


Robotische arm van gerecycled materiaal
Componenten en benodigdheden
| × | 3 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 |
Apps en online services
 |
| |||
 |
|
Over dit project
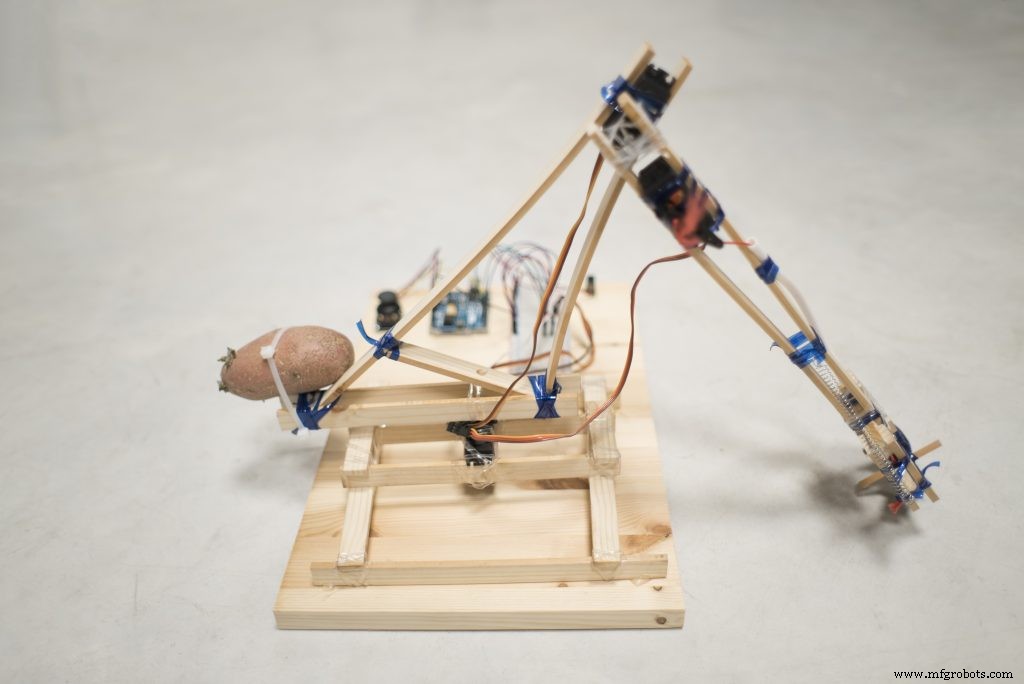
Robotarmen zijn een van de meest populaire doe-het-zelfprojecten die je online zult vinden. Toen we gingen zitten om onze versie van een Arduino-robotarm te ontwerpen, besloten we een uitdaging aan te gaan en deze te maken van gerecyclede materialen. De manier waarop wij het zien, een maker zijn, betekent ook out of the box denken en jezelf afvragen hoe je verschillende materialen kunt gebruiken die voor jou beschikbaar zijn, zonder meer afval te produceren. Met stukjes sloophout en wat plastic flessen hebben we de body van de robotarm in elkaar gezet. We maakten krimpkousen van plastic flessen met een handige techniek die we online hebben geleerd, en gebruikten een aardappel (!) als gewicht zodat de robot niet zou omvallen.
Dit project was erg leuk voor ons, omdat het ons eraan herinnerde waarom we dol zijn op maken zo veel.
Je kunt ook de volledige tutorial voor dit project en andere vinden op onze blog.
Opmerking:in de video je ziet een eerdere versie van circuito.io, daarom kun je het beste de stappen in de tutorial volgen.
