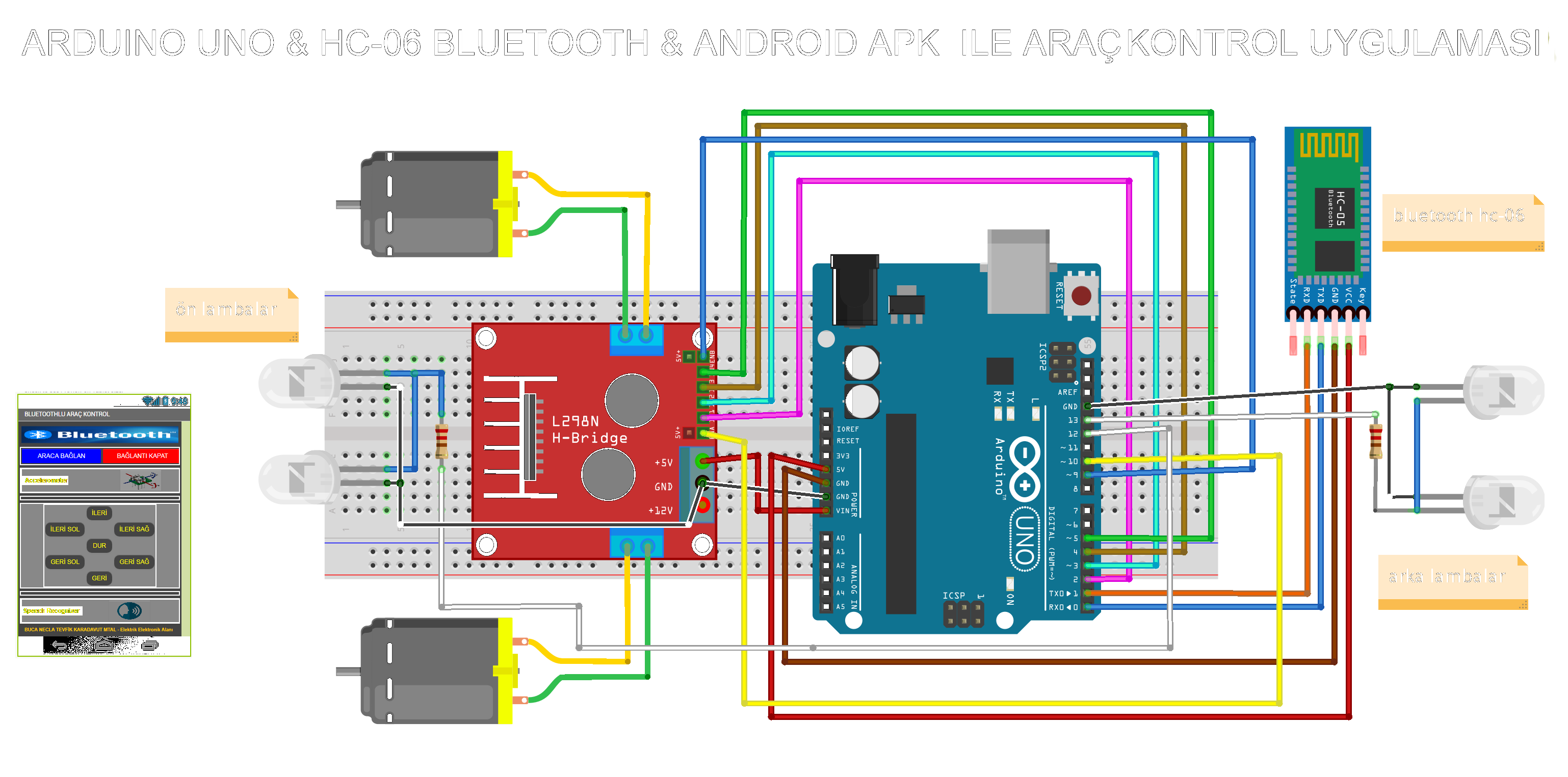
Ik wilde een auto controleren, maar ik heb verschillende manieren om het op afstand te proberen. Ik wilde het met bluetooth doen nadat ik de benodigde tools hiervoor had en nadat de software was geschreven. en dit wordt mijn tweede project in de hackster
Code
arduino-codeArduino
char buffer[67];byte Pino02 =2;byte Pino03 =3;byte Pino04 =4;byte Pino05 =5;byte Pino06 =6;byte Pino07 =7;byte Pino12 =12;byte Pino13 =13;void setup(){ Serieel.begin(9600); Serieel.flush(); pinMode (Pino02, UITGANG); pinMode (Pino03, UITGANG); pinMode (Pino04, UITGANG); pinMode (Pino05, UITGANG); pinMode (Pino06, UITGANG); pinMode (Pino07, UITGANG); pinMode(9, UITGANG); pinMode (10, UITGANG); pinMode (12, UITGANG); pinMode(13, OUTPUT);}void loop(){ if (Serial.available()>0){ int index=0; delay(100);//deixe o buffer encher int numChar =Serial.available(); if(numChar>65){ numChar=65; } while(numChar--){ buffer[index++] =Serial.read(); } splitString(buffer); }}void splitString(char* data){ Serial.print("Dados inseridos:"); Serial.println(gegevens); char*-parameter; parameter=strtok (gegevens, " ,"); while(parameter!=NULL){ setLED(parameter); parameter =strtok (NULL, " "); } //Limpa o texto e os buffers serie voor (int x=0; x<66; x++){ buffer[x]='\0'; } Serial.flush();}void setLED(char* data){ if (data[0] =='A'){ analogWrite(9, 50); analoogWrite(10, 50); digitalWrite (Pino02, LAAG); digitalWrite (Pino03, HOOG); digitalWrite (Pino04, HOOG); digitalWrite (Pino05, LAAG); digitalWrite (12, HOOG); digitalWrite(13,LAAG); }//İLERİSOL if (data[0] =='C'){ analogWrite(9, 50); analoogWrite(10, 50); digitalWrite (Pino02, HOOG); digitalWrite (Pino03, LAAG); digitalWrite (Pino04, LAAG); digitalWrite(Pino05, HOOG); digitalWrite (12, HOOG); digitalWrite(13,LAAG); }//İLERİSAĞ if (data[0] =='B'){ analogWrite(9, 25); analoogWrite(10, 25); digitalWrite (Pino02, HOOG); digitalWrite (Pino03, LAAG); digitalWrite (Pino04, HOOG); digitalWrite (Pino05, LAAG); digitalWrite (12, LAAG); digitalWrite(13,HOOG); }//GERİ1 if (data[0] =='M'){ analogWrite(9, 75); analoogWrite(10, 75); digitalWrite (Pino02, HOOG); digitalWrite (Pino03, LAAG); digitalWrite (Pino04, HOOG); digitalWrite (Pino05, LAAG); digitalWrite (12, LAAG); digitalWrite(13,HOOG); }//GERİ2 if (data[0] =='N'){ analogWrite(9, 125); analoogWrite(10, 125); digitalWrite (Pino02, HOOG); digitalWrite (Pino03, LAAG); digitalWrite (Pino04, HOOG); digitalWrite (Pino05, LAAG); digitalWrite (12, LAAG); digitalWrite(13,HOOG); }//GERİ3 if (data[0] =='P'){ analogWrite(9, 175); analoogWrite(10, 175); digitalWrite (Pino02, HOOG); digitalWrite (Pino03, LAAG); digitalWrite (Pino04, HOOG); digitalWrite (Pino05, LAAG); digitalWrite (12, LAAG); digitalWrite(13,HOOG); }//GERİ4 if (data[0] =='L'){ analogWrite(9, 225); analoogWrite(10, 225); digitalWrite (Pino02, HOOG); digitalWrite (Pino03, LAAG); digitalWrite (Pino04, HOOG); digitalWrite (Pino05, LAAG); digitalWrite (12, LAAG); digitalWrite(13,HOOG); }//GERİ5 if (data[0] =='D'){ analogWrite(9, 25); analoogWrite(10, 25); digitalWrite (Pino02, LAAG); digitalWrite (Pino03, HOOG); digitalWrite (Pino04, LAAG); digitalWrite(Pino05, HOOG); digitalWrite (12, HOOG); digitalWrite(13,LAAG); }//İLERİ1 if (data[0] =='H'){ analogWrite(9, 75); analoogWrite(10, 75); digitalWrite (Pino02, LAAG); digitalWrite (Pino03, HOOG); digitalWrite (Pino04, LAAG); digitalWrite(Pino05, HOOG); digitalWrite (12, HOOG); digitalWrite(13,LAAG); }//İLERİ2 if (data[0] =='I'){ analogWrite(9, 125); analoogWrite(10, 125); digitalWrite (Pino02, LAAG); digitalWrite (Pino03, HOOG); digitalWrite (Pino04, LAAG); digitalWrite(Pino05, HOOG); digitalWrite (12, HOOG); digitalWrite(13,LAAG); }//İLERİ3 if (data[0] =='K'){ analogWrite(9, 175); analoogWrite(10, 175); digitalWrite (Pino02, LAAG); digitalWrite (Pino03, HOOG); digitalWrite (Pino04, LAAG); digitalWrite(Pino05, HOOG); digitalWrite (12, HOOG); digitalWrite(13,LAAG); }//İLERİ4 if (data[0] =='L'){ analogWrite(9, 225); analoogWrite(10, 225); digitalWrite (Pino02, LAAG); digitalWrite (Pino03, HOOG); digitalWrite (Pino04, LAAG); digitalWrite(Pino05, HOOG); digitalWrite (12, HOOG); digitalWrite(13,LAAG); }//İLERİ5 if (data[0] =='U'){ digitalWrite(Pino02, LOW); digitalWrite (Pino03, LAAG); digitalWrite (Pino04, LAAG); digitalWrite (Pino05, LAAG); digitalWrite (12, LAAG); digitalWrite(13,LAAG); }//DUR if (data[0] =='E'){ analogWrite(9, 50); analoogWrite(10, 50); digitalWrite (Pino02, LAAG); digitalWrite (Pino03, HOOG); digitalWrite (Pino04, LAAG); digitalWrite(Pino05, HOOG); }//YAVAŞ İLERİ if (data[0] =='F'){ analogWrite(9, 50); analoogWrite(10, 50); digitalWrite (Pino02, HOOG); digitalWrite (Pino03, LAAG); digitalWrite (Pino04, HOOG); digitalWrite (Pino05, LAAG); }//YAVAŞ GERİ } Aangepaste onderdelen en behuizingen
arduinoslider2_dxxyKBsRDa.apk