


3D-geprinte prothetische hand met capacitieve aanraakdetectie
Componenten en benodigdheden
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
Apps en online services
 |
|
Over dit project
In dit project ben ik met een idee gekomen dat kan worden geïmplementeerd in bestaande 3D-geprinte prothetische handen. In bestaande elektrisch aangedreven prothesen kon ik het gebruik van capacitive touch sensing-technologie niet vinden voor het activeren van vingers . Dit project combineert twee erg coole dingen, Arduino met capacitive touch sensing voor de bediening en remix van e-NABLE Phoenix-hand ontwerp.
In feite is de Phoenix-hand een door het lichaam aangedreven hand. Wat ik bij dit project heb gedaan, is dat ik het heb omgezet in een elektrisch aangedreven prothese door het vereiste onderdeelontwerp te kiezen.
Het voordeel van capacitive touch sensing is dat u door aanraking de vingers gemakkelijk kunt bedienen. Momenteel kan dit model geen individuele vingers besturen en is er meer ontwikkeling nodig in het draagvermogen en het grijpvermogen.
Verzamel de onderdelen:
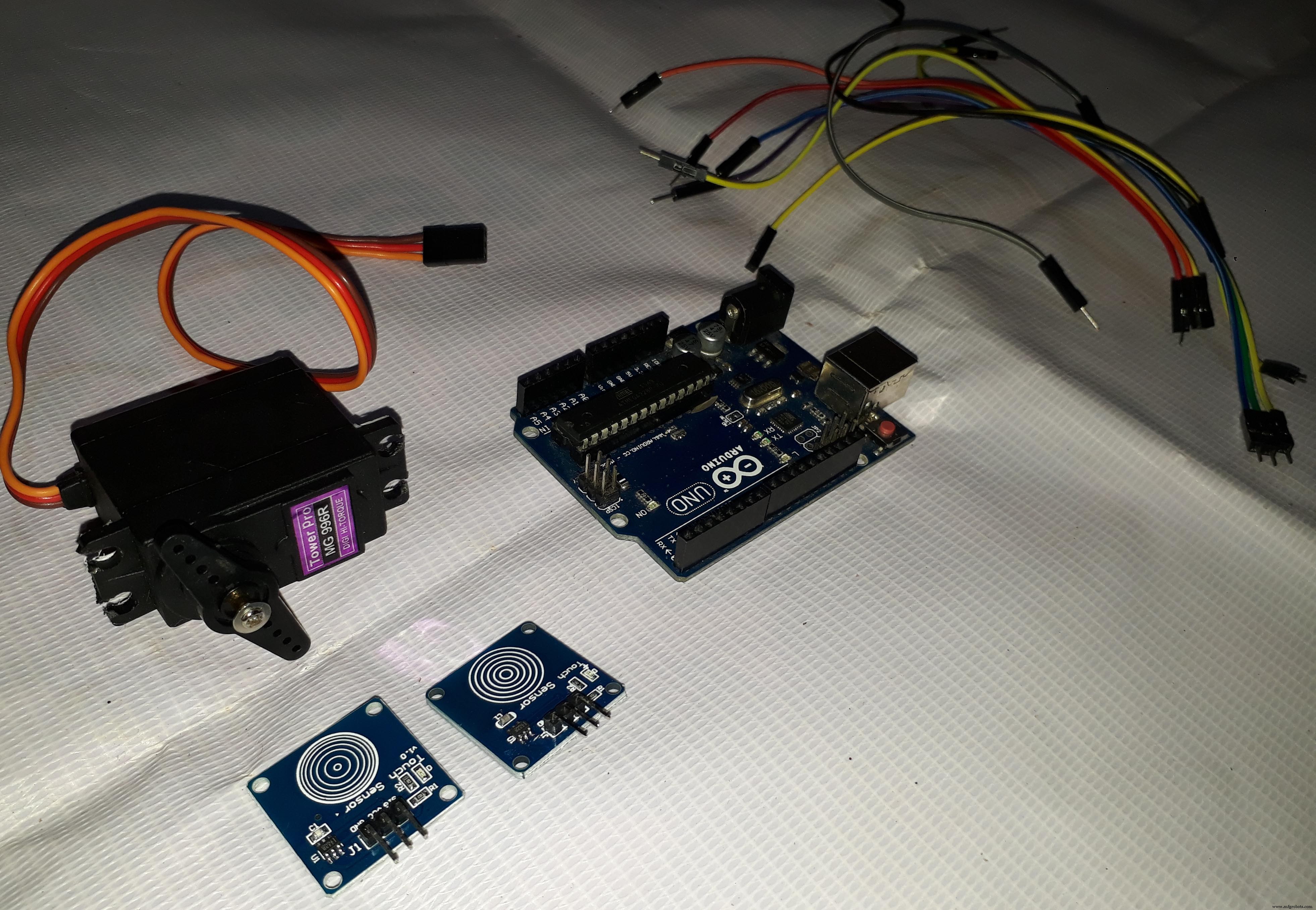
- Arduino Uno
- TTP223 Aanraaksensor -2
- MG996R servomotor
Montage van Phoenix Hand:
De montagedetails van Phoenix hand worden vermeld in de volgende stappen...
