


Arduino/Android - BLUETOOTH multi-servomotorbesturing
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Over dit project

Hallo Wereld! Ik heb gisteren een 1 servo control app gemaakt en ik zei dat ik een multi control zou maken, dus hier is de multi control app! Ik heb ook een betere Arduino-code gemaakt. Volg de volgende stap voor het schema, de code, de onderdelenlijst en de app.
Download de app op: GOOGLE PLAY
Neem contact met me op als je de broncode wilt!
Stap 1:Onderdelenlijst
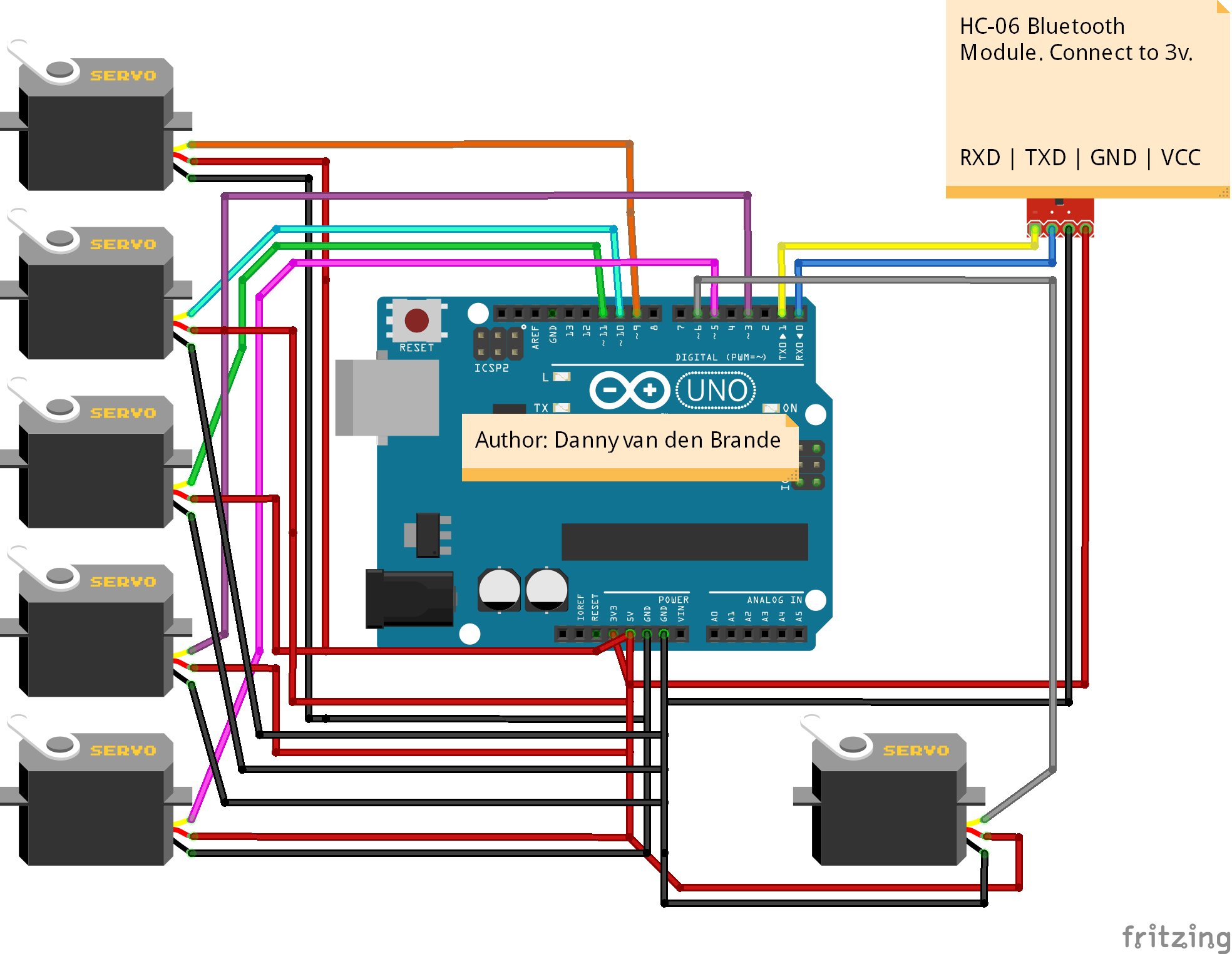
Sluit alles aan zoals in het schema, upload de code, download de app, verbind Bluetooth na het koppelen van de apparaten en het zou moeten werken. Zorg ervoor dat u RXD verbindt met TX en TXD met RX.
Zorg er ook voor dat u de Bluetooth-module NIET aansluit tijdens het uploaden.
Onderdelenlijst:
- Arduino Uno, (Gebruik een Mega als je meer dan 6 servo's wilt gebruiken!) Ik gebruikte de RobotDyn Uno.
- HC-06 Bluetooth-module of een andere.
- 6 x servomotor. (Kan natuurlijk met eentje testen )
- Verbindingsdraden set MM/FF/MF
- Android-telefoon.
Veel succes!
Volg de volgende stap om erachter te komen hoe u de naam, pin &baudrate van uw Bluetooth-module kunt wijzigen. (optioneel )
Stap 2:De naam van uw HC-06 wijzigen
Wat is er nodig?
