


Robotarmproject:een stapsgewijze handleiding
Worstel je met taken die een hoge mate van nauwkeurigheid vereisen? Of heeft u te maken met consistente en repetitieve bewerkingen die hoge precisie en prestaties vereisen? Dan heb je een robotarmproject nodig.
Het is ook een betrouwbaar elektronisch PCB-apparaat dat een breed scala aan bewerkingen kan uitvoeren. U vindt de robotarm dus in verschillende industrieën, zoals:
- Toegang tot de machine
- Laboratoria
- Industriële automatisering
- Productie
Daarom zal het een briljant idee zijn om het robotarmproject op te pakken. Ongetwijfeld ziet het er in eerste instantie ingewikkeld uit, maar met alle materialen op zijn plaats, zal de taak eenvoudiger zijn. In dit artikel geven we je details over het bouwen van een robotarm.
Laten we aan de slag gaan!
Wat is een robotarm?

Industriële robotarm
Een robotarm verwijst naar een mechanisch hulpmiddel dat u kunt automatiseren door middel van speciale software. En je kunt de speciale software op een bepaalde microcontroller installeren. Meestal kan dit apparaat een onderdeel zijn van een mensachtige robot of een onafhankelijk apparaat.
Bovendien hangt het soort taak dat het uitvoert af van de beweging van het armgewricht. Je ziet bijvoorbeeld een robotarm en een robotarm met afzonderlijke gewrichten die in een rechte richting kunnen bewegen.
Hoe maak je een eenvoudige robotarm?
We laten je zien hoe je een eenvoudige robotarm maakt die de volgorde van bewegingen en spel onthoudt. Dat gezegd hebbende, laten we eens kijken naar de componenten die je nodig hebt voor het project:
- Broodplank
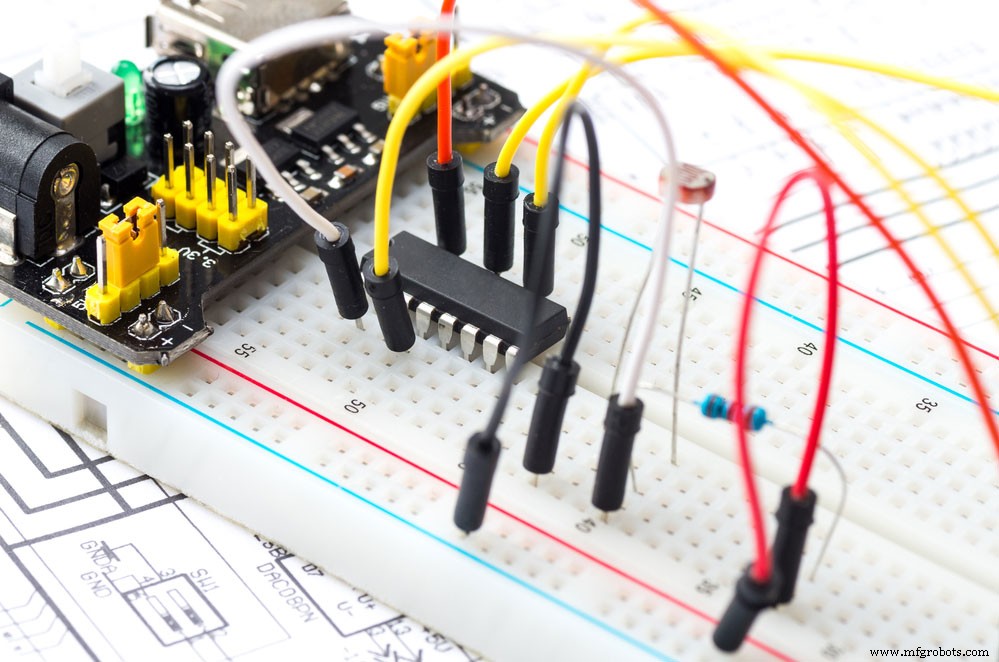
Een breadboard
- Stukjes hout
- Geïnstalleerde Arduino IDE
- Servomotoren (5)
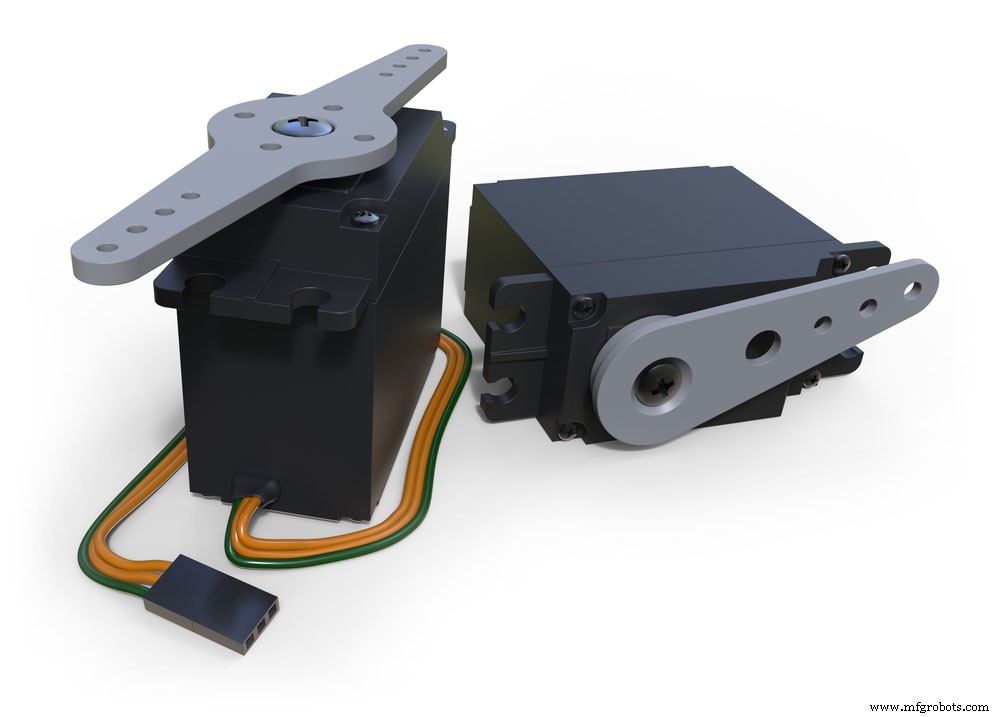
Set servomotoren
- Arduino UNO
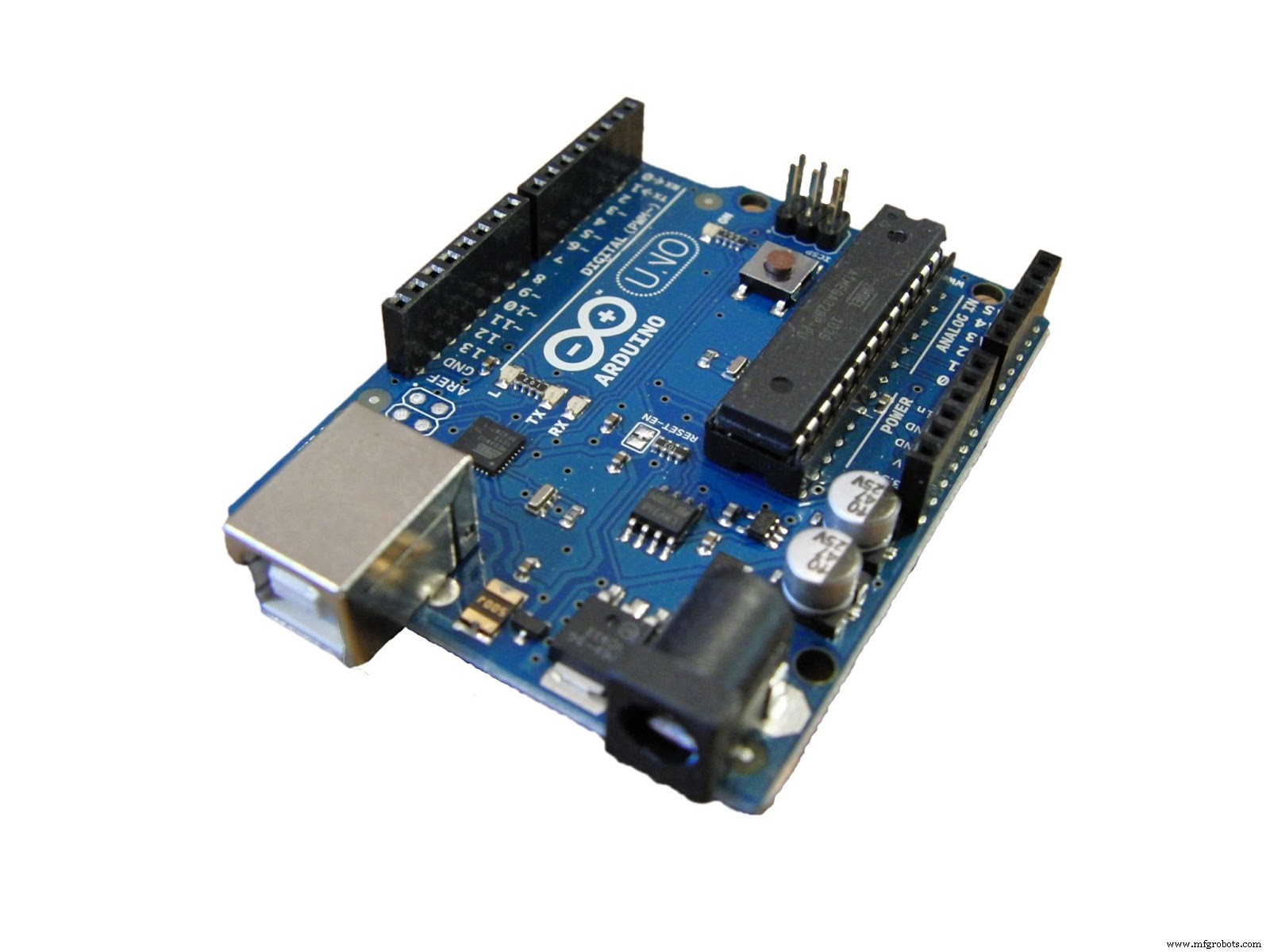
Arduino UNO
Bron:Wikimedia Commons
