


Wat is Cycloïdale Driver? Ontwerpen, 3D-printen en testen
In deze zelfstudie leren we wat een cycloïdale aandrijving is, hoe het werkt, leggen we uit hoe we ons eigen model kunnen ontwerpen en kunnen we er een 3D-afdrukken zodat we het in het echt kunnen zien en beter begrijpen hoe het werkt.
Je kunt de volgende video bekijken of de schriftelijke tutorial hieronder lezen.
Wat is Cycloidal Drive?
Een cycloïde aandrijving is een uniek type snelheidsreductiemiddel dat een zeer hoge reductieverhouding biedt met een compact maar robuust ontwerp. Vergeleken met conventionele tandwielaandrijvingen, zoals rechte en planetaire, kan het veel hogere reductieverhoudingen tot 10 keer bereiken in dezelfde ruimte of fase. Daarnaast heeft het vrijwel geen speling, een hoger laadvermogen, stijfheid en een hoog rendement tot 90%. Deze eigenschappen maken de cycloïde aandrijvingen geschikt voor vele toepassingen waar positioneringsnauwkeurigheid en prestaties belangrijk zijn, zoals robotica, werktuigmachines, productieapparatuur enzovoort.
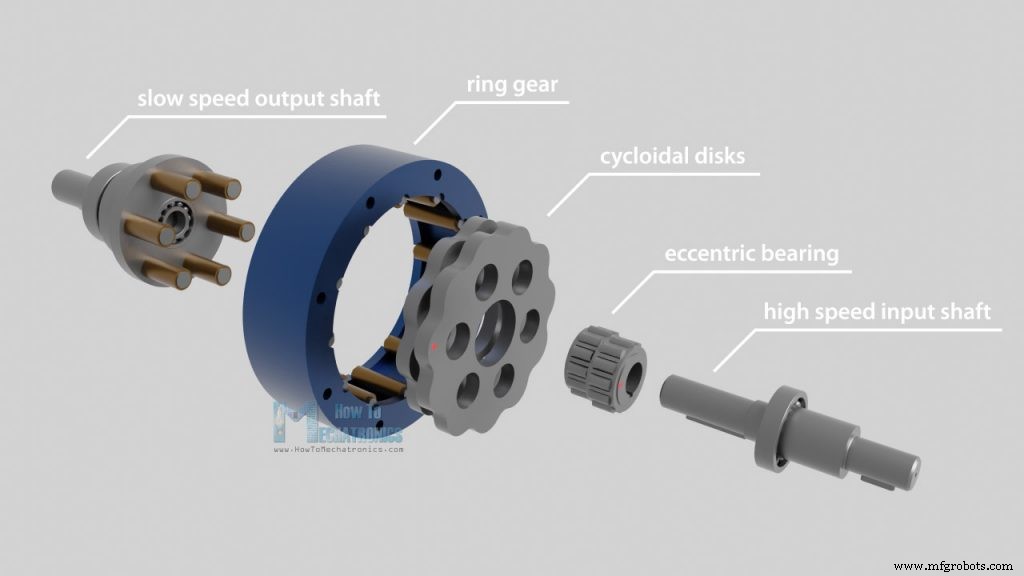
Laten we nu eens kijken wat erin zit en hoe een cycloïde aandrijving werkt. Een cycloïdale aandrijving bestaat uit vijf hoofdcomponenten, een snelle ingaande as, een excentrisch lager of cycloïdale nok, twee cycloïde schijven of nokkenvolgers, een tandwiel met pennen en rollen en een uitgaande as met lage snelheid met pennen en rollen.
De ingaande as drijft het excentrische lager aan en het excentrische lager drijft de cycloïde schijven rond de interne omtrek van het tandwielhuis aan. De excentrische beweging zorgt ervoor dat de tanden of lobben van de cycloïdale schijven zo ingrijpen met de rollen van het tandwielhuis dat ze een omgekeerde rotatie produceren met een lagere snelheid.
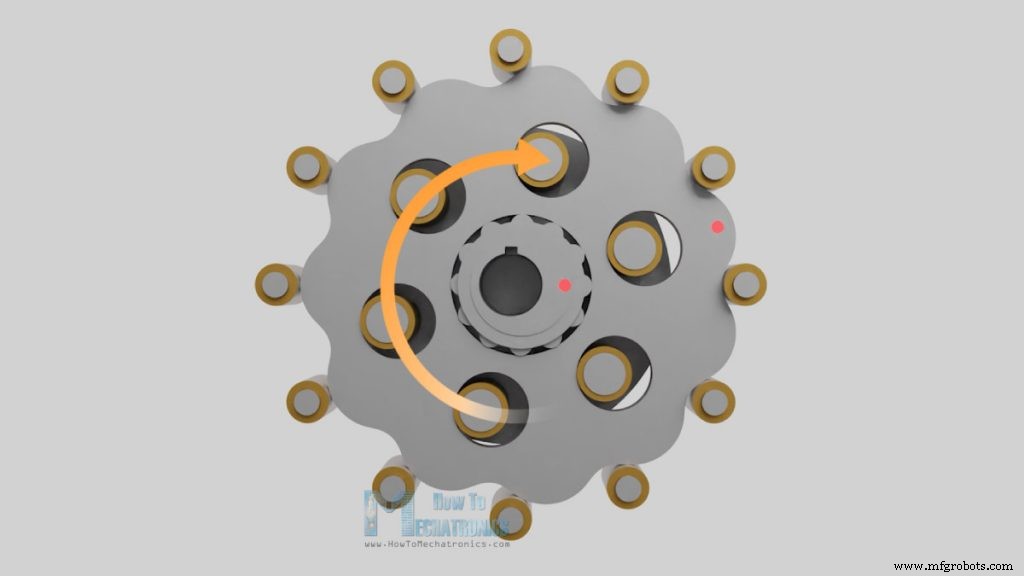
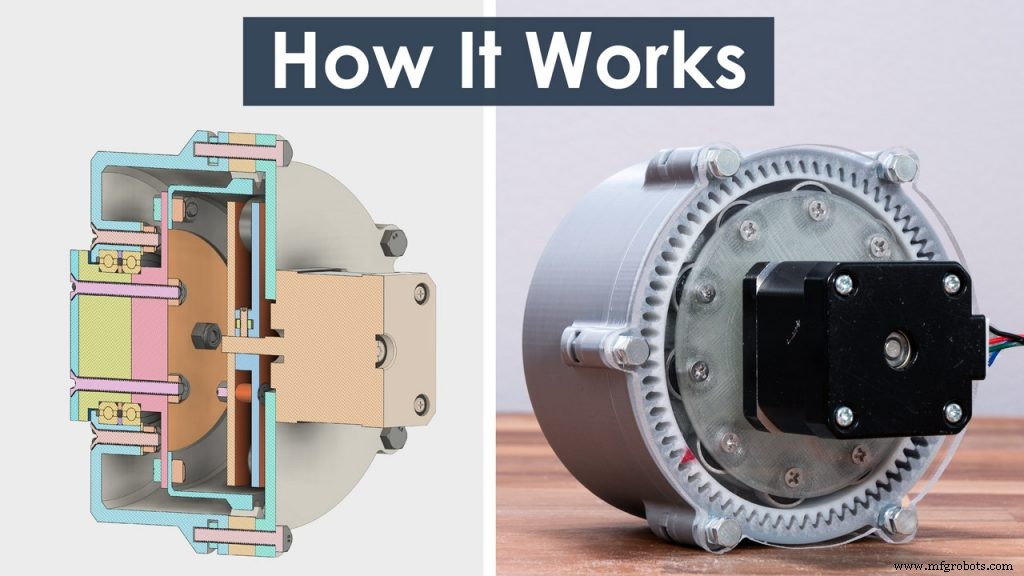
We kunnen hier van dichterbij kijken en zien dat het excentrische lager de cycloïde schijf tegen de ringwielrollen duwt.
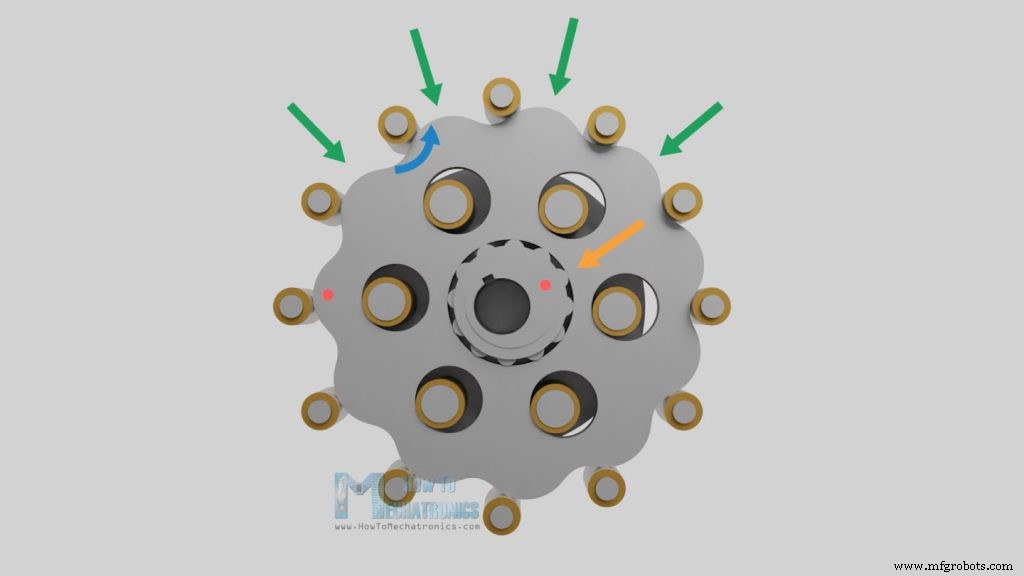
Vanwege de unieke schijfvorm en zijn positie ten opzichte van de tandwieltandwielen, kunnen we zien dat naarmate het excentrische lager vordert, de schijflobben voor de rotatie niet in staat zullen zijn om de volgende ringtandwielrol te passeren of te springen, maar in plaats daarvan zal het wegglijden of achteruit rollen. Dit gedrag veroorzaakt de omgekeerde rotatie van de schijven.
