


5 deskundige manieren om een FANUC-robot te programmeren
U hebt besloten dat een FANUC-robot de beste keuze is voor de door u gekozen toepassing.
Maar wat is de beste manier om een FANUC te programmeren?
Heeft u een echte keuze of moet u de standaardoptie van de fabrikant gebruiken?
Met hun opvallende felgele robots is de Japanse robotfabrikant FANUC een populaire keuze voor mensen die robotautomatisering aan hun bedrijf willen toevoegen.
U wilt er zeker van zijn dat u het meeste uit de door u gekozen robot haalt... en dat betekent dat u de beste programmeermethode moet kiezen.
Waarom de standaardmanier om een FANUC te programmeren beperkend is
U kunt ervan uitgaan dat u de standaard programmeermethode van FANUC moet gebruiken. Dit is een veel voorkomende veronderstelling; het is zeker waar dat veel mensen de standaardmethode gebruiken om hun FANUC-robots te programmeren.
Er zijn 2 standaard programmeermethoden met een FANUC-robot.
Dit zijn:
- TP — Dit is de taal die wordt gebruikt door FANUC teach pendants. Ze kunnen worden bewerkt door de leerhanger en worden opgeslagen als een binair bestand.
- Karel — Dit is een van Pascal afgeleide programmeertaal (zoals veel industriële robottalen zijn). Dit kan worden gebruikt om de robot te programmeren met behulp van een teksteditor.
Als jij of iemand in je team ervaring heeft met het programmeren van Karel, of als je ervaring hebt met het gebruik van FANUC teach pendants, dan zijn deze programmeermethoden wellicht een haalbare optie voor jou.

De standaardmethoden voor het programmeren van robots zijn echter vaak veel moeilijker te gebruiken dan ze zouden moeten zijn. Ze missen ook de krachtige functionaliteit die bij andere programmeermethoden hoort.
Je zou meer intuïtieve, krachtige programmering kunnen missen als je gewoon voor de standaardoptie kiest.
5 deskundige manieren om een FANUC-robot te programmeren
De beste manier om een robot te programmeren is er een die uw bestaande vaardigheden ten volle benut. Eentje waarmee je ook toegang hebt tot alle mogelijkheden die je nodig hebt van de robot.
Hier zijn 5 geweldige manieren waarop u uw FANUC-robot kunt programmeren; manieren die het beste gebruik maken van uw vaardigheden en de mogelijkheden van de robot:
1. Met de Teach-hanger
Natuurlijk wordt de standaardmanier voor het programmeren van een robot veel gebruikt door experts in FANUC-programmering. De leerhanger die bij de robot wordt geleverd, geeft je toegang tot veel aspecten van de kernfunctionaliteit.
Het programmeren van hangers aanleren brengt veel werk met zich mee; op de knop drukken, door menu's navigeren en de robot met het oog naar de gewenste positie duwen (een techniek die bekend staat als "joggen"). Het maken van een programma van een redelijke omvang en complexiteit is een langdurig proces. Het is een even moeizaam proces om later wijzigingen in het programma aan te brengen.
Programmeren van leren hangers kan krachtig zijn in de juiste handen. Het grote probleem is echter dat het een online programmeermethode is die lang duurt. Dit betekent dat de robot buiten werking moet worden gesteld om hem te herprogrammeren, waardoor de productiviteit afneemt.
2. Met op tekst gebaseerde offline programmering
U kunt de negatieve effecten van online programmeren verminderen door in plaats daarvan offline te programmeren met uw FANUC-robot. Dit betekent dat u het programma op een computer maakt. Je kunt het dan downloaden naar de controller van de robot als het klaar is.
De meest rudimentaire vorm van offline programmeren is om het programma in een teksteditor te coderen; met behulp van de Karel-programmeertaal van FANUC. Hiervoor moet je echter veel ervaring hebben met het programmeren van FANUC-robots. Het ontbreekt u aan een manier om het programma te debuggen terwijl u bezig bent. Als gevolg hiervan zal de foutopsporingsfase op de fysieke robot langer zijn en vergelijkbare vertragingen veroorzaken als online programmeren.
3. Met grafische offline programmering
Een betere manier om uw FANUC-robot offline te programmeren, is door speciale offline programmeersoftware te gebruiken. Hiermee kunt u het programma van de robot maken en debuggen. U kunt dit doen met behulp van een grafische simulator voordat u de robot ooit uit productie hoeft te nemen.
Natuurlijk zijn sommige offline programmeertools gemakkelijker te gebruiken dan andere. RoboDK is bijvoorbeeld offline programmeer- en simulatiesoftware die iedereen kan gebruiken, zelfs zonder ervaring met robotica.
