


Lijnvolger Robot
Componenten en benodigdheden
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Apps en online services
 |
|
Over dit project
Laten we een volledig autonome robot maken met behulp van Arduino- en IR-sensoren. Het kan een zwarte lijn volgen op een wit oppervlak. Bekijk de video voor meer!
Gebruikte componenten:
- Stuk karton/Acryl plaat
- Arduino Uno
- IR-sensor
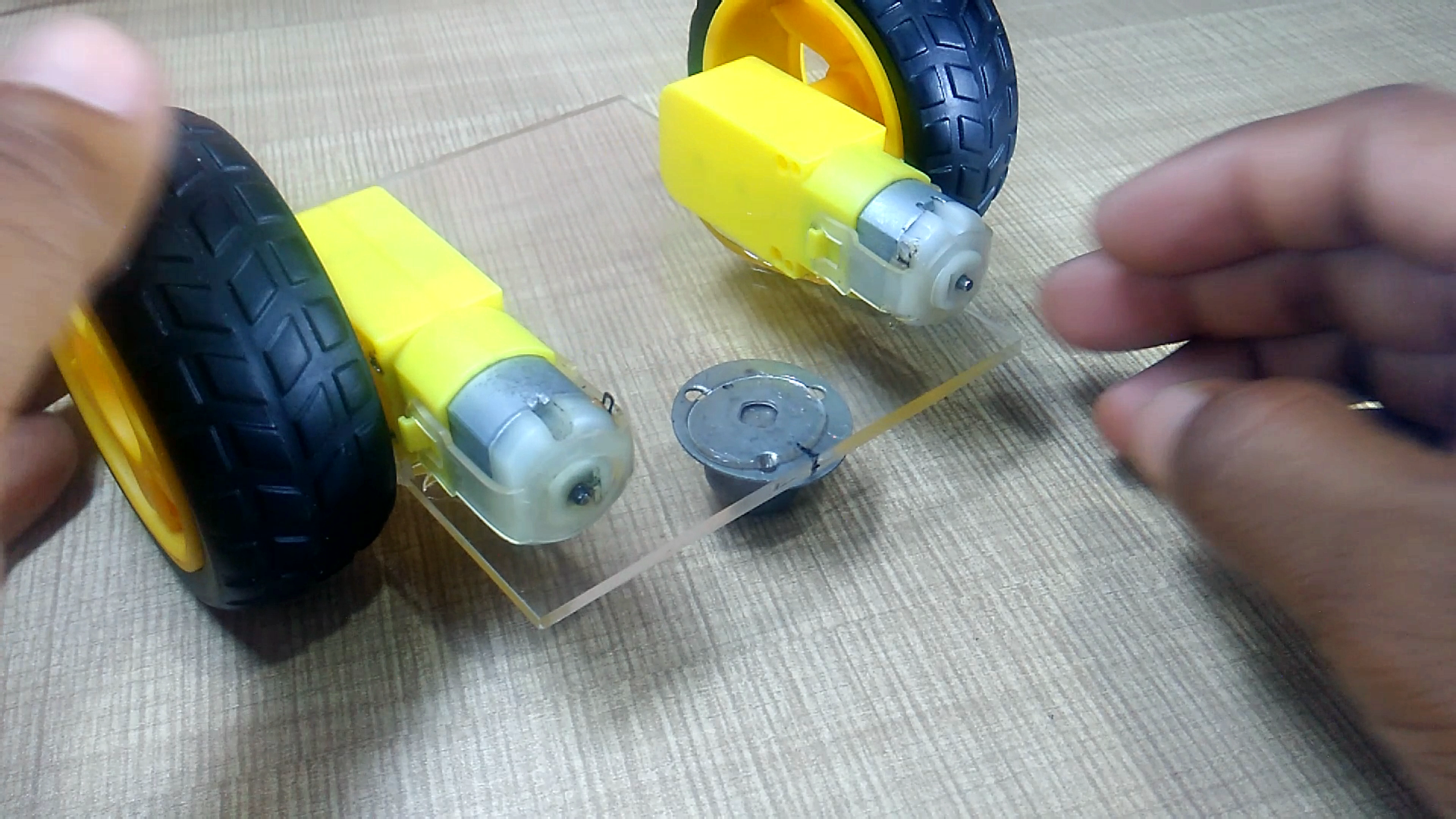