- Potentiometers (5)
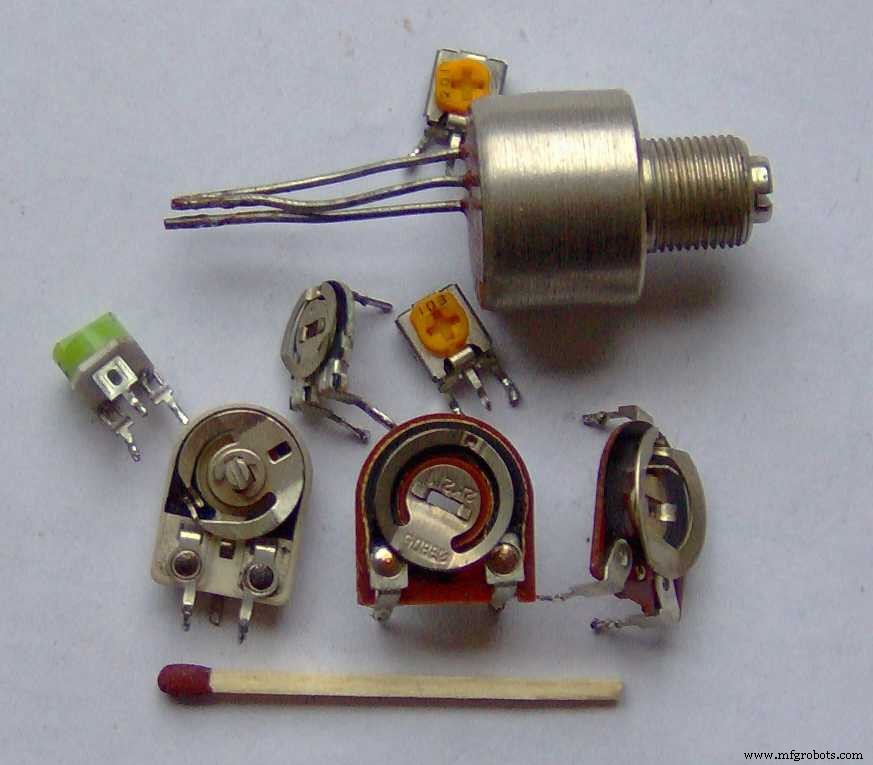
Set potentiometers
Bron:Wikimedia Commons
- Adapter (5V 2A)
- Canvasbord (A4-formaat)
- Signaaldraden

Signaaldraden
Met dit in gedachten kunt u in de volgende stappen doorgaan met het bouwen van uw eenvoudige robotarmproject:
Robotarm aan het werk
Stap 1- Begin met het samenstellen van de stukjes
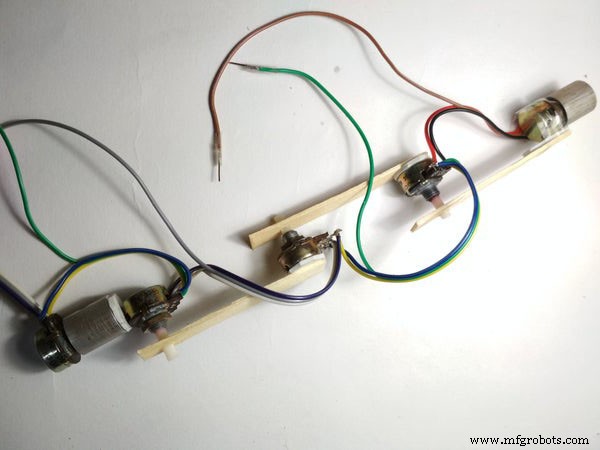
IJslolly stukjes hout aangesloten op potentiometer
Bron:Instructable
De eerste stap is om een klein en stabiel stuk hout te krijgen om de arm te maken. Terwijl u toch bezig bent, kiest u voor elk mechanisch ontwerp dat u verkiest. Plak vervolgens de servo's op je hout met een tape (dubbelzijdig). Bevestig daarna de servo's met schroeven aan het hout.
Wat de hoofdarm betreft, deze kunt u maken door uw potentiometers op het kleine stuk hout te bevestigen. Je kunt je canvasbord als basis gebruiken om je opstelling op te hangen.