Over het algemeen is er één cycloïde kwab minder op de schijf in vergelijking met het aantal pinnen op het tandwielhuis. Dit zorgt ervoor dat, voor één volledige omwenteling van het excentrische lager, de cycloïde schijf slechts een afstand van één lob verplaatst. Hieruit kunnen we zien dat de reductieverhouding uitsluitend afhangt van het aantal pennen van het ringwiel.
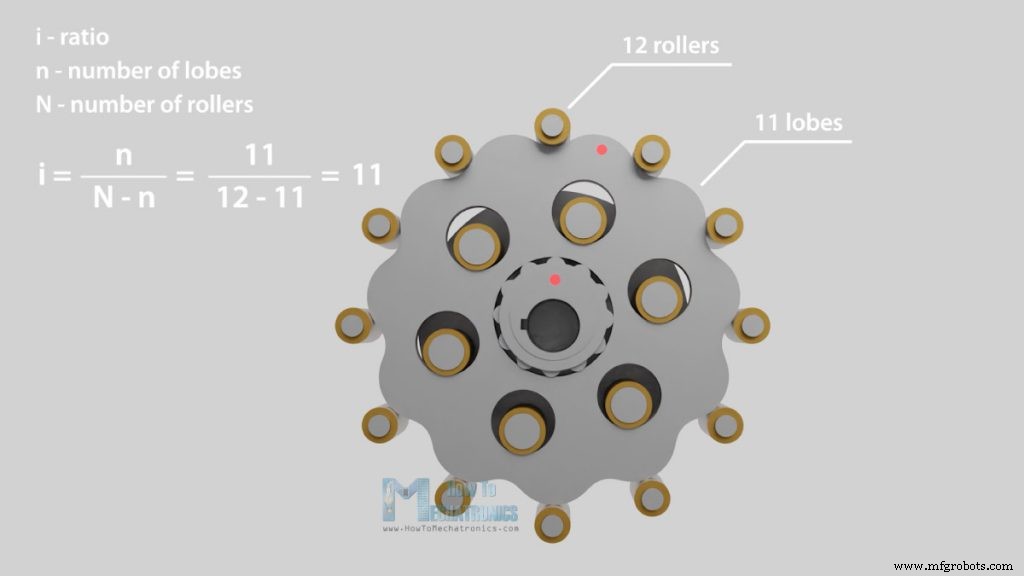
Hier hebben we bijvoorbeeld 12 pinnen op het ringwiel, wat 11 lobben op de cycloïde schijf betekent, en dat is een verhouding van 11:1, of 11 keer lagere uitvoersnelheid. De grootte van de schijven, de tandkransrollen of het excentrische lager hebben geen enkele invloed op het reductierantsoen.
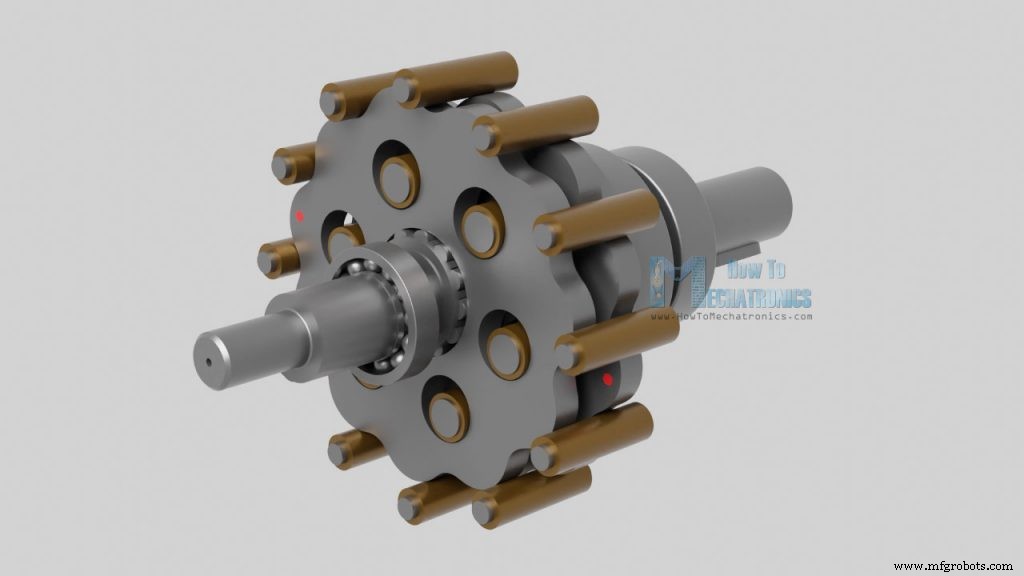
De verminderde rotatie wordt overgebracht op de pennen van de uitgaande as via de gaten in de cycloïde schijven.
Er zijn twee cycloïde schijven, 180 graden uit fase geplaatst om de onbalanskrachten veroorzaakt door de excentrische beweging te compenseren en een soepelere werking bij hogere snelheden te bieden.
De naam Cycloïdale aandrijving komt van het profiel van de schijf die op zijn beurt weer van een cycloïde komt, maar daarover meer in het volgende gedeelte van de video waarin we onze eigen cycloïde aandrijving zullen ontwerpen.
Een cycloïdale aandrijving ontwerpen
Dus nu we weten hoe een cycloïdale aandrijving werkt, kunnen we doorgaan met het ontwerpen van ons eigen model dat we in 3D kunnen printen. Als we dit demo-voorbeeld proberen te 3D-printen, zou het kunnen werken, maar het zou snel mislukken omdat het 3D-printmateriaal niet sterk genoeg is om de krachten en wrijving die in de versnellingsbak optreden te weerstaan.
De kritieke onderdelen zijn de rollen die meestal bussen zijn, wat een geweldige optie is als de materialen van metaal zijn, maar met een PLA-materiaal zullen we in plaats daarvan kogellagers moeten gebruiken.
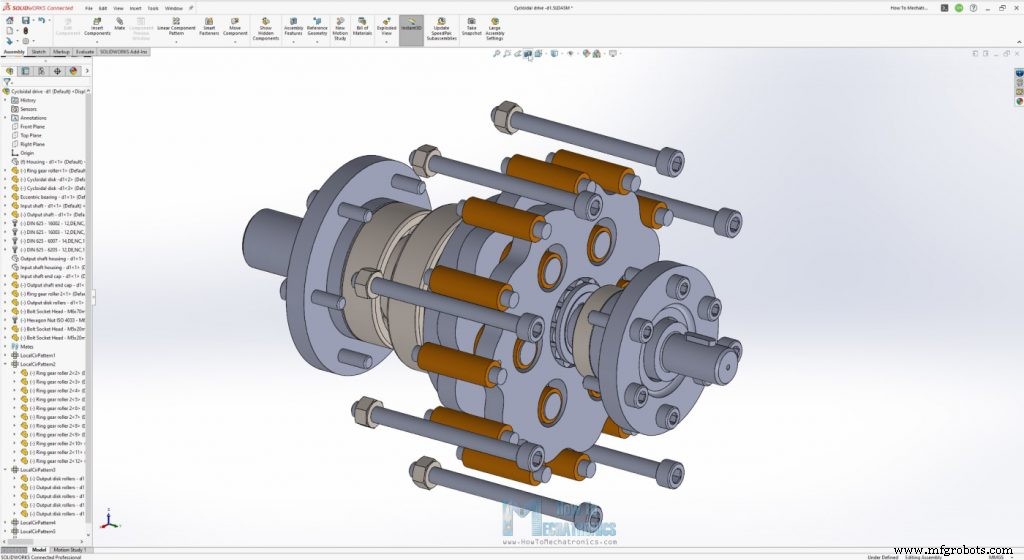
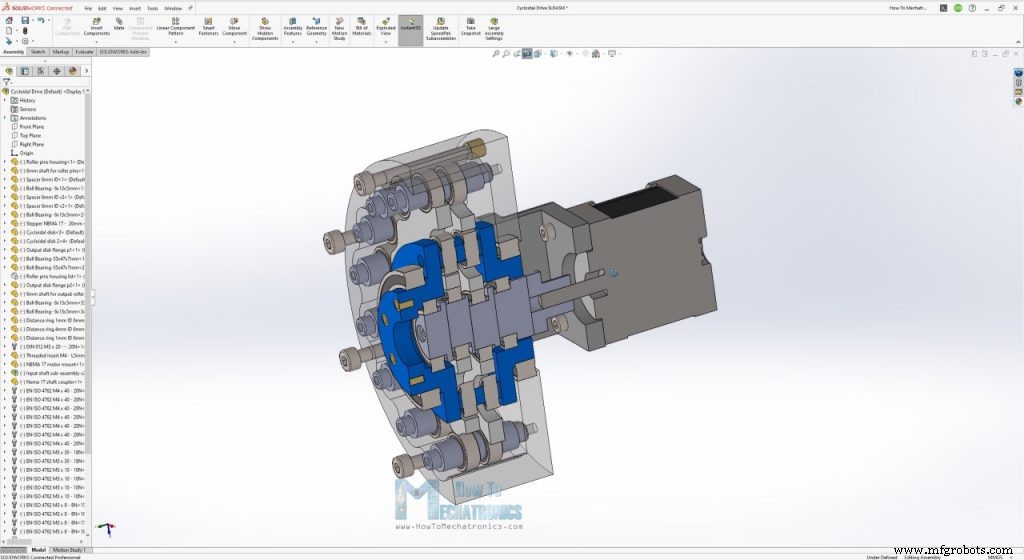
Met dat in gedachten, hier is de cycloïde aandrijving die ik heb ontworpen en die kogellagers voor de rollen gebruikt.
Bij het ontwerpen van een cycloïde aandrijving zijn er vier belangrijke invoerparameters die de grootte en vorm van de cycloïde schijven bepalen, en dat is de straal van het ringwiel, de straal van de rollen, het aantal van deze rollen en de excentriciteit.
DIY cycloïde aandrijving 3D-model
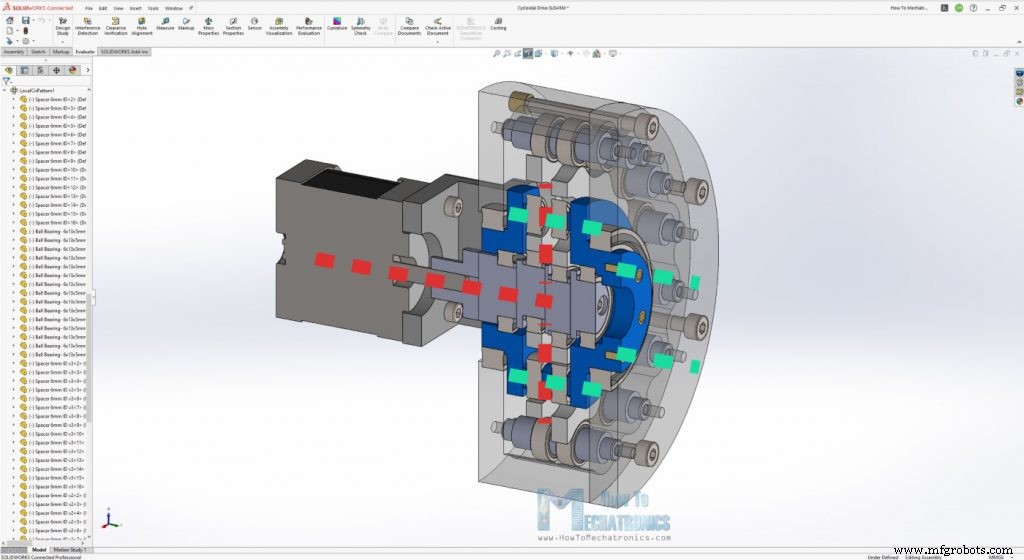
Hier is de cycloïde aandrijving die ik heb ontworpen met SOLIDWORKS en kogellagers voor de rollen gebruikt.
Op dit punt wil ik SOLIDWORKS een compliment geven voor het sponsoren van dit project. Heb je gehoord van 3DEXPERIENCE World; een jaarlijks evenement georganiseerd door SOLIDWORKS?