- BO-motor
- Wielen
- Zweefwiel
- L293d IC
- PCB
- Flexibele draad
- Batterij
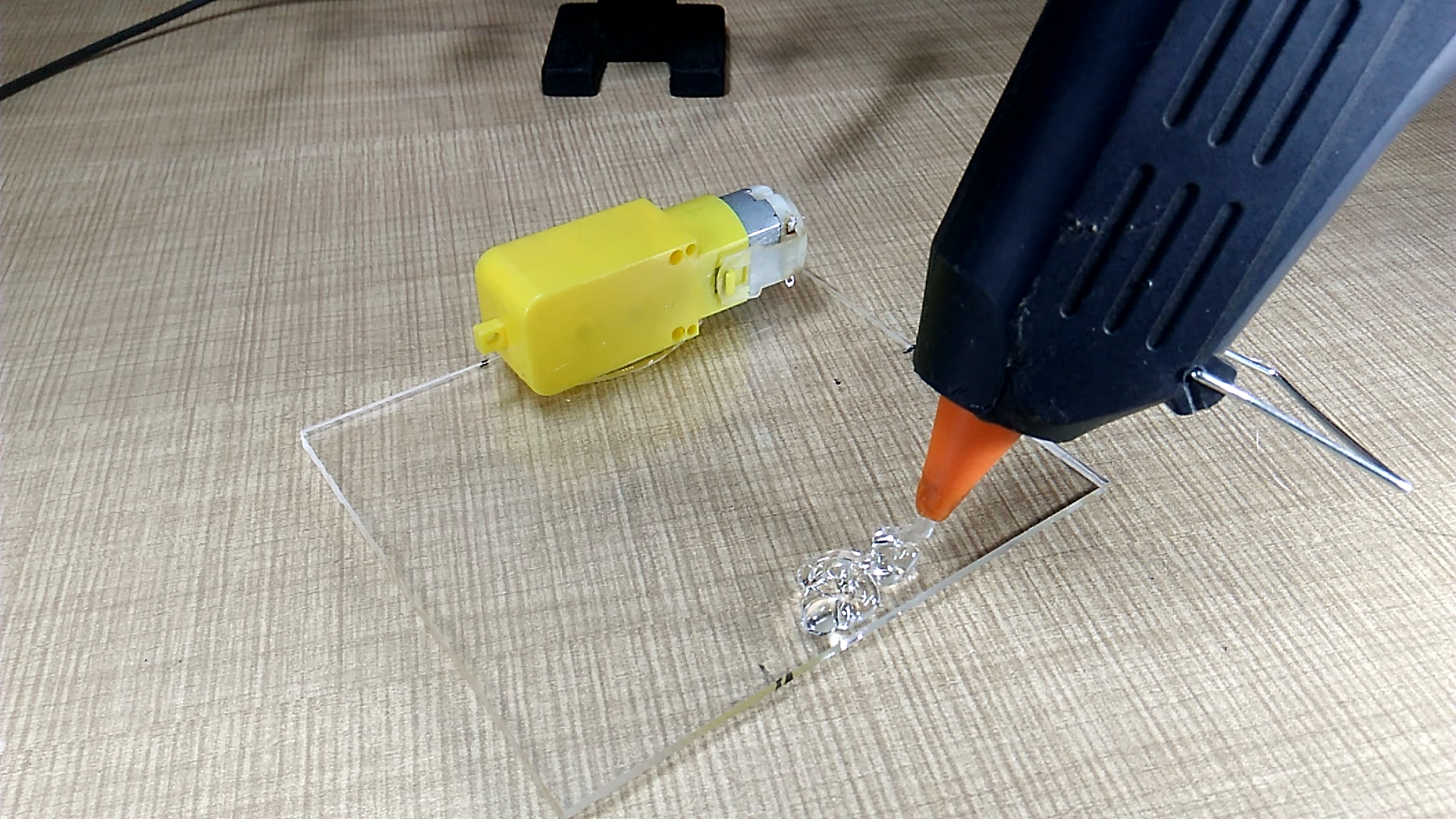
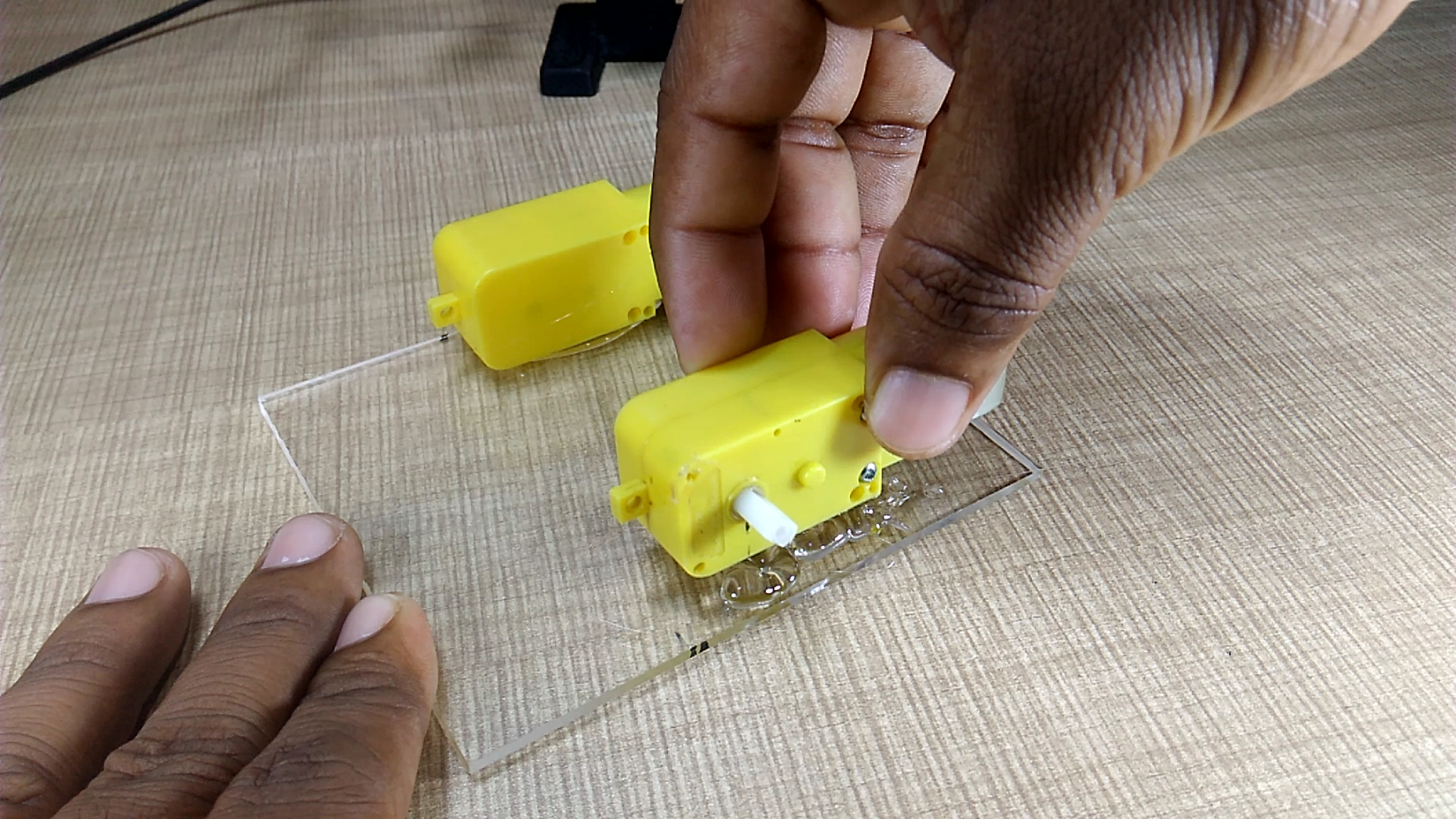
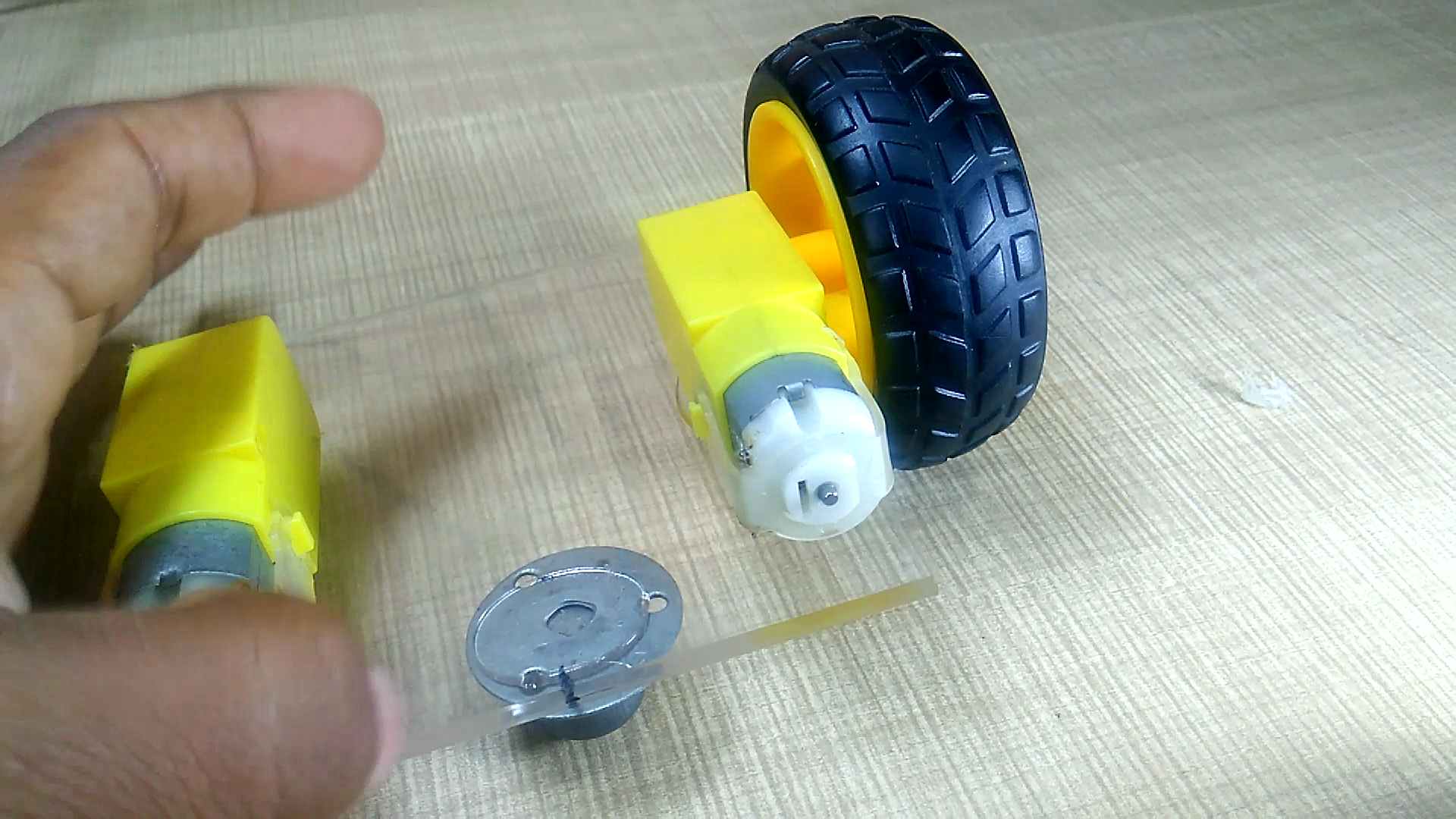
