


Smart Talking Humanoid Robot Alleen met Arduino!
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 3 | |||
| × | 1 | ||||
| × | 3 | ||||
| × | 1 | ||||
 |
| × | 1 |
Apps en online services
 |
|
Over dit project
Deze robot - Mofiza- (rare naam) kan ZIEN, PRATEN en reageren op haar omgeving. Bekijk de video voordat ik verder ga:
Sinds ik pratende robots heb zien maken, zag ik dat mensen andere ontwikkelingsborden gebruiken in plaats van Arduino om pratende robots te maken. Maar het is heel goed mogelijk om met Arduino een Humanoid-robot te maken die kan praten en veel servo's kan toevoegen om hem te laten bewegen. Dus laten we beginnen:
Update (hoe ik het heb gemaakt) -
Stap 1:Onderdelen die je nodig hebt


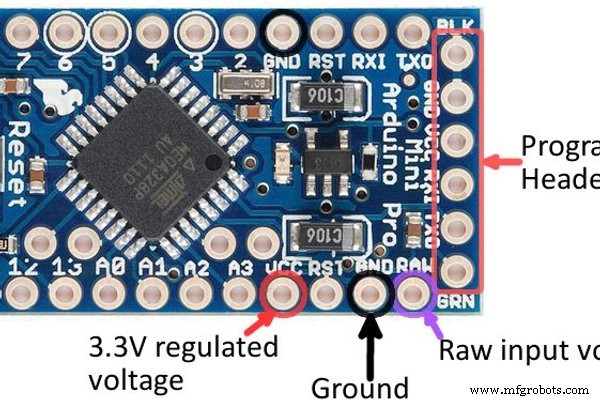
- Arduino Pro mini (5v 16 Mhz) [elk bord is goed, maar ik heb dit gebruikt om het klein te maken)
- Vrouwelijke header-pinnen voor aansluiting op pcb
- Mannelijke koppinnen
- Vero-bord om het circuit te maken
- SD-kaart TF-module (om het te laten praten)
- micro-sd-kaart (niet meer dan 2 GB)
- 3x IR-nabijheidssensor
- 3x servomotor (ik heb micro servo sg90 gebruikt)
- Kartonnen om het lichaam te maken
Stap 2:De IR-sensor en het lichaam aansluiten

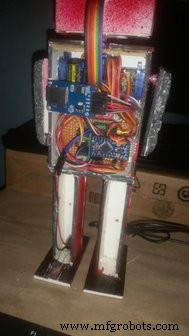
Maak een lichaam met alles wat je wilt, ik heb het gemaakt van karton. Het is vrij eenvoudig.
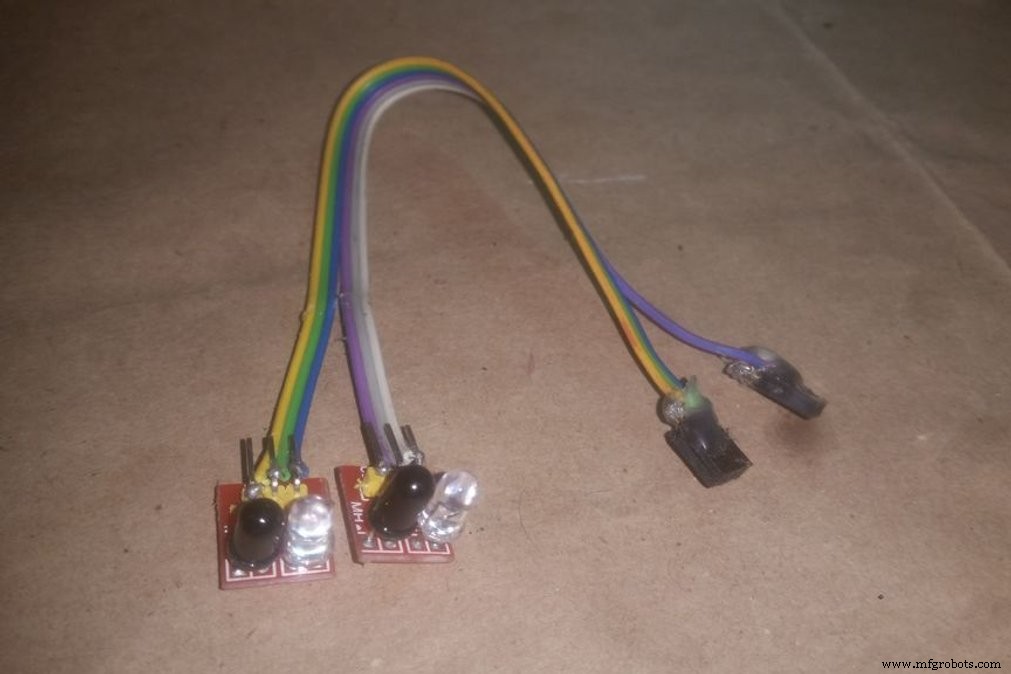
Ik heb IR-sensoren op deze manier met lintkabel gesoldeerd met een vrouwelijke kop aan het ene uiteinde en twee in twee ogen en één in de borst toegevoegd.
