


Sneeuwploegrobot
Componenten en benodigdheden
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 3 | ||||
| × | 4 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 6 |
Over dit project
Waarom ik een sneeuwploegrobot wilde maken? Omdat ik niet ongevoelig ben voor oplossingen om het leven gemakkelijker te maken, heb ik het idee overwogen om een oplossing te creëren en voor te stellen die mensen kan helpen de koude wintertemperatuur en de vermoeidheid van het gebruik van de traditionele handmatige schop te vermijden verwijder de sneeuw van de loopbrug. Hiervoor heb ik gekozen voor iets leuks en technologisch. Zo besloot ik een Sneeuwploeg Robot te gaan ontwikkelen, op afstand bestuurbaar, met sterke mechanica, besturingselektronica en krachtige elektromotoren. Het resultaat is een miniatuurversie van een echte sneeuwploeg met rupsen, gemotoriseerd blad (dat kan worden opgetild en verplaatst) en een lichtprojector die bovenop is gemonteerd om de weg in het donker te verlichten. De robot kan op afstand worden bestuurd met de PlayStation-afstandsbediening.
In de volgende video kun je de sneeuwploegrobot in actie zien, iemand vertelde me dat het lijkt alsof de sneeuwploegrobot de aanloop moet nemen om te scheppen, HET IS NIET ZO , Ik heb de video gemaakt om te laten zien hoe de sneeuw wordt verwijderd.
Hoe wordt het gemaakt?
De robot bestaat uit een frame dat een gemotoriseerd blad ondersteunt (dat kan worden opgetild en verplaatst) en het tractiesysteem dat bestaat uit elektromotoren, wielen en rupsbanden. Het chassis is gerealiseerd met aan elkaar gelaste ijzeren staven met een rechthoekige doorsnede. De afmeting van de robot is 600X375X240 mm, exclusief het blad, en het gewicht is ongeveer 30 kg.