Ik heb flexor als vislijn gebruikt en extensor als elastiekjes
Hulpprogramma's:
- 3D-printer
- Lijmpistool
De hand afdrukken:
Dit project maakt gebruik van eerder ontworpen e-NABLE Fenikshand .
Volgens mijn vereisten heb ik alleen de volgende delen afgedrukt
Vingers
- finger_phalanx.stl -4 stuks
- fingertip_long.stl -2 stuks
- fingertip_short.stl -2 stuks
- thumb_phalanx.stl -1 stuk
- thumbtip.stl -1 stuk
Palm
- palm_right_new_supports.stl -1 stuk
Snappins
- fingertip_pin.stl - 4 stuks
- knuckle_pin_long.stl -1 stuk
- knuckle_pin_short.stl -2 stuks
- thumb_knuckle_pin.stl - 1 stuk
- thumbtip_pin.stl - 1 stuk
Aangezien er al gedetailleerde instructies zijn om dit te bouwen, zal ik niet in detail treden
Voor het printen gebruikte ik een Flsun 3D-printer. In totaal duurde het 10-12 uur om af te drukken
(opmerking:deze onderdelen zijn voor een rechterhand)
Montage van de hand:
Het bouwproces van Phoenix hand is al beschikbaar, dus ik zal niet te veel in detail treden. Laat bij twijfel een reactie achter.
Ik heb flexor gebruikt als vislijn en extensor als elastiekje.
