


4-wiel robot gemaakt met Arduino bestuurd met behulp van Dabble
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Apps en online services
 |
| |||
|
Over dit project
Een ander project, een ander out-of-the-box cadeau-idee! We presenteren u de door Dabble bestuurde robot met vier wielen - een eenvoudig en leuk te bouwen en gemakkelijk te besturen robot die kan worden bestuurd via Bluetooth met behulp van Dabble, een mobiele applicatie die oorspronkelijk door ons is ontwikkeld. Alles wat je nodig hebt om je robot te maken, is een Arduino Uno-bord, chassis, wielen, motorassen en andere accessoires en gereedschappen. Om het te bedienen, moet je Dabble installeren vanuit Google Play en het koppelen met Bluetooth; en je robot is klaar om overal naartoe te gaan!
Wat is een betere manier om het jaar af te sluiten met dezelfde doe-het-zelfgeest waarmee het begon, toch? Dus waar wacht je op!
Dus laten we beginnen!
Stap 1:Dingen die je nodig hebt
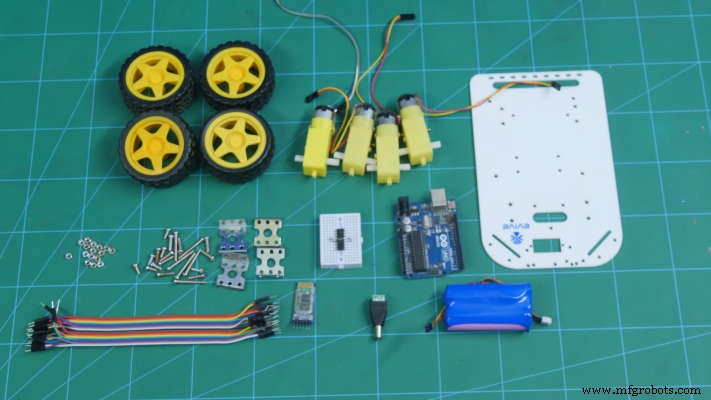
- Arduino Uno-bord
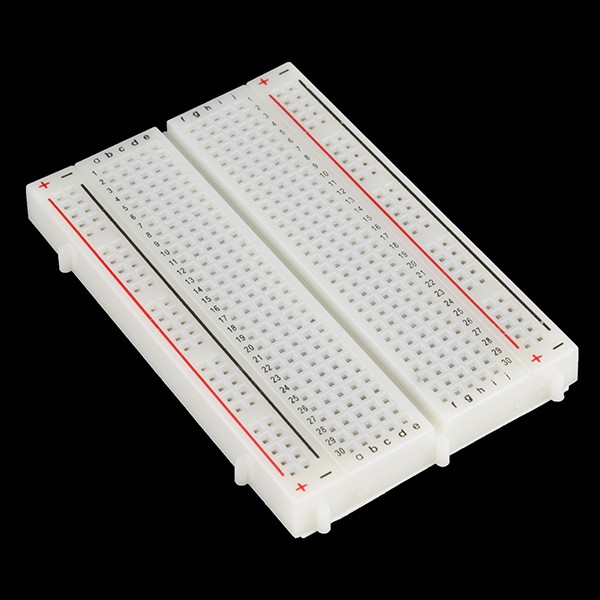
- Broodplank
- Chassis
- Motorsteunen
- DC-motoren
- Wiel
- Motorrijder
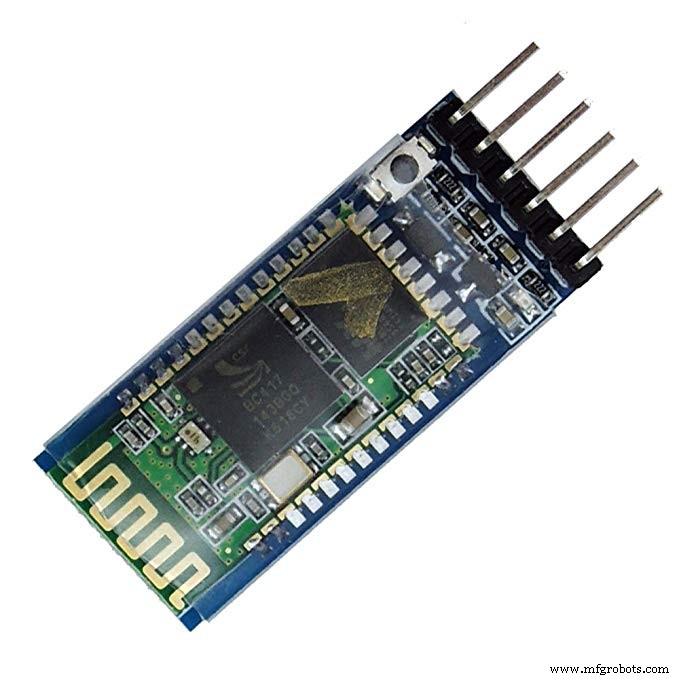
- Bluetooth-module HC05
- DC-aansluitblok
- Batterij
- Jumperkabels
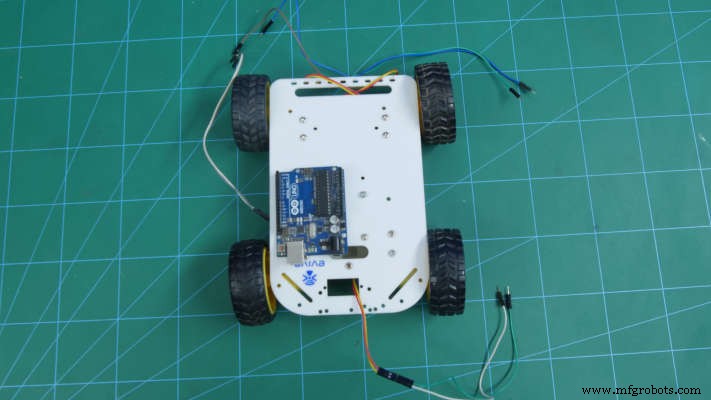
Stap 2:Maken van het lichaam
Eerst beginnen we met het maken van de carrosserie van de 4 Wheel Robot.
Pak het chassis en draai het ondersteboven.

Monteer op dit chassis 4 motorsteunen met M3-bouten en moeren.
Bevestig de gelijkstroommotoren en bevestig ze op de motorsteunen met behulp van M2 moeren en bouten.
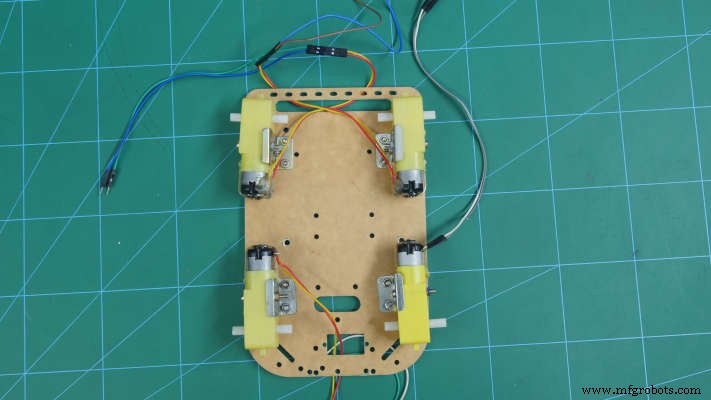
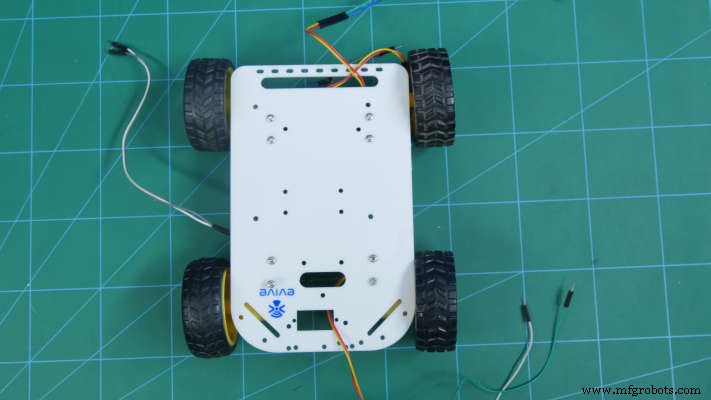
Bevestig wielen op elke as van de DC-motor.