3DEXPERIENCE World 2022 brengt een levendige gemeenschap van ontwerpers, ingenieurs, ondernemers en makers samen om te leren, elkaar te ontmoeten en samen kennis te delen over de nieuwste technologieën en best practices.
Zorg ervoor dat u zich vandaag registreert op SOLIDWORKS.COM/3DXW22_HOWTOMECH , en neem virtueel gratis deel.
Desalniettemin kunt u dit 3D-model vinden en downloaden als STEP-bestand, en het ook in uw browser op Thangs verkennen:
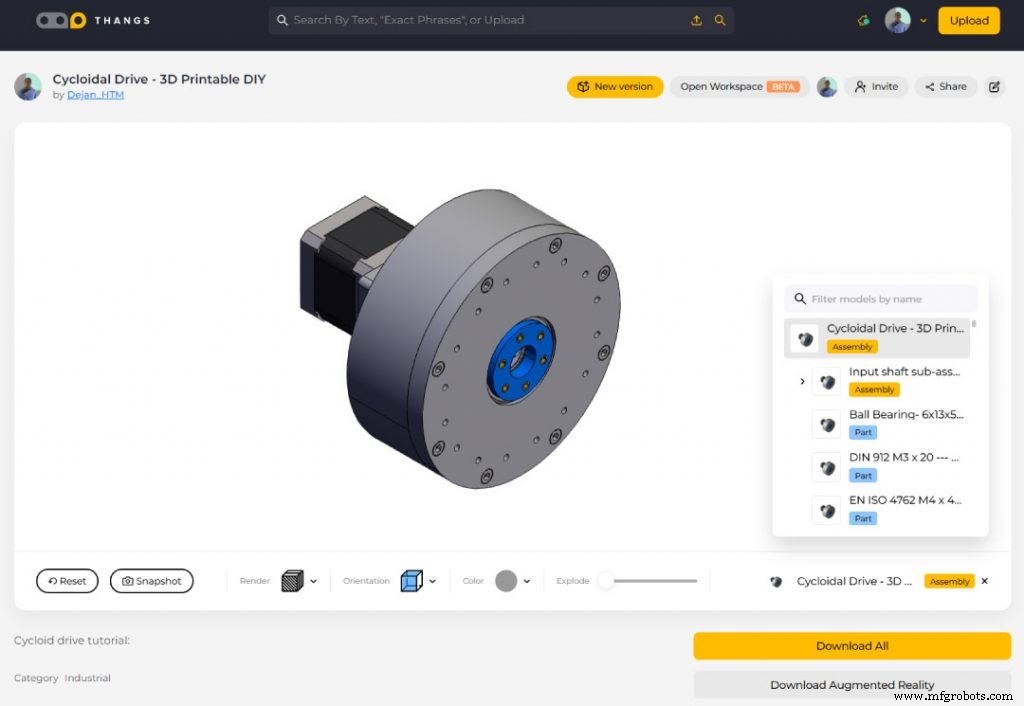
U kunt het .STEP-bestand van het 3D-model downloaden van Thangs.
Bedankt Thangs voor het ondersteunen van deze tutorial.
Wat betreft de STL-bestanden die worden gebruikt voor het 3D-printen van de onderdelen, u kunt ze hier downloaden:
Gerelateerd project
Wat is Strain Wave Gear, ook wel Harmonic Drive genoemd? Een perfecte uitrustingsset voor robotica-toepassingen!?
Ontwerpen
Het eerste dat ik definieerde was dat ik een reductieverhouding van 15:1 wilde voor deze versnellingsbak, wat betekende dat ik 16 tandwielen met tandwielen nodig had. Dus ik teken een schets in SOLIDWORKS met 16 rollen rond een cirkel.
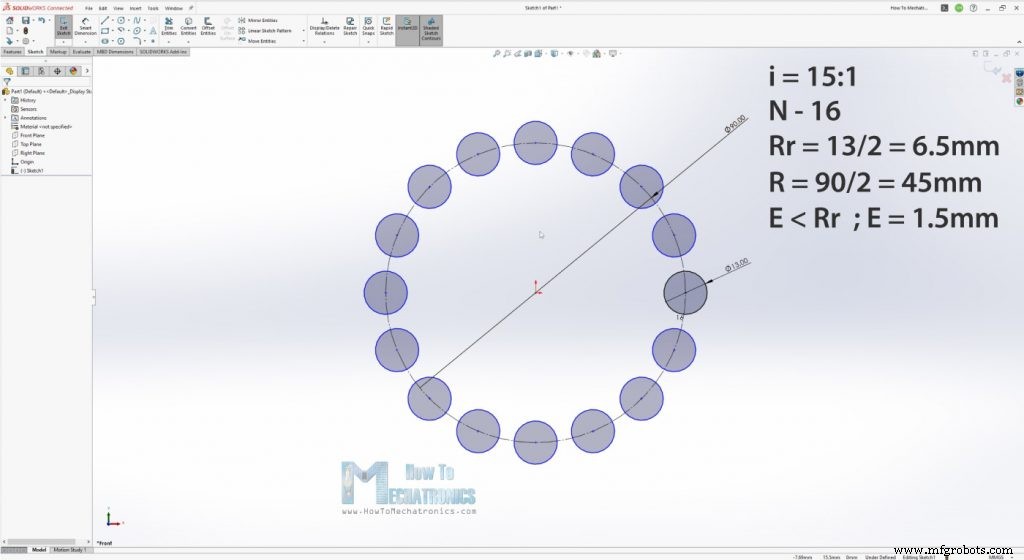
Toen koos ik ervoor om lagers te gebruiken voor de rollen met een buitendiameter van 13 mm. Nu kon ik aan de hand van deze twee parameters bepalen welke maat de diameter van het ringtandwiel moest zijn. Ik heb hem ingesteld op 90 mm. De excentriciteitswaarde moet kleiner zijn dan de helft van de roldiameter en ik koos een waarde van 1,5 mm.
Nu we de vier belangrijkste invoerparameters hebben, kunnen we de vorm of het profiel van de cycloïde schijf tekenen. Zoals ik al zei, komt het schijfprofiel van een cycloïde, een curve die wordt gevolgd door een punt op een cirkel terwijl deze langs een rechte lijn rolt zonder te slippen, of de variatie ervan, een epicycloïde die wordt getraceerd bij het rollen op een omtrek van een cirkel .
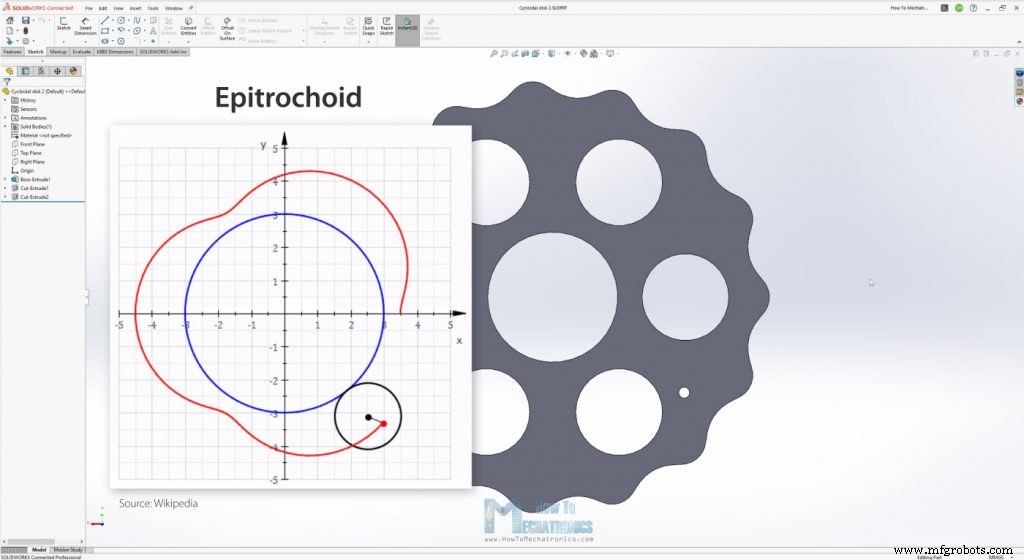
Er is nog een variant genaamd Epitrochoid, waarbij het traceerpunt zich op een afstand van het midden van de buitencirkel bevindt en dat is waar het cycloïdale schijfprofiel eigenlijk op is gebaseerd.
Voor het tekenen van zo'n curve kunnen we deze parametrische vergelijkingen hier gebruiken, maar er zijn ook andere parameters die erin kunnen worden opgenomen, zoals de diameter van de rol en de excentriciteit. Dit compliceert de zaken een beetje, maar gelukkig was er een geweldig document geschreven door Omar Younis voor de SOLIDWORKS Education-blog, waarin hij al deze parameters combineert in enkele X- en Y-parametrische vergelijkingen.