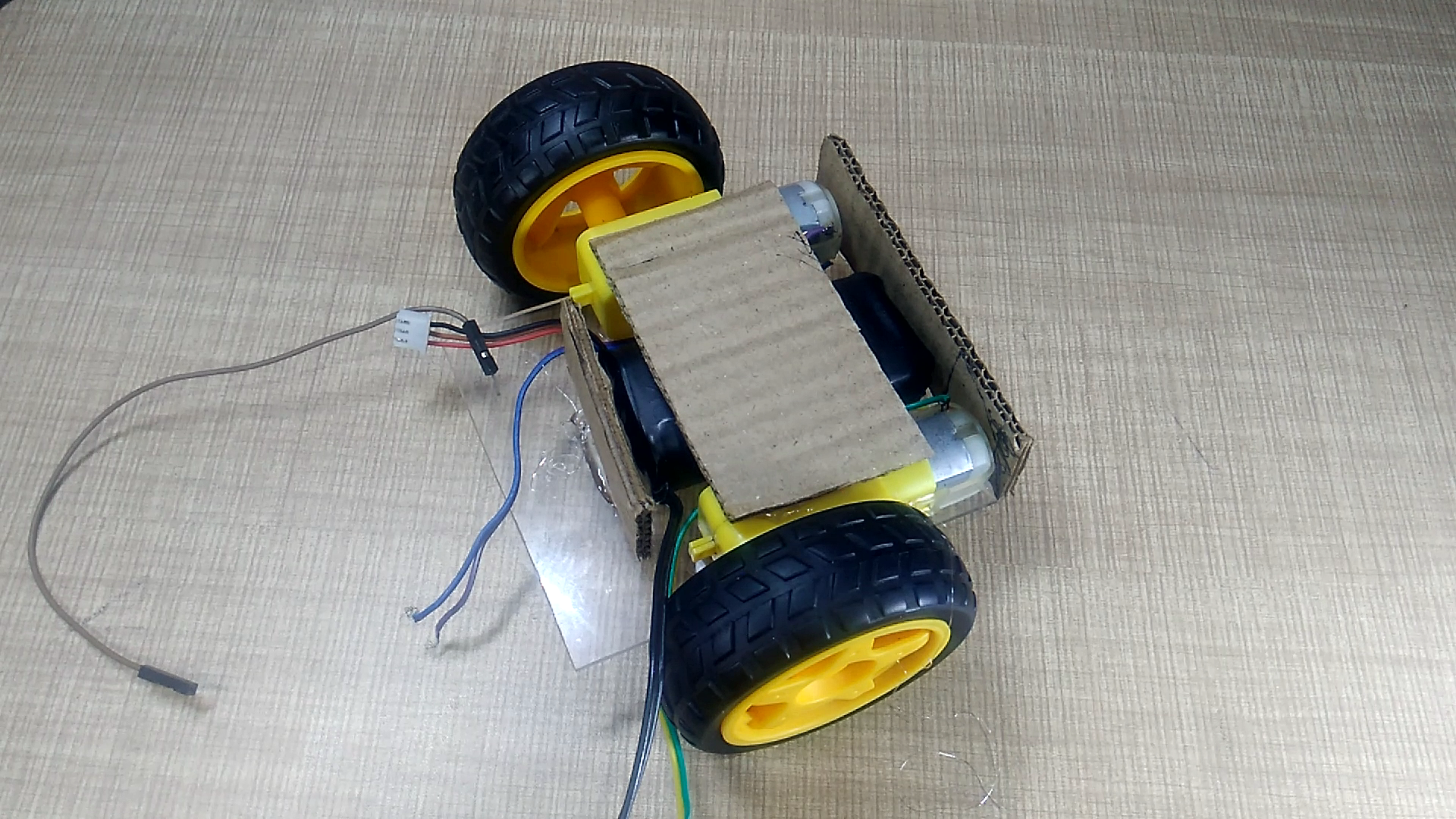
Bevestig alle componenten op acrylplaat en maak een chassis zoals op de foto's.


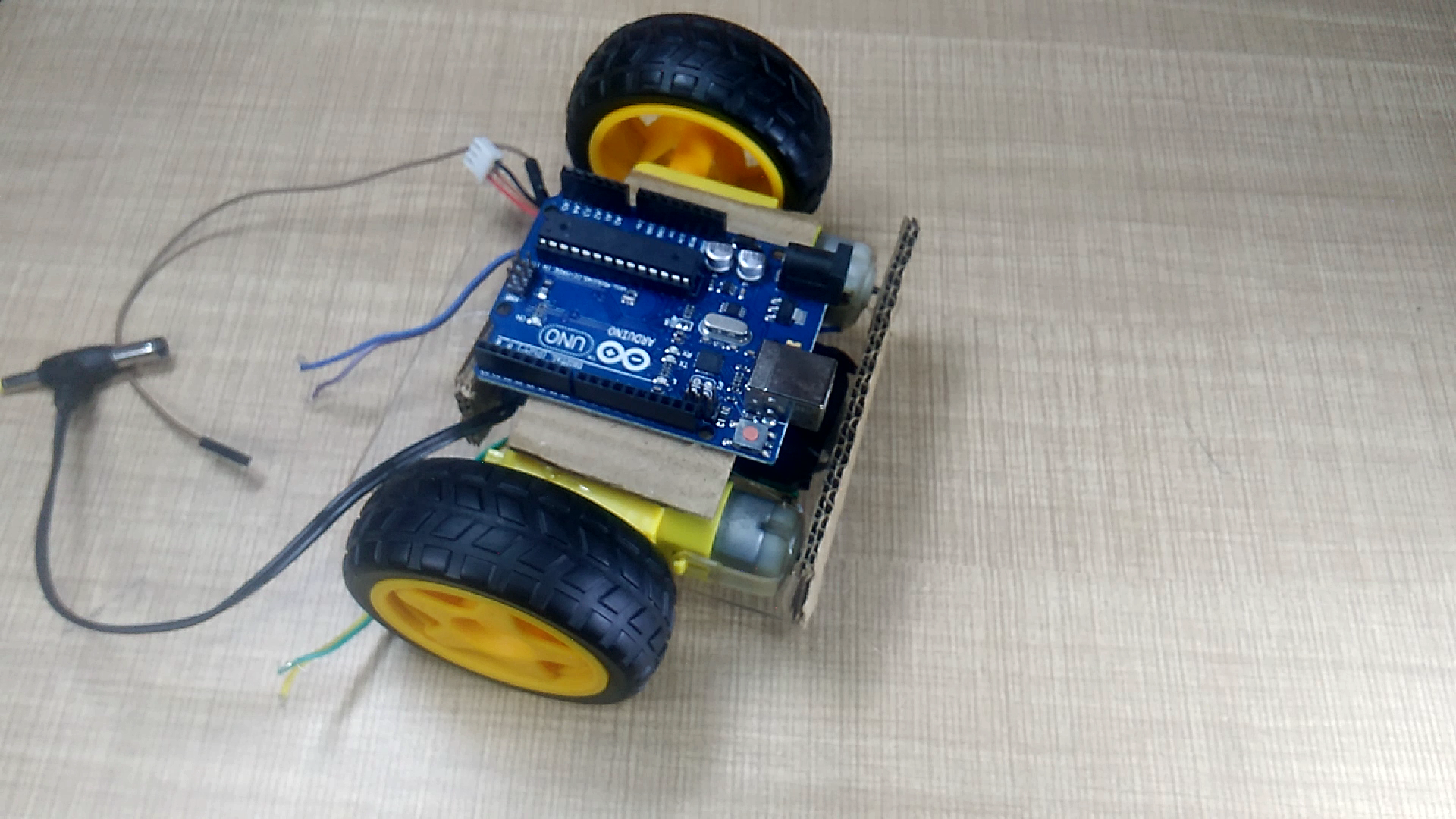

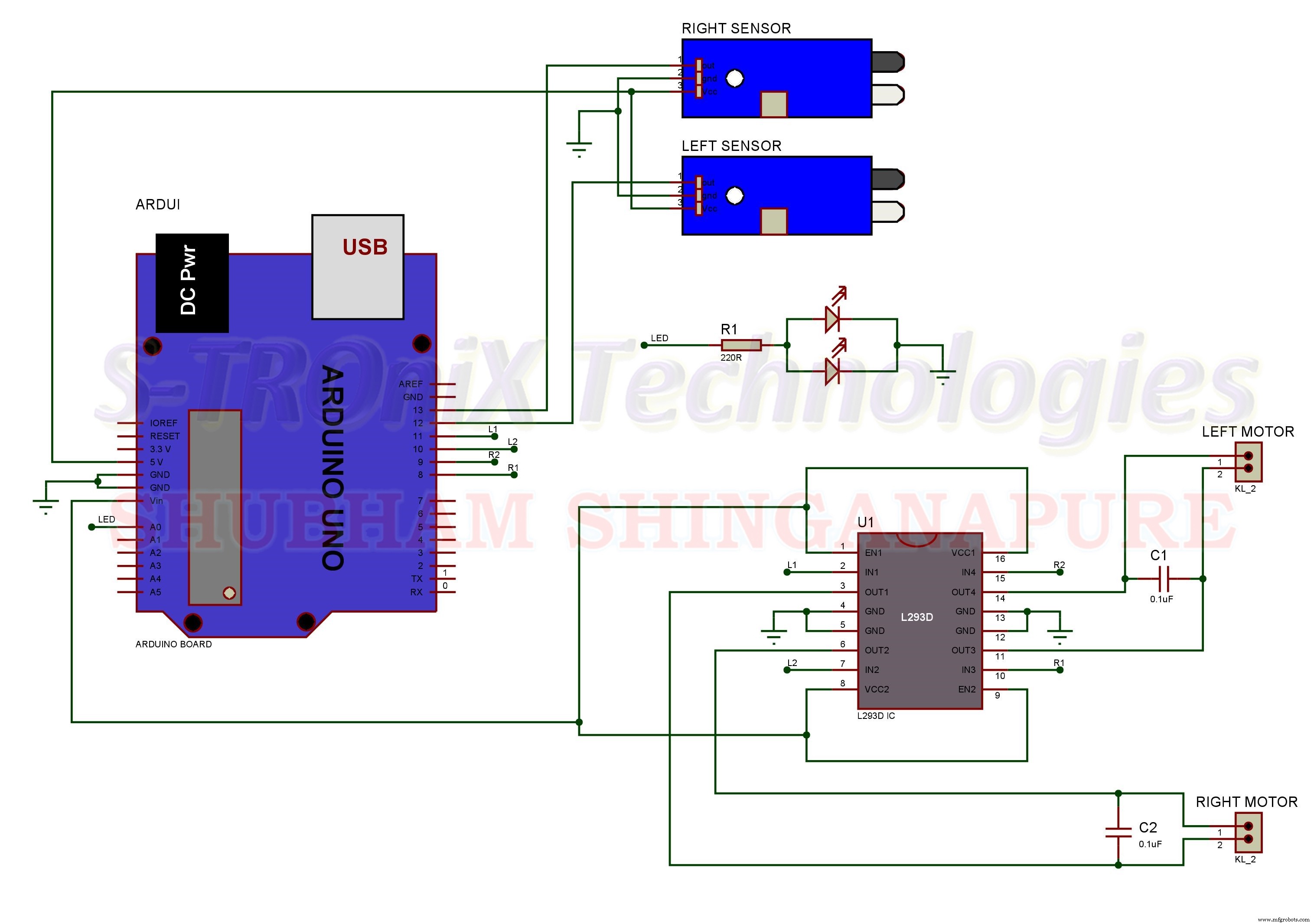
