


De 11 meest bruikbare basisprincipes voor robotprogrammering
Welke basiseigenschappen zijn het handigst om te weten wanneer u begint met het programmeren van robots?
Of je nu nieuw bent in de wereld van robotica of gewoon je programmeervaardigheden wilt verbeteren, hier zijn de belangrijkste basisprincipes van robotprogrammering die goed zijn om te weten.
Het kan soms voelen alsof je een graad in robotica nodig hebt om aan de slag te gaan met robotprogrammering. De conventionele benaderingen van industriële robotprogrammering lijken moeilijk te begrijpen voor nieuwe robotprogrammeurs.
Met een behoorlijke basis van robotica en goede robotprogrammeersoftware kun je echter gemakkelijk en snel aan de slag.
Hier zijn de 11 meest bruikbare basisprincipes van robotprogrammering:
1. Basisonderdelen van een robot
Voordat u begint met het leren programmeren van een robot, is het handig om de basisonderdelen van een industriële robot te begrijpen. Op die manier bent u in ieder geval vertrouwd met de fysieke machine die u gaat programmeren.
De meest elementaire onderdelen van een industriële robot met 6 DoF zijn bijvoorbeeld:
- Manipulatorarm
- Eindeffector
- Controller
- Stroombron
- Sensoren (indien aanwezig)
De componenten zullen enigszins variëren, afhankelijk van het type robot.
2. Vrijheidsgraden
Ik heb al een essentieel concept in robotica geïntroduceerd:Degrees of Freedom (DoF).
De DoF van een robot geeft aan met hoeveel onafhankelijke assen de robot kan bewegen. Een 6 DoF-manipulatorarm heeft bijvoorbeeld 6 onafhankelijk bestuurbare assen. Sommige DoF zijn "revolut" (d.w.z. ze draaien om een punt) en sommige zijn "lineair" (d.w.z. ze bewegen langs een lijn). Het is handig om vertrouwd te raken met de DoF van een robot voordat u deze programmeert.
3. Gewrichten en eindeffectoren
Het "zakelijke einde" van een robot (d.w.z. het deel dat aan de taak werkt) staat bekend als de "eindeffector". Wanneer u aan het programmeren bent, bent u meestal geïnteresseerd in het sturen van de eindeffector van de robot naar bepaalde locaties.
Om de robot te verplaatsen, moet je instructies sturen met de gewenste posities van elk van de DoF van de robot. Als u software zoals RoboDK gebruikt, kunt u in plaats daarvan de gewenste eindeffectorpositie rechtstreeks programmeren in plaats van specifieke gewrichtsposities te verzenden.
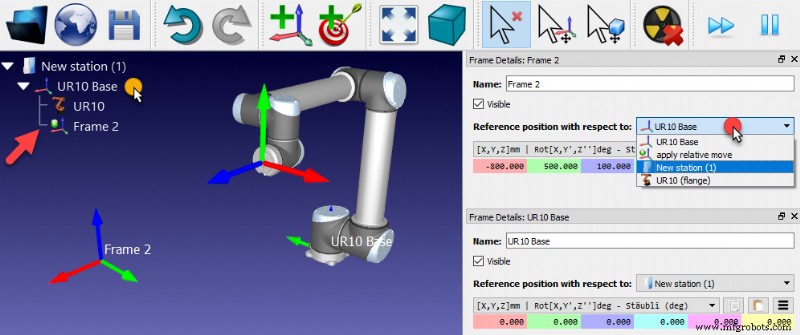
4. Pose:positie en oriëntatie
Hoe programmeer je de eindeffector om hem te vertellen waar hij heen moet?
De positie en oriëntatie van de eindeffector van de robot (of een andere locatie die u programmeert) worden gecombineerd om de "pose" te vormen. U moet de pose specificeren van elke locatie waar de robot naartoe zal gaan in uw programma. De meest gebruikelijke methode voor het specificeren van een pose bij het programmeren is via Euler Angles.
Zie voor meer informatie ons artikel Robot Euler Angles:The Essential Primer.