Stap 2 – Sluit uw draden aan
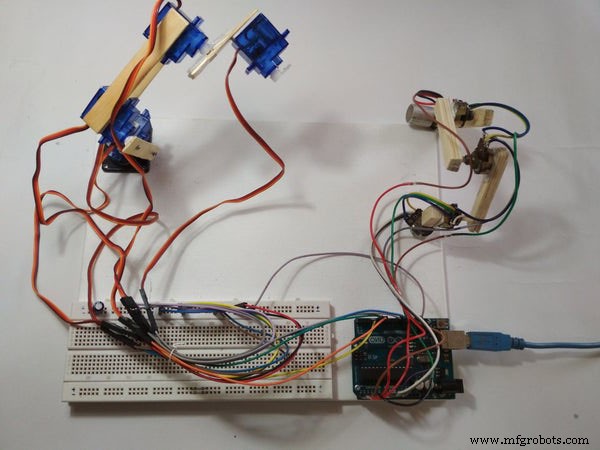
De draden en stukken hout op het breadboard aansluiten
Bron:Instructable
Het doel hier is om ervoor te zorgen dat u al uw draden goed aansluit. En de eerste stap is om al je servo's te krijgen. Maak vervolgens een parallelle verbinding van de servo's met de stroombron. Dat wil zeggen, uw zwarte draad moet naar Gnd gaan terwijl de rode draad wordt aangesloten op de positieve.
Zodra je dat hebt, pak je je signaaldraden (oranje of geel) en bevestig je deze aan de PWM-pin van de Arduino. Hiermee kunt u doorgaan met het parallel aansluiten van de Gnd van Arduino. U moet ook uw potentiometers aansluiten op +5V.
Bevestig daarna uw middelste terminal aan de Arduino Analoge pin. Dat gezegd hebbende, je kunt de servo's regelen met digitale pinnen zoals 10, 9, 6, 5 en 3. Bovendien kun je de A0 tot A4 (analoge pinnen) gebruiken voor invoer van potentiometers.