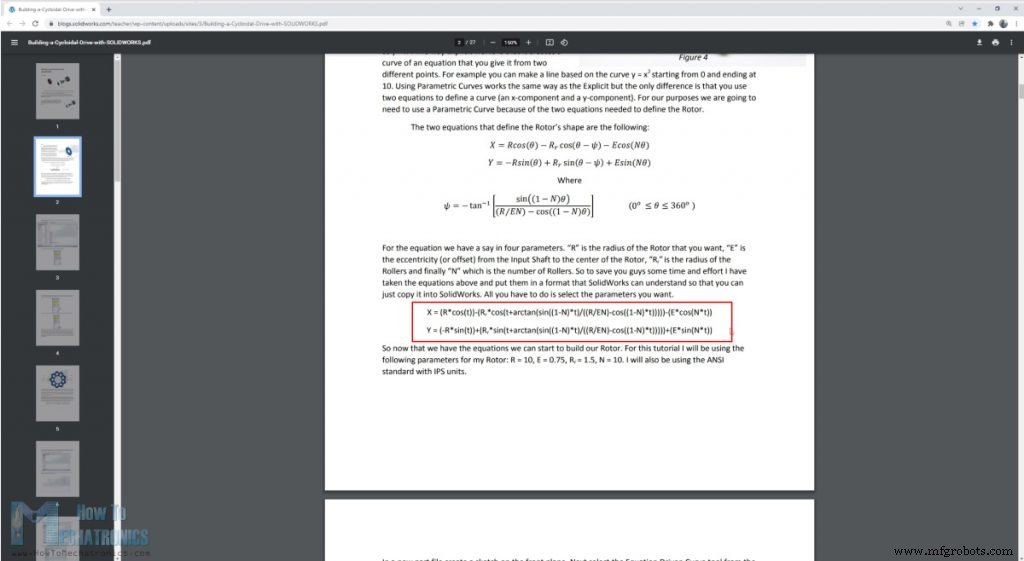
Dit zijn de vergelijkingen:
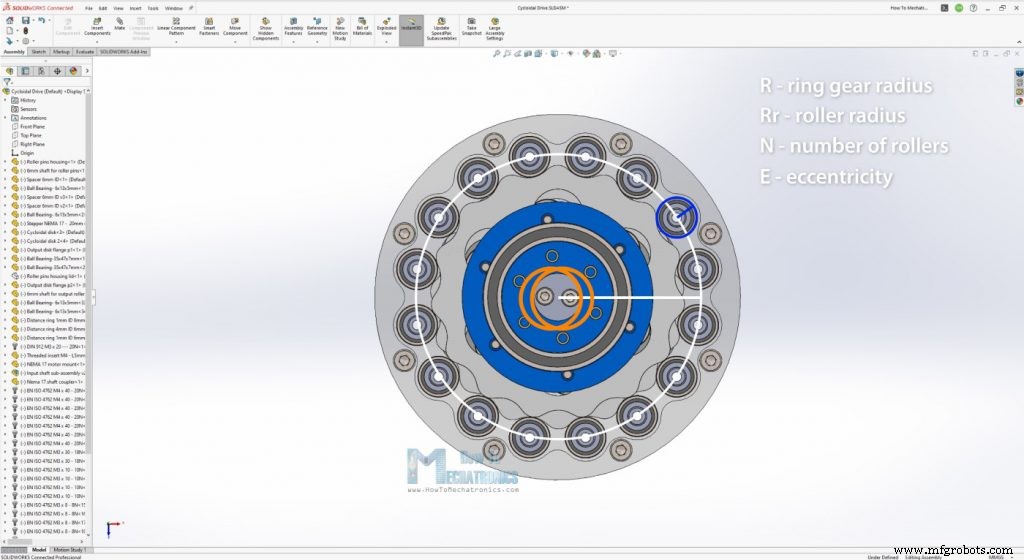
N - Number of rollers
Rr - Radius of the roller
R - Radius of the rollers PCD (Pitch Circle Diamater)
E - Eccentricity - offset from input shaft to a cycloidal disk
x = (R*cos(t))-(Rr*cos(t+arctan(sin((1-N)*t)/((R/(E*N))-cos((1-N)*t)))))-(E*cos(N*t))
y = (-R*sin(t))+(Rr*sin(t+arctan(sin((1-N)*t)/((R/(E*N))-cos((1-N)*t)))))+(E*sin(N*t))
===================
Values for this DIY Cycloidal Drive:
N = 16
Rr = 6.5
R = 45
E = 1.5
x = (45*cos(t))-(6.5*cos(t+arctan(sin((1-16)*t)/((45/(1.5*16))-cos((1-16)*t)))))-(1.5*cos(16*t))
y = (-45*sin(t))+(6.5*sin(t+arctan(sin((1-16)*t)/((45/(1.5*16))-cos((1-16)*t)))))+(1.5*sin(16*t))
Code language: Arduino (arduino)Om nu het profiel te genereren, kunnen we eenvoudig de Equations Driven Curve-tool van SOLIDWORKS gebruiken, de twee vergelijkingen op de juiste manier invoegen en dat zal het cycloïde schijfprofiel genereren. Natuurlijk moeten we voor de invoerparameters onze waarden invoegen.
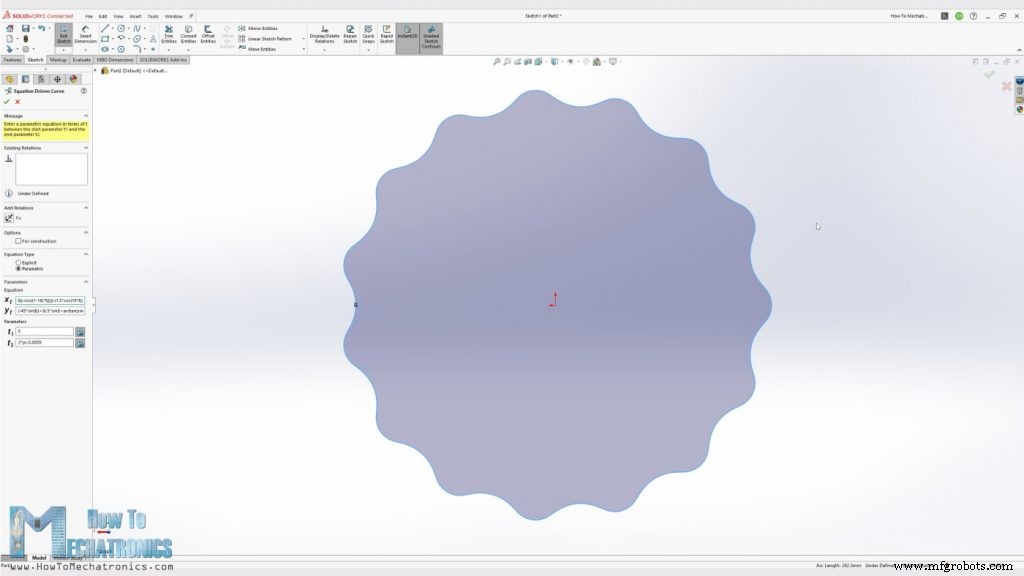
Houd er ook rekening mee dat de curve niet wordt gegenereerd als de "t" -parameters van 0 tot 2 * pi of 360 graden zijn. Dus we moeten de t2-parameter iets minder dan 2 * pi instellen en vervolgens de curve genereren met een kleine opening die we kunnen verbinden met behulp van een eenvoudige spline.
Nu we de belangrijkste parameters van onze cycloïde aandrijving hebben gedefinieerd, vinden de rest alleen maar technische oplossingen voor hoe alles wordt aangesloten. Nogmaals, aangezien we niet zo sterk 3D-printmateriaal gebruiken, heb ik de assen van de rollen ontworpen om aan beide zijden te worden ondersteund, evenals de ingaande as en de uitgaande as.
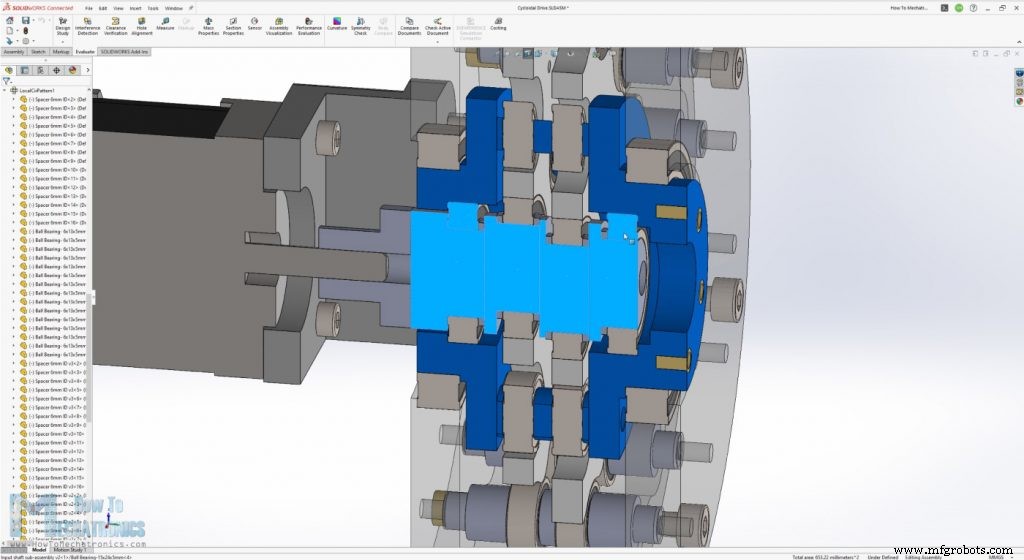
De ingaande as bestaat uit verschillende secties en wordt ondersteund door twee lagers in de uitgaande as. De uitgaande as wordt ook ondersteund met twee lagers in de behuizing.
Dus, om het werk van deze versnellingsbak samen te vatten, wordt de input van de motor overgebracht naar de excentrische ingaande as die de cycloïde schijven rond de tandwielring aandrijft.
De geproduceerde omgekeerde beweging die via de rollen van de uitgaande as op de uitgaande as wordt overgebracht. En dat was het, laten we het nu in 3D printen en kijken hoe het in het echt werkt.
3D-printen
Bij het 3D-printen van de onderdelen is het belangrijk om de Hole Horizontal Expansion-functie in uw snijsoftware te gebruiken.