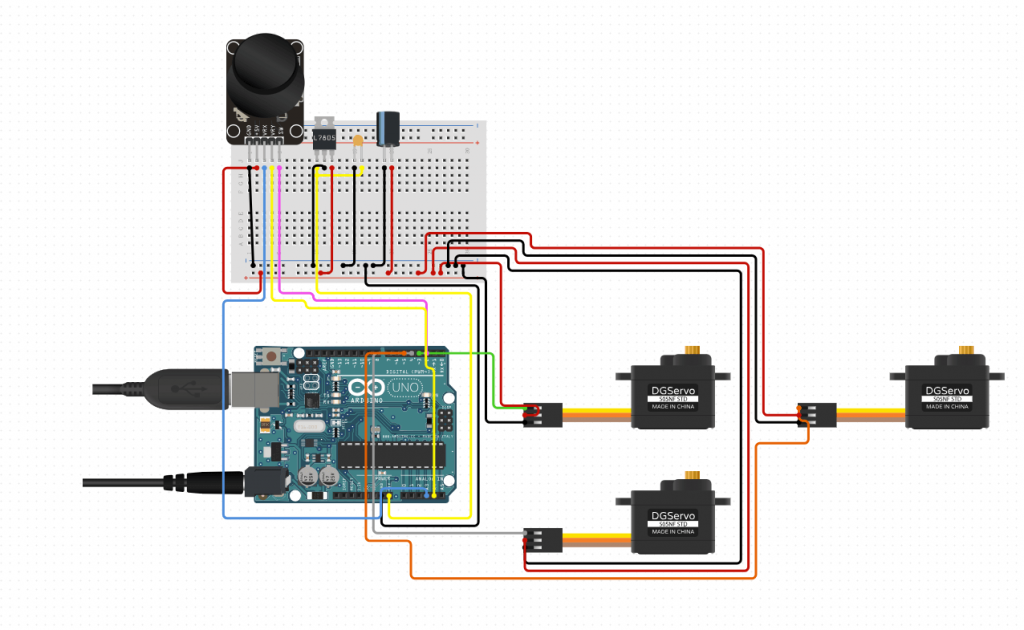
Elektronica
Hoofdcomponenten
- Arduino UNO
- 3 SparkFun-servo's (generieke Metal Gear)
- PS2 Joystick 2-assige module
Secundaire componenten
- Spanningsregelaar 5v
- Elektrolytische condensator - 1uF/50V
- Condensator Keramiek 100nF
- HeatSink TO-220
- Broodplank - Halve Grootte
- Set met jumpers - M/M
Klik hier om het bedradingsschema te zien
Robotarmcode
- Eerst moet je de circuitcode downloaden van het codetabblad op circuito.io.
- Volg de stappen om te controleren of je het correct hebt aangesloten
- Vervang de firmware.ino-testcode van circuito.io door de firmware.ino-code in de repository. Laat de andere bibliotheken zoals ze zijn.
- Zorg ervoor dat u 'Bibliotheken opnemen' en 'Pindefinities' laat staan. Controleer of de pindefinities overeenkomen.
Materialen

- We gebruikten houtsnippers van 1 cm dik die we in onze werkplaats hadden. Op sommige plekken hebben we 2 stukken aan elkaar gelijmd voor extra stevigheid en robuustheid. Je kunt controleren op andere materialen die je om je heen hebt, maar zorg ervoor dat het stevig en toch flexibel is.
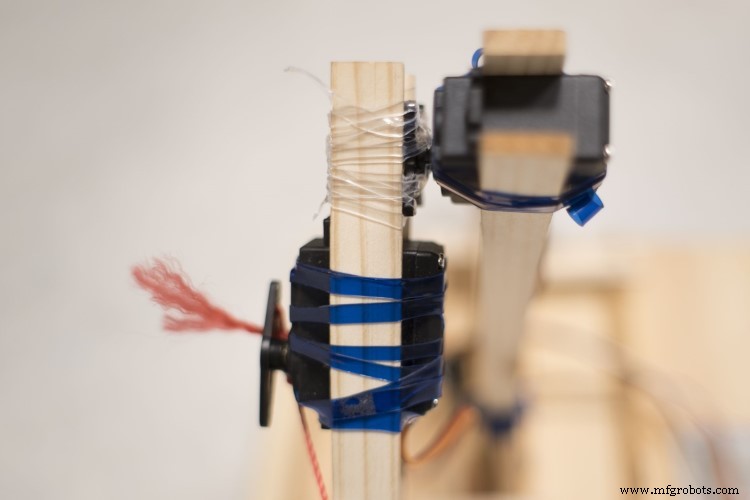
- Om de onderdelen aan elkaar te knopen hebben we krimpkousen gemaakt van plastic flessen. Het is een geweldige techniek die je kunt maken met plastic flessen die je in huis hebt. Speel wat rond en test deze een beetje, je zult verrast zijn hoe sterk ze zijn.
- De arm beweegt in 3 assen, daarom gaan we 3 servomotoren gebruiken. Hier is een goed artikel waarin wordt uitgelegd hoe u een servomotor voor uw project kiest. We gaan de Sparkfun Servo gebruiken - generieke metalen uitrusting.
Montage
De basis
Begin met bouwen met een stevige basis zodat de arm niet omvalt. Tegelijkertijd moeten we ook begrijpen wat de beste manier is om de stukken hout aan elkaar te binden en te binden zodat de basis stevig is.