Verder helpt de potentiometer die op de A0 wordt aangesloten bij het regelen van de servo die op pin 3 wordt bevestigd. Ook bestuurt pot op A1 de servo die op pin 5 wordt bevestigd.
Ongetwijfeld voedt de Arduino de servo's niet. Maar het is van vitaal belang om ervoor te zorgen dat u de Arduino en GND goed aansluit, om de arm te laten werken.
Stap 3 – Tijd om te coderen
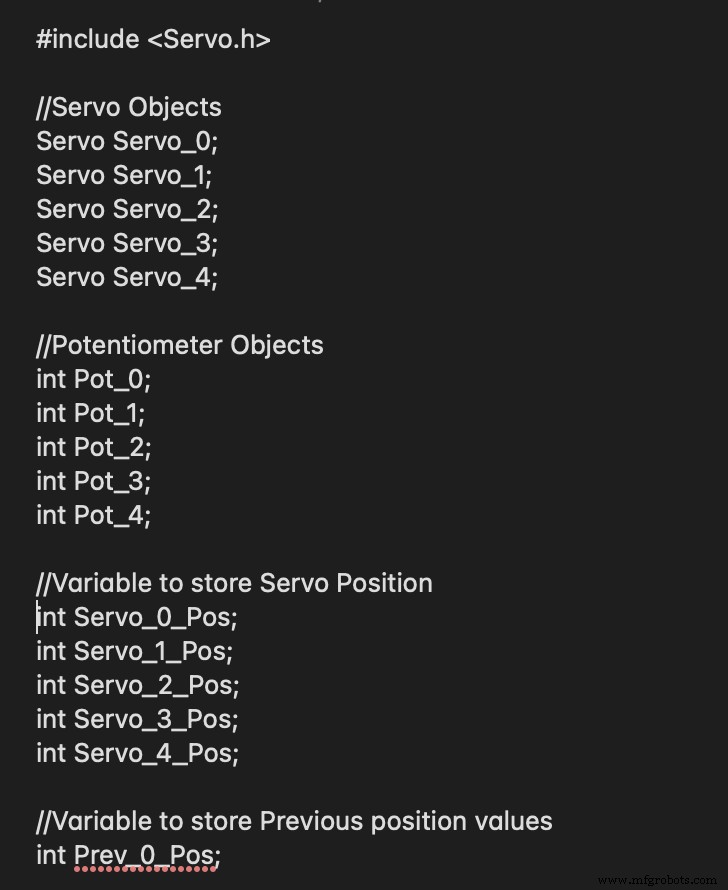
Het proces van coderen voor dit project is vrij eenvoudig. U kunt dus beginnen met het opslaan van de potentiometers in een array. Wanneer u de records hebt, gaat u verder met het transverseren met een for-lus. Op die manier zullen de servo's de stappen afhandelen.
Met andere woorden, u kunt het proces starten door alle belangrijke variabelen globaal te vermelden. Hierdoor is het gemakkelijker om de variabelen in het hele programma te begrijpen en te gebruiken.
Ga daarna verder met de hoofdfunctie die de eerste uitvoering initieert. Je komt dus met een instellingsfunctie die de ingestelde pinnen en hun functies benadrukt.
