


Automatische handdesinfectie
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 19 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Benodigde gereedschappen en machines
 |
| |||
 |
| |||
|
Apps en online services
 |
| |||
| ||||
|
Over dit project
De afgelopen maanden heeft de COVID-19-pandemie over de hele wereld chaos verspreid. Er zijn talloze besmettingen en helaas veel slachtoffers. Een van de belangrijkste maatregelen die door de Wereldgezondheidsorganisatie worden voorgesteld, is het constant wassen van de handen met zeep of handdesinfectiemiddelen. Maar een van de belangrijkste problemen is de manier waarop we het doen en dat is door de dispenser fysiek aan te raken, waardoor het hele doel van de actie wordt geëlimineerd en zelfs een groot risico op infectie ontstaat. Dus ik , een 14-jarige jongen , besloot iets te maken met een Arduino Nano-bord dat dit probleem zou kunnen bestrijden, maar ik wilde ook dat het goedkoop was en dat het gemakkelijk, snel en effectief op veel verschillende dispensers kon worden bevestigd! En dit is precies wat ik heb gemaakt, een accessoire dat kan worden bevestigd aan de meeste handdesinfecterende/zeepdispensers en draai ze volledig handsfree en automatisch
Bekijk eerst deze video om het apparaat in actie te zien en ook om te begrijpen hoe het werkt en hoe het gemaakt is!
Stap 1:Begrijp het mechanisme


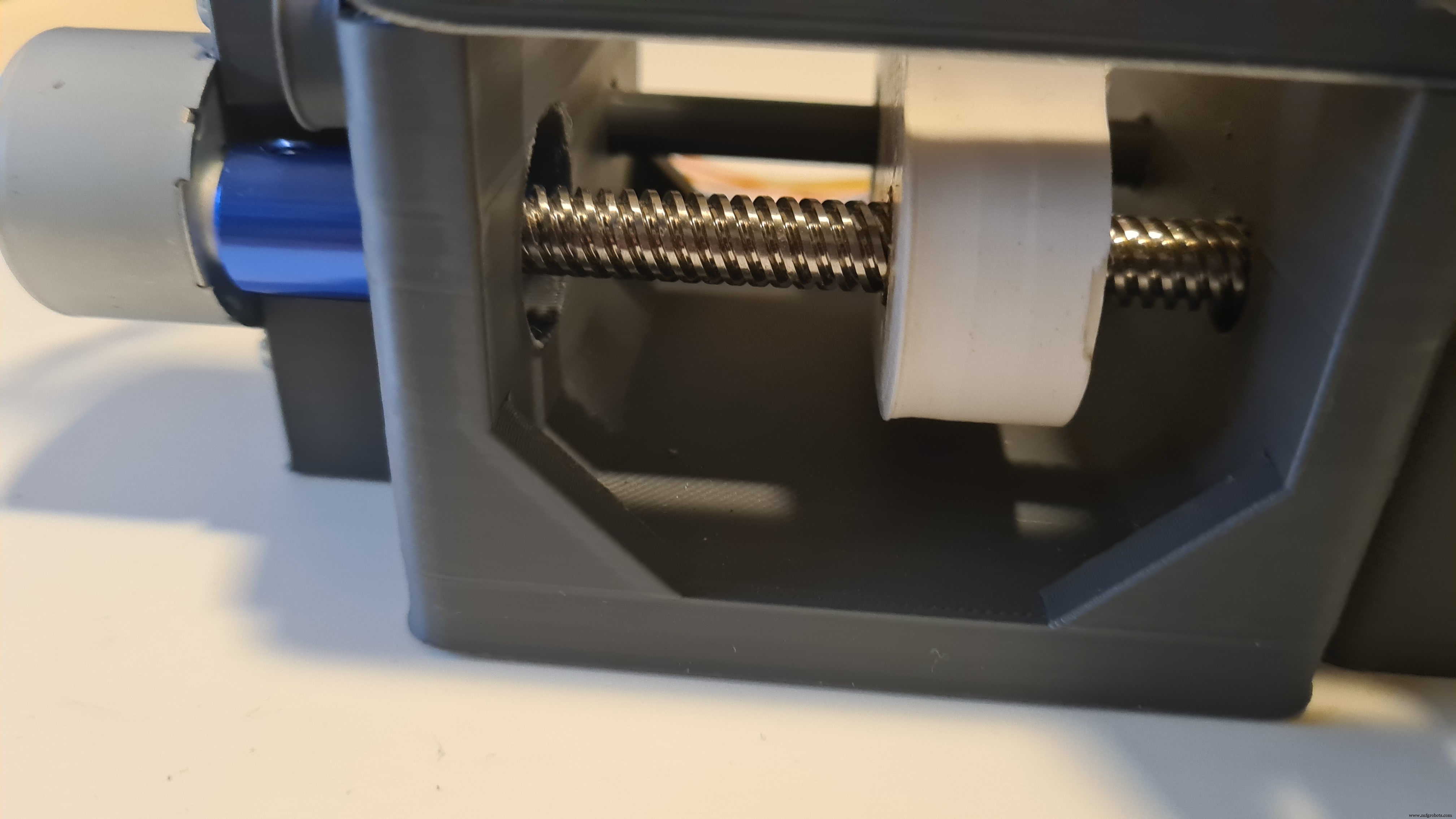
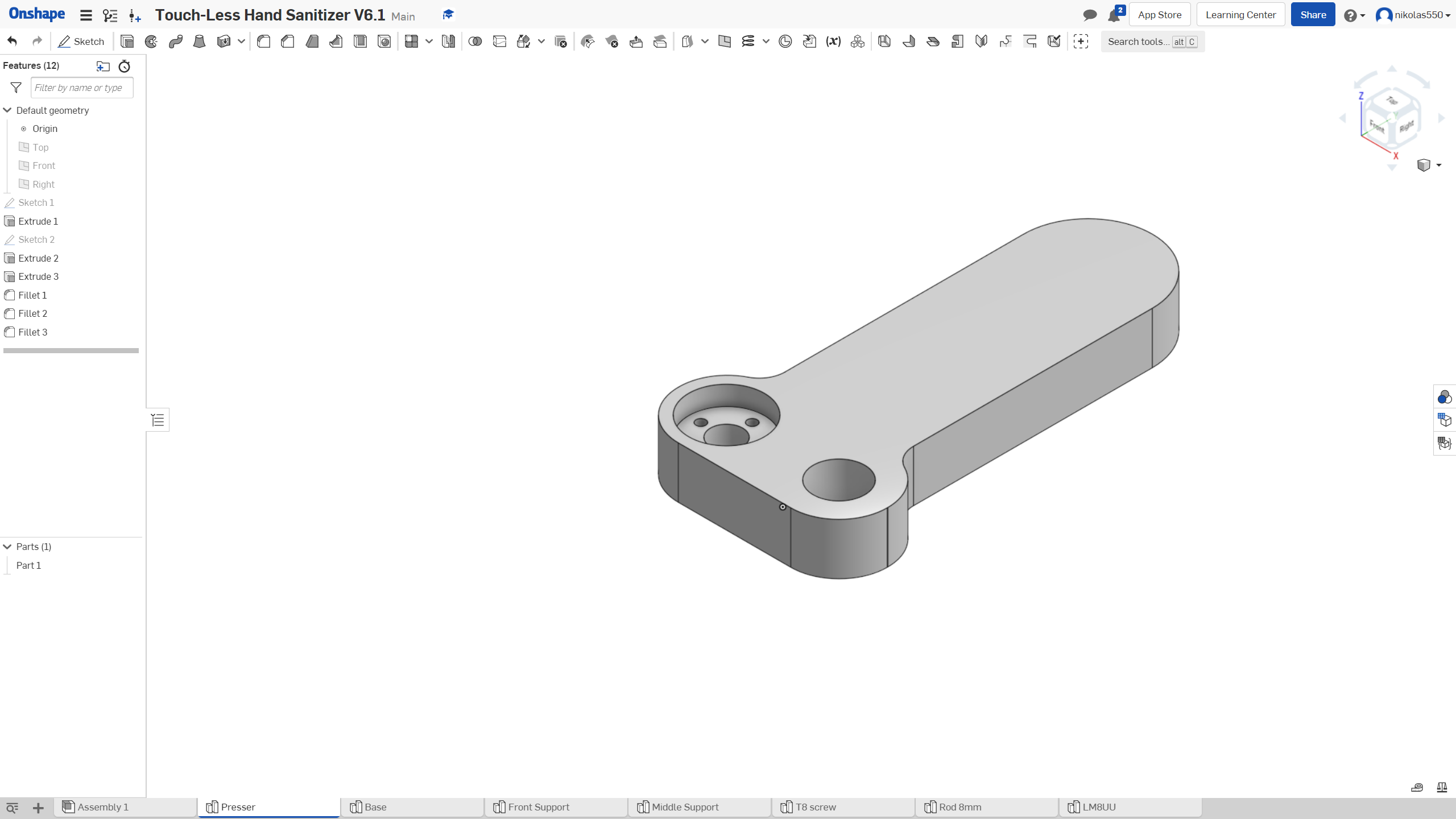
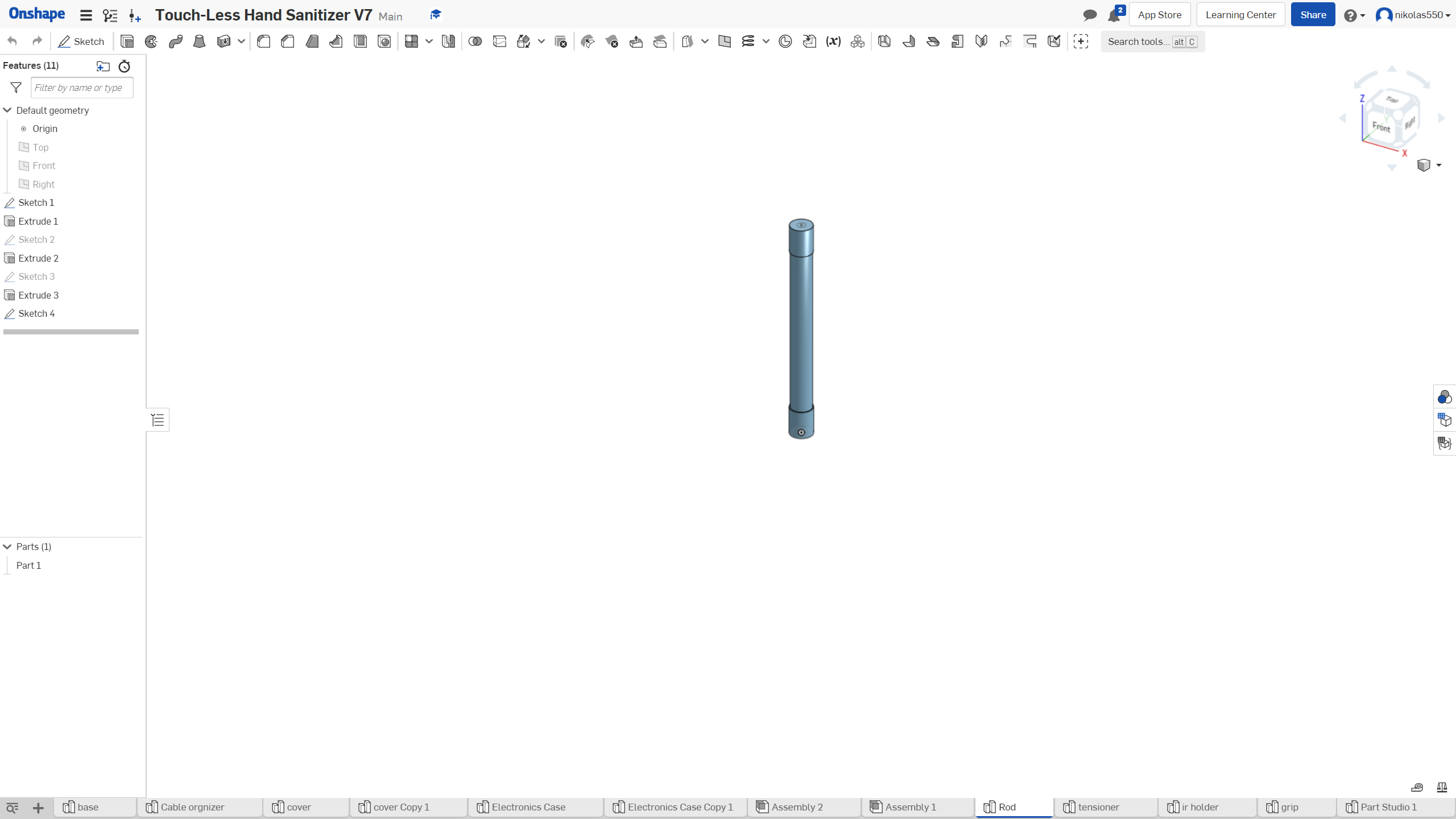
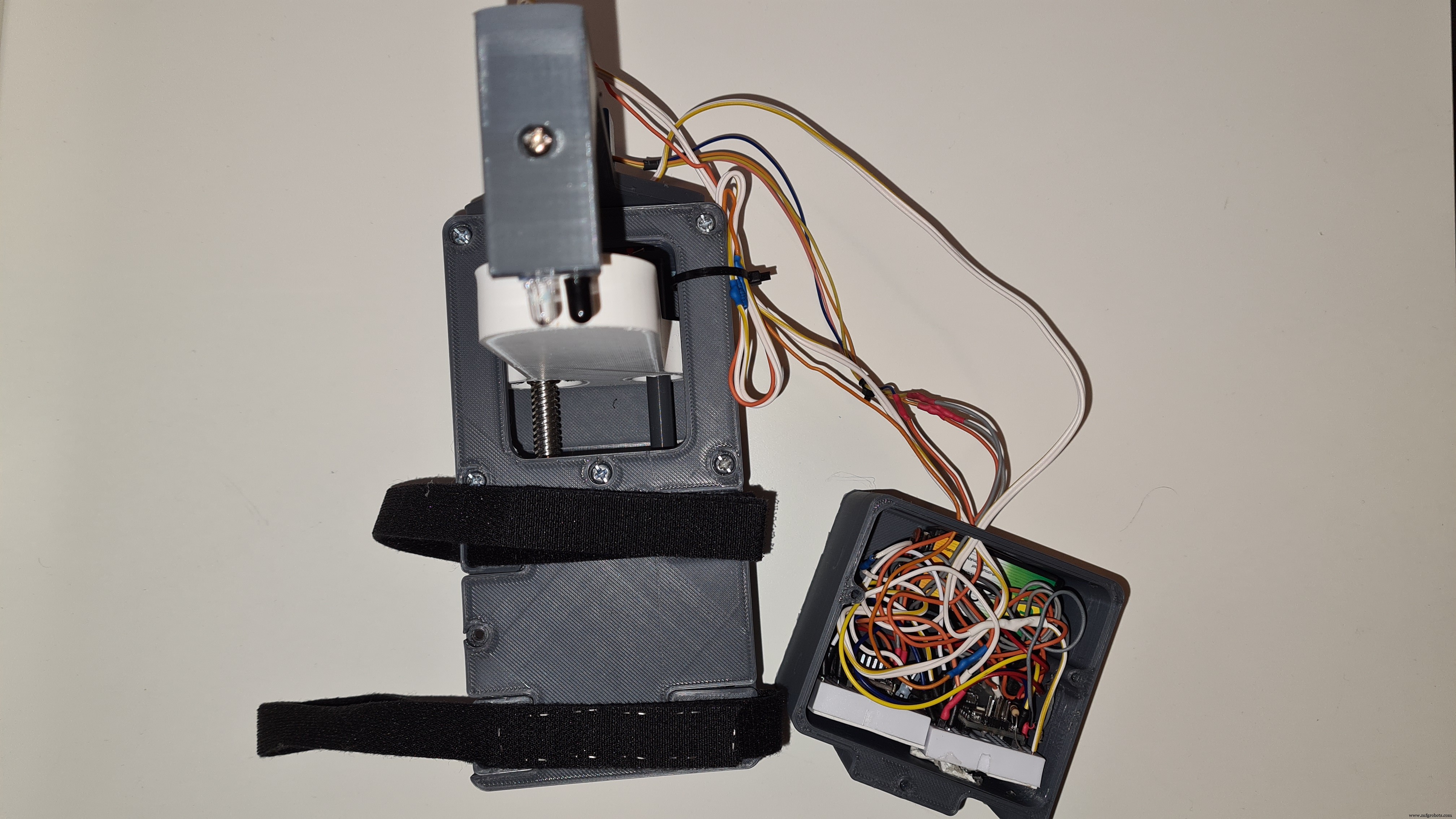
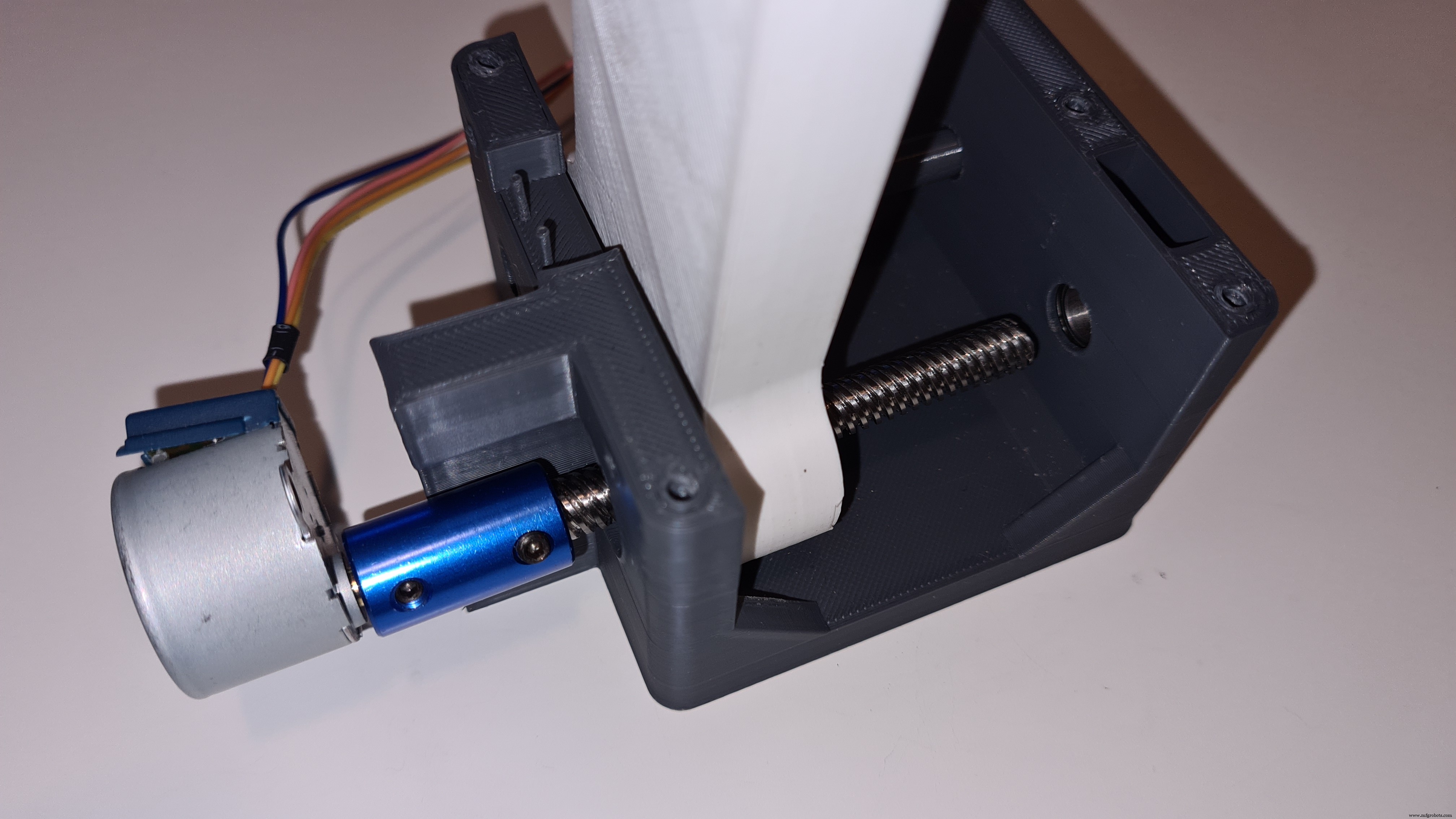
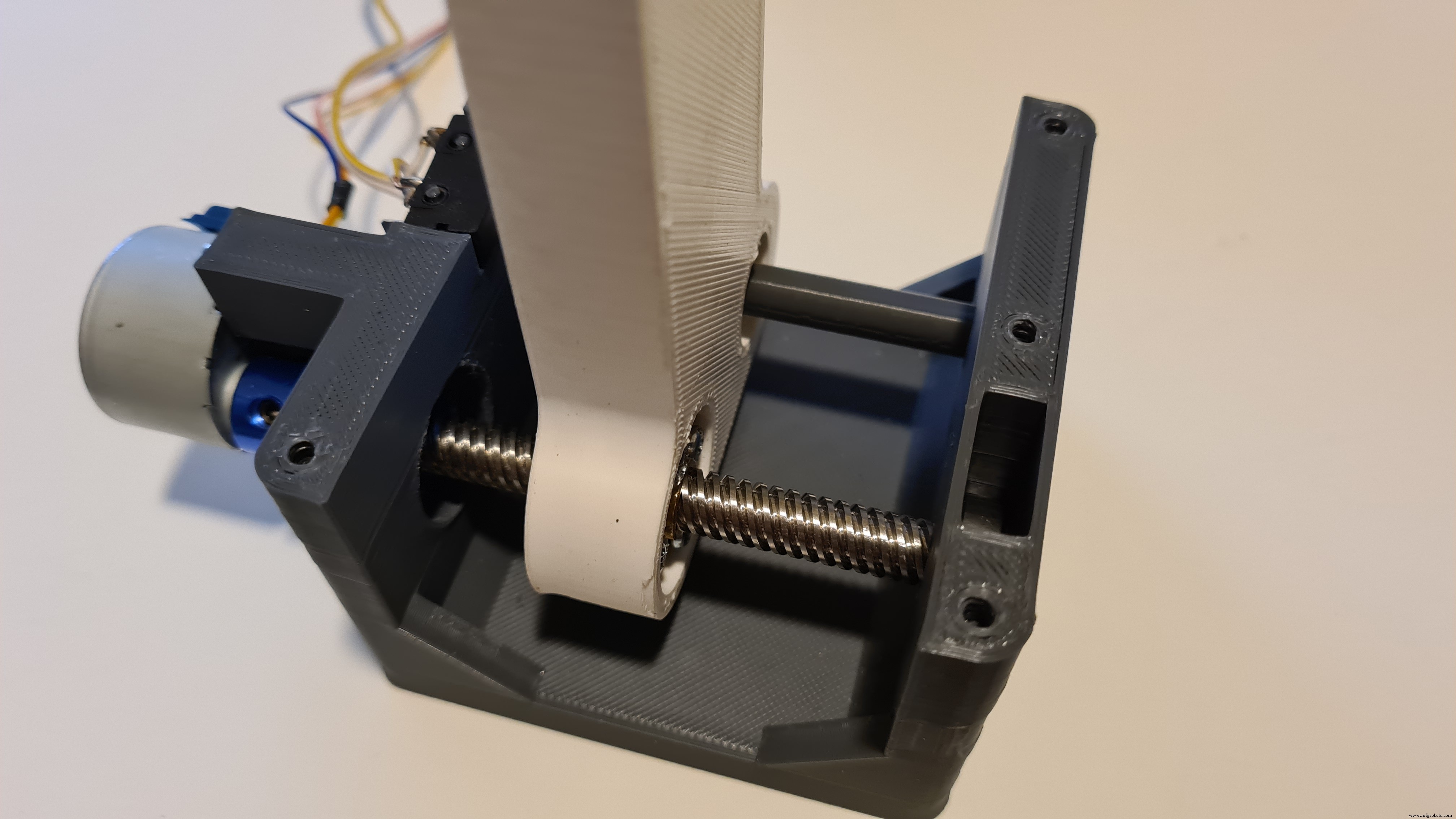