Meestal zijn de gaten van 3D-geprinte onderdelen kleiner dan het oorspronkelijke formaat, dus met deze functie kunnen we dat samenstellen en een nauwkeurige afmeting krijgen, wat erg belangrijk is voor deze onderdelen. Ik heb de mijne ingesteld op 0,07 mm, en de horizontale expansie kan ook, die de buitenafmetingen van de onderdelen compenseert, op 0,02 mm. Natuurlijk moet u een aantal proefafdrukken maken om te zien welke waarden u de beste resultaten geven op uw 3D-printer.
De cycloïde versnellingsbak monteren
Dus hier zijn alle 3D-geprinte onderdelen, evenals de lagers en de bouten die nodig zijn voor het monteren van de cycloïde aandrijving.

Hier is een lijst van alle componenten die nodig zijn voor het monteren van deze cycloïde aandrijving:
- Kogellager 6x13x5mm 686-2RS – x44 …….. /
- Kogellager 15x24x5 6802-2RS – x4 ………….. /
- Kogellager 35x47x7 6807-2RS – x2 ………….. Amazon /
- 6x35mm stalen staaf …………………………………….. /
- Inzetstukken met schroefdraad …………………………………………. /
- M3- en M4-bouten van uw plaatselijke ijzerhandel - ik zal binnen enkele dagen een volledige lijst met bouten toevoegen die nodig zijn voor dit project
Ik begon met het inbrengen van de ringwielpennen in de behuizing. Deze pennen zijn geschikt voor de tandwielen of lagers, maar ze hebben een diameter van slechts 6 mm. Ik wist niet zeker of ze sterk genoeg waren om niet te breken onder de belasting van de cycloïde schijf.

