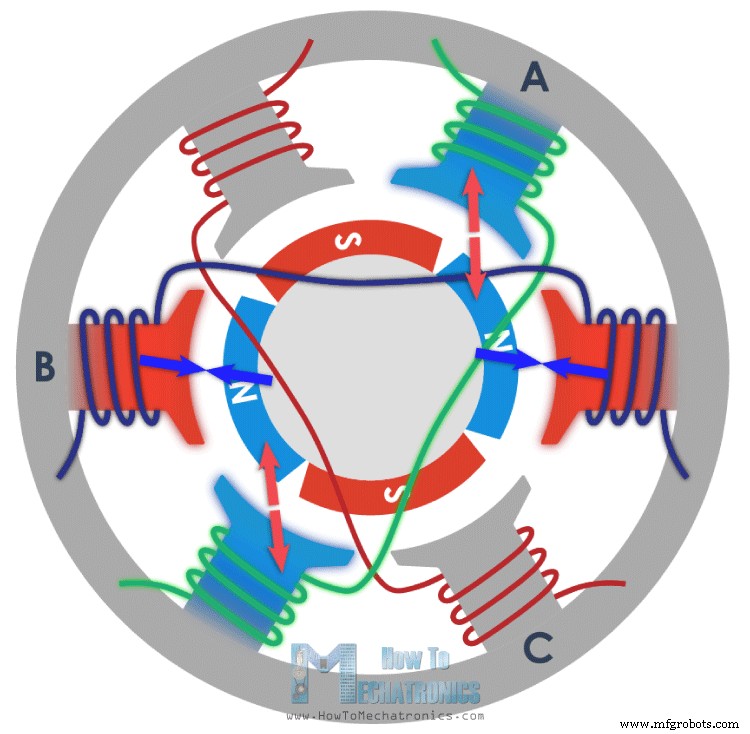
Om de rotor een volledige cyclus van 360 graden te laten maken, heeft hij zes stappen of intervallen nodig.
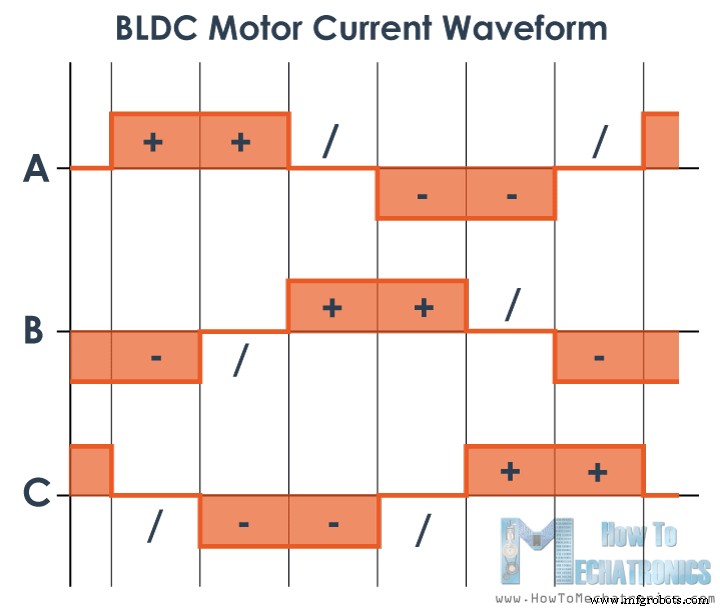
Als we naar de huidige golfvorm kijken, kunnen we zien dat er in elk interval één fase is met positieve stroom, één fase met negatieve stroom en de derde fase is uitgeschakeld. Dit geeft het idee dat we de vrije eindpunten van elk van de drie fasen met elkaar kunnen verbinden, zodat we de stroom ertussen kunnen delen of een enkele stroom kunnen gebruiken om de twee fasen tegelijkertijd van energie te voorzien.