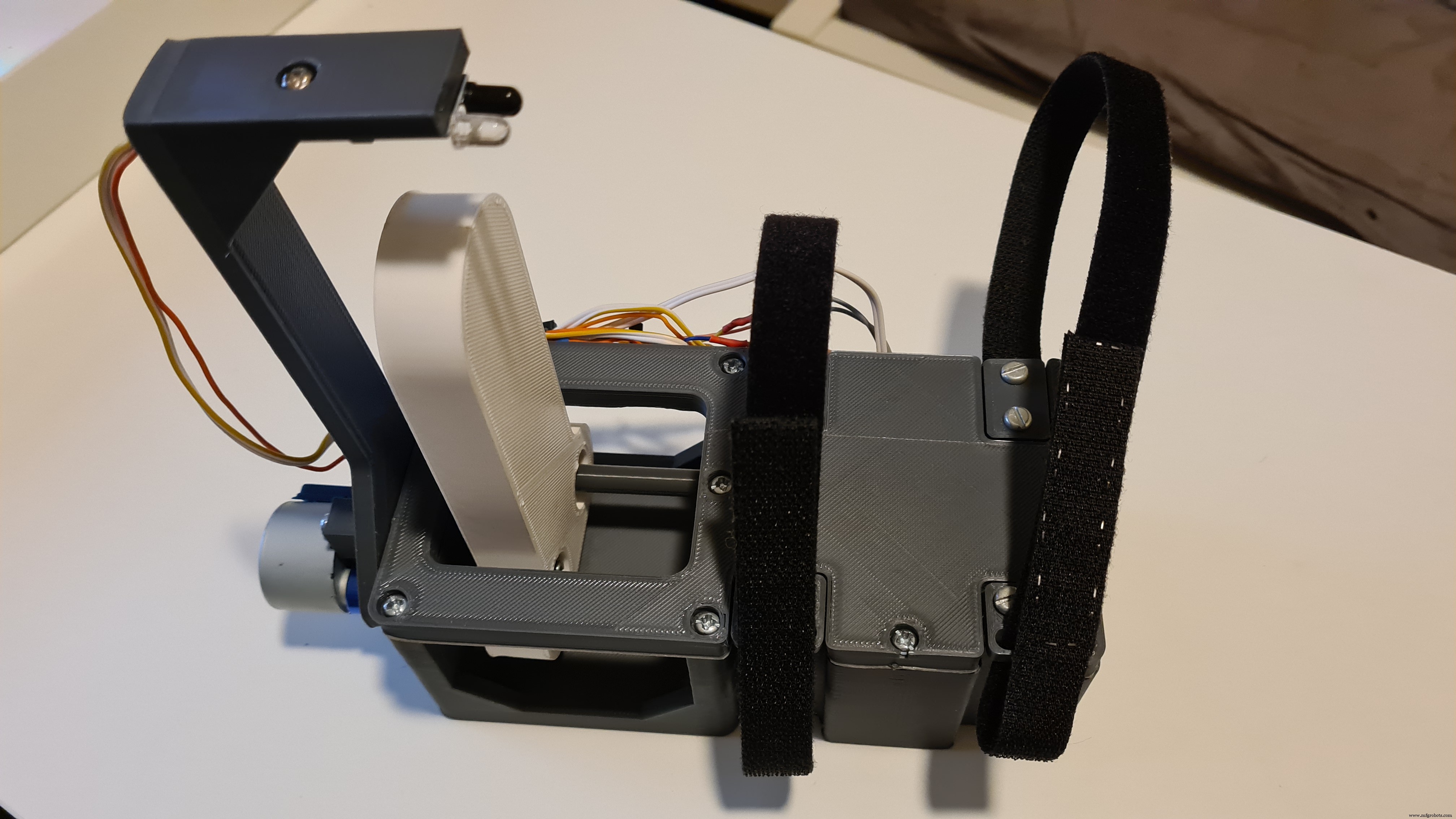
Dus eigenlijk is een stappenmotor verbonden met een koppeling met een schroef. Vervolgens wordt de 3D-geprinte pers aan de ene kant met de schroef verbonden met een moer en aan de andere kant ondersteund door een 3D-geprinte staaf. De stang laat de rotatiekracht van de schroef niet toe om de pers te draaien en in plaats daarvan beweegt de pers lineair . Op deze manier kunnen we de stepper opdracht geven om in elke richting (heen en weer) te bewegen, met elke snelheid en met zoveel stappen als we willen.
