


XANDAR streeft naar codegeneratie in veiligheidskritisch multi-core ontwerp
De volgende generatie van in een netwerk opgenomen embedded systemen vereist snelle prototyping en hoge prestaties met behoud van belangrijke kwaliteiten zoals betrouwbaarheid en veiligheid. De inzet van veiligheidskritieke embedded systemen heeft echter te lijden van complexe softwaretoolchains en engineeringprocessen. Ook maakt de huidige trend in autonome systemen die afhankelijk zijn van machine learning (ML) en kunstmatige intelligentie (AI)-toepassingen in combinatie met fail-operationele vereisten de verificatie en validatie van deze nieuwe systemen een uitdagende onderneming.
Om dit aan te pakken, heeft een driejarig door de Europese Unie gefinancierd project, genaamd XANDAR, tot doel een volwassen software-toolchain te leveren (van het vastleggen van vereisten tot de daadwerkelijke code-integratie op het doel, inclusief verificatie en validatie) die voldoet aan de behoefte aan snelle prototyping van interoperabele en autonome ingebedde systemen .
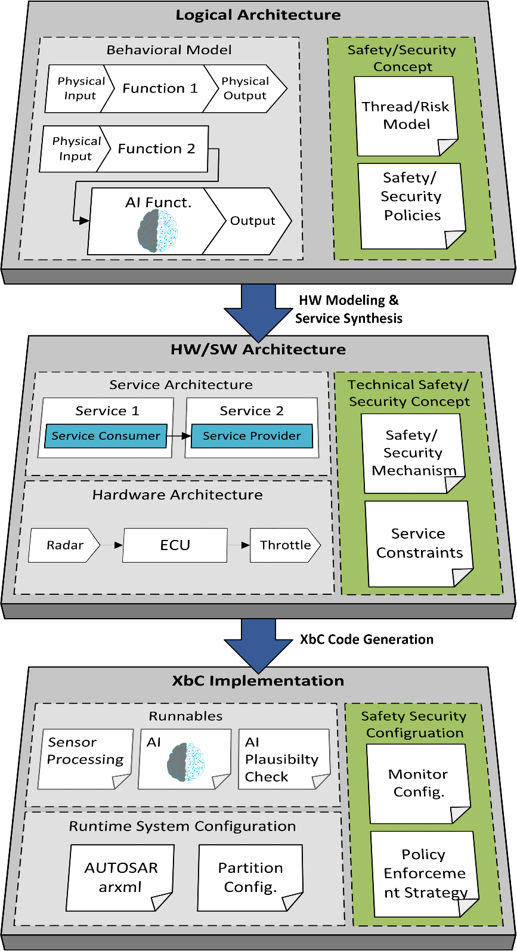
Uitgaande van een op modellen gebaseerde systeemarchitectuur, zal XANDAR gebruikmaken van nieuwe automatische modelsynthese en softwareparallellisatietechnieken om specifieke niet-functionele vereisten te bereiken die de basis leggen voor een nieuwe real-time, veiligheids- en beveiliging-door-constructie (X-by -Constructie, of XbC) paradigma.
De multi-core uitdaging in veiligheidskritieke omgevingen
Het tijdperk van parallelle verwerking heeft multi-core architecturen naar de mainstream geduwd, wat heeft geleid tot een situatie waarin ze in bijna alle toepassingsdomeinen worden gebruikt. De aanvankelijke uitdagingen bij het programmeren van multi-core architecturen, meestal gerelateerd aan synchronisatie en racecondities tussen parallel werkende uitvoeringsdraden, zijn nog steeds niet volledig opgelost.
Hoewel de situatie wordt verlicht door parallelle compilers, parallelle talen, speciale taalconstructies en de algemene groeiende ervaring van softwareontwikkelaars die gewend raken aan het nieuwe paradigma van programmeren, in veiligheidskritieke domeinen, moet multi-core nog steeds slagen. In omgevingen zoals auto's of ruimtevaart zijn verificatie en bewijs van foutloze werking essentieel, in strijd met de extra complexiteit en nieuwe bronnen van fouten in multi-core programmering.