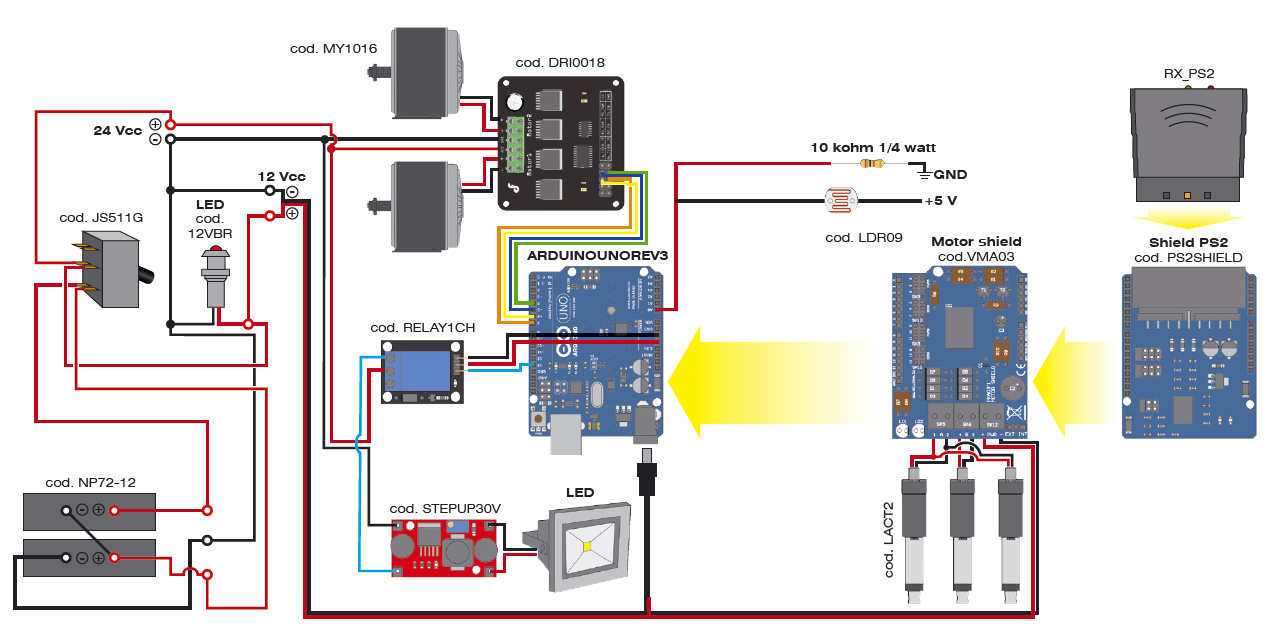

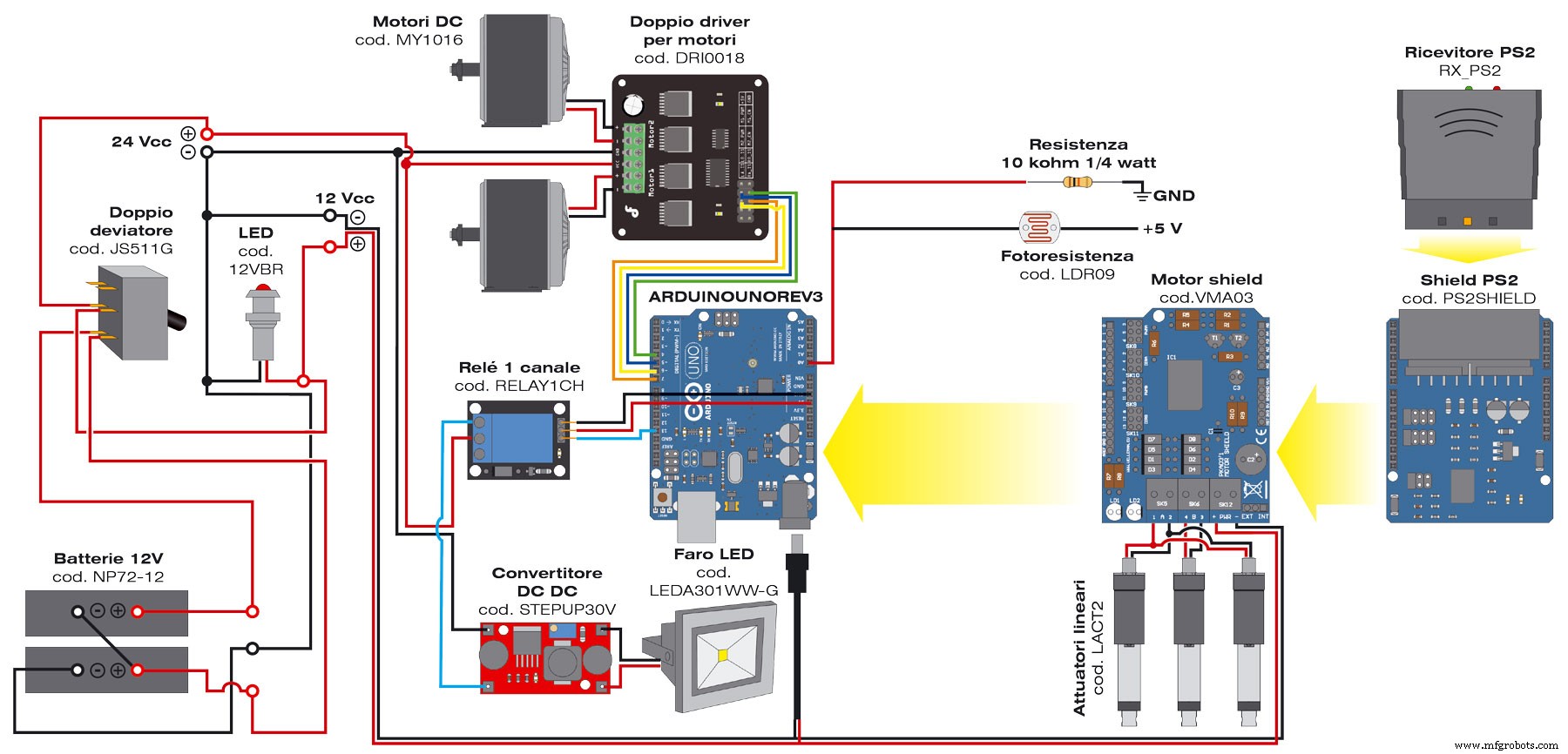
Het elektrische en elektronische deel van de sneeuwploeg is gebaseerd op Arduino Uno, heeft drie schilden en is gekoppeld aan:
- MOTOR BESTUURDER
- RELAISKAARTKANAAL
- DC/DC-converter opvoeren
Het schild dat op Arduino is gemonteerd, is het motorschild om de drie lineaire motoren te besturen die de beweging van het blad en de PS2SHIELD regelen, waarmee je kunt communiceren met de PlayStation 2 (PS2); de laatste vereist de RX-PS2, een 2,4 GHz-radio-ontvanger voor het verzenden/ontvangen van specifieke opdrachten van de bovengenoemde console. Het bedradingsschema van de robot vindt u op deze pagina's; de stroombron wordt gemaakt door een reeks van twee loodgelbatterijen van 7,2 Ah:we nemen de 12 V van de middelste verbinding van de twee, terwijl we tussen de negatieve en de positieve van de serie 24 volt nemen. Een schakelaar (125V, 2×15 ampère) regelt de twee voedingslijnen. Met 12 volt gebruiken we Arduino, die de schilden van stroom voorziet via de pin-strip; een LED (intern montage van de beperkende weerstand) geeft aan wanneer Arduino actief is.
De 12 volt rechtstreeks van de accustapel voedt ook het vermogensgedeelte van het motorscherm. Omdat de absorptie van de drie lineaire actuatoren (cod. LACT2) hoog is, is het namelijk niet aan te raden om de 12 V van Arduino te nemen:je kiest ervoor om de externe voeding naar de juiste PWR-terminal te sturen. Om de externe voeding te gebruiken, moet u de jumper (op het schild) in de buurt van de terminal, tussen de centrale en de EXT, verplaatsen. Het beheer van het schild vereist een speciale bibliotheek voor Arduino, die bij het onderdeel wordt geleverd. Elke lineaire actuator bestaat uit een 12 Vdc-reductiemotor die een wormschroef gebruikt om een as heen en weer te bewegen over de lengte (maximale uitslag van 5 cm).