Stap 2:Begrijp hoe het apparaat werkt


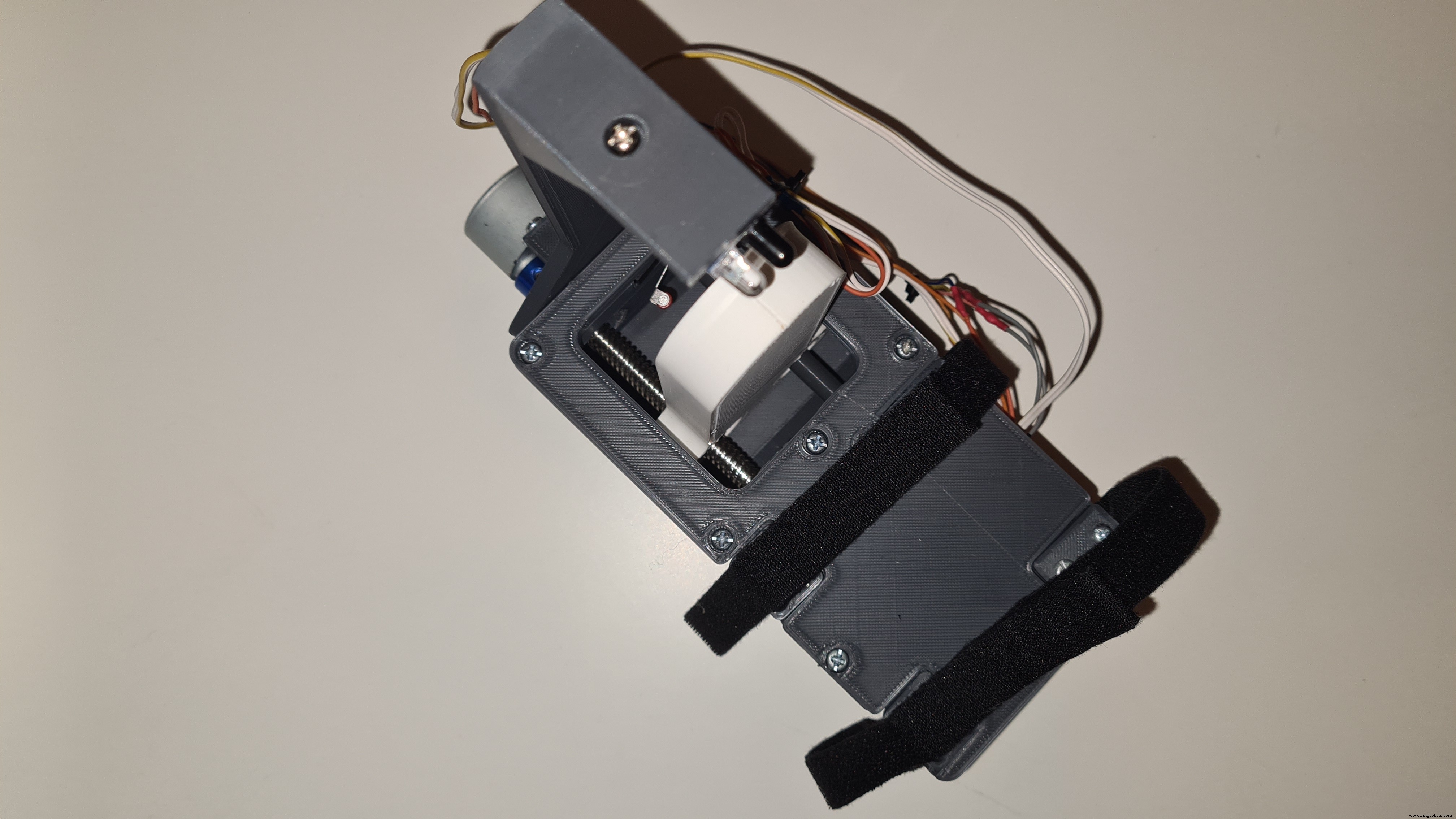
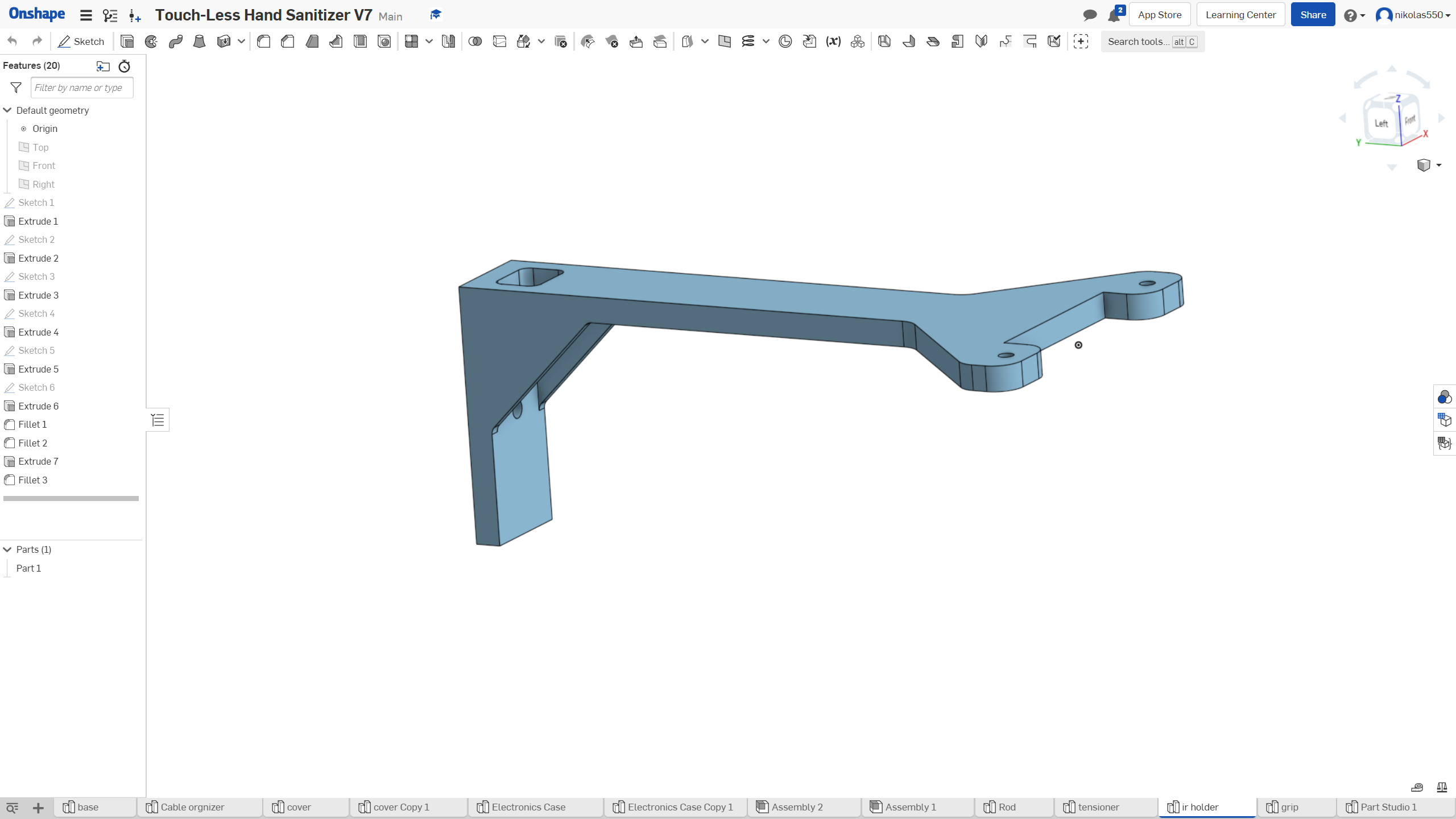
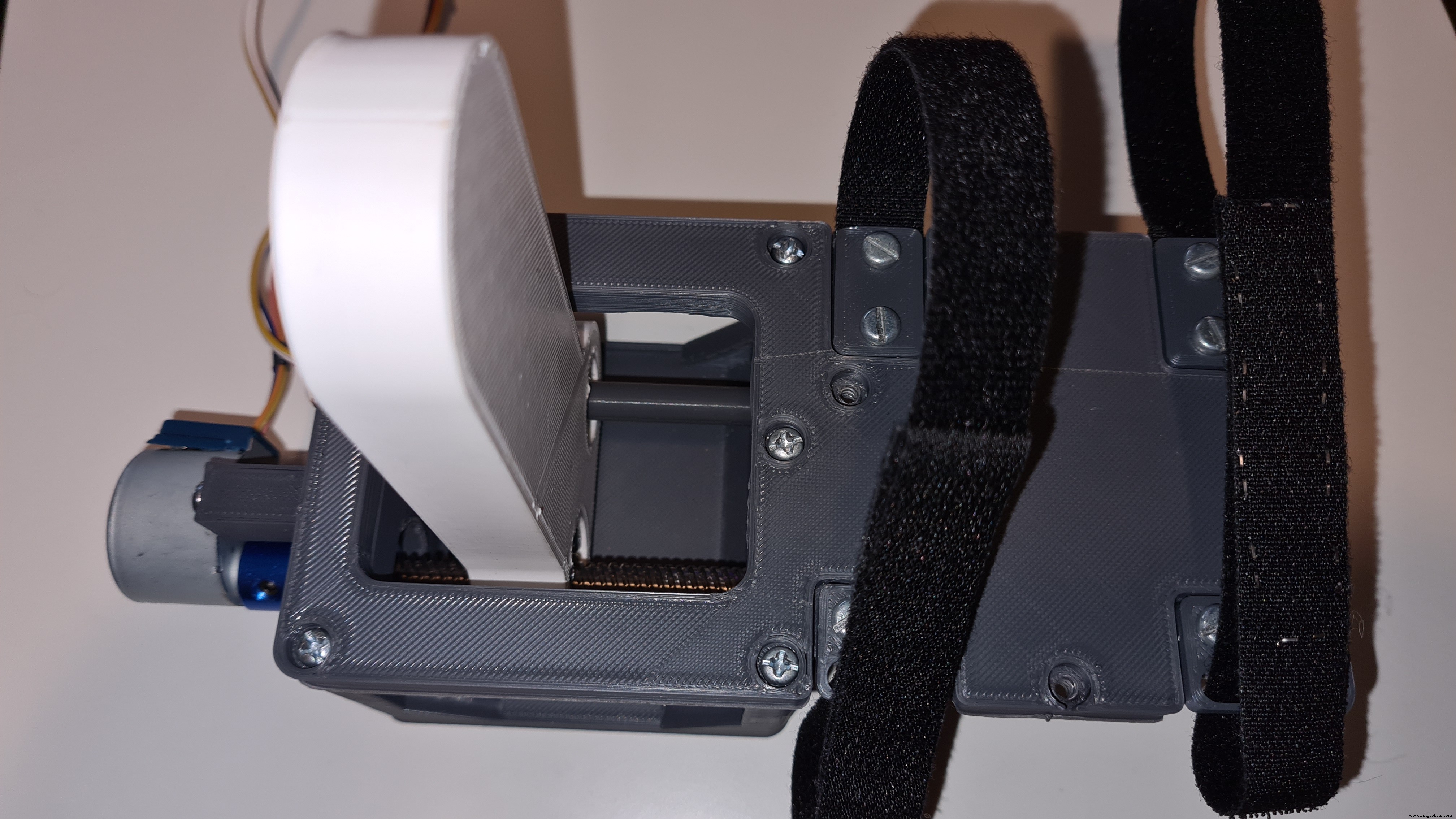
Het concept is dat wanneer de IR-obstakelsensor, die aan de 3D-geprinte IR-houder is bevestigd, wordt geactiveerd, door simpelweg uw hand een paar centimeter eronder te houden, de pers een ingestelde afstand naar beneden gaat (door op de dispenser te drukken) wacht 2 seconden en keert dan terug naar de beginpositie door simpelweg omhoog te gaan totdat de eindstopschakelaar wordt geactiveerd. Evenzo, wanneer het apparaat voor het eerst wordt ingeschakeld, gaat de pers omhoog totdat de schakelaar wordt geactiveerd en stopt hij daar, als een soort zelfkalibratie, zodat de pers klaar is voor gebruik.