5. Middelpunt gereedschap (TCP)
Omdat we het meest geïnteresseerd zijn in de houding van de eindeffector wanneer we een robot programmeren, gebruiken we vaak de term Tool Center Point om te verwijzen naar het operationele centrum van het gereedschap.
Hier zijn enkele voorbeelden voor verschillende eindeffectors:
- Lijmpistool — U kunt de TCP zo instellen dat deze zich aan het uiteinde van het pistool bevindt.
- Grijper — De TCP bevindt zich mogelijk in het midden van de vingers van de grijper.
- Laspistool — De TCP bevindt zich misschien een paar millimeter van de punt van het pistool, waar de vlam het heetst is.
Als programmeur kies je waar het het meest logisch is om het TCP van de robot te plaatsen.
6. Kinematica
Een van de meer uitdagende aspecten van robotica is kinematica. Dit betekent alleen de geometrische opstelling van de robot. Kinematica wordt weergegeven als een vrij grote vergelijking of algoritme.
De Forward Kinematic-vergelijking beantwoordt de vraag "Als ik de gewrichten van de robot in een bepaalde positie zet, waar zal de TCP dan terechtkomen?"
Het Inverse Kinematic-algoritme beantwoordt de tegenovergestelde vraag "Als ik wil dat de TCP in deze pose terechtkomt, op welke positie moet ik de gewrichten dan instellen?"
Met goede robotprogrammeersoftware hoeft u waarschijnlijk niet uw eigen kinematica te formuleren, maar het kan handig zijn om het basisconcept te begrijpen.
7. Gezamenlijke limieten
De kinematische vergelijkingen beschrijven de robot met behulp van pure geometrie en wiskunde. Robots zijn echter fysieke machines. De fysieke robot kan vaak niet elke positie bereiken die de geometrie zegt te kunnen.
We introduceren gewrichtslimieten in de programmering om de beweging van de gewrichten van de robot alleen te beperken tot posities die fysiek mogelijk zijn. Ze vertellen het programma gewoon "Deze verbinding kan niet voorbij deze bepaalde hoek komen."
8. Verplaatsingstypes
Wanneer u de robot programmeert, zijn er verschillende soorten bewegingen die u de robot kunt laten maken.
De 3 basisbewegingen zijn:
- Gezamenlijke beweging — Dit is een snelle, ruwe beweging waarbij elk gewricht zo snel mogelijk zijn doelpositie probeert te bereiken. Om botsingen te voorkomen, mogen gewrichtsbewegingen alleen worden geprogrammeerd als de robot in de vrije ruimte beweegt.
- Lineaire verplaatsing — Dit is een gecontroleerde beweging langs een lijn tussen twee houdingen. De robot zal noodzakelijkerwijs langzamer bewegen met een lineaire beweging, maar zal ook geen nutteloze botsingen veroorzaken.
- Circulaire beweging — Als een lineaire beweging beweegt de robot in een gecontroleerde lijn, deze keer langs een cirkelvormig pad.
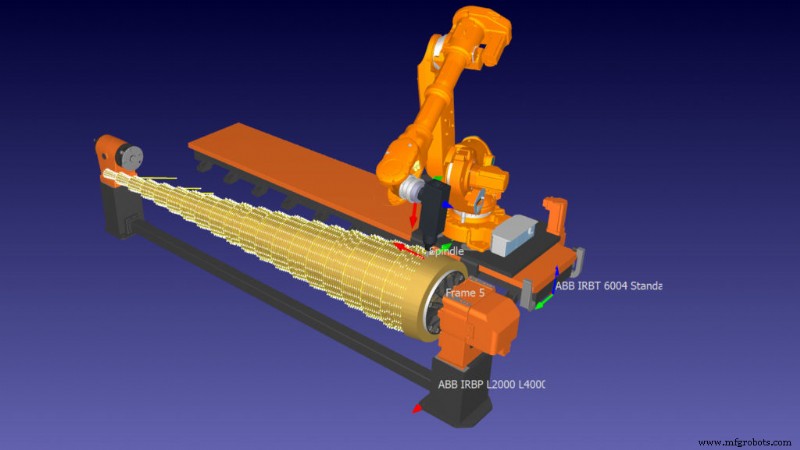
9. Simulatie en offline programmeren
Er zijn veel verschillende manieren om een robot te programmeren, waaronder "je handen vuil maken" met de (meestal complexe) programmeertaal van de robotfabrikant.