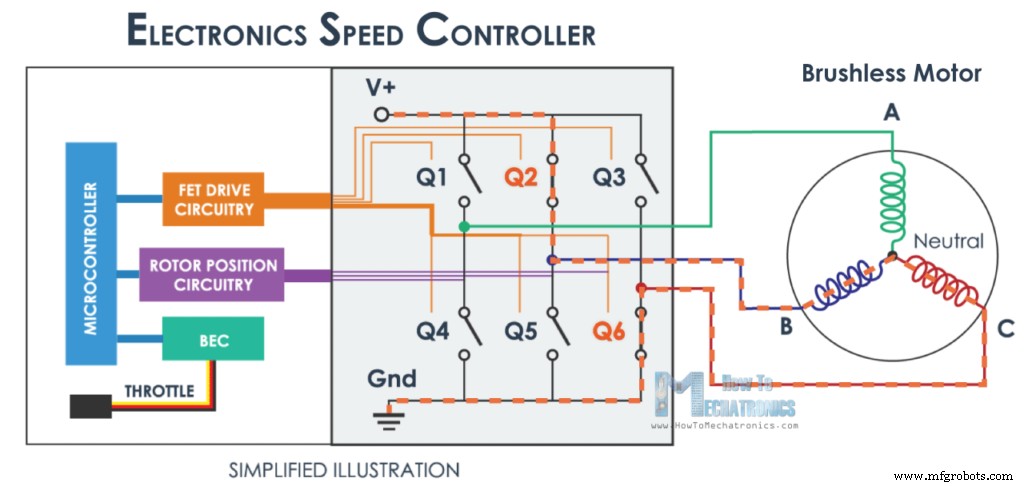
Hier is een voorbeeld. Als we fase A High omhoog trekken, of deze verbinden met de positieve gelijkspanning, met een soort schakelaar, bijvoorbeeld een MOSFET, en aan de andere kant fase B verbinden met aarde, dan zal de stroom vloeien van VCC, door fase A, het neutrale punt en fase B, naar aarde. Dus met slechts een enkele stroom hebben we de vier verschillende polen gegenereerd die ervoor zorgen dat de rotor beweegt.
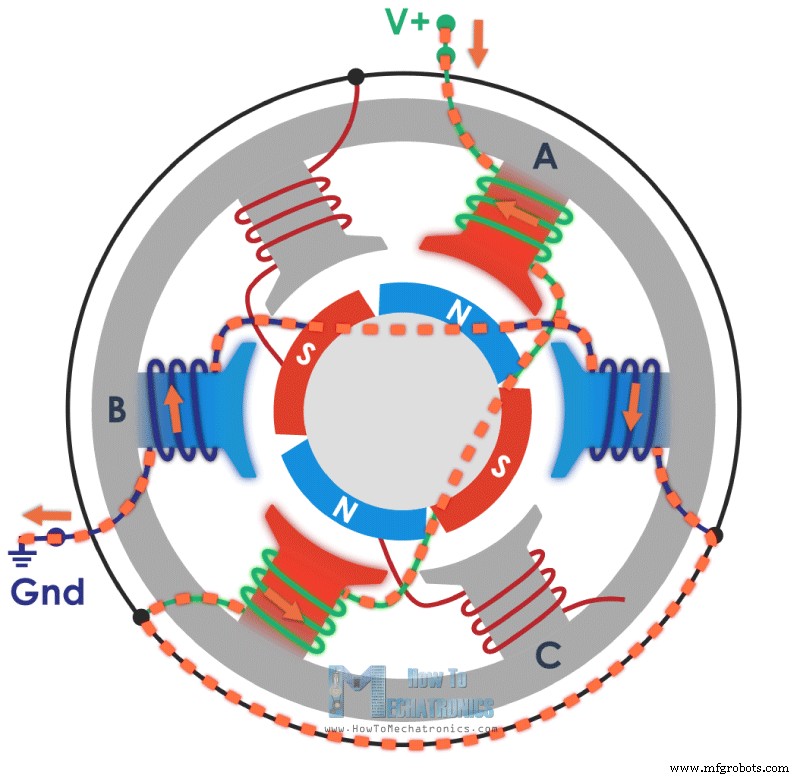
Met deze configuratie hebben we eigenlijk een sterverbinding van de motorfasen, waarbij het neutrale punt intern is verbonden en de andere drie uiteinden van de fasen uit de motor komen en daarom hebben borstelloze motoren drie draden die eruit komen.