Draai het geheel om, zo wordt je lichaam gecreëerd.
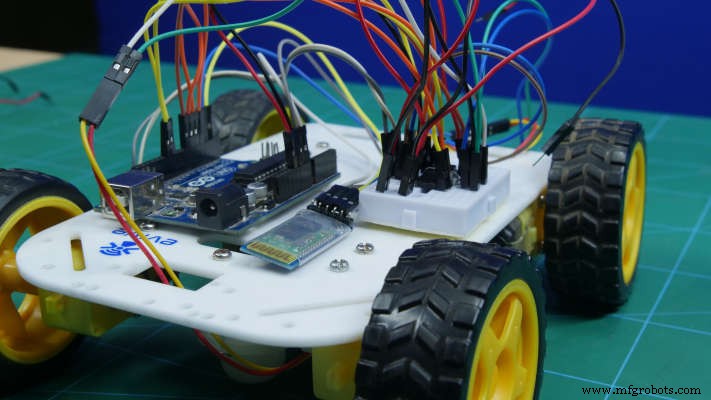
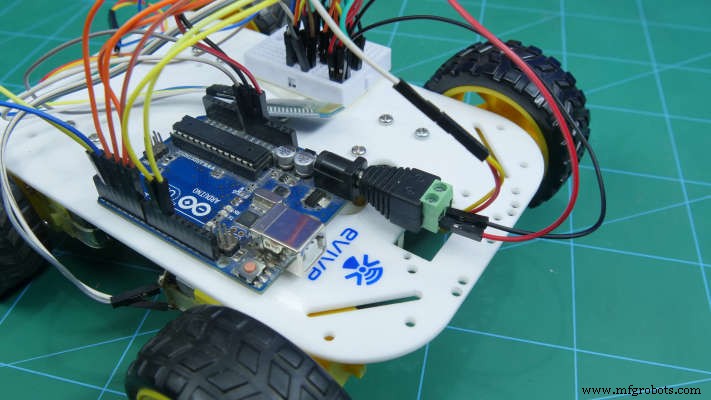
Stap 3:De hersenen toevoegen
De microcontroller die we gaan gebruiken is Arduino Uno.

We gaan er alle aansluitingen op maken, maar we gaan ook een breadboard gebruiken om de aansluitingen te maken.
Stap 4:Verbindingen maken en motorstuurprogramma gebruiken
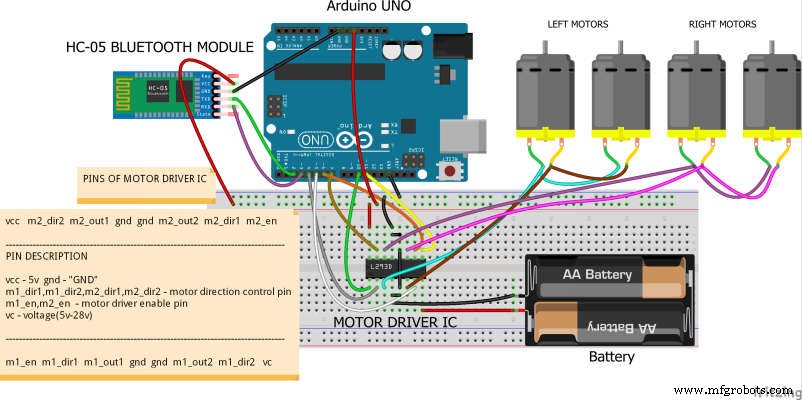
Maak de verbinding zoals weergegeven in de onderstaande afbeelding.
