


Maak een eetrobot met Arduino Nano | Gouden schroef
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Benodigde gereedschappen en machines
 |
|
Apps en online services
 |
| |||
 |
|
Over dit project
Het idee voor dit project kwam van mijn dochter.
Ze wil een robot, en deze robot kan zijn mond openen zodat hij voedsel in zijn mond kan stoppen.
Dus ik zocht binnenshuis naar dingen die beschikbaar waren:karton, Arduino Nano, ultrasone sensor, servomotor... om een robot voor meisjes te kunnen maken om in de snelste tijd en tegen de laagst mogelijke kosten te spelen.
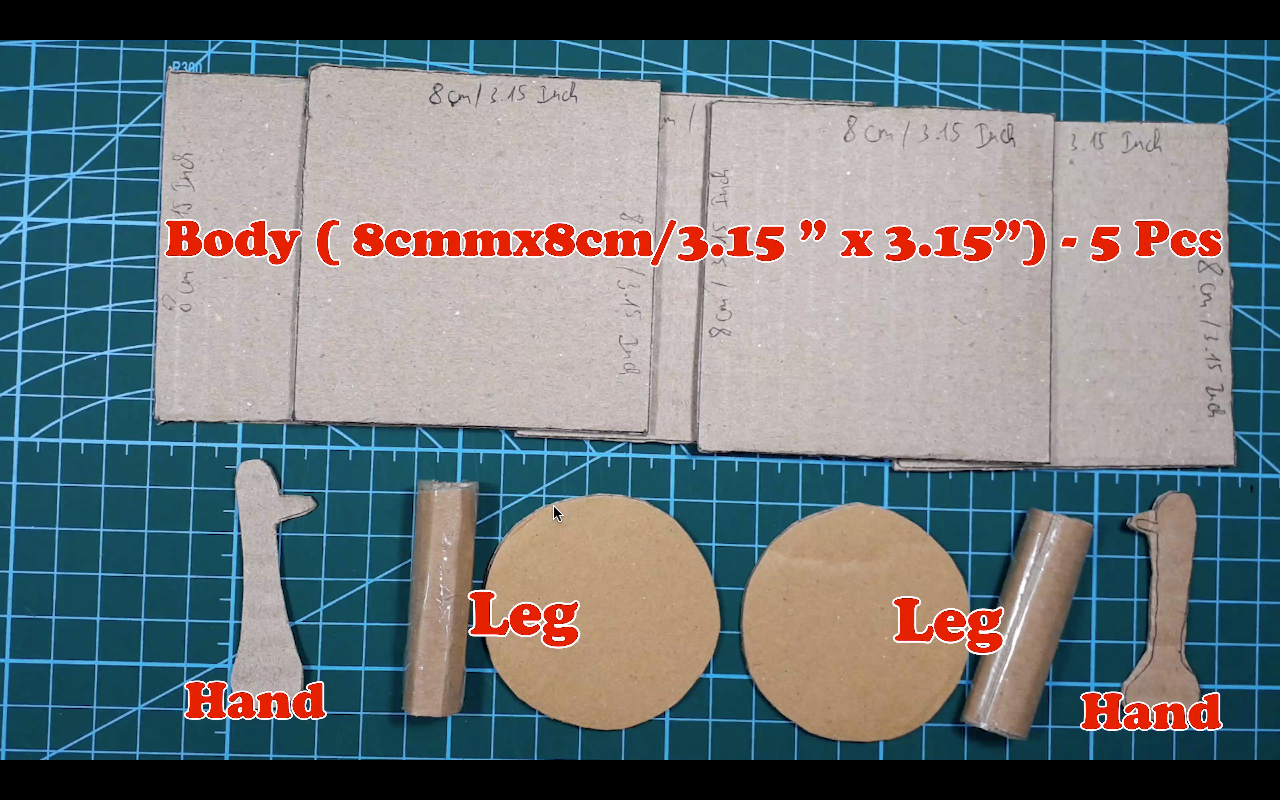
Creëer lichaam
Ik gebruik karton om het lichaam van een robot te maken
Hete lijm gebruiken om alle onderdelen te verbinden
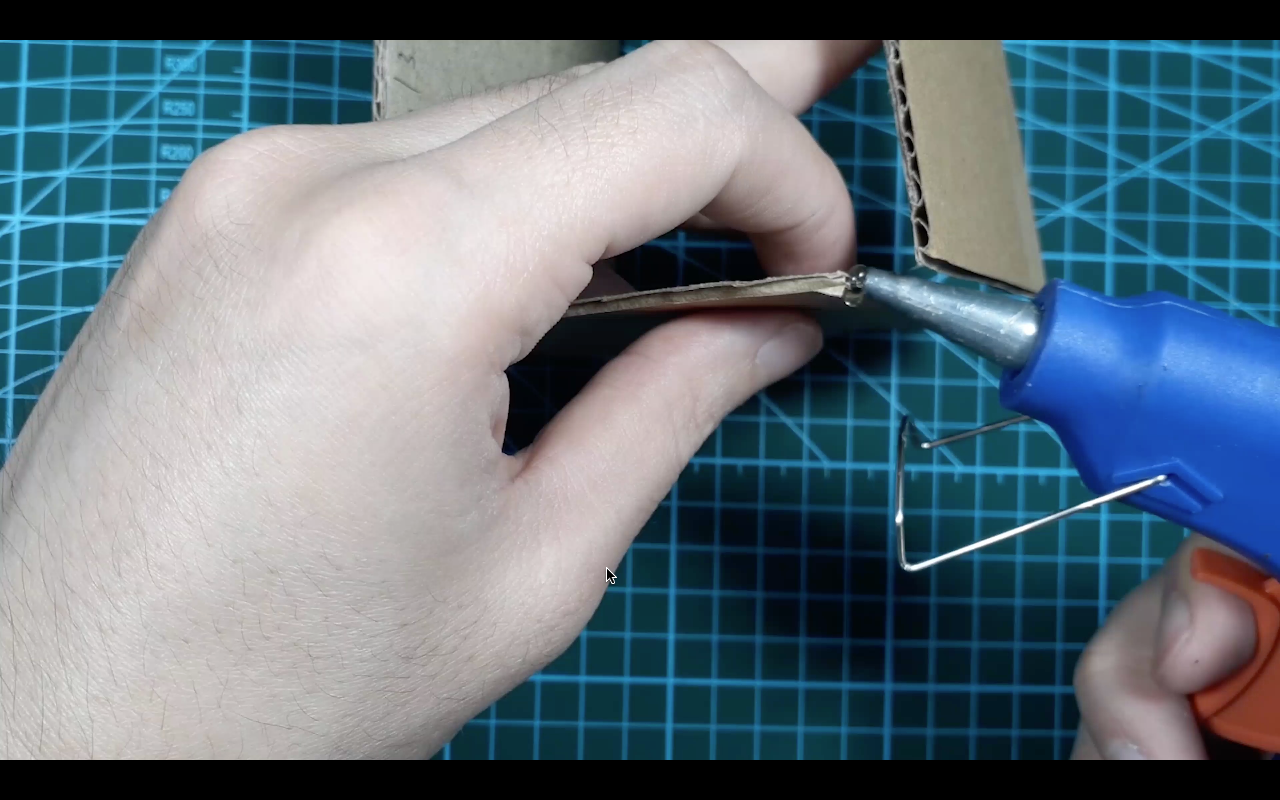
Het meeste lichaam gedaan

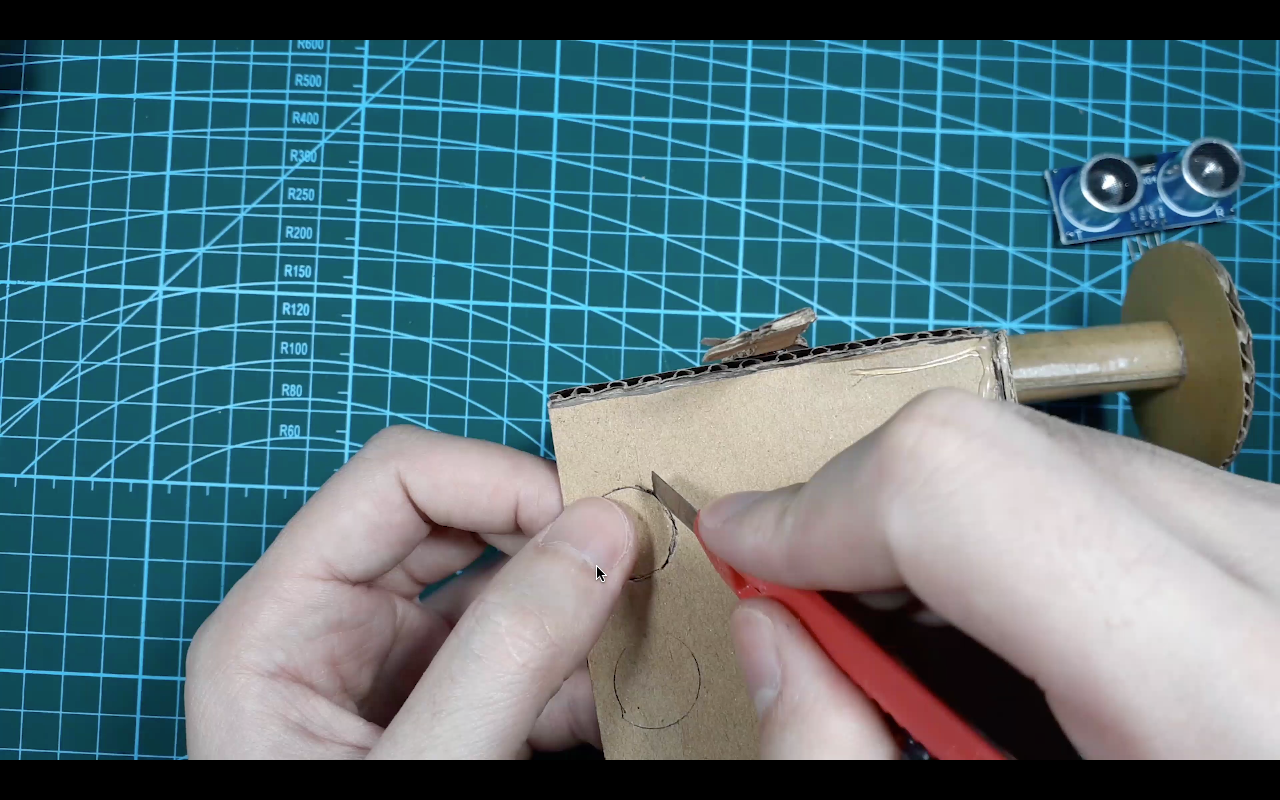
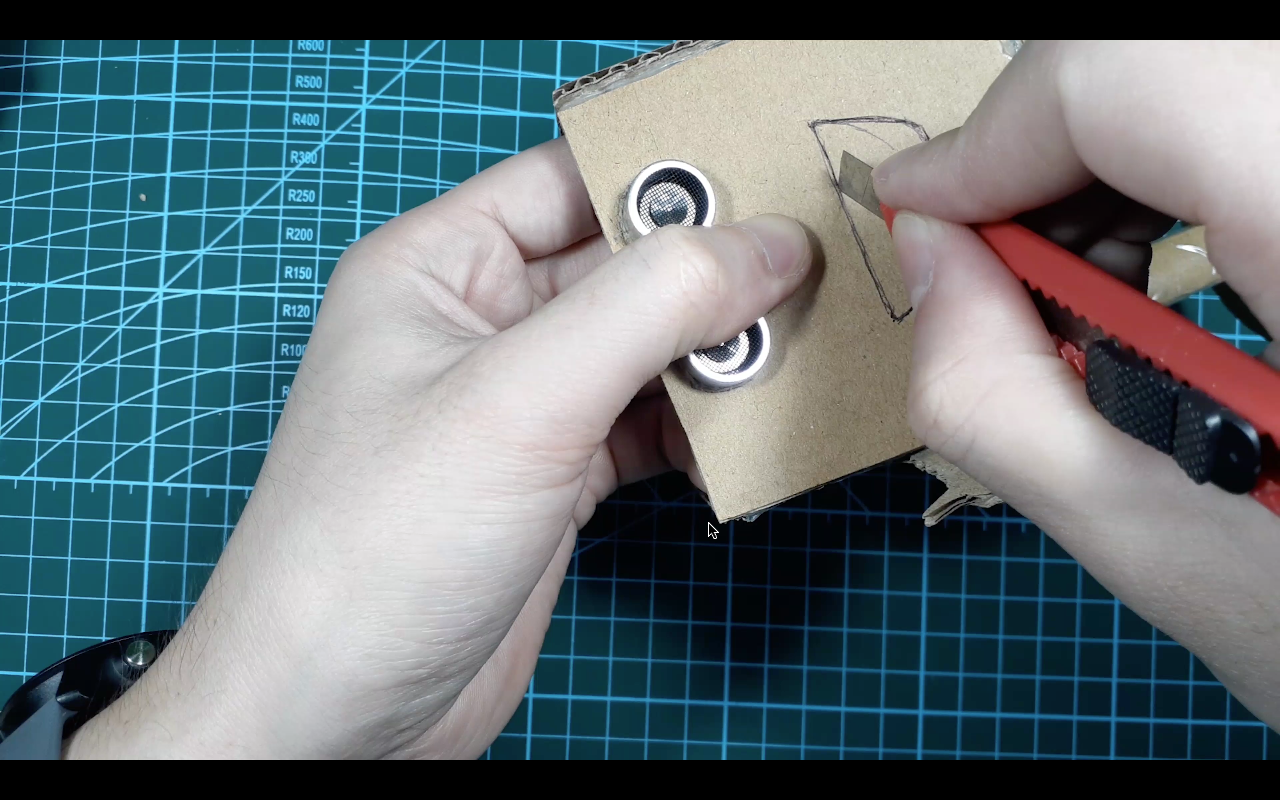
Ooggaten maken
Maak mond
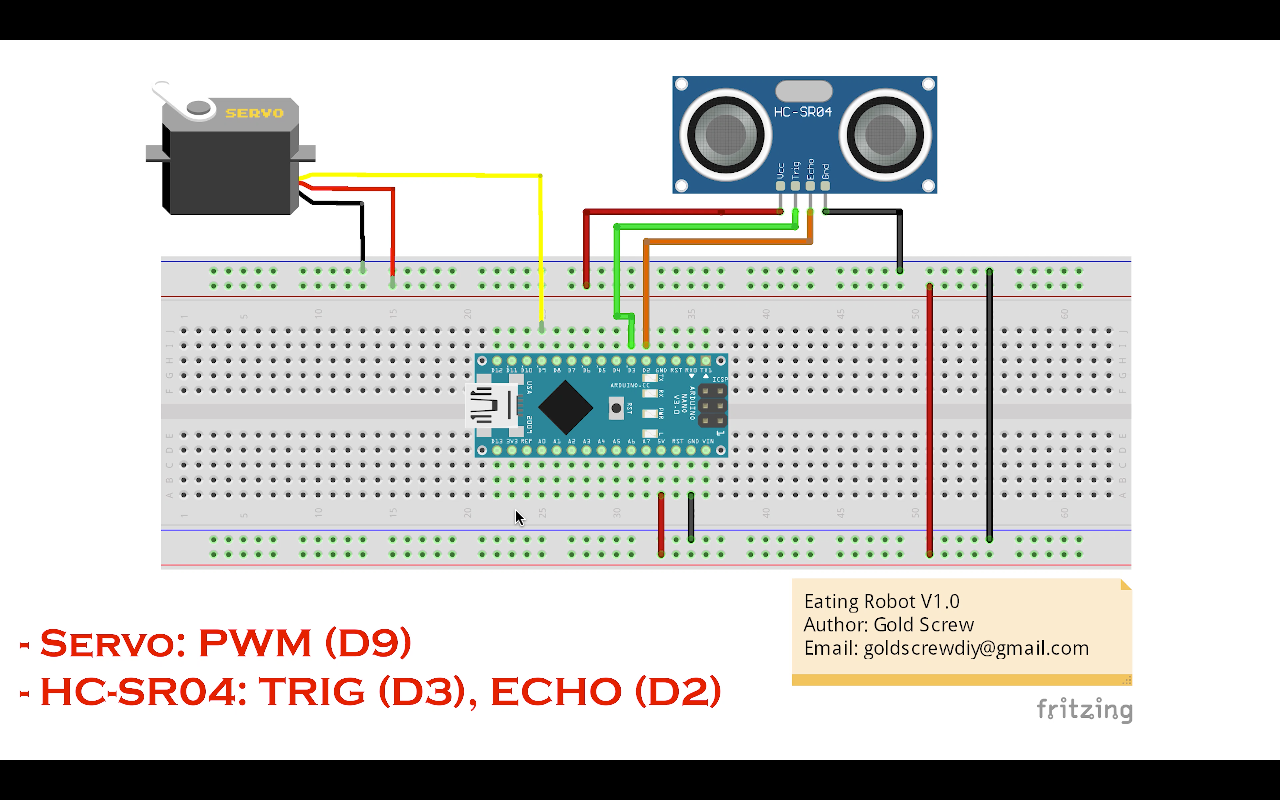
Componenten/onderdelen aansluitschema
USB-voeding aansluiten
Testen en debuggen