De actuator heeft een dynamische belasting van 50 kg en een maximale snelheid van 1,3 cm/s. Het kan tot ongeveer 250 kg dragen, wanneer het niet beweegt, en het koppel zorgt ervoor dat de positie van de as behouden blijft, zelfs als er geen stroom is. Twee eindschakelaars zorgen ervoor dat de motor stopt wanneer deze de maximale uitzetting en samentrekking bereikt, terwijl de diodes de omgekeerde richting mogelijk maken na het bereiken van het limietpunt. De actuator is gemaakt van metaal en is afgedicht om hem te beschermen tegen stof en water (IP63-classificatie).
Laten we ons nu wenden tot de 24 volt voedingslijn, die het stroomgedeelte van de sneeuwploeg voedt, dat zijn de tractie en de projector (optionele) secties:de eerste is gebaseerd op de motoraandrijving, die met vier draden moet worden aangesloten op de hetzelfde aantal Arduino digitale lijnen. De motordriver is een powerdriver met dubbele brug die twee borstelmotoren continu kan aandrijven met een spanning van max. 35 VDC en een stroomsterkte van 15 A (elk).
Door te interfacen met Arduino en slechts vier digitale I/O (2 PWM) te gebruiken, kun je de draairichting en snelheid van de motoren kiezen. Het circuit heeft vier controlepinnen, vier LED's die de draairichting van de motoren aangeven, twee pinnen voor de voeding van de kaart (5 Vdc) en twee aluminium koellichamen aan de achterkant van de printplaat, die nodig zijn om de tijdens het bedrijf gegenereerde warmte af te voeren op volle kracht.