De robot zal het welkomstbericht zeggen als hij iets in de borstsensor detecteert en zal zeggen "aaaah... raak mijn oog niet aan" als een oogsensor hoog is. en de servo daarin zal omhoog gaan.
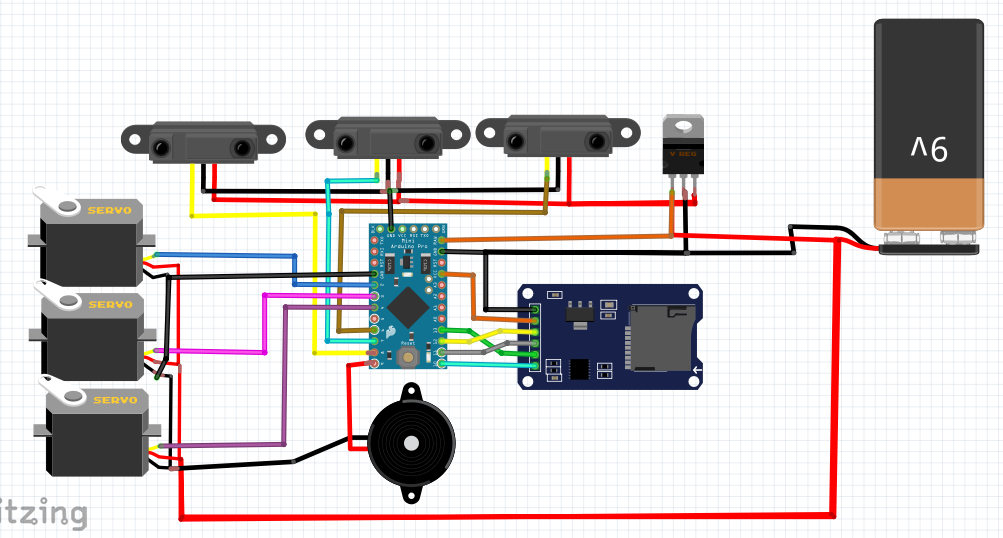
Stap 3:Het circuit
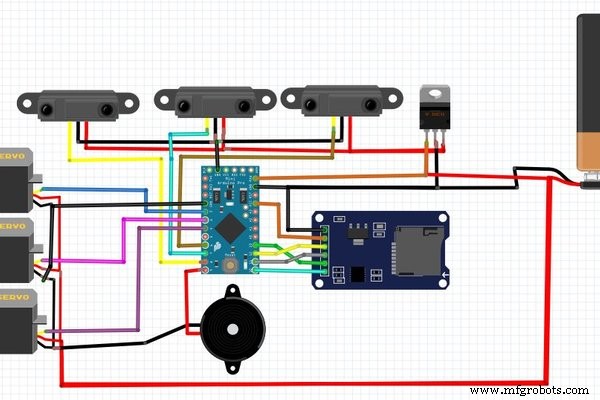
Het circuit ziet er een beetje ingewikkeld uit, maar nee, het is al te gemakkelijk, je kunt het gewoon van stroom voorzien door één batterij. soldeer het circuit en alle andere componenten in een vero-bord en voeg andere servo toe op hoofd en handen.