In deze context kan modelgebaseerd ontwerp de antwoorden blijken te bieden en de kloof dichten tussen de huidige multi-core architectuurprogrammering en de vereisten van veiligheidskritieke domeinen.
Modelgebaseerd ontwerp van besturingsfuncties heeft de laatste decennia een groeiende belangstelling gekregen, vooral in de lucht- en ruimtevaart, de automobielindustrie en de procesindustrie, die steeds meer gebruik maakt van embedded elektronica en software. De belangrijkste reden voor deze trend is de mogelijkheid om het ontwikkelingsproces vanuit een hoger gezichtspunt te beheren, waarbij wordt geabstraheerd van het ontwerp van systemen op een laag niveau, terwijl de simulatie van het systeemgedrag en het genereren van code van de gemodelleerde functies mogelijk wordt gemaakt. Dit resulteert in kortere ontwikkeltijd en kosten.
Hoewel modelgebaseerd ontwerp steeds vaker wordt toegepast voor vroege systeemspecificatie, structurele modellering en verkenning van de ontwerpruimte, wordt de uiteindelijke software-implementatie voor kritieke embedded systemen vaak nog handmatig ontwikkeld.
End-to-end oplossingen die zich bewust zijn van enkele veiligheidsaspecten voor een geïsoleerd ingebed systeem zijn ontwikkeld in recente onderzoeksprojecten zoals ARGO, dat zich richt op WCET (worst case executietijd)-bewuste codegeneratie. In de afgelopen jaren zijn ook op modellen gebaseerde benaderingen van systeemengineering voor elektrische/elektronische architecturen ontwikkeld. Ze verdelen de architectuur in meerdere abstractielagen en gezichtspunten om de complexiteit tijdens het ontwikkelingsproces te beheersen, van analyse en ontwerp tot serieproductie. De belangrijkste redenen hiervoor kunnen worden gezien als analoog aan het modelgebaseerde functieontwerp, maar dan vanuit een architectuur- en systeemoogpunt.
De modelgebaseerde ontwikkeling van elk domein zijn typisch afzonderlijke lopende processen, waarbij architecturale beslissingen en informatie handmatig moeten worden gemodelleerd in de modelgebaseerde functieontwerptool of vice versa. Hoewel er uitwisselingsformaten bestaan voor individuele aspecten van een systeem, zoals communicatiematrices, zijn import-/exportprocessen vaak foutgevoelig en veroorzaken ze inconsistenties tussen de architectuur en het complementaire gedragsmodel, vooral wanneer rekening wordt gehouden met gedistribueerde en gelijktijdige samenwerking op de modellen.
Bestaande benaderingen en onderzoek passen architectuurmodellen aan met eenvoudige eindige toestandsmachinegedragsbeschrijvingen en gaan over het genereren van uitvoerbare architectuurspecificaties voor op simulatie gebaseerde verificatie. Dit moet echter verder worden ontwikkeld tot een holistische benadering die alle ontwerp- en verificatiestappen vastlegt binnen een geïntegreerde ontwikkelomgeving met behulp van een single-source metamodel.
Dit omvat met name de architectuurmodellering van gedistribueerde, in een netwerk opgenomen embedded systemen, de gedetailleerde geïntegreerde gedragsmodellering, de synthese in een cross-layer simulatiemodel, evenals de noodzakelijke verificatiestappen en daaropvolgende codegeneratie.
XANDAR streeft naar een dergelijke holistische benadering waarbij de codegenerator de vereiste X-by-construction (XbC) garanties biedt en de relevante niet-functionele eigenschappen van het invoermodel behoudt. XANDAR zal nieuwe innovaties op dit gebied introduceren door platformonafhankelijke ondersteuning voor het genereren van codes te bieden, waaronder het genereren van monitoring-runnables voor kritieke services en niet-deterministische versnellers voor AI- en ML-toepassingen.