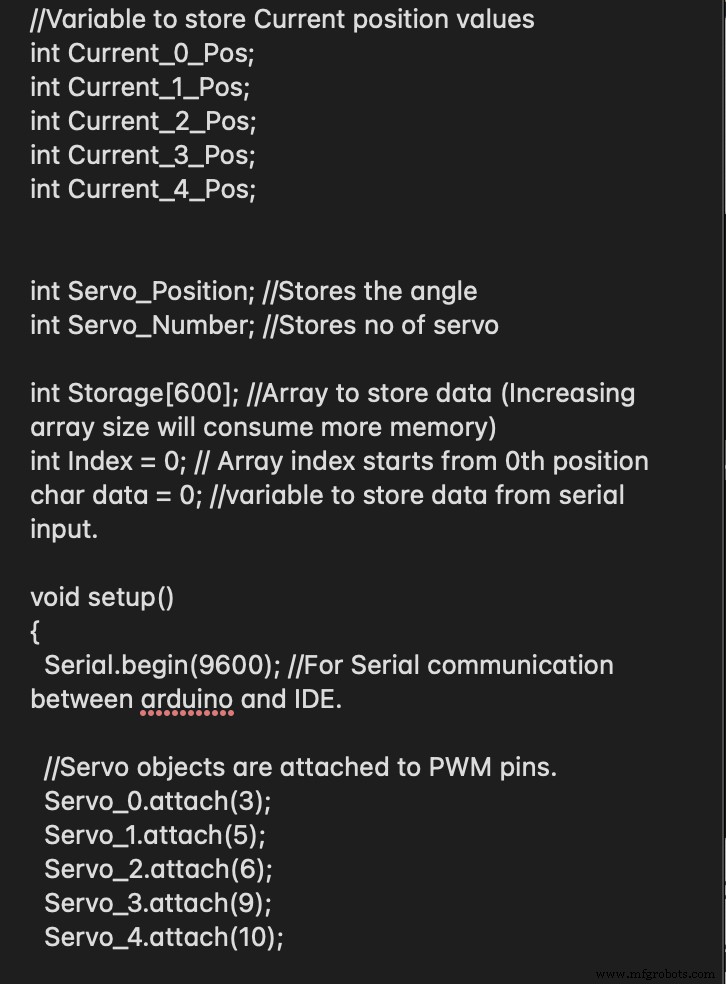
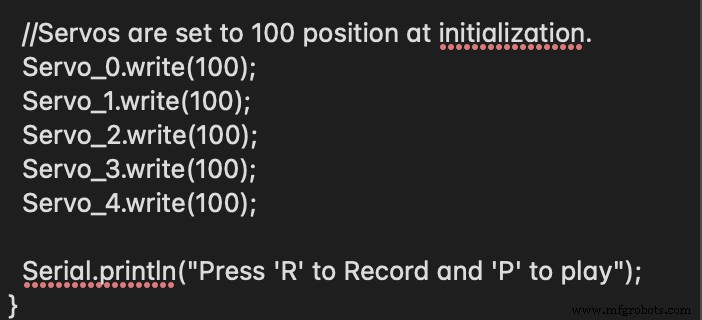
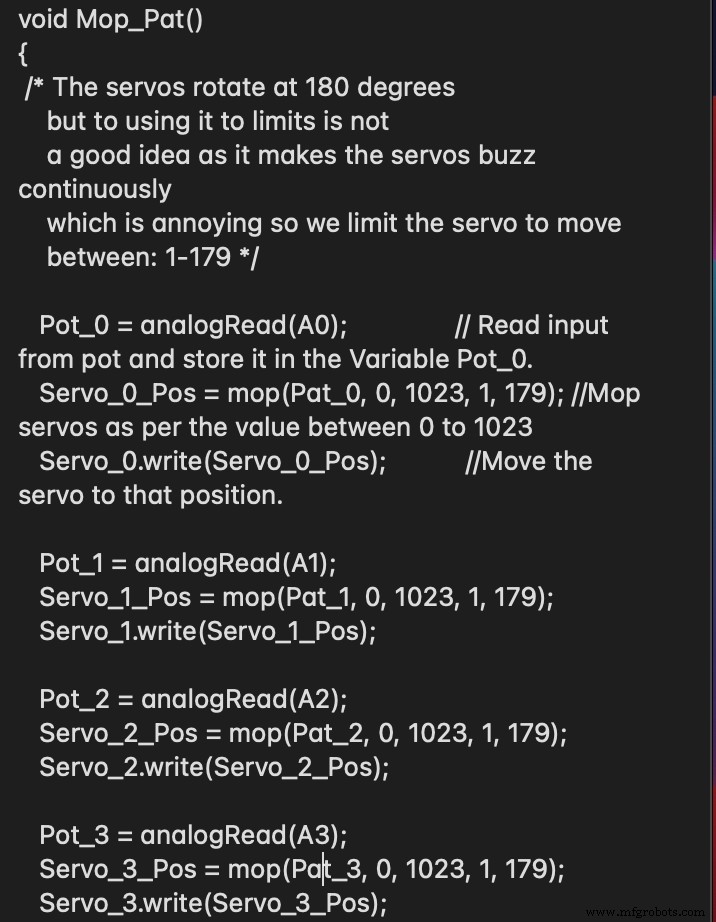
Als je dat hebt, is de volgende taak om de analoge ingangspinnen te gebruiken om de waarden van de potentiometer te krijgen. Ook helpen de analoge ingangspinnen om de waarden in kaart te brengen, wat helpt bij het regelen van servo's.