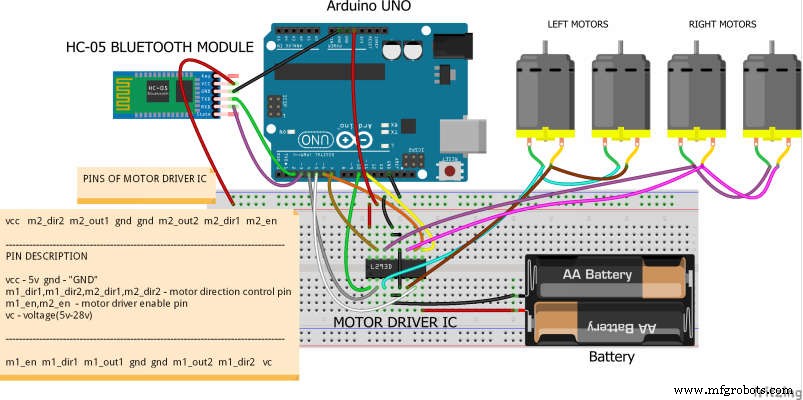
We gaan gebruik maken van de motordrivers omdat Arduino Uno niet voldoende vermogen levert om 4 motoren te laten draaien. We zullen dus de motordriver toevoegen, we zullen in staat zijn om de robot de benodigde energie te geven.
De linker twee motoren zijn parallel geschakeld. Evenzo zijn de twee rechtermotoren te parallel geschakeld. De aansluitingen zijn als volgt gemaakt:
- Pins inschakelen – Digitale pin 10 en 11
- VCC – Arduino 5V
- m1_dir1, m1_dir2, m2_dir1, m2_dir2 – Digitale pin 4, 5, 6 en 7
- VC – Externe batterij
- GND – GND van Arduino en batterijZorg ervoor dat we alle GND-draden met elkaar verbinden.
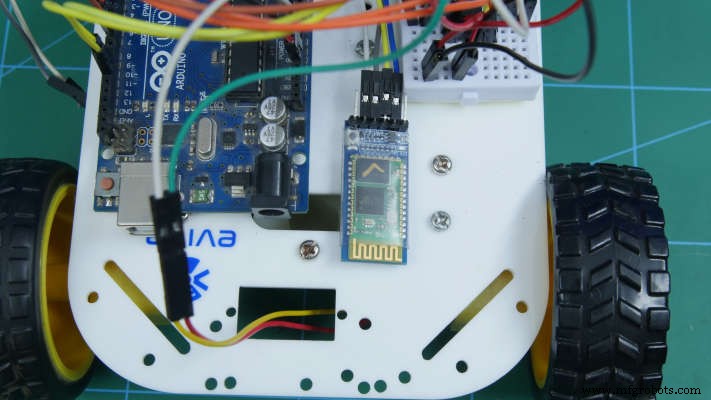
Stap 5:Smartphone aansluiten
We moeten een module toevoegen die de verbinding maakt tussen je robot en de Dabble-app op smartphone.
We nemen Bluetooth HC05-module. Sluit het aan zoals weergegeven in de aansluitafbeelding.
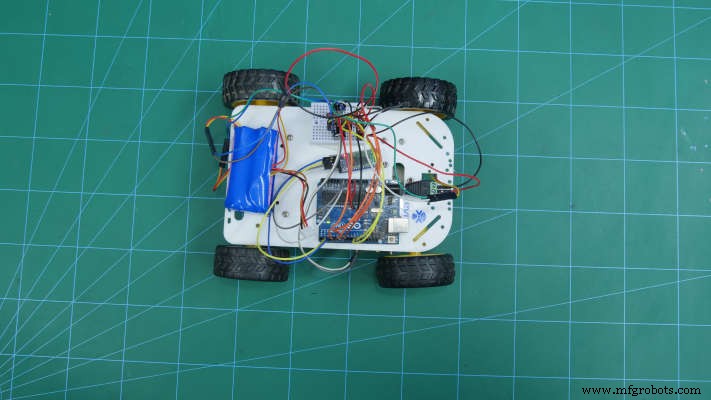
Stap 6:De batterij toevoegen
We zullen een extra stroombron aan onze robot moeten toevoegen. Om Arduino Uno met de batterij te verbinden, gaan we ook DC Terminal Block of DC Jack gebruiken.