Daarom heb ik ze hol gemaakt en erin gestoken metalen schachten van 3 mm die ik had liggen. Op deze manier zullen de pinnen zeker sterk genoeg zijn. Daar zijn natuurlijk slimmere oplossingen voor. In plaats daarvan zouden we bijvoorbeeld M6-bouten kunnen gebruiken, maar wat ik er niet leuk aan vind, is dat de M6-bouten iets kleiner zijn dan 6 mm, waardoor het lager zou wiebelen. Ideaal, hier zouden we een goede staaf van 6 mm kunnen gebruiken, die zelfs met deze specifieke maat van 35 mm gemakkelijk te koop is.
Zodra we alle pinnen op hun plaats hebben geplaatst, kunnen we de lagers in deze volgorde plaatsen, een 7 mm afstandsring, een lager, dan 3 mm afstandsring, een lager en nog een 7 mm afstandsring.

De cycloïde aandrijving zou nu moeten passen in dit ringtandwiel dat we hebben gemaakt, en als we proberen de schijf met een excentrische beweging te laten roteren, door opzij te duwen tijdens het draaien, zou de schijf omgekeerd moeten beginnen te draaien.
Vervolgens kunnen we de ingaande as monteren die uit vier secties bestaat. In elke sectie moeten we een lager en enkele afstandsringen plaatsen, en vanwege de excentriciteit kunnen we dat niet doen tenzij de as in secties wordt gemaakt.