Voor het beheer van de driver door Arduino stelt de fabrikant een speciale bibliotheek ter beschikking. Met de uitgangsklemmenblokken kunt u de twee motoren aansluiten, die moeten worden aangesloten zoals aangegeven in het diagram (de polariteit niet omdraaien, anders lopen de sporen omgekeerd!) met kabels met een doorsnede van minimaal 1,5 mm². Over besturingsingangen moet de verbinding tussen Arduino en de controller-connector pitch 2.54 worden gerespecteerd; correspondentie die nodig is bij het gebruik van de bibliotheek van de fabrikant en onze firmware:als je ze bewerkt, moet je de verbindingen herzien.
Onthoud dat DIR de logische niveaus zijn om de draairichting van de motoren in te stellen en PWM zijn de PWM-signalen om de vermogensstuurprogramma's te besturen. Om de connectorcontacten van de controller te identificeren, volstaat het om te verwijzen naar de zeefdruk die ernaast zichtbaar is op de componentzijde van de printplaat. Naast de motorcontroller, zal de 24 volt het gedeelte van de LED-projector van stroom voorzien, die u kunt monteren of niet; indien gemonteerd, gerespecteerde bedrading aangegeven en vergeet niet om de positieve 24 V van de relaiskaart te nemen (code RELAY1CH). De laatste herbergt een relais en de respectieve aandrijftransistor die wordt bestuurd door Arduino via de Digital I/O 13; Arduino voedt ook de kaart, door middel van de +5V en aarde (GND).
Een relais maakt het in- en uitschakelen van de projector mogelijk, gericht op actie op het bijbehorende circuit. De projector is ontworpen om te werken op 220 Vac, maar aangezien deze spanning niet beschikbaar is op de robot, hebben we de projector aangepast om het gebruik van een omvormer te vermijden door hem te openen, de AC / DC te verwijderen en de twee draden van de voedings-LED rechtstreeks naar de uitgang van de converter DC / DC (code STEPUP30V); de laatste is een schakelconverter met instelbare uitgangsspanning, die moet worden afgestemd om de LED een stroom te geven zodat deze op ongeveer 10 watt werkt. Meestal wordt dit bereikt bij ongeveer 30 volt. Onthoud echter dat het vermogen wordt gegeven door het product VxI, (stroom door spanning, in watt wordt verkregen als V in volt is en I in ampère), en bij 30 V zou het stroomverbruik iets minder dan 340 mA moeten zijn. Hoewel de groep LED's intern is beveiligd tegen overstroom, heeft de STEPUP30V een beperking van de uitgangsstroom tot 2A, dus het kan handig zijn om deze te vervangen door een DC / DC die is uitgerust met een uitgangsstroombegrenzing.
Het ontvangen van gegevens van de afstandsbediening wordt gedaan door het schild PS2SHIELD, waarvoor de fabrikant de specifieke bibliotheek beschikbaar stelt. Het schild voert het ontvangen en decoderen van het commando uit; het radiogedeelte wordt overgelaten aan de RX _PS2, die in de bijbehorende connector wordt gestoken. Het laatste dat moet worden opgemerkt, is de fotoweerstand, die door Arduino wordt gebruikt om de omgevingsverlichting te detecteren en om het bord RELAY1CH te besturen, zodat de LED-projector wordt ingeschakeld; de component wordt door een weerstand van 10 kOhm (1/4 W) naar de spanningsdeler gevoerd en wordt uitgelezen vanaf de analoge ingang A0 Arduino. De 5 volt is afkomstig van Arduino 5V. Deze lichtsensor doet een simpel ding:bij goede lichtomstandigheden is de weerstand van de fotoweerstand laag en is de spanning die door de ADC van de Arduino-microcontroller wordt gelezen laag en wordt de relaiskaart niet geactiveerd; duisternis, in plaats daarvan verhoogt de weerstand aanzienlijk en de ADC leest een spanning van bijna 5 volt, waardoor de projector wordt ingeschakeld.
BOUWINSTRUCTIES
BEKNOPTE GIDS
Code
- Schets
SchetsArduino
https://cdn.hackaday.io/files/869403719640960/Vittorio_Snowplow_Robot.zip
Schema's
Productieproces