Vervolgens wikkel je met de klittenband de Hand-Sanitizer van je keuze en trek je deze zo strak mogelijk aan.
Nu is de automatische dispenser voor handdesinfectie functioneel!!
Stap 3:Verzamel de benodigde componenten
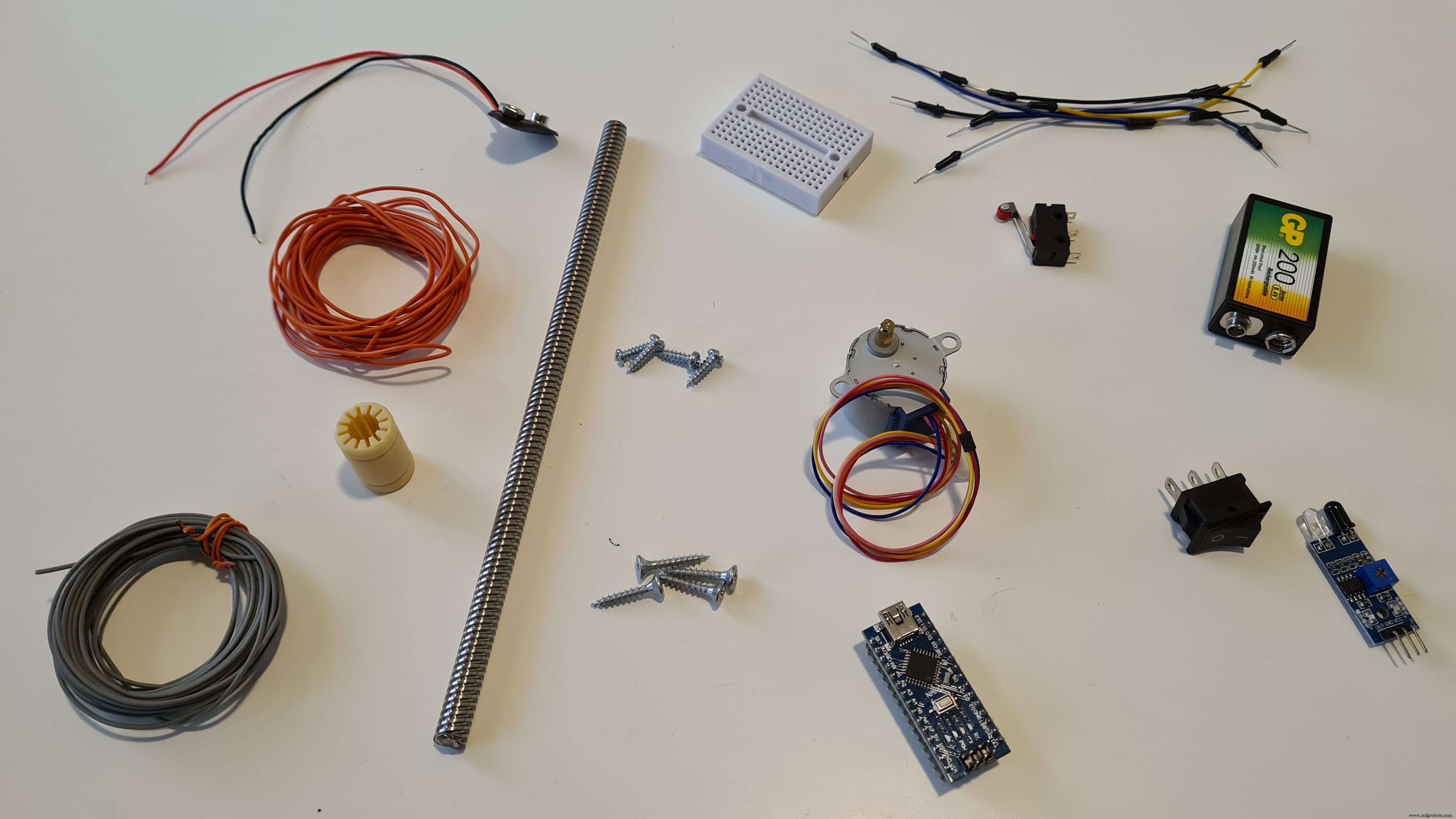
Alle links van de benodigde componenten bevinden zich in de sectie "Dingen".
