


Een kunstmatige-intelligentiesysteem om objecten in rommelige scènes te identificeren
Robotvisie heeft een lange weg afgelegd en heeft een niveau van verfijning bereikt met toepassingen in complexe en veeleisende taken, zoals autonoom rijden en objectmanipulatie. Het heeft echter nog steeds moeite om individuele objecten te identificeren in rommelige scènes waar sommige objecten gedeeltelijk of volledig achter andere zijn verborgen. Bij het omgaan met dergelijke scènes worden robotvisiesystemen meestal getraind om het geoccludeerde object alleen op basis van de zichtbare delen te identificeren. Maar zo'n training vereist grote datasets van objecten en kan vervelend zijn.
Universitair hoofddocent Kyoobin Lee en Ph.D. student Seunghyeok Back van het Gwangju Institute of Science and Technology in Zuid-Korea werd met dit probleem geconfronteerd toen ze een kunstmatige intelligentiesysteem ontwikkelden om objecten in rommelige scènes te identificeren en te sorteren. “We verwachten dat een robot objecten herkent en manipuleert die ze nog niet eerder zijn tegengekomen of waarvoor ze zijn getraind om ze te herkennen. In werkelijkheid moeten we echter handmatig gegevens één voor één verzamelen en labelen, aangezien de generaliseerbaarheid van diepe neurale netwerken sterk afhangt van de kwaliteit en kwantiteit van de trainingsdataset,” zei Back.
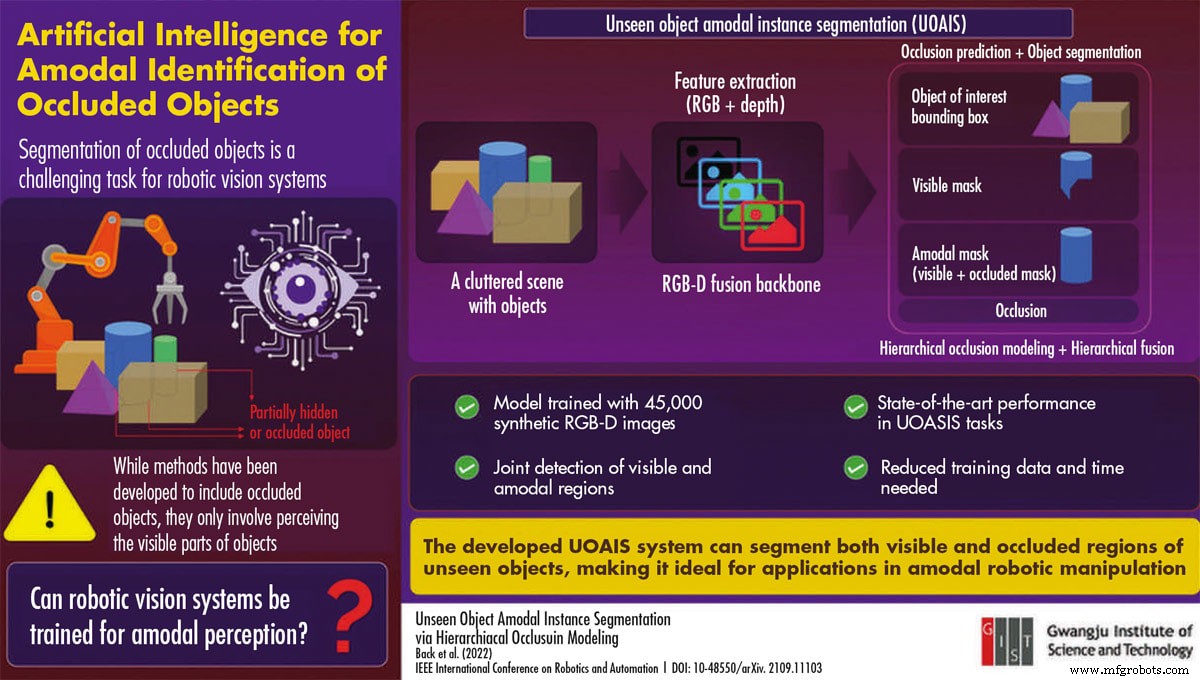
In een nieuwe studie, geleid door Prof. Lee en Back, ontwikkelden ze een model genaamd "unseen object amodal instance segmentation" (UOAIS) voor het detecteren van verstopte objecten in rommelige scènes. Om het model te trainen in het identificeren van objectgeometrie, ontwikkelden ze een database met 45.000 fotorealistische synthetische afbeeldingen met diepte-informatie. Met deze (beperkte) trainingsgegevens kon het model een verscheidenheid aan verstopte objecten detecteren. Bij het tegenkomen van een rommelige scène, koos het eerst het object van belang en bepaalt vervolgens of het object is afgesloten door het object te segmenteren in een "zichtbaar masker" en een "amodaal masker".
De onderzoekers waren enthousiast over de resultaten. "Vorige methoden zijn beperkt tot het detecteren van alleen specifieke soorten objecten of het detecteren van alleen de zichtbare gebieden zonder expliciet te redeneren over afgesloten gebieden. Daarentegen kan onze methode de verborgen gebieden van verstopte objecten afleiden, zoals een menselijk zichtsysteem. Dit zorgt voor een vermindering van de inspanningen voor het verzamelen van gegevens, terwijl de prestaties in een complexe omgeving worden verbeterd”, aldus Back.
Om "occlusie-redenering" in hun systeem mogelijk te maken, introduceerden de onderzoekers een "hiërarchische occlusiemodellering" (HOM) -schema, dat een hiërarchie toekende aan de combinatie van meerdere geëxtraheerde functies en hun voorspellingsvolgorde. Door hun model te testen aan de hand van drie benchmarks, valideerden ze de effectiviteit van het HOM-schema, dat state-of-the-art prestaties leverde.
De onderzoekers zijn hoopvol over de toekomstperspectieven van hun methode. “Het waarnemen van onzichtbare objecten in een rommelige omgeving is essentieel voor amodale robotmanipulatie. Onze UOAIS-methode zou op dit front als basis kunnen dienen”, aldus Back.
Neem voor meer informatie contact op met Seulhye Kim, Gwangju Institute of Science and Technology, op Dit e-mailadres wordt beveiligd tegen spambots. U heeft Javascript nodig om het te kunnen zien.; 82-627-156-253.
Automatisering Besturingssysteem
- Bosch voegt kunstmatige intelligentie toe aan industrie 4.0
- Is kunstmatige intelligentie fictie of rage?
- Kunstmatige intelligentie krijgt enorme Kubernetes-boost
- Kunstmatige intelligentie helpt robot objecten te herkennen door aanraking
- Evolutie van testautomatisering met kunstmatige intelligentie
- Hoe automatisering en kunstmatige intelligentie cyberbeveiliging kunnen stimuleren
- Kunstmatige intelligentie gebruiken om ontbossing te volgen
- Kunstmatige Intelligentie Robots
- Kunstmatige intelligentie is geen app; Het is een methodologie
- Voor- en nadelen van kunstmatige intelligentie
- Big data versus kunstmatige intelligentie