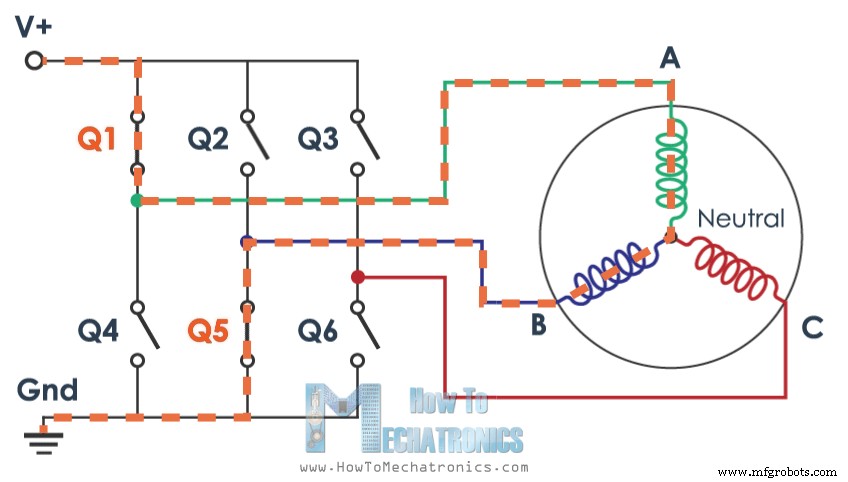
Dus om de rotor een volledige cyclus te laten maken, hoeven we alleen de juiste twee MOSFETS in elk van de 6-intervallen te activeren en dat is waar het bij ESC's eigenlijk om draait.
Hoe werkt een ESC (elektronische snelheidsregelaar)
Een ESC of een elektronische snelheidsregelaar regelt de beweging of snelheid van de borstelloze motor door de juiste MOSFET's te activeren om het roterende magnetische veld te creëren zodat de motor draait. Hoe hoger de frequentie of hoe sneller de ESC door de 6 intervallen gaat, hoe hoger de snelheid van de motor zal zijn.
Hier komt echter een belangrijke vraag, en dat is hoe we weten wanneer we welke fase moeten activeren. Het antwoord is dat we de positie van de rotor moeten weten en er zijn twee veelgebruikte methoden om de rotorpositie te bepalen.
De eerste veelgebruikte methode is door Hall-effectsensoren te gebruiken die in de stator zijn ingebed, gelijkmatig 120 of 60 graden van elkaar geplaatst.
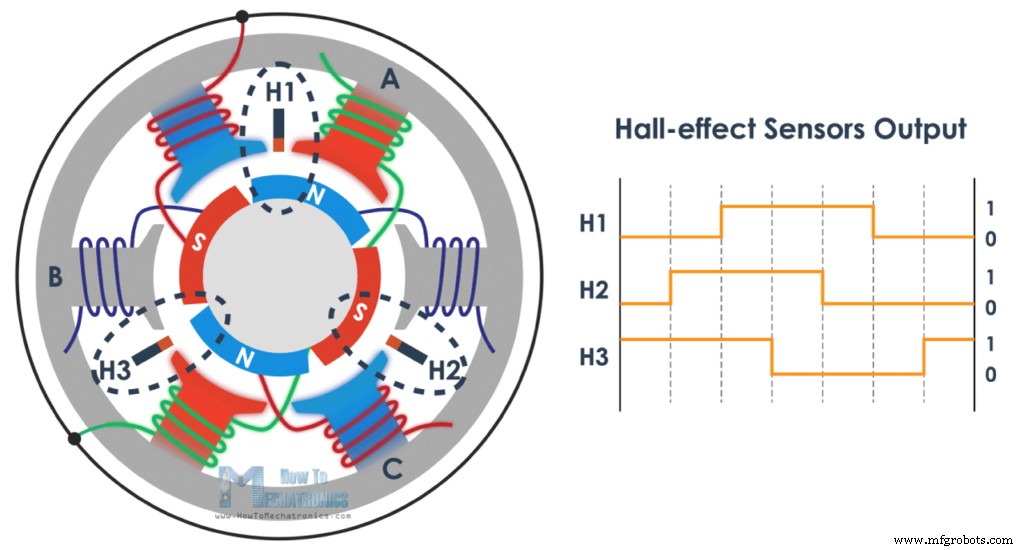
Terwijl de permanente magneten van de rotoren roteren, detecteren de Hall-effectsensoren het magnetische veld en genereren een logisch "hoog" voor één magnetische pool of logisch "laag" voor de tegenovergestelde pool. Volgens deze informatie weet de ESC wanneer de volgende commutatiereeks of -interval moet worden geactiveerd.