Simulatie en offline programmeren bieden een eenvoudigere programmeermethode. In plaats van de fysieke robot direct te programmeren, programmeer je een gesimuleerd model van de robot met behulp van intuïtieve commando's. De software zet het programma vervolgens om in code die de fysieke robot kan begrijpen.
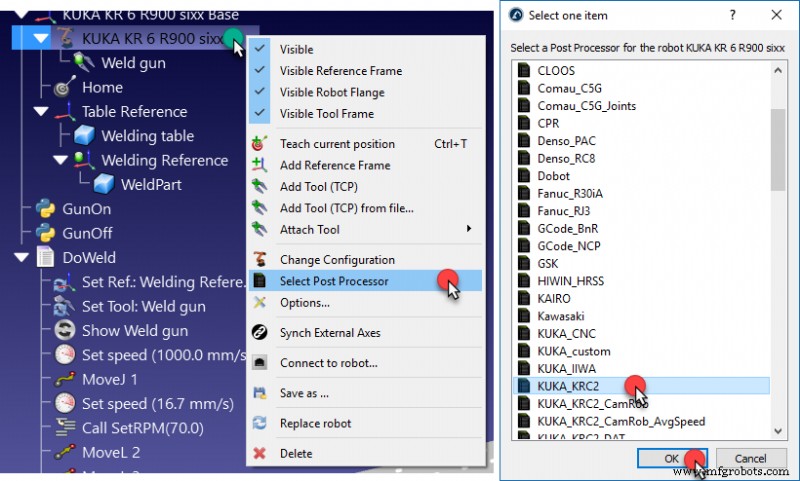
10. Postprocessors
Het deel van offline programmeersoftware dat het robotprogramma converteert, staat bekend als een postprocessor. De programmeersoftware heeft voor elke robotfabrikant een andere postprocessor, soms meer dan één.
U kunt meer te weten komen over postprocessors in ons artikel Robotpostprocessors:alles wat u moet weten.
11. Foutopsporing
Welke programmeermethode u ook gebruikt, een essentiële basisvaardigheid is debuggen. U moet altijd fouten in uw programma opsporen om er zeker van te zijn dat het werkt zoals u het bedoeld heeft, voordat u uw robot in een productieomgeving laat draaien.
Offline programmeren biedt u een extra debuggingstap omdat u een gesimuleerd model van de robot programmeert voordat u het programma downloadt naar de fysieke robot zelf, wat de kans op fouten verkleint.
Als je meteen aan de slag wilt met het programmeren van robots, kun je hier een gratis proefversie van RoboDK downloaden.
Bij welke basisaspecten van robotprogrammering zou je hulp willen? Vertel het ons in de reacties hieronder of neem deel aan de discussie op LinkedIn, Twitter, Facebook, Instagram of in het RoboDK-forum.
Industriële robot
- De voordelen van bewaking op afstand, programmering op afstand en voorspellend onderhoud
- Knikgestuurde robots:gids voor de meest bekende industriële robot
- Cartesiaanse robots:gids voor de meest schaalbare robottechnologie
- SCARA Robots:gids voor de meest veelzijdige en gewilde robot
- Commentaar:de methoden van robotprogrammering begrijpen
- Wat is TPU-filament? De basis en handige gids.
- Wanneer is het juiste moment om te investeren in programmeertools voor robots?
- Industriële robotprogrammering voor beginners
- De juiste robotverzamelsoftware kiezen
- Fanuc-coatingrobot:de P-250iA
- De interne werking van de Motoman K6-robot