Om de secties met elkaar te verbinden, gebruik ik twee M3-bouten die er allemaal doorheen gaan. We kunnen hier opmerken dat de gaten voor deze M3-bouten iets kleiner zijn gemaakt dan de M3-bouten, zodat de bout er een schroefdraad in maakt en strakker past.
Hier is hoe de as eruit zou moeten zien als hij is gemonteerd, maar ik moest de cycloïde schijven eigenlijk zo goed plaatsen, maar nu kon ik het niet. Dus heb ik het gedemonteerd en weer in elkaar gezet met de schijf er ook in.

Ik ging verder met het monteren van de uitgaande as. Hier moeten we de uitvoerrollen of lagers installeren, en we doen dat op dezelfde manier als getoond voor de ringwielrollen. Een pin van 6 mm, met lagers van 13 mm en enkele afstandsringen die door ongeveer 20 mm lange M3-bouten zijn gestoken.

Wanneer u deze uitvoerrollen door de openingen van de cycloïde schijf steekt, is het belangrijk om de twee schijven 180 graden uit fase ten opzichte van elkaar te positioneren. Om hierbij te helpen heb ik in beide schijven kleine gaatjes gemaakt die 180 graden uit fase zijn, dus hier hoeven we ze alleen maar op elkaar af te stemmen en kunnen we de rollen erdoorheen steken.

Houd er rekening mee dat dit een beetje krap past, maar als de afmetingen van het gat kloppen, kunnen we de pasvorm maken.

Nu kunnen we deze pennen aan de andere flens aan de andere kant bevestigen, maar daarvoor moeten we eerst wat schroefdraadinzetstukken in de flens installeren. Ik gebruik deze inzetstukken met schroefdraad om het geheel compacter te maken.

Dus zodra de ingaande en uitgaande as aan elkaar zijn gemonteerd, kunnen we deze hele constructie in de behuizing installeren via een lager met een buitendiameter van 47 mm.

Dan kunnen we nog zo'n lager in de voorkant van de as installeren en het deksel van de behuizing op zijn plaats plaatsen. Dit is ook een strakke pasvorm, aangezien alle 16 pinnen in hun behuizingsdekselsleuven moeten passen, dus we moeten een beetje kracht gebruiken om het in te brengen.

Aan de achterkant van de behuizing heb ik enkele M4-schroefdraadinzetstukken geïnstalleerd en vervolgens het deksel en de behuizing aan elkaar vastgemaakt met enkele 40 mm M4-bouten.

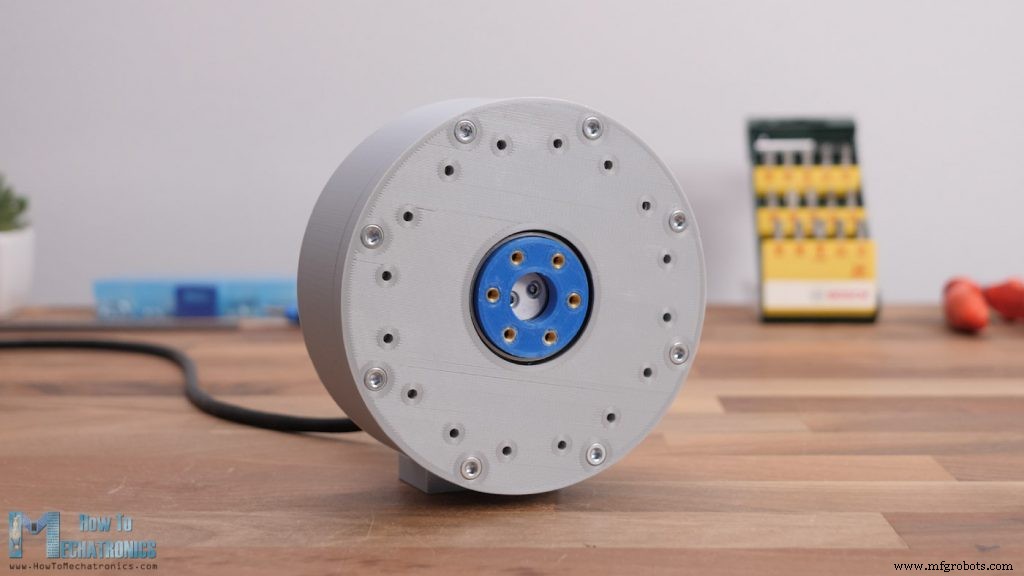
En dat is het! Als het eerlijk is om te zeggen, kijk dan eens naar deze schoonheid. Ik hou echt van hoe deze cycloïde versnellingsbak bleek te zijn, strak ontwerp zonder dat er iets uitkwam.

De cycloïde aandrijving testen
Laten we er echter nu een motor aan bevestigen en kijken hoe het zal werken. Aan de achterkant van de ingaande as heb ik nog een paar schroefdraadinzetstukken geïnstalleerd, zodat we gemakkelijk verschillende askoppelingen kunnen bevestigen.