De tweede veelgebruikte methode voor het bepalen van de rotorpositie is door het meten van de elektromotorische tegenkracht of tegen-EMK. De tegen-EMK treedt op als resultaat van precies het tegenovergestelde proces van het genereren van een magnetisch veld of wanneer een bewegend of veranderend magnetisch veld door een spoel gaat, induceert het een stroom in de spoel.
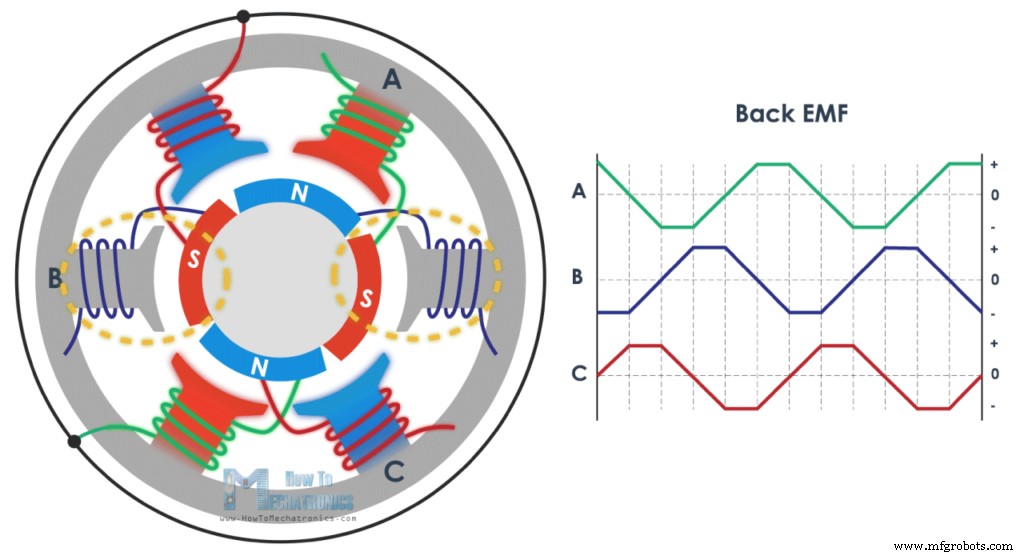
Dus wanneer het bewegende magnetische veld van de rotor door de vrije spoel gaat, of degene die niet actief is, zal het een stroom in de spoel induceren en als resultaat zal er een spanningsval in die spoel optreden. De ESC legt deze spanningsdalingen vast zodra ze zich voordoen en voorspelt of berekent op basis daarvan wanneer het volgende interval moet plaatsvinden.