Maak nu alle verbindingen volgens het onderstaande schakelschema.
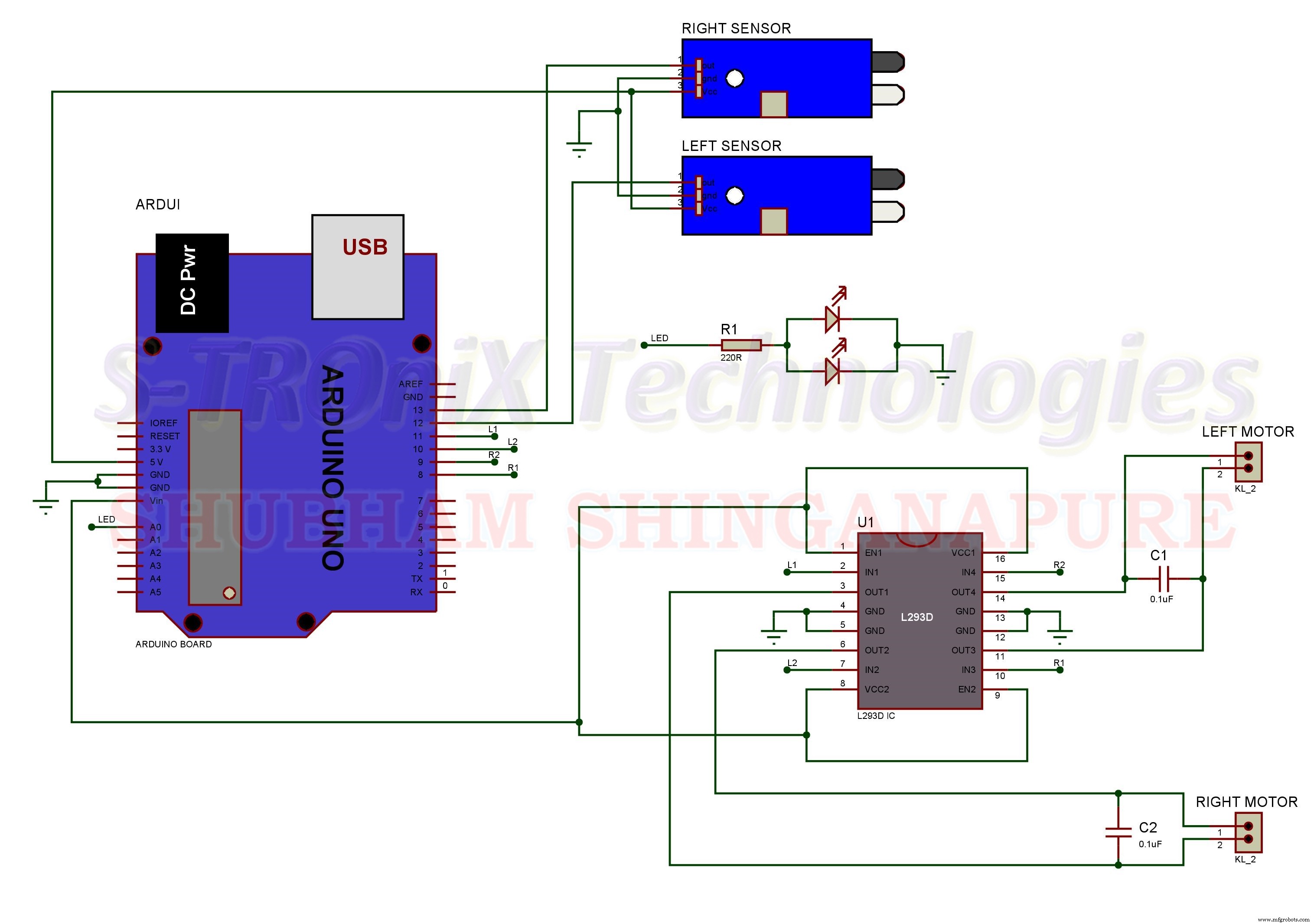
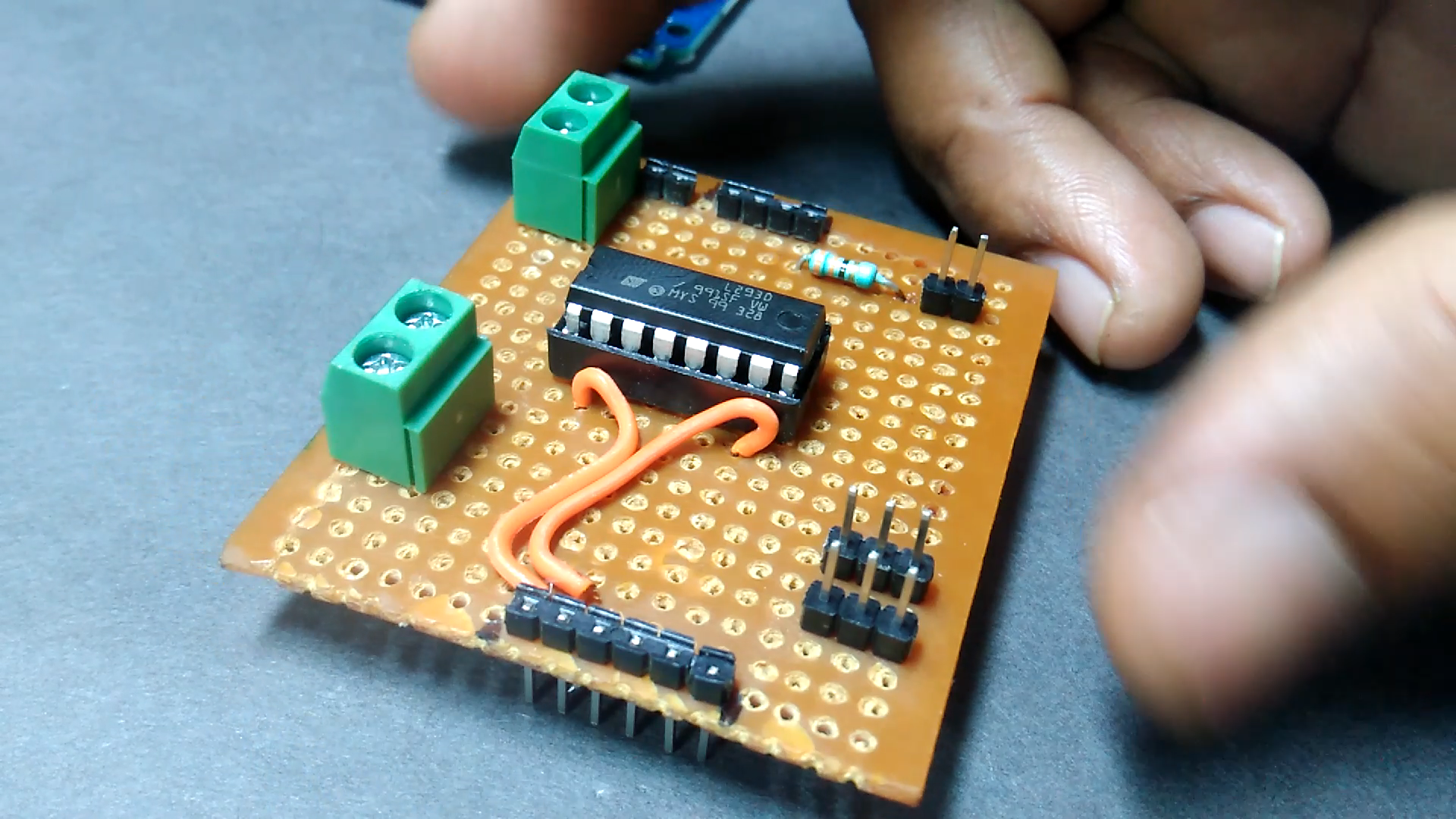
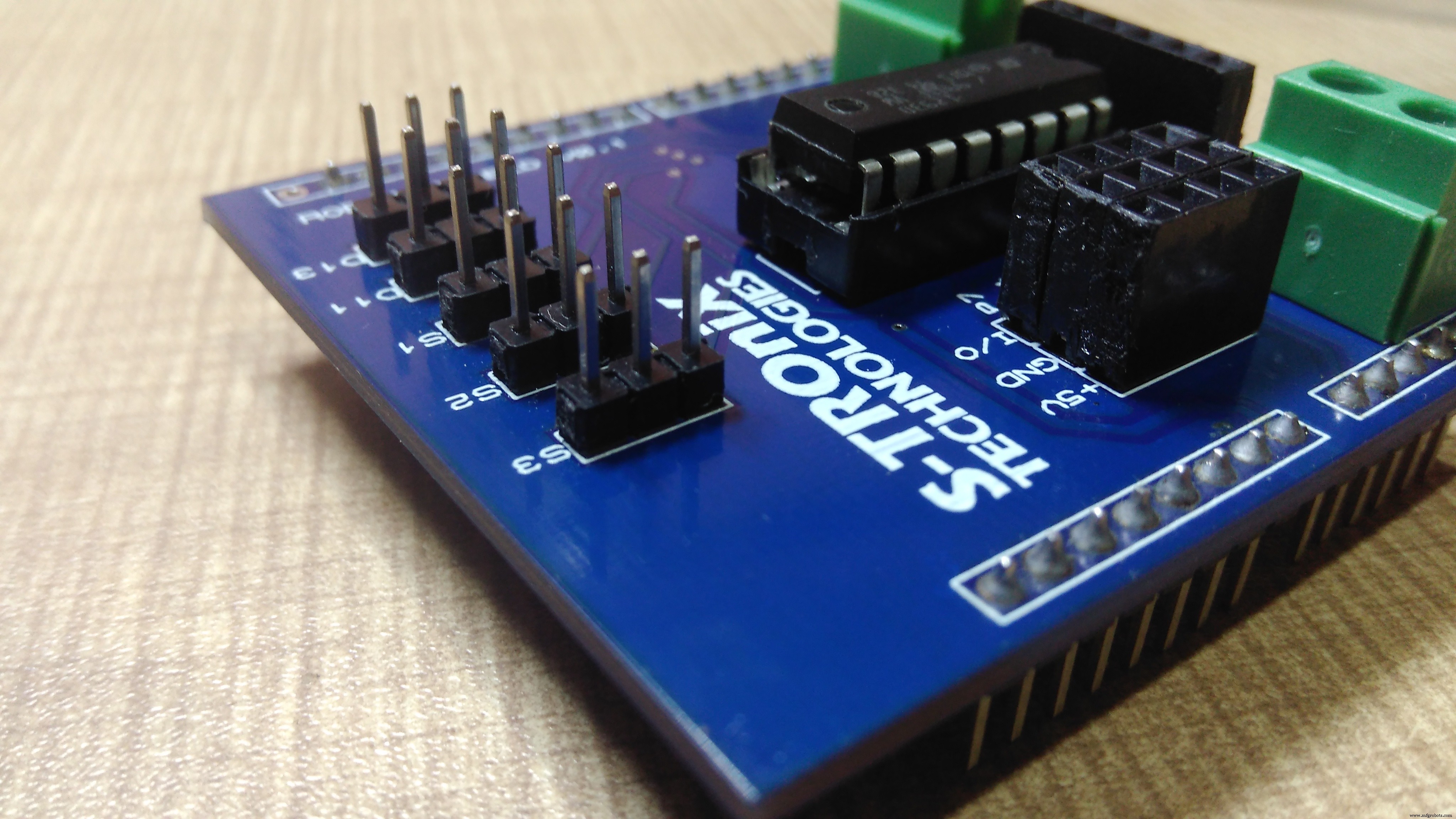
je kunt dit circuit zo maken op een gestippelde pcb.