Nu is het tijd om de door de gebruiker gedefinieerde functie een naam te geven. In de onderstaande code hebben we Mop_Pat; gekozen.
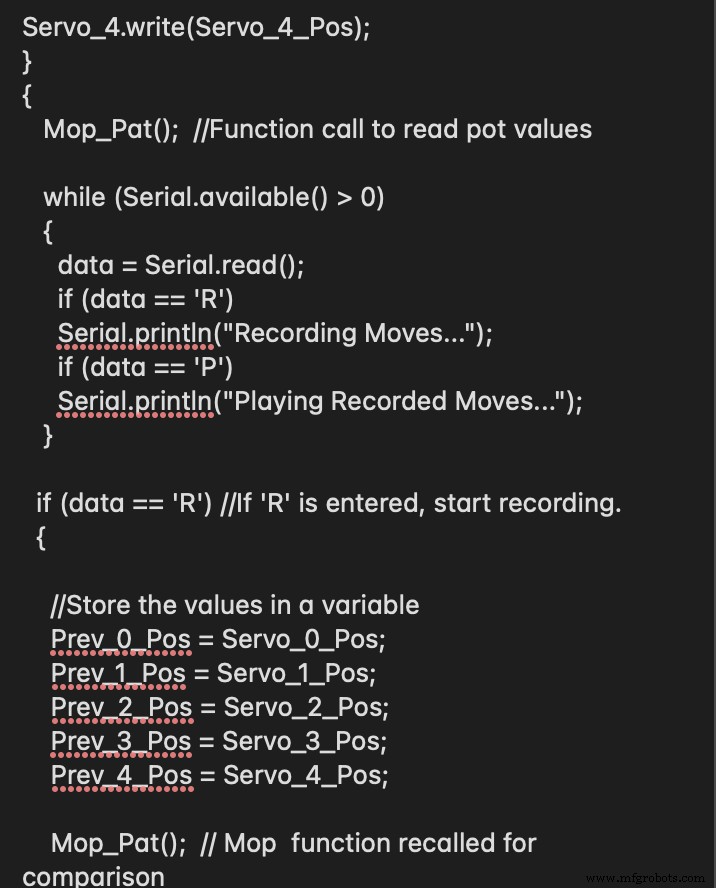
Hiermee kun je de loop-functie neerleggen. Als je klaar bent met de code, kun je deze overzetten naar het Arduino-bord.
Als dit op zijn plaats is, zal uw robotarm werken. Bovendien kun je waar nodig een paar tweaks met de code doen voor een soepelere werking.
Stap 4 – Test weg
Wanneer u klaar bent met het overbrengen van de code naar het bord, gaat u naar de optie Tools. Ga in deze optie naar "Seriële monitor". Wanneer u op deze functie klikt, kunt u de Arduino resetten. En u kunt de masterarm gebruiken om de robotarm eenvoudig te bedienen. Op dit moment kunt u echter geen beweging opnemen.
U moet dus "R" op de monitor typen om alle bewegingen vast te leggen. Als je al je zetten hebt vastgelegd, typ je 'P'. Deze functie helpt om alle zetten opnieuw te spelen. En het beste is dat de servo's de bewegingen blijven uitvoeren, zolang je het bord niet reset.
Andere ideeën voor Arduino-robotarmprojecten
Als je denkt dat het bovenstaande project te eenvoudig is, probeer dan gerust andere Arduino-armrobotica-projectideeën uit, zoals:
De robotarm met gebarenbediening (Arduino + Kinect)
Handgebaargestuurde robotarm
Bron:Wikimedia Commons
Dit project omvat het besturen van een robotarm met gebaren. En je kunt de gebaren vastleggen met een Kinect-sensor. Daarom ontwikkelden ingenieurs de robotarm om de elleboog-, rechterarm-, hand- en elleboogbeweging te imiteren. Bovendien hebben ze deze tool ook gemaakt met servomotoren.