In de afbeelding hieronder zie je hoe we de krimpkous hebben gebruikt en een aardappel (!) als basis als gewicht. Vergeet niet om het van tijd tot tijd te vervangen :)
Saldo
Het plaatsen van de tweede servo was wat lastiger en we vinden dat dit gebied nog wat aandacht behoeft. Na het bouwen van het prototype realiseerden we ons dat we niet genoeg aandacht hadden besteed aan het balanceren van de bovenarm. Daarom trekt de servomotor veel stroom - iets dat kan worden overwonnen door een contragewicht aan de andere kant van de arm te gebruiken.
De grijper
Er zijn verschillende soorten grijpers die we hebben overwogen, en we waren niet echt zeker wat we hier gingen doen. Uiteindelijk hebben we besloten om één kant van de grijper statisch te maken, zodat deze een sterke grip heeft. Zoals je in de onderstaande afbeelding kunt zien, hebben we voor het bewegende deel een verbinding gemaakt, die wordt bestuurd door de servo en een veer toegevoegd voor het sluiten en openen.
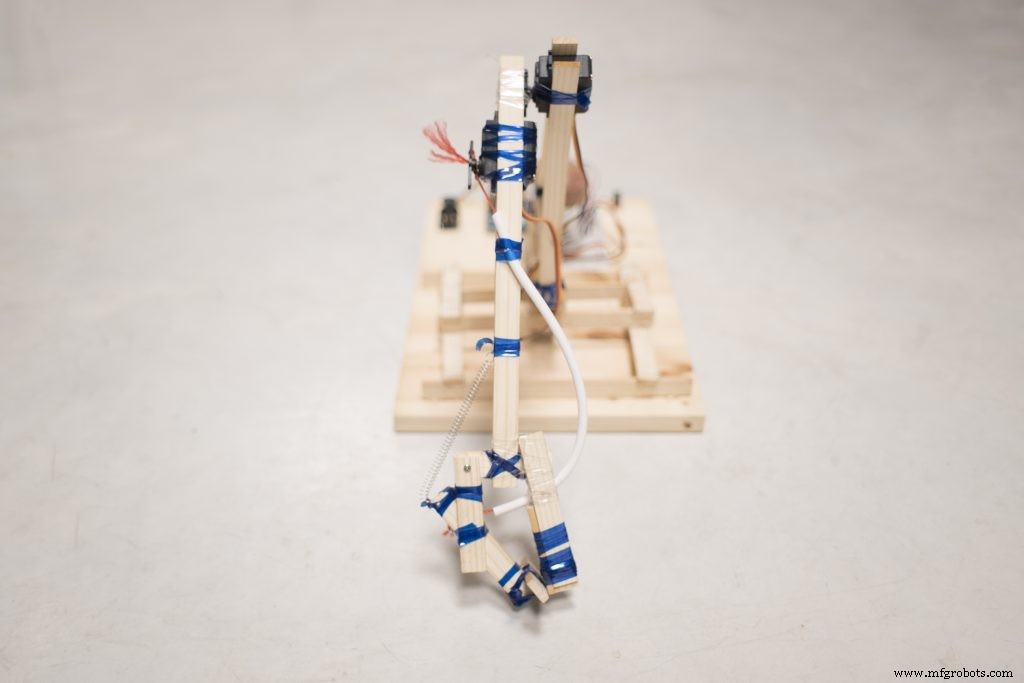
Uiteindelijk hebben we een touwtje in een elastische buis geplaatst om verbinding te maken tussen de servomotor en de grijper, hetzelfde mechanisme dat je kunt vinden in fietsremmen.
Dat is het eigenlijk! U zult waarschijnlijk kleine aanpassingen en wijzigingen in de code en mechanica moeten aanbrengen op basis van het materiaal en de elektronica die u gebruikt. Als je inzichten of opmerkingen hebt, horen we die graag! Deel ze met ons op ons forum of in de reacties hieronder
Code
Code robotarm
1. Vervang de firmware.ino-testcode van circuito.io door de firmware.ino-code in deze repository2. Laat de andere bibliotheken zoals ze zijn.3. Zorg ervoor dat u "Bibliotheken opnemen" en "Pindefinities"4 laat staan. Controleer of de pindefinities overeenkomenhttps://github.com/Circuito-io/Robotic-ArmProductieproces
- De open source 3D-geprinte robotarm van Haddington Dynamics
- Dual Arm SCARA-robot
- Verschillen tussen robotmanipulator en robotarm
- MeArm Robotarm - Uw robot - V1.0
- Arduino 3D-geprinte robotarm
- Nunchuk-gestuurde robotarm (met Arduino)
- Robotarm bestuurd via Ethernet
- Geautomatiseerde robotarm voor solderen
- PC-gestuurde robotarm
- GXO test aangepaste robotarm voor e-commerce logistiek in de mode
- De industriële robotarm - een productieboom