Stap 7:Arduino-code
Upload de volgende code:
robot.ino
Stap 8:Werken
We kunnen onze robot eenvoudig met onze smartphone verbinden via Dabble.
Voordat u met een van de modules gaat werken, moet u de Bluetooth waarmee u werkt verbinden.
Er zijn veel modules beschikbaar in de App voor andere functionaliteiten.
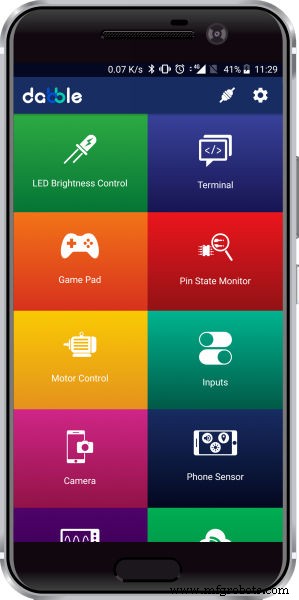
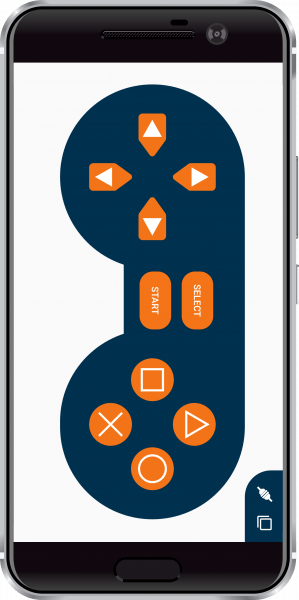
Vandaag werken we met de Gamepad-module.
En we zullen de linker set knoppen gebruiken:
- Omhoog – Vooruit
- Omlaag – Achteruit
- Links – Linksaf
- Rechts – Sla rechtsaf
Stap 9:Conclusie
Hiermee is je DIYDabble-gestuurde 4-wiel robot klaar voor actie!
Psst! Voor de duidelijkheid:Dabble kan veel meer dan alleen het draadloos besturen van robots. Je kunt er hier meer over ontdekken!
Code
- robot.ino
- leef bibliotheek
robot.inoArduino
/* * * dit project demonstreert het besturen van een arduino 4-wiel robot met behulp van de Dabble-app * we zullen de gamepad-module in digitale modus gebruiken * ga voor meer informatie over de gamepad naar https://thestempedia.com/docs/dabble/game- pad-module/ * * in dit project zullen we HC-05 bluetooth-module gebruiken * voor arduino "UNO" gebruik bluetooth-module buadrate lager dan 38400 * * verbinding van bluetooth-module met arduino * * HC-05 bluetooth-module ----> arduino "UNO" * * Tx ----> 2 * Rx ----> 3 * * Geschreven door Punit chotaliya, STEMpedia * op 16 jan 2019 * *///Om de GamePad-module in het Arduino-programma op te nemen, u moet // de volgende koptekst opnemen:#define CUSTOM_SETTINGS#define INCLUDE_GAMEPAD_MODULE//include Dabble app-bibliotheek #include#define motor1_en 10 // motor 1 enable pin #define motor2_en 11 // motor 2 enable pin # definieer motor1_dir1 4 // motor 1 input1 (InputA) #define motor1_dir2 5 // motor 1 input2 (InputA)#define motor2_dir1 6 // motor 2 input1 (InputB)#define mo tor2_dir2 7 // motor 2 input2 (InputB)void setup() { // plaats hier uw setup-code om één keer uit te voeren:Serial.begin (9600); // start seriële communicatie met behulp van 9600 baudrate Dabble.begin (38400); // Voer de baudrate van uw Bluetooth-module in // OPMERKING:voor Arduino "UNO" gebruikt u de Bluetooth-module buadrate lager dan 38400 for (unsigned int i=4;i<8;i++) {pinMode(i,OUTPUT); // declareren invoerpinnen van motor1 en motor2 als uitvoerpin} pinMode (motor1_en,OUTPUT); // verklaren inschakelen pinnen van motor als een output pinMode (motor2_en,OUTPUT); }void loop() { // plaats hier je hoofdcode, om herhaaldelijk uit te voeren:Dabble.processInput(); //Om de gegevens