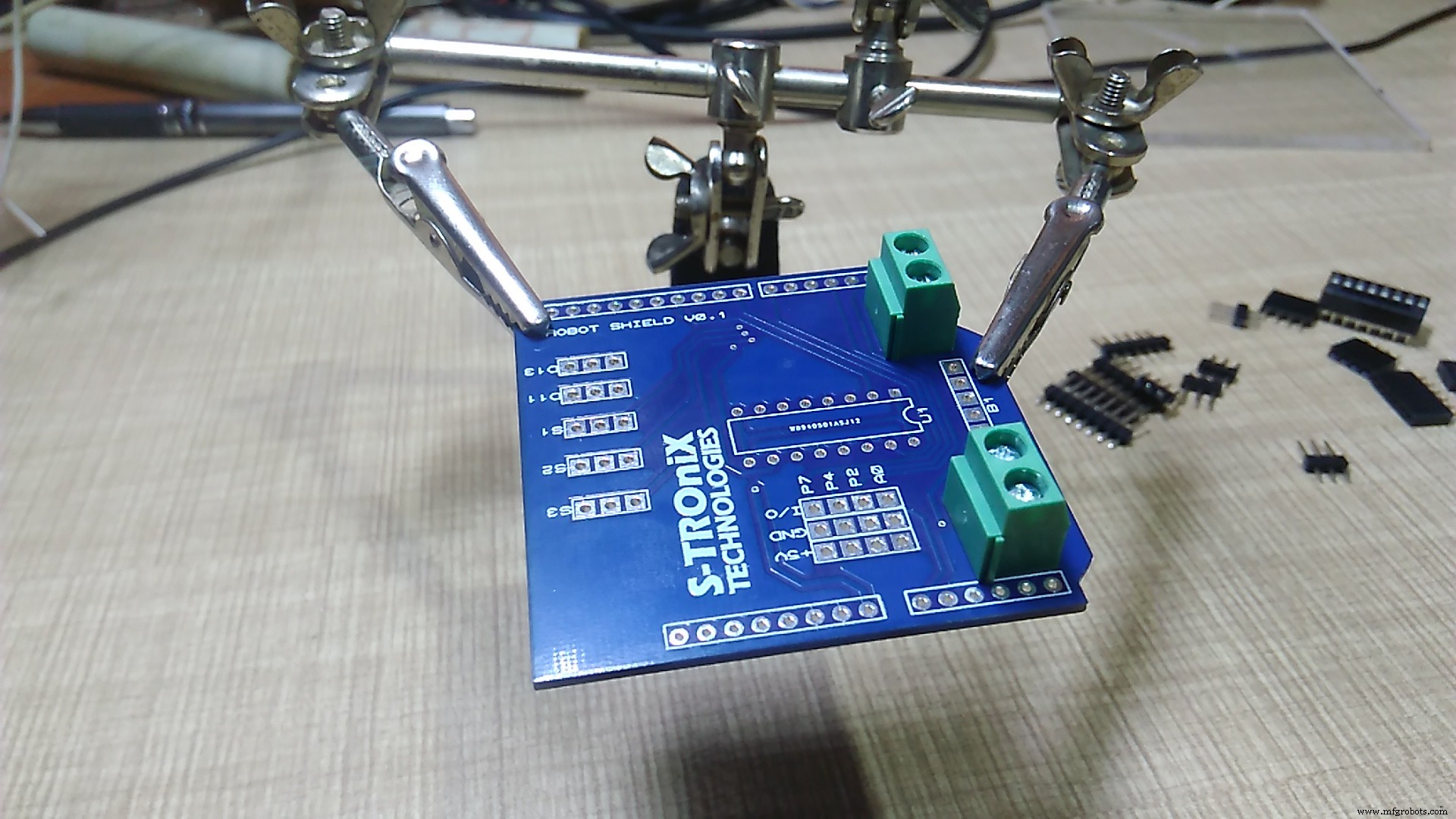
of kan dit type professioneel ogende PCB gebruiken.
