


Hoe te beslissen welke robot het beste is met werkruimtevisualisatie?
Hoe weet u of een robot geschikt is voor uw taak voordat u hem koopt?
Zelfs als je je selectie hebt beperkt tot alle gebruikelijke specificaties en statistieken, heb je misschien nog steeds wat zeurende twijfels.
Zal de robot zo groot zijn dat hij niet past in de ruimte die je ervoor hebt?
Als je met een kleinere robot gaat, kan deze dan alle gebieden bereiken die je nodig hebt voor de taak?
Is er een manier om de grootte van de robot zo efficiënt mogelijk te maken?
Voordat u een bepaalde robot aanschaft, is het moeilijk te zeggen hoe het zal zijn om deze naast u in uw faciliteit te hebben. Je kunt alle YouTube-video's bekijken die je leuk vindt, alle datasheets lezen en zelfs naar andere robots in andermans faciliteiten kijken...
Zonder te zien hoe de robot binnen uw specifieke taak zal passen, kan het soms eindigen als een beetje een raadspel. Je maakt zoveel berekeningen als je kunt, dan hoop je maar.
Of je kiest ervoor om overdreven conservatief te zijn en enorme hoeveelheden vloeroppervlak af te staan aan een robot die het niet nodig heeft.
Misschien heb je onze gids voor het kiezen van een robot voor productie al doorgenomen.
Je hebt bepaald welk type robot je nodig hebt, welke eindeffector en welke accessoires. U heeft uw opties beperkt tot een selectie van robots op basis van hun laadvermogen en herhaalbaarheid. En je hebt onze tools gebruikt om een bereik te selecteren dat min of meer redelijk lijkt.
Maar je kunt nog steeds niet de volledige ruimte visualiseren die elke robot zal innemen.
Waarom het moeilijk is om je de ruimte voor te stellen die een robot in beslag zal nemen
Het probleem met robots is dat ze zo dynamisch zijn.
Met een CNC-machine kunt u bijvoorbeeld op een beurs naar een machine lopen en precies zien hoeveel ruimte deze op uw werkvloer in beslag neemt. De volledige grootte van de machine is eenvoudig te berekenen - het is eigenlijk een grote balk.
Met een robot is de ruimte die hij inneemt niet zo eenvoudig. Naast de fysieke afmetingen van de robot zelf, neemt deze ook een uitgebreide ruimte in beslag met alle locaties die de eindeffector van de robot zal bereiken wanneer de robot beweegt. Dit staat bekend als de 'werkruimte' van de robot.
De meeste industriële robots van 6 DoF hebben een werkruimte die enigszins op een bol lijkt. Delta-robots hebben een complexe werkruimte die eruitziet als een driedimensionale boog. SCARA-robots hebben een cilindrische werkruimte.
Het is moeilijk te zeggen door alleen naar een robot te kijken hoe zijn werkruimte eruit zal zien.

Hoe kunt u ervoor zorgen dat de robot die u overweegt een werkruimte heeft die past bij uw behoeften?
Werkruimtevisualisatie helpt u een betere beslissing te nemen
Gelukkig is er een manier waarop u gemakkelijk de werkruimte van de robot kunt zien en kunt zien welke invloed dit heeft op uw specifieke taak.
En je kunt dit doen voordat je zelfs maar hebt gekozen welke robot je wilt kopen.
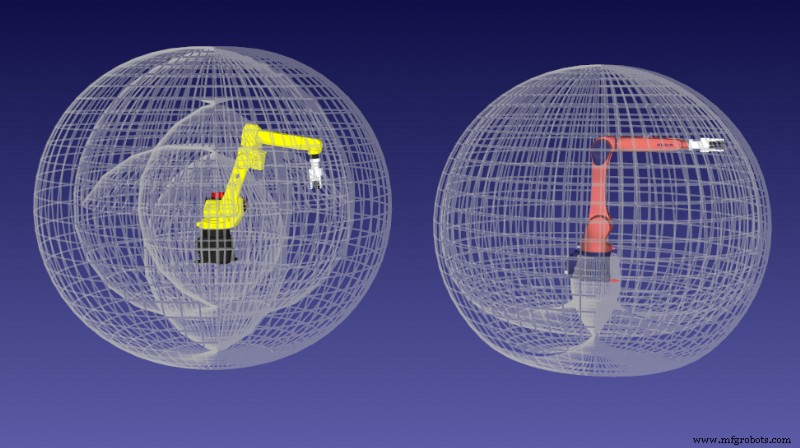
Werkruimtevisualisatie is een hulpmiddel waarmee u de buitenste grenzen van de werkruimte van een robot kunt visualiseren als een 3D-vorm. In RoboDK wordt deze ruimte weergegeven als een grijze omtreklijn die rond het gesimuleerde model van de robot wordt geplaatst.
U kunt deze functie gebruiken om te bepalen welke robot het beste is voor uw taak.
Door een virtuele mock-up van uw toepassing te maken, kunt u snel schakelen tussen verschillende robotmodellen (zonder de taak zelf te hoeven programmeren) en de functie voor visualisatie van de werkruimte gebruiken om te zien of elke specifieke robot de beste is voor uw behoeften.
Als je eenmaal een robot hebt gevonden die bij de taak past — op basis van zijn werkruimte — kun je de applicatie in de simulator programmeren om ervoor te zorgen dat de door jou gekozen robot het werk ook echt kan doen.