te vernieuwen die de arduino UNO van de mobiele app heeft gekregen, moet je de volgende regel code gebruiken als (GamePad.isUpPressed()) // als UP wordt ingedrukt in de gamepad, beweeg dan de robot vooruit {Serial.print ("OMHOOG"); vooruit(); } else if (GamePad.isDownPressed()) // als DOWN wordt ingedrukt in de gamepad, beweeg de robot dan achteruit { Serial.print("DOWN"); achteruit(); } else if (GamePad.isLeftPressed()) // als LINKS wordt ingedrukt in de gamepad, beweeg dan robot naar LINKS { Serial.print("Left"); links(); } else if (GamePad.isRightPressed()) // als RECHTS wordt ingedrukt in de gamepad, verplaats robot dan naar RECHTS { Serial.print("Right"); Rechtsaf(); } else // stop de robot { Serial.println("strop"); Stoppen(); } } void forward() // functie voor voorwaartse beweging robot {analogeWrite(motor1_en,255); analoogWrite(motor2_nl,255); digitalWrite(motor1_dir1,HIGH); digitalWrite(motor1_dir2,LOW); digitalWrite(motor2_dir1,HIGH); digitalWrite(motor2_dir2,LOW); } void achteruit () // functie voor achterwaartse beweging van de robot {analogeWrite(motor1_en,255); analoogWrite(motor2_nl,255); digitalWrite(motor1_dir1,LOW); digitalWrite(motor1_dir2,HIGH); digitalWrite(motor2_dir1,LOW); digitalWrite(motor2_dir2,HIGH); } void left() // functie voor beweging naar links van de robot {analogeWrite(motor1_en,255); analoogWrite(motor2_nl,255); digitalWrite(motor1_dir1,LOW); digitalWrite(motor1_dir2,HIGH); digitalWrite(motor2_dir1,HIGH); digitalWrite(motor2_dir2,LOW); } void right() // functie voor beweging naar rechts van de robot {analogeWrite(motor1_en,255); analoogWrite(motor2_nl,255); digitalWrite(motor1_dir1,HIGH); digitalWrite(motor1_dir2,LOW); digitalWrite(motor2_dir1,LOW); digitalWrite(motor2_dir2,HIGH); } void Stop() // // functie voor geen beweging { analogWrite(motor1_en,0); analoogWrite(motor2_nl,0); digitalWrite(motor1_dir1,LOW); digitalWrite(motor1_dir2,LOW); digitalWrite(motor2_dir1,LOW); digitalWrite(motor2_dir2,LOW); }
evive BibliotheekC/C++
Geen voorbeeld (alleen downloaden).
Schema's
Productieproces
- Raspberry Pi-robot bestuurd via Bluetooth
- Bouw uw internetgestuurde videostreamingrobot met Arduino en Raspberry Pi
- Wifi-gestuurde robot met Raspberry Pi
- Licht dimmen met PWM met drukknop
- Android bestuurd speelgoed met Raspberry Motor Shield
- Obstakels vermijden robot met servomotor
- Lijnvolger Robot
- Nunchuk-gestuurde robotarm (met Arduino)
- Spraakgestuurde robot
- MobBob:doe-het-zelf Arduino-robot bestuurd door Android-smartphone
- Arduino-gestuurde pianorobot:PiBot