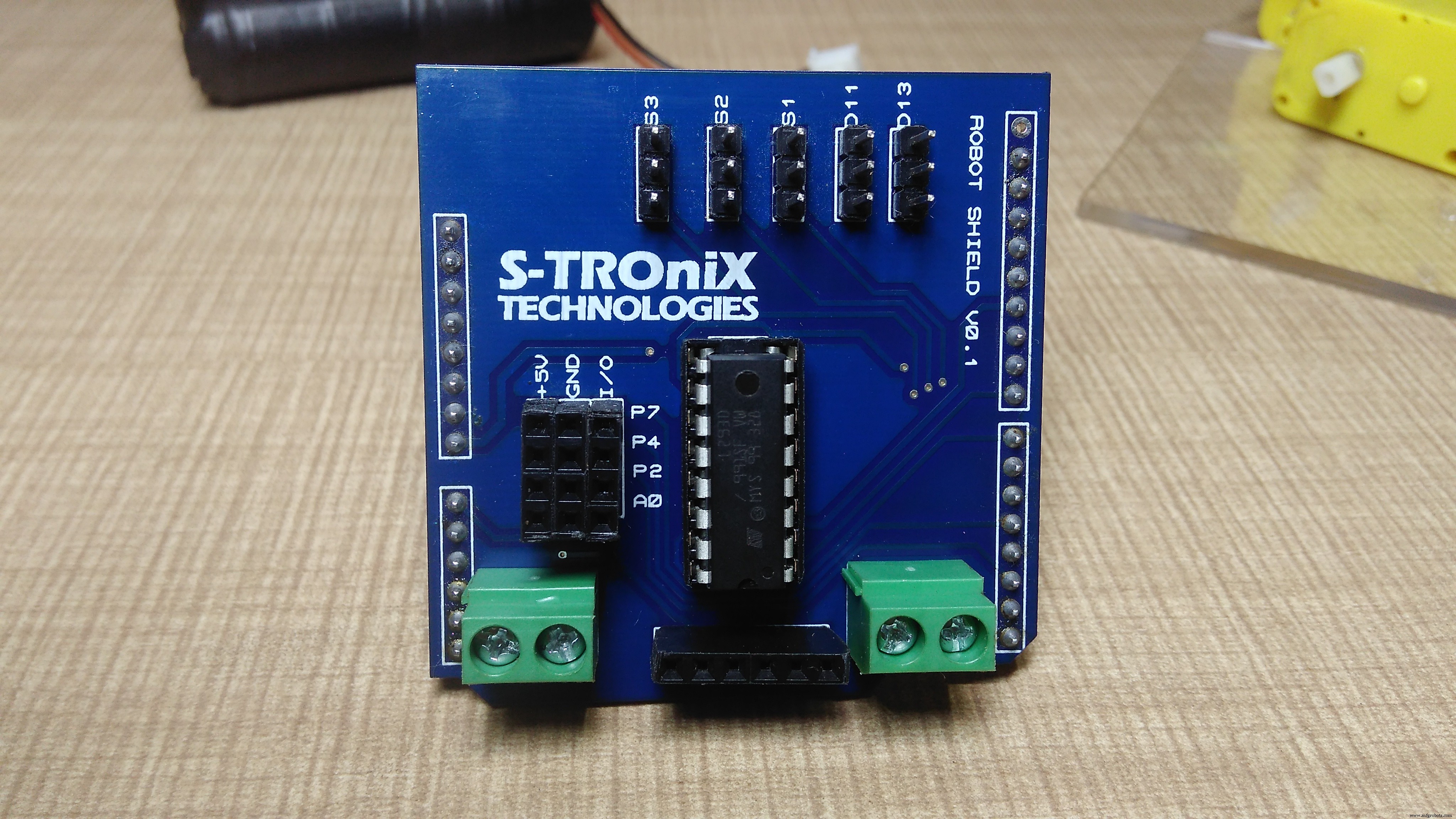
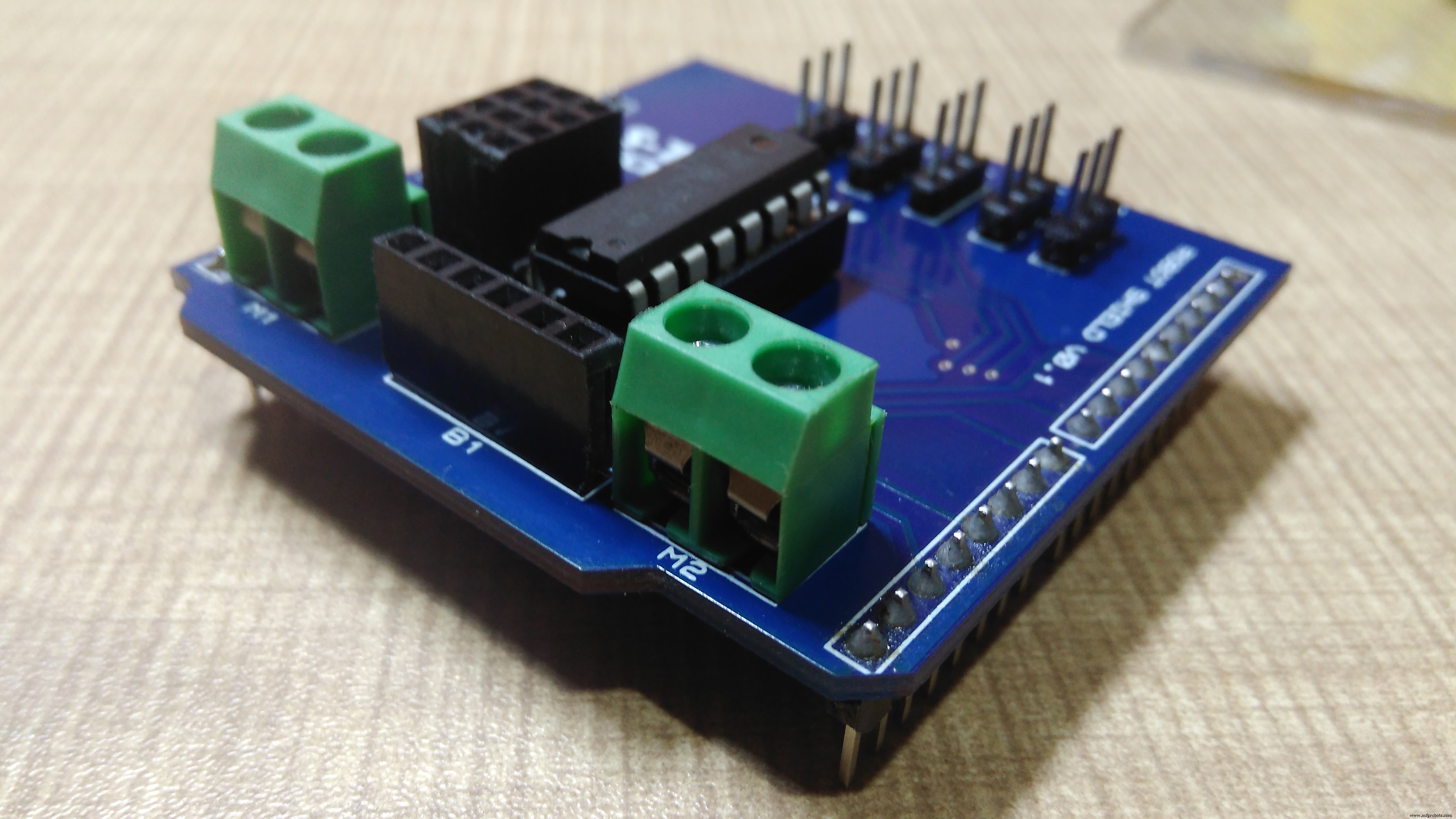
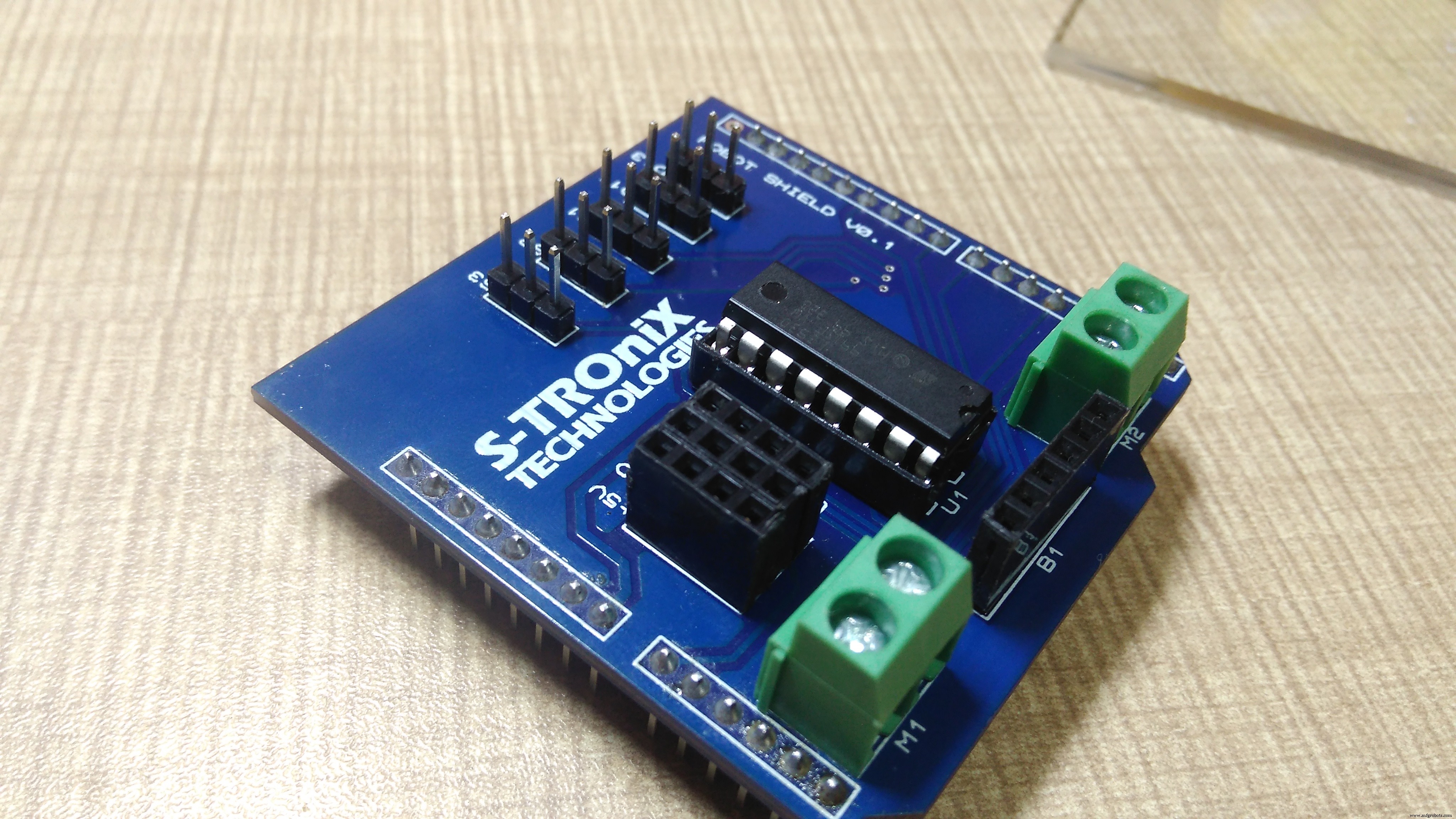
u kunt PCB's voor dit schild hier bestellen https://www.pcbway.com/project/shareproject/How_to_Make_Arduino_Based_Edge_Avoiding_Robot.html
of neem voor een kant-en-klaar schild contact met ons op via:https://www.facebook.com/STRoniXTechnologies
Nu is het tijd om deze robot te programmeren. upload dit programma naar arduino en klaar.
//program by Shubham Shinganapure op 05-08-2019
//
//voor lijnvolgende robot met 2IR-sensoren
int lm1=8; //linker motoruitgang 1
int lm2=9; //linker motoruitgang 2
int rm1=10; //rechter motoruitgang 1
int rm2=11; //rechter motoruitgang 2
int sl=13; //sensor 1 ingang (links)
int sr=12; //sensor 2 ingang (rechts)
int SlV=0;
int SrV=0;
int led=A0;
void setup()
{
pinMode(lm1,OUTPUT);
pinMode(lm2,OUTPUT);
pinMode(rm1,OUTPUT);
pinMode(rm2,OUTPUT);
pinMode(led, OUTPUT);
pinMode(sl,INPUT);
pinMode(sr,INPUT);
sTOP();
}
void loop()
{
SlV=digitalRead(sl);
SrV=digitalRead(sr);
if(SrV==LAAG &&SlV==LAAG)
{
ForWard( );
}
if(SrV==HOOG &&SlV==LAAG)
{
Links();
}
if(SrV==LAAG &&SlV==HOOG)
{
Rechts();
}
if(SrV==HOOG &&SlV==HOOG)
{
sTOP();
}
}
void ForWard()
{
digitalWrite(lm1,HIGH);
digitalWrite(lm2,LOW);
digitalWrite(rm1,HIGH);
digitalWrite(rm2,LOW);
}
void BackWard()
{
digitalWrite(lm1,LOW);
digitalWrite(lm2,HIGH);
digitalWrite(rm1,LOW);
digitalWrite(rm2,HIGH);
}
void Left()
{
digitalWrit e(lm1,LOW);
digitalWrite(lm2,HIGH);
digitalWrite(rm1,HIGH);
digitalWrite(rm2,LOW);
}
void Right()
{
digitalWrite(lm1,HIGH);
digitalWrite(lm2,LOW);
digitalWrite(rm1,LOW);
digitalWrite(rm2,HIGH );
}
void sTOP()
{
digitalWrite(lm1,LOW);
digitalWrite(lm2,LOW);
digitalWrite(rm1, LAAG);
digitalWrite(rm2,LAAG);