** enige gladheid kan nodig zijn voor een soepele pasvorm
Elektronische onderdelen:
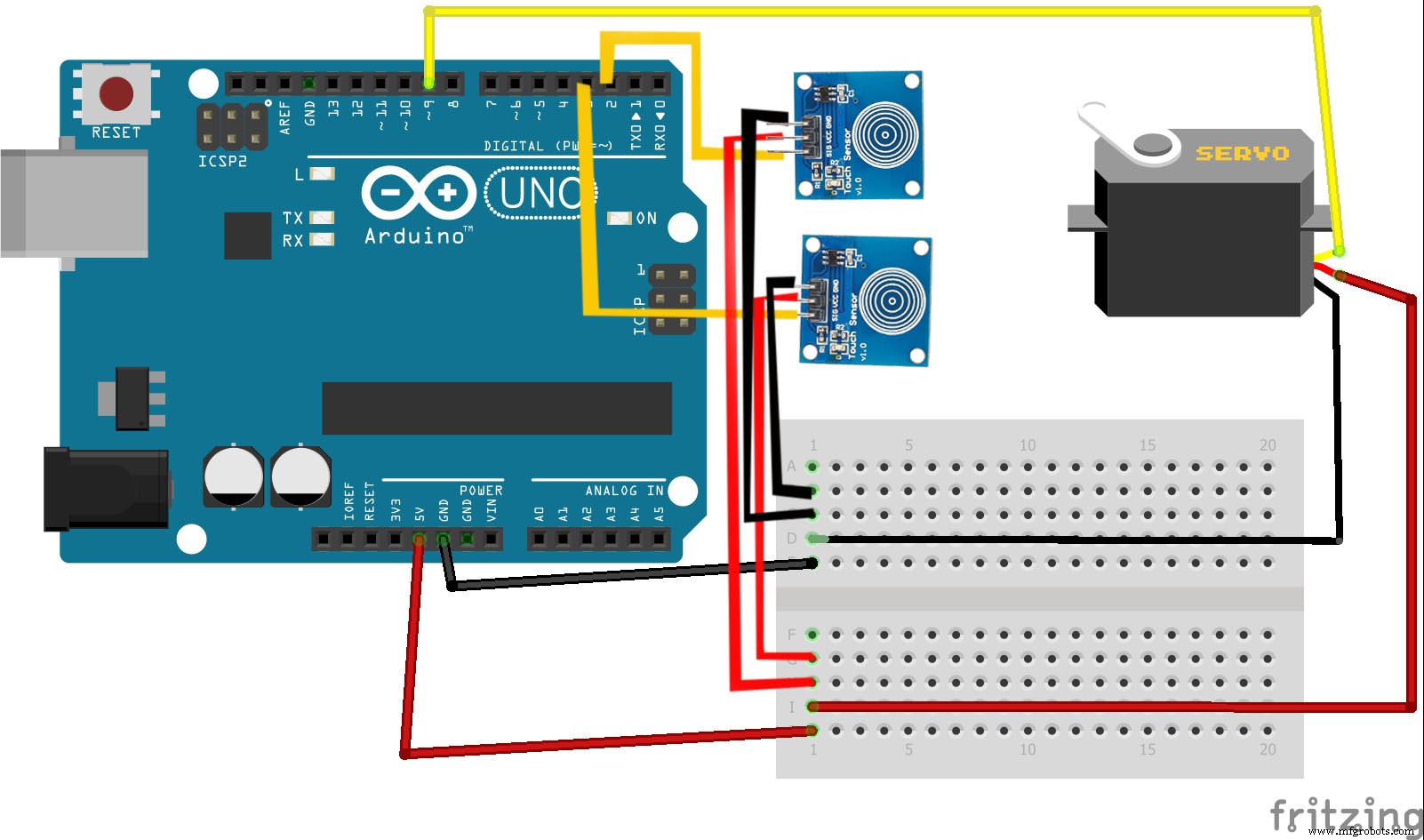
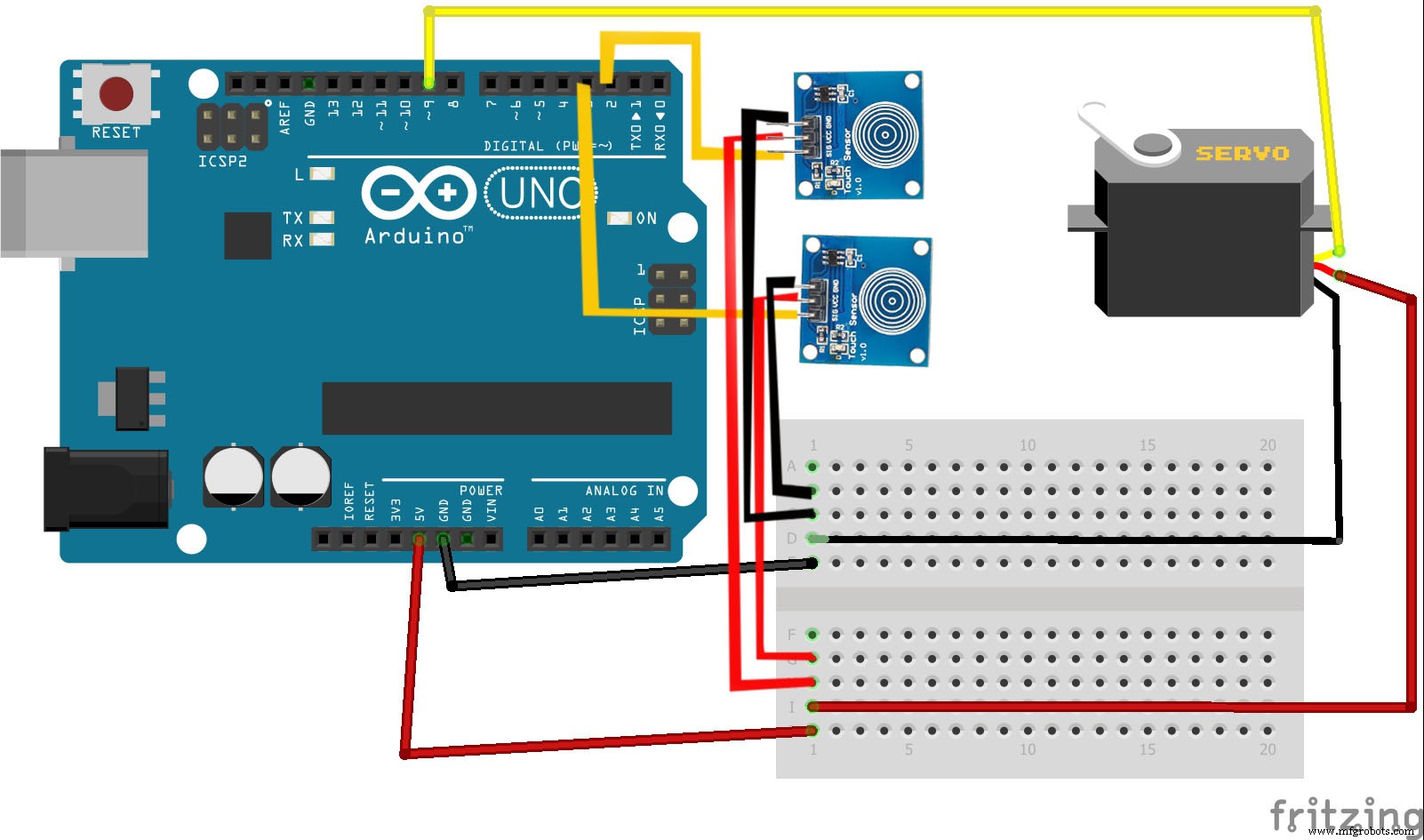
De bediening wordt geregeld via 2 aanraaksensoren (TTP223), de invoer van de aanraaksensor opent en sluit de vingers via de servomotor.
Circuitdiagram en Arduino-code:
Gelukkig maken!
Heel erg bedankt voor het lezen als je meer informatie nodig hebt, voel je vrij om te vragen in opmerkingen, en ik zal mijn best doen om je te beantwoorden.
Code:
#include Servo myservo; #define CTS1Pin 2 // Pin voor capacitieve aanraaksensor 1#define CTS2Pin 3 // Pin voor capacitieve aanraaksensor 2int pos;void setup() { myservo.attach (9); // hecht de servo op pin 9 aan het servo-object} ongeldige lus () {int CTSValue1 =digitalRead (CTS1Pin); int CTSValue2 =digitalRead (CTS2Pin);if (CTSValue1 ==HOOG) {for (pos =0; pos <=180; pos +=1) myservo.write(pos); vertraging (15); } if(CTSValue2==HIGH) { for (pos =180; pos>=0; pos -=1) myservo.write(pos); vertraging (15); }} Code
- Arduino-schets
Arduino SchetsArduino