Een webgestuurde robotarm

Webgestuurde robotarm
De webgestuurde robotarm is een andere opmerkelijke uitvinding. De tool laat je de mogelijkheid zien om de armrobot te coördineren met een webserver. Interessant is dat een externe bron dit apparaat van stroom voorziet, en het gebruikt ongeveer zes servomotoren.
Dus om dit voor elkaar te krijgen, moet je de workflow bestuderen, kennis nemen van de broncode en de systeemarchitectuur begrijpen.
Nunchuck-gestuurde Arduino-robotarm
Dit projectidee valt op door zijn uniekheid. Met dit project leer je hoe je een Arduino Mega gebruikt om het apparaat te programmeren en een armrobot effectief te monteren. Je kunt ook de Nintendo Nunchuk gebruiken om deze tool te besturen.
En het beste is dat de Nunchuk veel sensoren heeft. Bovendien is het gemakkelijk verkrijgbaar en goedkoop. Dus als je deze robotarm wilt bouwen, is het cruciaal om een lijst te krijgen van de tools die je nodig hebt en de code.
Android App-gestuurde Arduino Robotarm

Robotarm in productielijn
Deze robotarm is een ander taakproject dat je kunt kiezen. Het apparaat gebruikt een Bluetooth-module naast de Arduino via een Android-app. Dat gezegd hebbende, sommige van de tools die je nodig hebt om deze robotarm te bouwen, zijn een generieke motor met een Bluetooth-module (HC-05) en een Arduino mega 2560.
De draadloos bestuurde robothand
Het kiezen van dit project is ideaal als je wilt weten wat er nodig is om een robothand te bouwen. Bovendien leert het je ook hoe je deze tool kunt besturen. Verder heb je gereedschap nodig zoals de bijbehorende sensor, batterijen, Arduino-bord en servomotor om deze robothand te bouwen met een draadloze handschoen.
De Arduino Bartender Robotarm

Arduino barman robotarm
Bron:WorldArchitecture
De Bartender-robotarm is het project om op te springen als je op zoek bent naar een leuk project dat indruk zal maken op gasten. Deze tool heeft meestal een RobotGeek Snapper Arm. Bovendien heeft het een klepinjector, die zijn bartendingfunctie versterkt. Dit project zal dus goed werken om drankjes vanuit een container naar je glas te verplaatsen.
Computermuis bestuurde Arduino robotarm
Dit project is ideaal als je van een Arduino-armproject houdt dat je kunt besturen met je computermuis. Het beste is dat deze Arduino-robotarm zijn beslissing kan nemen door foto's te verwerken. Hoe? De tool doet het met behulp van Matlab vision-software.
Laatste woorden
Het robotarmproject is hard op weg een ding in de wereld te worden. En het is bevredigend om te zien dat deze apparaten items vervoeren, dingen balanceren en stapelen met precisie - op basis van het type. En ze zijn nuttig voor medische toepassingen en verkenning van de ruimte.

Robotarm in fabriek
Het is dus een uitstekend moment om de goedkope versie van deze tool te bouwen, vooral als u geen terugkerende taak wilt uitvoeren. Heb je hulp nodig om aan de slag te gaan? Neem gerust contact met ons op.
Industriële technologie
- Makerarm:een mega-coole robotarm voor makers
- De stapsgewijze handleiding van de productieleider om websiteverkeer te stimuleren
- Robotische arm:hoe wordt het gemaakt?
- Wat is een robotmanipulator? Een gids
- De ultieme gids voor gerobotiseerde palletiseermachines
- Hydraulische robotarm in de maakindustrie:een definitieve gids
- Arduino 3D-geprinte robotarm
- Nunchuk-gestuurde robotarm (met Arduino)
- Robotische armmarkt groeit tot US$ 14,78 miljard in 2026
- RTC-module:de absolute gids voor een eenvoudig project
- De industriële robotarm - een productieboom