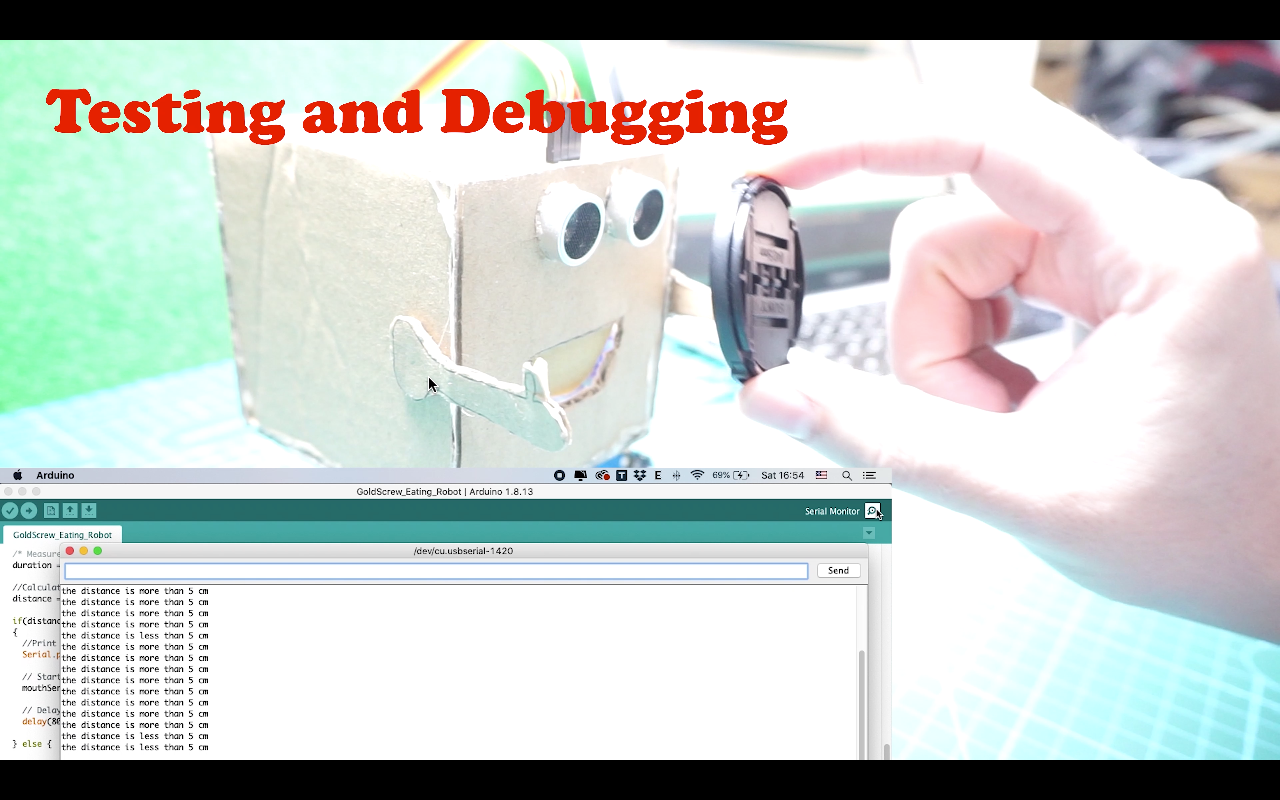
Het is klaar!

Code
- GoldScrew_EatingRobot.ino
GoldScrew_EatingRobot.inoArduino
/* * Kartonnen etende robot * Auteur:GoldScrew * E-mail:[email protected] * Beschrijving:Het gebruikt HC-SR04 (Voedsel detecteren op afstand <=5 cm) en Server (om de mond te openen en te sluiten) * / #include#define SERVO_PIN 9 // Stel pin 9 in voor servo// HC-SR04 ultrasone sensorconst int trig =3; // trig van HC-SR04const int echo =2; // echo van HC-SR04// ServoServo mouthServo;void