- 1 x USB naar TTL microcontroller-programmeur om aan te sluiten op uw HC-06
Hoe sluit ik de Programmer aan?
- VCC naar VCC
- GND naar GND
- RXD naar TX
- TXD naar RX
Laten we beginnen:
- Sluit de USB TTL-programmer aan op de HC-06.
- Sluit de USB aan en open de Arduino IDE.
- Open de seriële monitor.
- Typ "AT" zonder aanhalingstekens. U zou een antwoord moeten zien in de seriële monitor met de tekst "OK".
- Typ "AT+NAMExyz". Stelt de modulenaam in op "xyz" (vervang xyz door de gewenste naam.) antwoord moet OKsetname zijn.
- Typ "AT+PIN1234". Stelt de pin in op 1234 (vervang 1234 door de gewenste pin) antwoord moet OKsetPIN zijn. Voor meer informatie over het wijzigen van de baudrate enz. heb ik een PDF-bestand bijgevoegd. Veel succes!
Code
- BLUETOOTH_Servo_Control_Multi_Servo.ino
BLUETOOTH_Servo_Control_Multi_Servo.inoArduino
Code om meerdere servo's aan te sturen./*Auteur:Danny van den Brande.Met deze code kun je meerdere servomotoren aansturen met een Android app.Je kunt er zoveel toevoegen als je wilt totdat je pinnen op zijn. Je kunt meer servo's in de code toevoegen. Als je de bron van de app wilt, neem dan gewoon contact met me op. */#includeServo myservo1, myservo2, myservo3, myservo4, myservo5, myservo6, myservo7, myservo8, myservo9, myservo10;byte serialA;void setup(){ myservo1.attach(9); mijnservo2.attach(10); mijnservo3.attach (11); mijnservo4.attach (3); myservo5.attach(5); myservo6.attach(6);// myservo7.attach(); vul pinnummers in als je meer dan 6 servo's gebruikt, ik heb ze leeg gelaten// myservo8.attach();// myservo9.attach();// myservo10.attach(); Serial.begin(9600);// verander indien nodig uw baudrate in de baudrate van uw Bluetooth-modules.}void loop(){ if (Serial.available()> 2) {serialA =Serial.read();Serial.println(serialA );} { unsigned int servopos =Serial.read(); unsigned int servopos1 =Serial.read(); unsigned int realservo =(servopos1 *256) + servopos; Serial.println(realservo); if (realservo>=1000 &&realservo <1180){ int servo1 =realservo; servo1 =kaart (servo1, 1000,1180,0,180); mijnservo1.schrijf(servo1); Serial.println ("servo 1 AAN"); vertraging(10); } if (realservo>=2000 &&realservo <2180){ int servo2 =realservo; servo2 =kaart (servo2,2000,2180,0,180); mijnservo2.write(servo2); Serial.println ("servo 2 aan"); vertraging(10); } if (realservo>=3000 &&realservo <3180){ int servo3 =realservo; servo3 =kaart (servo3, 3000, 3180,0,180); myservo3.write(servo3); Serial.println("servo 3 aan"); vertraging(10); } if (realservo>=4000 &&realservo <4180){ int servo4 =realservo; servo4 =kaart (servo4, 4000, 4180,0,180); myservo4.write(servo4); Serial.println("servo 4 Aan"); vertraging(10); } if (realservo>=5000 &&realservo <5180){ int servo5 =realservo; servo5 =kaart (servo5, 5000, 5180,0,180); myservo5.write(servo5); Serial.println ("servo 5 aan"); vertraging(10); } if (realservo>=6000 &&realservo <6180){ int servo6 =realservo; servo6 =kaart (servo6, 6000, 6180,0,180); myservo6.write(servo6); Serial.println("servo 6 Aan"); vertraging(10); }// if (realservo>=7000 &&realservo <7180) {//UNCOMMENTAAR bij gebruik van meer dan 6 servo's.// int servo7 =realservo;// servo7 =map (servo7, 7000, 7180,0,180);// myservo7 .write(servo7);// Serial.println("servo 7 On");// delay(10);// }//// if (realservo>=8000 &&realservo <8180){// int servo8 =realservo;// servo8 =map(servo8, 8000, 8180,0.180);// myservo8.write(servo8);// Serial.println("servo 8 On");// delay(10);// }/ /// if (realservo>=9000 &&realservo <9180){// int servo8 =realservo;// servo8 =map (servo9, 9000, 9180,0.180);// myservo8.write (servo8);// Serieel. println("servo 9 On");// delay(10);// }//// if (realservo>=10000 &&realservo <10180){// int servo10 =realservo;// servo10 =map(servo10, 10000, 10180,0.180);// myservo10.write(servo10);// Serial.println("servo 10 On");// delay(10);// } }}
Schema's
Productieproces
- Simple Pi Robot
- Universele afstandsbediening met Arduino, 1Sheeld en Android
- Arduino-controlecentrum
- Android bestuurd speelgoed met Raspberry Motor Shield
- Obstakels vermijden robot met servomotor
- Arduino met Bluetooth om een LED te bedienen!
- Arduino-luchtbevochtigerbediening
- Besturing van servomotor met Arduino en MPU6050
- Autobesturing met Arduino Uno en Bluetooth
- Wat is een servomotor?
- Wat is servomotorreductor?