#includeServo mijnservo; #define CTS1Pin 2 // Pin voor capacitieve aanraaksensor 1#define CTS2Pin 3 // Pin voor capacitieve aanraaksensor 2int pos;void setup() { myservo.attach (9); // hecht de servo op pin 9 aan het servo-object} ongeldige lus () {int CTSValue1 =digitalRead (CTS1Pin); int CTSValue2 =digitalRead (CTS2Pin);if (CTSValue1 ==HOOG) {for (pos =0; pos <=180; pos +=1) myservo.write(pos); vertraging (15); } if(CTSValue2==HIGH) { for (pos =180; pos>=0; pos -=1) myservo.write(pos); vertraging (15); } }
Schema's
Productieproces
- Printplaat
- 3D-geprinte onderdelen afwerken met… kleurpotloden?
- Inleiding tot capacitieve versnellingsmeters:versnelling meten met capacitieve detectie
- 3D-geprinte protheses zijn de toekomst
- Divide By Zero presenteert zelfgemaakte 3D-geprinte kaarten met Google Maps
- Betere kwaliteitscontrole met 3D-geprinte onderdelen
- Blijf jezelf vast met functionele 3D-geprinte onderdelen!
- De Go Kart opnieuw vormgeven met 3D-geprinte onderdelen
- Toeleveringsketentransformatie met een menselijke touch
- Standaard draaibank met touchscreenbediening
- Universele tactiele detectie met elektromechanisch gekoppelde geleiders