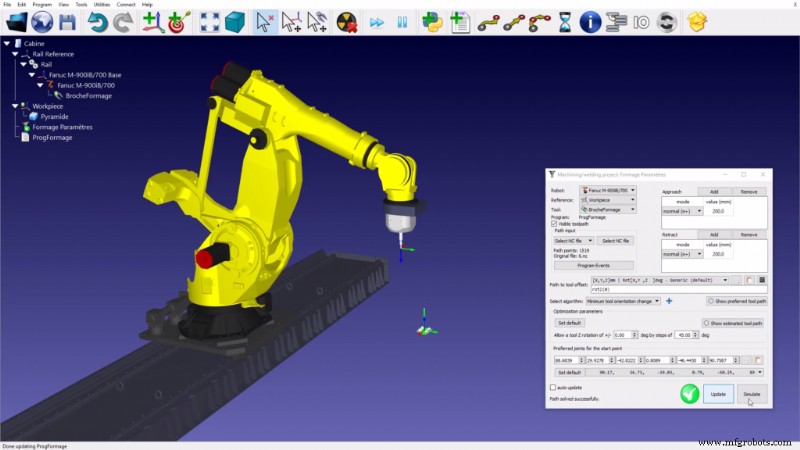
RoboDK biedt een intuïtieve grafische interface en voegt extra mogelijkheden toe aan uw robotprogrammering. Deze zijn niet beschikbaar met conventionele methoden zoals; speciale bewerkingswizard, 3D-printmogelijkheden en nog veel meer.
4. Met uw favoriete programmeertaal
Als je een ervaren programmeur bent, maar niet veel specifieke ervaring hebt met FANUC's of robotica, vraag je je misschien af of je je robot kunt programmeren in je favoriete taal.
In het verleden zou dit moeilijk zijn geweest, omdat het inhield dat er wrapperbibliotheken en mogelijk netwerkcommunicatiebibliotheken moesten worden gemaakt om te communiceren met de controller van de robot. Maar nu is het zowel mogelijk als gemakkelijk.
Met RoboDK kunt u een van de vele programmeertalen op hoog niveau gebruiken om uw FANUC te programmeren. U kunt het programma offline testen in de simulator voordat u het naar de robot downloadt.
5. Met een handsonde
Alle vier de voorgaande methoden omvatten op zijn minst enig begrip van geometrie en robotprogrammering. Zelfs met grafische offline software, waar je de robot kunt slepen in de grafische simulatie. Je moet nog steeds nadenken over hoe de gesimuleerde omgeving zich verhoudt tot de echte wereld.
Dat gezegd hebbende, is er nog een deskundige manier om een FANUC-robot te programmeren die nog gebruiksvriendelijker is dan de rest.
Met RoboDK TwinTrack kunt u het programma eenvoudig maken door de gewenste beweging van de robot te volgen met een handsonde. De robot herhaalt vervolgens die exacte beweging. TwinTrack is ook compatibel met offline programmering, zodat het geen invloed hoeft te hebben op de productie van de robot.
Wat is de beste manier om uw FANUC-robot te programmeren?
Dus, welke van deze programmeermethoden is het beste voor jou?
Zoals gezegd, is de beste programmeermethode er een die het beste gebruik maakt van je bestaande vaardigheden als programmeur en je toegang geeft tot de meeste mogelijkheden van de robot.
Natuurlijk, de standaardmethode die bij FANUC-robots wordt geleverd, voldoet mogelijk aan deze criteria.
Met de andere opties die in dit artikel worden genoemd, hebt u gemakkelijker toegang tot krachtigere functionaliteit. Je hoeft niet eindeloos op knoppen op de leerhanger van de robot te drukken of jezelf in de knoop te leggen met de Karel-programmeertaal.
Als u uw FANUC met RoboDK wilt programmeren, kunt u een gratis proefversie krijgen op de RoboDK-downloadpagina.
Bekijk onze speciale documentatiepagina voor meer instructies over het programmeren van een FANUC-robot met RoboDK.
Welke problemen heb je bij het programmeren van FANUC-robots? Vertel het ons in de reacties hieronder of neem deel aan de discussie op LinkedIn, Twitter, Facebook, Instagram of in het RoboDK-forum.
Industriële robot
- Microprocessor-programmering
- 5 stappen om offline te programmeren met een FANUC-robot
- CNC-robotprogrammering in 7 eenvoudige stappen
- De 11 meest bruikbare basisprincipes voor robotprogrammering
- Industriële robotprogrammering voor beginners
- Nieuwe manieren om te automatiseren met robotica in 2022
- De robotmarkt:Fanuc Robotics
- Fanuc-coatingrobot:de P-250iA
- Fanuc plukrobot met hoge snelheid
- Robotprogrammering met RobotStudio van ABB
- De Fanuc P-50iB schilderrobot