Hoe werkruimtevisualisatie werkt
Als u naar de datasheet van een robot kijkt, ziet u normaal gesproken een eenvoudige afbeelding van de werkruimte van die robot. Meestal bestaat dit uit een weergave vanaf de zijkant en een vanaf de bovenkant van de robot.
Dergelijke foto's zijn nuttig, maar niet nuttig genoeg.
Een werkruimtevisualisatie is in feite een 3D-versie van dergelijke afbeeldingen. Het wordt geproduceerd door algoritmisch alle gewrichten van de robot door alle mogelijke posities te bewegen en de resulterende positie van de eindeffector in een 3D-vorm in kaart te brengen.
Omdat de berekening in 3D wordt gedaan, krijg je een veel holistischer perspectief op de mogelijkheden van een bepaalde robot dan wanneer je alleen naar de datasheet van de robot zou kijken.
De impact van het toevoegen van een eindeffector
Wijzigingen die u aan de robot aanbrengt, hebben soms ook invloed op de werkruimte. Wanneer u bijvoorbeeld een eindeffector toevoegt, veranderen de afmetingen van die eindeffector de grootte en soms ook de vorm van de werkruimte. In RoboDK kunt u ervoor kiezen om de werkruimte van de robot met en zonder eindeffector te zien.
Telkens wanneer u een eindeffector aan uw robot toevoegt, is het een goede gewoonte om de functie voor visualisatie van de werkruimte te gebruiken om te zien welke invloed dit heeft op de werkruimte van de robot.
Aan de slag met Workspace Visualization
Met RoboDK is het heel eenvoudig om werkruimtevisualisatie te gebruiken om u te helpen bij uw aankoopbeslissingen voor robots.
Hier zijn de stappen om de werkruimte van een bepaalde robot te bekijken:
- Laad het robotmodel in RoboDK vanuit onze uitgebreide robotbibliotheek.
- Open het eigenschappenvenster van de robot door er met de rechtermuisknop op te klikken in de programmastructuur.
- Ga naar het gedeelte met het label WorkSpace en kies ervoor om de werkruimte van de robot zelf te bekijken (vanaf de flens) of met het huidige gereedschap eraan bevestigd.
- Je ziet nu de werkruimte van de robot gevisualiseerd rond de robot zelf.
Natuurlijk bent u niet beperkt tot het bekijken van de werkruimte van één robot tegelijk. U kunt meerdere robots in de simulatie laden en hun werkruimten naast elkaar vergelijken.
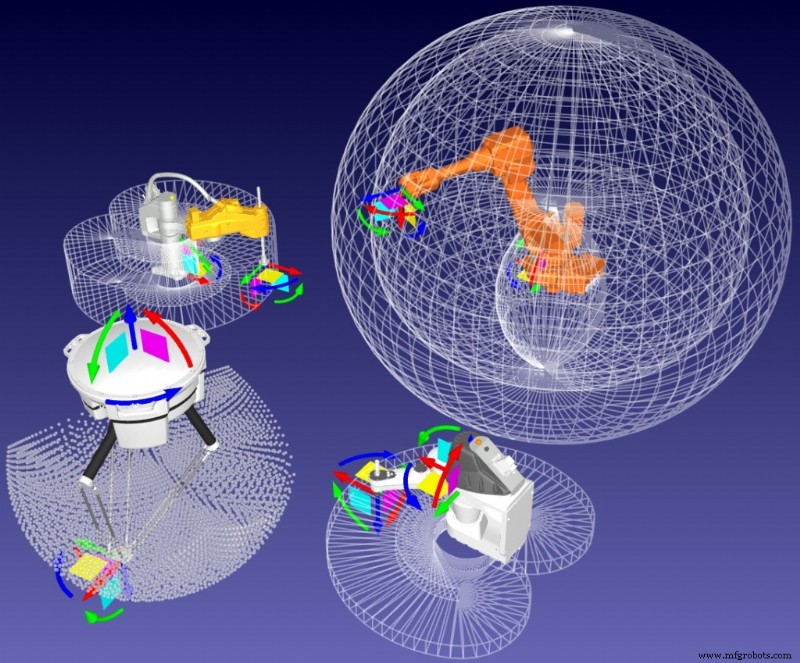
Dit kan handig zijn wanneer u probeert te kiezen tussen twee verschillende robotmodellen. Maar het kan ook handig zijn wanneer u meerdere robots voor één taak gebruikt en u wilt weten hoe hun werkruimten op elkaar inwerken en elkaar overlappen.
Hoe kan visualisatie van de werkruimte uw robotimplementatie helpen? Vertel het ons in de reacties hieronder of neem deel aan de discussie op LinkedIn, Twitter, Facebook, Instagram of in het RoboDK-forum.
Industriële robot
- Welke industriële verfrobots werken het beste?
- Beste 10 SCARA-robotfabrikanten
- Beslissen welk engineeringbedrijf geschikt is voor u
- Gratis robottraining met RoboDK
- Robot Drilling 101:Hoe een robotboorsysteem te implementeren?
- Hoe Hollywood verbluffende rekwisieten maakt met robotfrezen
- 10 trucs om de beste resultaten te behalen met robotlassen
- Hoe u het management kunt overtuigen om in te stemmen met robotbewerking?
- Hoe één ingenieur stofvrije robotgravure bereikte met RoboDK
- Aan de slag met Yaskawa-robotprogrammering
- Robotkalibratie:welke onderdelen moeten worden gekalibreerd?