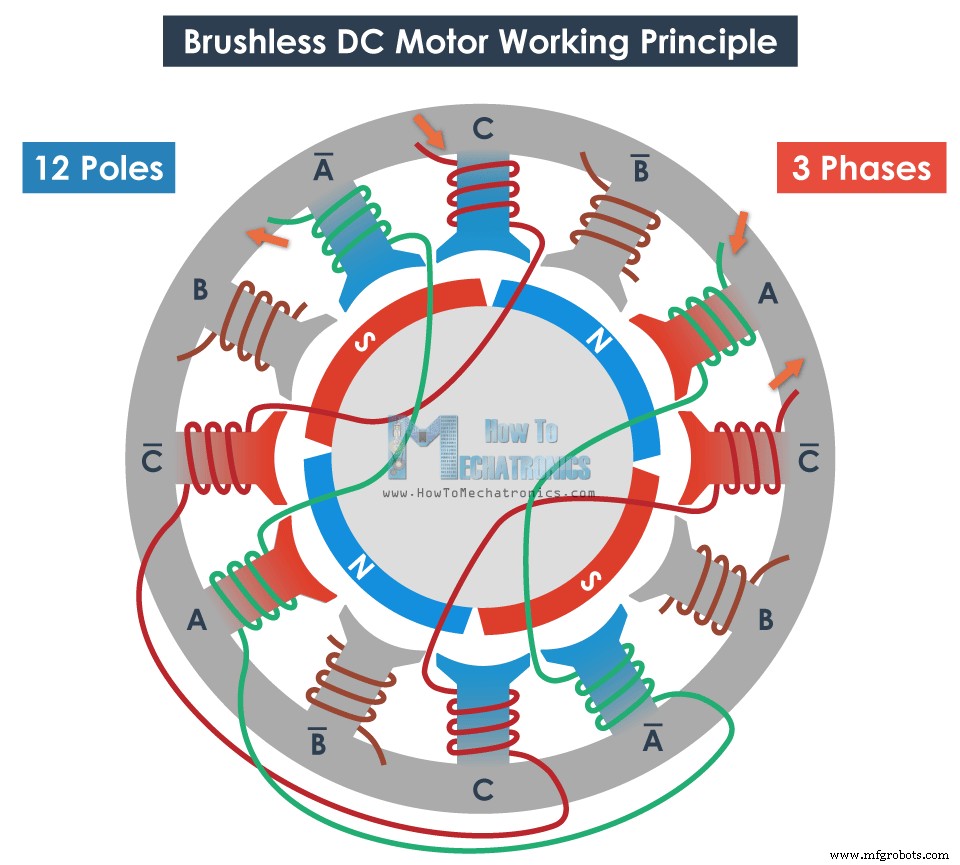
Dus dat is het basiswerkprincipe van borstelloze DC-motoren en ESC's en het is hetzelfde, zelfs als we het aantal polen van zowel de rotor als de stator vergroten. We zullen nog steeds een driefasenmotor hebben, alleen het aantal intervallen zal toenemen om een volledige cyclus te voltooien.
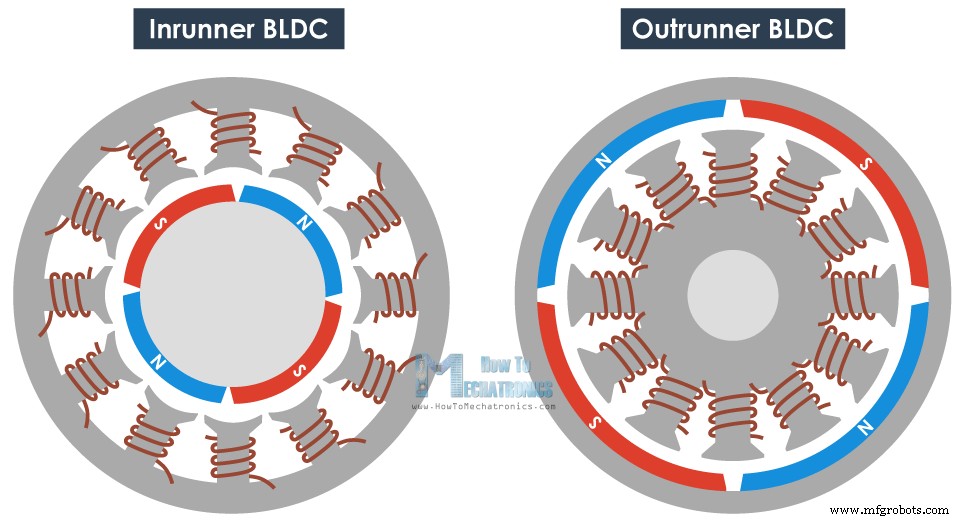
Hier kunnen we ook vermelden dat BLDC-motoren inrunners of outrunners kunnen zijn. Een borstelloze inrunner-motor heeft de permanente magneten in de elektromagneten en vice versa, een outrunner-motor heeft de permanente magneten buiten de elektromagneten. Nogmaals, ze gebruiken hetzelfde werkingsprincipe en elk van hen heeft zijn eigen sterke of zwakke punten.