} Abonneer je op mijn YouTube-kanaal voor meer:
Code
- lijnvolgerrobot
lijnvolgerrobotArduino
//programma door Shubham Shinganapure op 05-08-2019////voor Lijnvolgende Robot met 2IR-sensoren int lm1=8; // linker motoruitgang 1int lm2=9; // linker motoruitgang 2int rm1=10; // rechter motoruitgang 1int rm2=11; // rechter motoruitgang 2int sl=13; // sensor 1 ingang (links) int sr =12; // sensor 2 ingang (rechts) int SlV =0; int SrV =0; int led =A0; ongeldige setup () {pinMode (lm1, OUTPUT); pinMode (lm2, UITGANG); pinMode (rm1, UITGANG); pinMode (rm2, UITGANG); pinMode (led, UITGANG); pinMode(sl,INPUT); pinMode(sr,INPUT);sTOP();}void loop(){ SlV=digitalRead(sl); SrV=digitalRead(sr); if (SrV==LAAG &&SlV==LAAG) { ForWard(); } if(SrV==HOOG &&SlV==LAAG) { Links(); } if(SrV==LAAG &&SlV==HOOG) { Rechts(); } if(SrV==HOOG &&SlV==HOOG) { sTOP(); }}void ForWard() { digitalWrite(lm1,HIGH); digitalWrite(lm2,LAAG); digitalWrite(rm1,HIGH); digitalWrite(rm2,LAAG); } void BackWard() {digitalWrite(lm1,LOW); digitalWrite(lm2,HIGH); digitalWrite(rm1,LAAG); digitalWrite(rm2,HOOG); } void Left() {digitalWrite(lm1,LOW); digitalWrite(lm2,HIGH); digitalWrite(rm1,HIGH); digitalWrite(rm2,LAAG); } void Right() { digitalWrite(lm1,HIGH); digitalWrite(lm2,LAAG); digitalWrite(rm1,LAAG); digitalWrite(rm2,HOOG); } void sTOP() {digitalWrite(lm1,LOW); digitalWrite(lm2,LAAG); digitalWrite(rm1,LAAG); digitalWrite(rm2,LAAG); } Schema's
Productieproces
- Raspberry Pi-robot bestuurd via Bluetooth
- Simple Pi Robot
- Obstakels vermijden robot met servomotor
- Joy Robot (Robô Da Alegria)
- Speed Line Follower Robot V4
- Spraakgestuurde robot
- Arduino-gestuurde pianorobot:PiBot
- Arduino-trainingsplatform
- Autonome Home Assistant-robot
- PID-regellijnvolgerrobot
- Robot voor supercoole indoornavigatie