Het aanpakken van deze uitdagingen vereist nieuwe concepten, geautomatiseerde beslissingsalgoritmen, formele controles en programma-optimalisaties, niet alleen voor prestaties en energie-efficiëntie, maar ook voor niet-functionele garanties. Het hele proces is onderhevig aan een afweging tussen realtime prestaties, energie-efficiëntie, niet-functionele garanties en flexibiliteit tijdens runtime. Hoogwaardige codegeneratoren en transformaties die al deze aspecten co-optimaliseren, vereisen nieuwe en gespecialiseerde oplossingen.
XANDAR-consortiumpartners
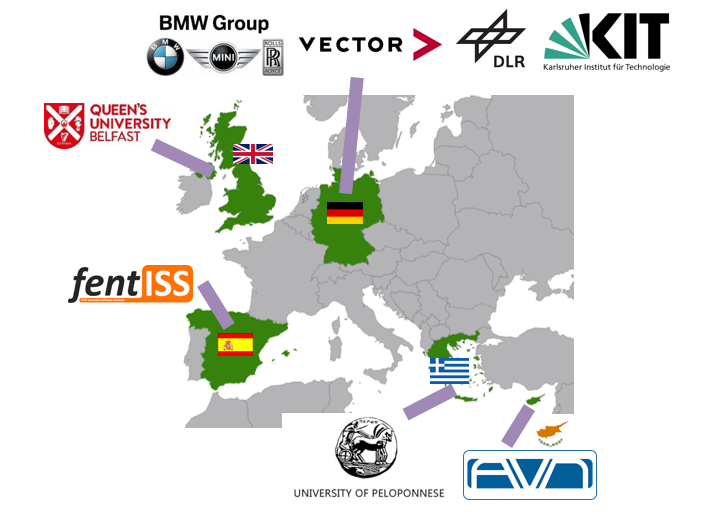
Het XANDAR-project is een driejarig programma dat afloopt in december 2023 en wordt gefinancierd door de EU voor een bedrag van € 5 miljoen in het kader van Horizon 2020. De partners in het consortium uit de industrie en de academische wereld, geleid door professor Jürgen Becker van het Karlsruhe Institute of Technology, zijn:
- Karlsruhe Instituut voor Technologie (Duitsland)
- Universiteit van Peloponnesos (Griekenland)
- Duits Lucht- en Ruimtevaartcentrum
- AVN Innovative Technology Solutions Ltd (Cyprus)
- Vector Informatik GmbH (Duitsland)
- Queen's University Belfast (Noord-Ierland)
- BMW Group (Duitsland)
- fentISS (Spanje)
Een van de acht XANDAR-consortiumpartners is Vector. Het bedrijf draagt bij aan het bereiken van de ambitieuze doelstellingen van het project op basis van zijn expertise als embedded softwarespecialist en met zijn krachtige ontwikkelomgevingen PREEvision en de TA Tool Suite.
Hier maakt PREEvision het mogelijk om verbonden embedded systemen gezamenlijk en modelgebaseerd te specificeren met goed gedefinieerde semantiek die alle systeemniveaus integreert. De TA Tool Suite kan worden gebruikt om het tijdgedrag van complexe realtime systemen te specificeren, simuleren en valideren. De twee omgevingen vormen de basis voor het opzetten van het X-by-Construction ontwerpraamwerk.
Ingebed
- Een taxonomie voor de IIoT
- Ontwerp voor maakbaarheid:een handleiding
- Een kort overzicht van IC-technologie voor microcontrollers en ingebedde systemen
- Motorbesturingen ontwerpen voor robotsystemen
- Hallsensor richt zich op veiligheidskritieke autosystemen
- Kontron en SYSGO:SAFe-VX computerplatform voor veiligheidskritieke systemen
- 5 tips voor het ontwerpen van plaatwerk
- Voordelen ingesloten technologieën voor modulair ontwerp
- Ontwerp voor het vervaardigen van PCB's
- Top 10 workflows voor fabrikanten
- Overwegingen bij het verlichtingsontwerp voor zichtsystemen voor robotchirurgie