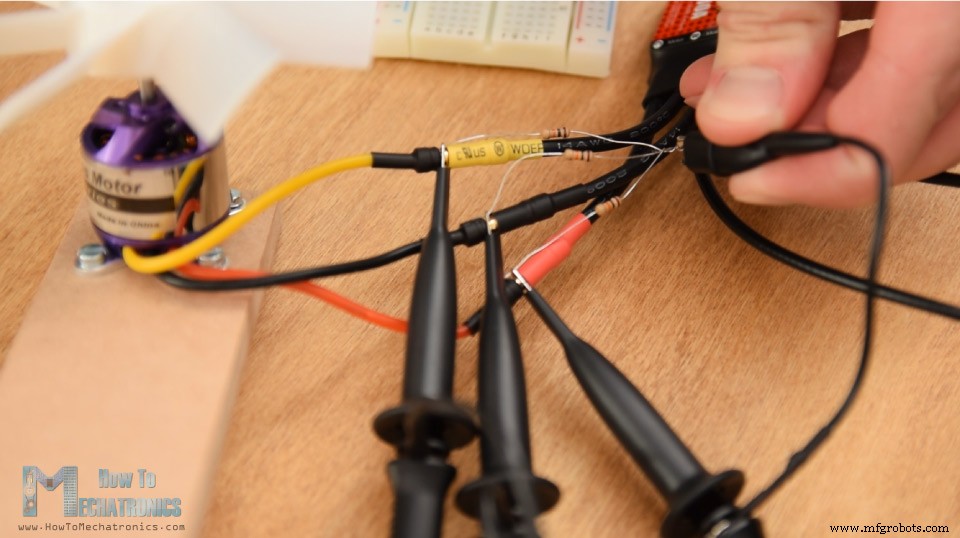
Oké, dat is genoeg theorie, dus laten we nu demonstreren en in het echte leven zien wat we hierboven hebben uitgelegd. Daarvoor gaan we de drie fasen van een brushless motor aansluiten op een oscilloscoop. Ik heb 3 weerstanden in een enkel punt aangesloten om een virtueel neutraal punt te maken en aan de andere kant heb ik ze aangesloten op de drie fasen van de BLDC-motor.
Het eerste dat we hier kunnen opmerken zijn de drie sinusgolven. Deze sinusgolven zijn eigenlijk de achterste EFM die wordt gegenereerd in de fasen waarin ze niet actief zijn.
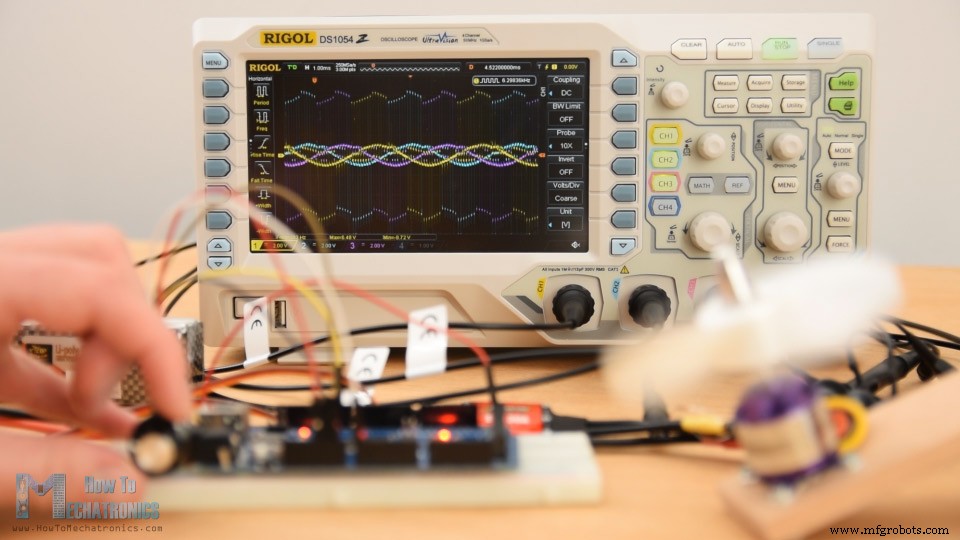
We kunnen zien dat als we het toerental van de motor veranderen, de frequentie van de sinusgolven verandert en ook hun amplitude. Hoe hoger het toerental, hoe hoger de frequentie en de amplitude van de achterste EMF-sinusgolven. Wat de motor echter aandrijft, zijn eigenlijk deze pieken, de actieve fasen die het veranderende magnetische veld genereren.