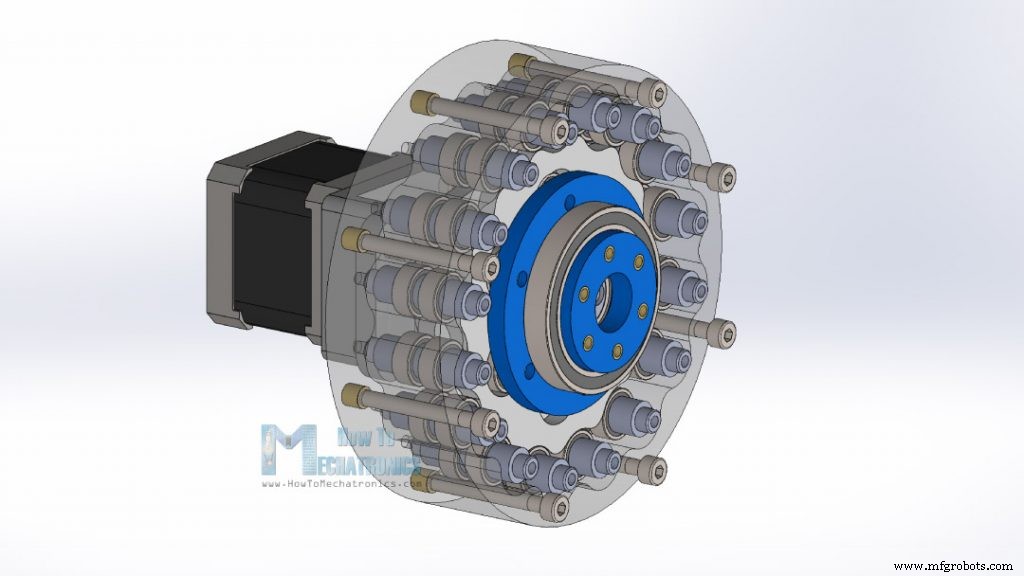
Voor het testen van de versnellingsbak zal ik een NEMA 17 stappenmotor gebruiken, dus ik heb een geschikte 3D-geprinte askoppeling aan de ingaande as bevestigd. Ik heb de stepper op een 3D-geprinte montagebeugel bevestigd en de motoras in de koppeling gestoken en de montagebeugel aan de behuizing bevestigd.

Een laatste ding is om wat inzetstukken met schroefdraad aan de voorkant van de uitgaande as te installeren, zodat we er dingen aan kunnen bevestigen. Hier is het uiteindelijke uiterlijk van deze cycloïdale aandrijving, in combinatie met een NEMA 17 stappenmotor, maar natuurlijk kunnen we hier elk ander type motor gebruiken.
En daar hebben we het. Om eerlijk te zijn, was ik echt verrast hoe soepel de output van deze versnellingsbak bleek te zijn. Van voren zien we zowel de ingaande als de uitgaande as tegelijkertijd draaien, in de tegenovergestelde richting en met een snelheidsverschil van 15:1.
Ik was ook in staat om de versnellingsbak te laten draaien zonder het voordeksel, en dus kunnen we alles zien wat eerder is uitgelegd in actie.

De beweging is gewoon fascinerend.
Aan het einde heb ik wat tests gedaan om de prestaties van de versnellingsbak te controleren. Nog iets om op te merken is dat deze cycloïdale aandrijving ook achteruit kan worden gereden, wat voor sommige toepassingen een goede eigenschap kan zijn.
Dus hier meet ik de kracht die deze versnellingsbak kan produceren op een afstand van 10 cm. Ik heb een waarde van ongeveer 26N, wat zich vertaalt naar koppel, is ongeveer 260 Ncm, en deze NEMA 17-stepper, die slechts 34 mm lang is, heeft een nominale waarde van 26 Ncm.
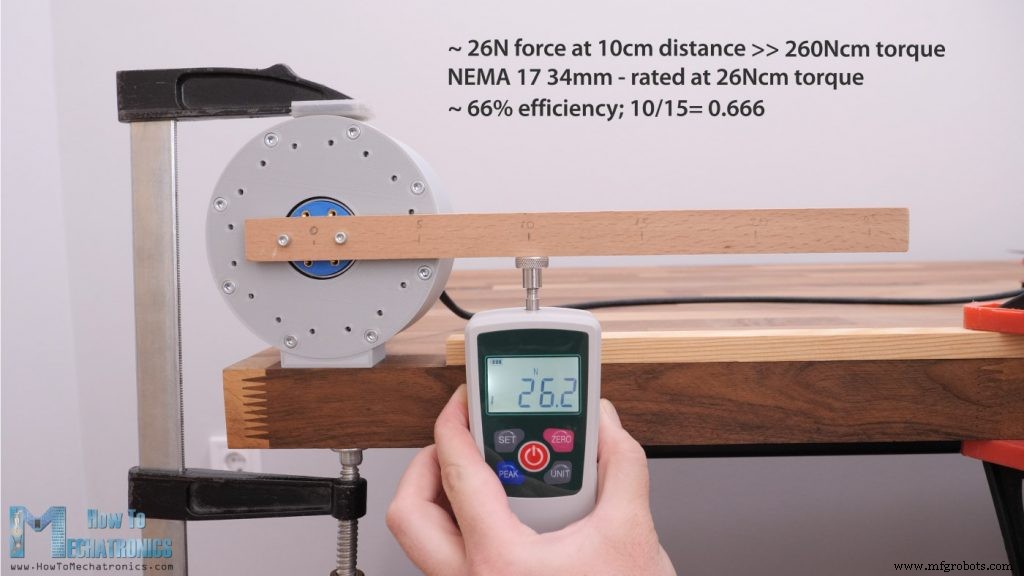
Dat betekent dat we met de cycloïde aandrijving een koppeltoename van ongeveer 10 keer hebben. Dat is een efficiëntie van ongeveer 66%, aangezien de reductieverhouding 15:1 is en in ideale omstandigheden hadden we een koppeltoename van 15 keer moeten hebben. Desalniettemin is dat nog steeds een geweldig resultaat, aangezien alles 3D-geprint is met een budget 3D-printer en de onderdelen niet zo nauwkeurig zijn als we zouden krijgen met sommige professionele printers of CNC-machines in het geval van een volledig metalen versnellingsbak.
Ik heb ook enkele nauwkeurigheidstests gedaan, die ook goede resultaten lieten zien.

Ik zou dit type versnellingsbak zeker gebruiken in toekomstige video's bij het maken van enkele robotprojecten.
Ik hoop dat je deze video leuk vond en iets nieuws hebt geleerd. Als je vragen hebt, stel ze dan gerust in de comments hieronder.
Industriële technologie
- Wat is multi-materiaal 3D-printen?
- Wat is Robocasting in 3D-printen?
- Wat rinkelt bij 3D-printen?
- Wat is een 3D Printing Marketplace?
- Wat is bioprinten?
- Wat is 4D-printen eigenlijk?
- Wat is pigmentafdrukken? Voordelen en nadelen van pigmentafdrukken
- Testen en functionaliteit van CNC, 3D-printen en het maken van hybride prototypes
- Wat is 3D-printen? - Soorten en hoe werkt het?
- Wat is radiografisch testen?- Soorten en voordelen
- 3D-printen:wat zijn de gevolgen voor bewerking en industrieel ontwerp?