Stap 4:Codeer
Voor de codes:
Ik moest twee bibliotheken gebruiken voor deze robot.
TMRpcm.h - voor het afspelen van audio van SD-kaart- talk https://github.com/TMRh20/TMRpcm
ServoTimer2.h - vermijd conflicten met TMRpcm en voer servomotoren uit met timer2 aangezien TMRpcm Timer1 op arduino gebruikt. https://create.arduino.cc/projecthub/ashraf_minhaj/how-to-use-servotimer2-library-simple-explain-servo-sweep-512fd9?ref=user&ref_id=507819&offset=1
Dit is de code om welkom te zeggen. U kunt uw eigen omgeving en code maken. Voordat je begint met coderen, moet je de ServoTimer2-bibliotheek toevoegen. De robot zal ook niet rennen.
En dan omhoog De code:
#include "ServoTimer2.h"#include#define SD_ChipSelectPin 10#include"TMRpcm.h"#includeTMRpcm tmrpcm;ServoTimer2 matha;ServoTimer2 lhand;ServoTimer2 rhand;int in1=6;int in2=7;int in3=8; ongeldige setup () { matha.attach (2); lhand.bijvoegen (3); rhand.attach(4); tmrpcm.speakerPin=9; Serieel.begin(9600); if(!SD.begin(SD_ChipSelectPin)) { Serial.println("SD FAIL"); opbrengst; }}void loop() { if(!(digitalRead(in3))) { tmrpcm.play("welcome.wav"); lhand.write(2500); vertraging (2000); lhand.write(1200); // handshake positie vertraging (9000); } else { lhand.write(300); rhand.write(1700); matha.write(1500); }}
Stap 5:Voltooien
Nu gewoon aanzetten en klaar. Een slimme robot is klaar met maken. [Ik zal binnenkort andere foto's en details uploaden]
Als ik meer spelden kon krijgen, zou ik de robot laten lopen. maar ik had nog maar 3 pinnen over (digitaal). Het is minder dan ik nodig heb.
Steun me door je te abonneren op mijn YouTube-kanaal.
Code
- mofiza.welcome.code
mofiza.welcome.codeC/C++
#include "ServoTimer2.h"#include#define SD_ChipSelectPin 10#include"TMRpcm.h"#includeTMRpcm tmrpcm;ServoTimer2 matha; // matha betekent HEADServoTimer2 lhand;ServoTimer2 rhand;int in1=6;int in2=7;int in3=8;void setup() { matha.attach(2); lhand.bijvoegen (3); rhand.attach(4); tmrpcm.speakerPin=9; Serieel.begin(9600); if(!SD.begin(SD_ChipSelectPin)) { Serial.println("SD FAIL"); opbrengst; }}void loop() { if(!(digitalRead(in3))) { tmrpcm.play("welcome.wav"); lhand.write(2500); vertraging (2000); lhand.write(1200); // handshake positie vertraging (9000); } else { lhand.write(300); rhand.write(1700); matha.write(1500); }} mofiza.fullCode.v1.1
https://github.com/ashraf-minhaj/Mofiza--Humanoid-social-robotSchema's
Productieproces
- Bouw uw internetgestuurde videostreamingrobot met Arduino en Raspberry Pi
- Slimme jaloezieën
- Bedien muntvangers met Arduino
- Obstakels vermijden robot met servomotor
- Arduino met Bluetooth om een LED te bedienen!
- Lijnvolger Robot
- Een Roomba-robot besturen met Arduino en Android-apparaat
- Spraakgestuurde robot
- Bedien de Arduino-robotarm met Android-app
- Smart Battery Charger Multiplexer met Smart Display
- Maak een eetrobot met Arduino Nano | Gouden schroef