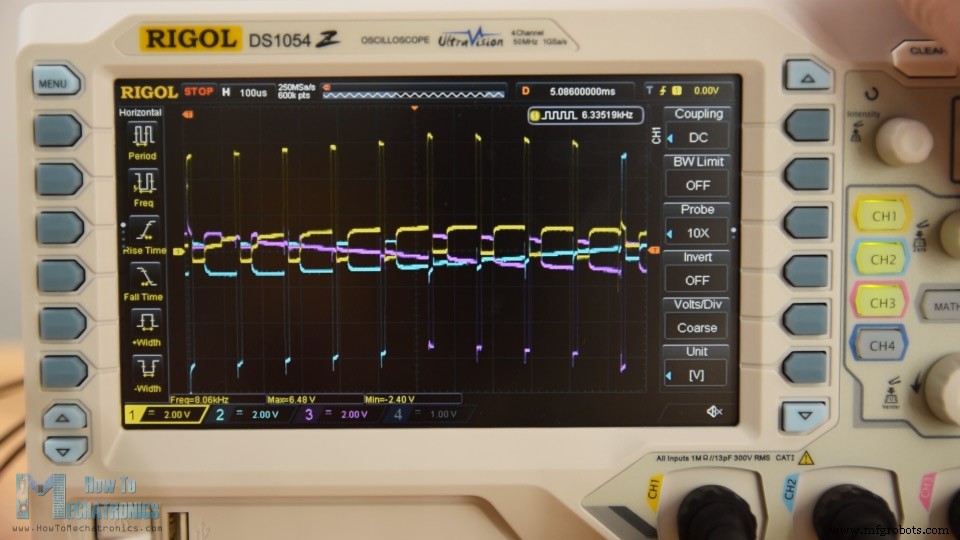
We kunnen zien dat er bij elk interval twee actieve en één inactieve fase zijn. Hier hebben we bijvoorbeeld fase A en B actief, terwijl fase C inactief is. Dan hebben we fase A en C actief, terwijl fase B inactief is, enzovoort.
Hier zou ik graag naar Banggood.com willen schreeuwen voor het verstrekken van deze oscilloscoop. Het is de Rigol DS1054Z en het is een van de beste oscilloscopen op instapniveau voor zijn prijs. Het heeft vier ingangskanalen, een bandbreedte van 50 MHz, die kan worden gehackt tot 100 MHz, het heeft een bemonsteringssnelheid van 1GSa/s en een relatief grote geheugendiepte van 24Mpts.

Het scherm is 7 inch en het is echt mooi en helder. Het beschikt over verschillende wiskundige functies, laagdoorlaat- en hoogdoorlaatfilters, SPI- en I2C-decodering en nog veel meer. Dus nogmaals, grote dank aan Banggood.com en zorg ervoor dat je deze oscilloscoop in hun winkel bekijkt.
Toch is dat het basiswerkprincipe van een borstelloze motor. Als je wat meer echte voorbeelden wilt en wilt leren hoe je borstelloze motoren kunt besturen met Arduino, moet je deel twee van deze tutorial bekijken.
Ik hoop dat je deze tutorial leuk vond en iets nieuws hebt geleerd. Stel gerust een vraag in de opmerkingen hieronder en vergeet niet mijn verzameling Arduino-projecten te bekijken.
Industriële technologie
- Een inleiding tot Cam Locks en hoe ze werken
- Een inleiding tot oogschroeven en hoe ze werken
- Een inleiding tot doorvoertules en hoe ze werken
- Wat is transfer molding en hoe werkt het?
- Wat is een transmissie en hoe werkt het?
- Hoe werkt een geborstelde gelijkstroommotor?
- Wat is 3D-printen? - Soorten en hoe werkt het?
- Wat is booglassen? - Typen en hoe werkt het?
- Wat is een CNC-kotterbank en hoe werkt het?
- Wat is een industriële koppeling en hoe werkt het?
- Hoe pick-and-place-robots werken