setup(){ // Seriële verbinding met baudrate 960 Serial.begin (9600); // Stuur signaal met TRIG pinMode (trig, OUTPUT); // Ontvang signaal met ECHO pinMode (echo, INPUT); // Mondserver mondServo.attach (SERVO_PIN); mondServo.write(90); }void loop(){ /* Duur */ niet-ondertekende lange duur; int afstand; //Afstand /* Stuur signaal van TRIG-pin */ digitalWrite (trig, 0); //Stop trig pin vertraging Microseconden (2); // Vertraging 2 microseconden digitalWrite (trig, 1); //Stuur signaal van TRIG pin delayMicroseconds (10); // Vertraging 10 microseconden digitalWrite (trig, 0); //Stop trig-pin /* Meet HOGE pulsbreedte op ECHO-pin */ duur =pulseIn (echo, HIGH); // Bereken afstand afstand =int (duration/2/29.412); if (afstand <=5) { //Afdrukafstand Serial.println ("de afstand is minder dan 5 cm"); // Start open mond mouthServo.write(0); // Vertragingsvertraging (1200); } else { //Afdrukafstand Serial.println ("de afstand is meer dan 5 cm"); // Sluit de mond mouthServo.write(90); } // Vertragingsvertraging (200);}
Schema's
Productieproces
- Arduino-gyroscoopspel met MPU-6050
- Unopad - Arduino MIDI-controller met Ableton
- Obstakels vermijden robot met servomotor
- Eenvoudige obstakelsensor met Arduino
- Arduino Nano:bedien 2 stappenmotoren met joystick
- Arduino-gestuurde pianorobot:PiBot
- Handheld geigerteller met Arduino Nano
- Muziek maken met een Arduino
- Hoe maak je op Arduino gebaseerde automatische deuropening
- Bedien de Arduino-robotarm met Android-app
- 4-wiel robot gemaakt met Arduino bestuurd met behulp van Dabble