Stap 4:Ontwerp aangepaste onderdelen
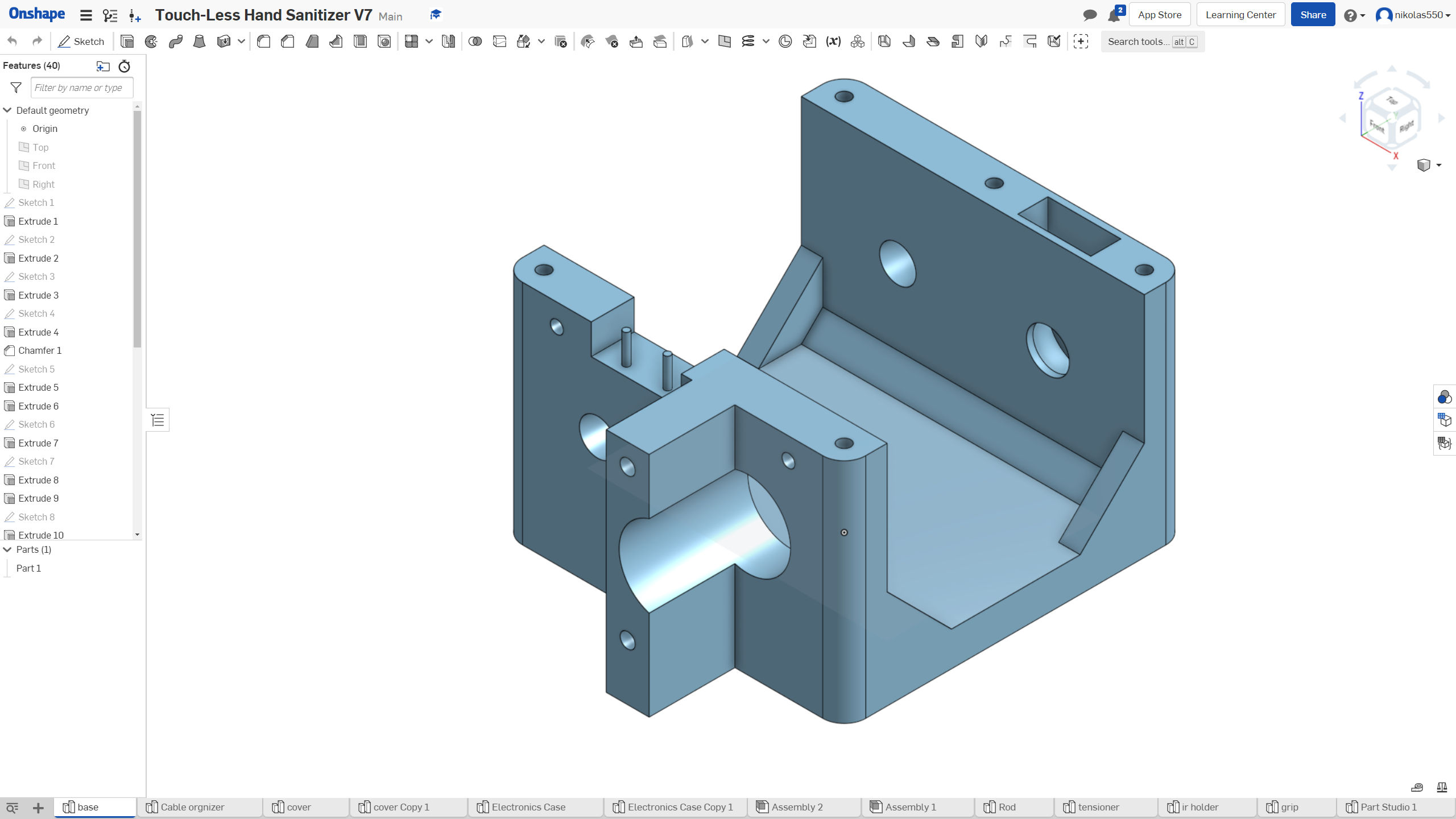
Alle 3D-geprinte onderdelen zijn door mij ontworpen op Onshape, maar u hoeft zich geen zorgen te maken over 3D-ontwerpen omdat ik alle.stl-bestanden heb verstrekt in de sectie "Bijlagen".
Stap 5:3D-printen van aangepaste plastic onderdelen




Ik heb de onderdelen 3D geprint op mijn Creality3D Ender 3 V2 in grijs en wit PLA met een laaghoogte van 0,2 mm en een vulling van 20%. Als je geen toegang hebt tot een 3D-printer, kun je proberen karton of hout te gebruiken.
Stap 6:De stepper aanpassen

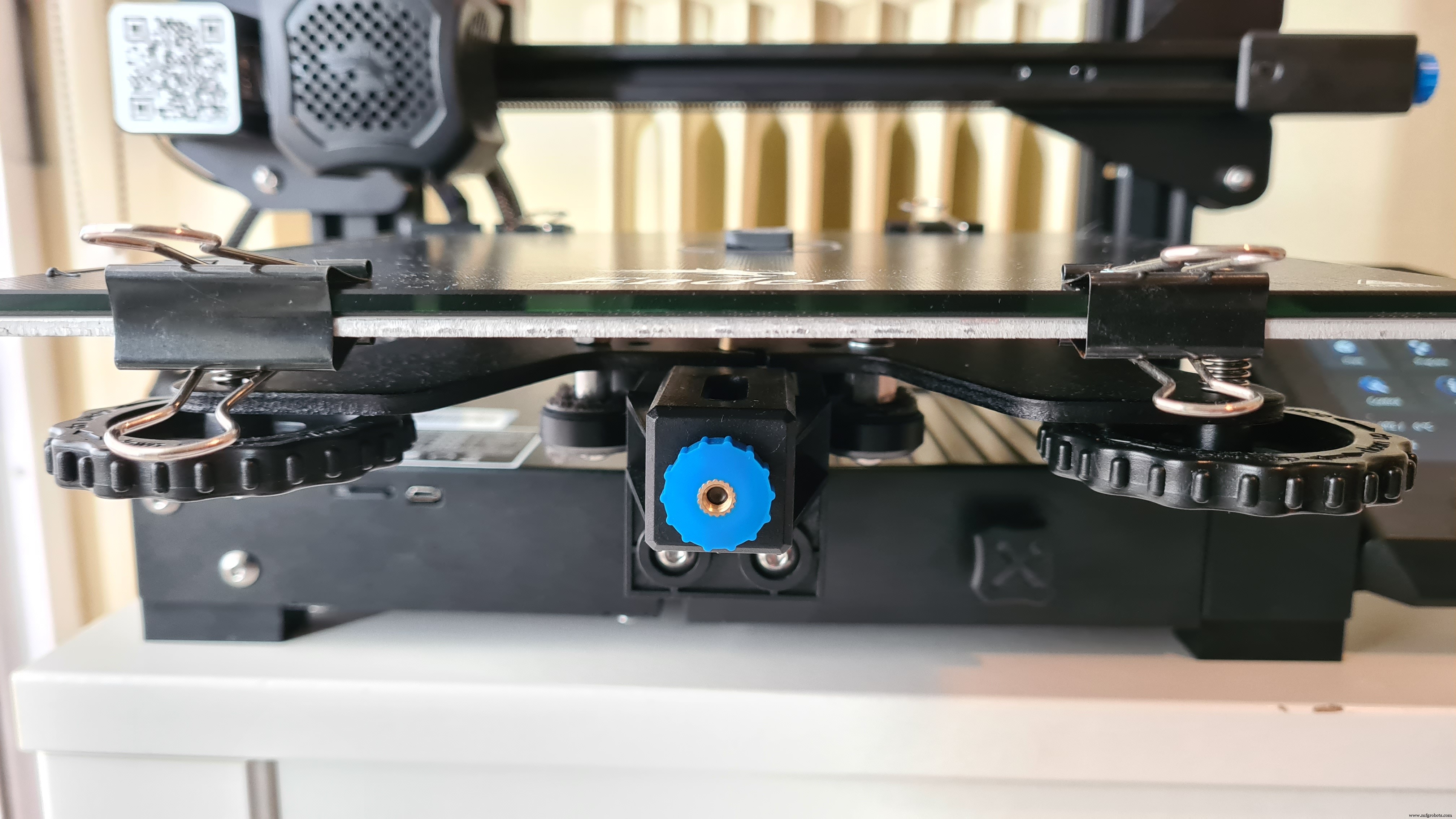
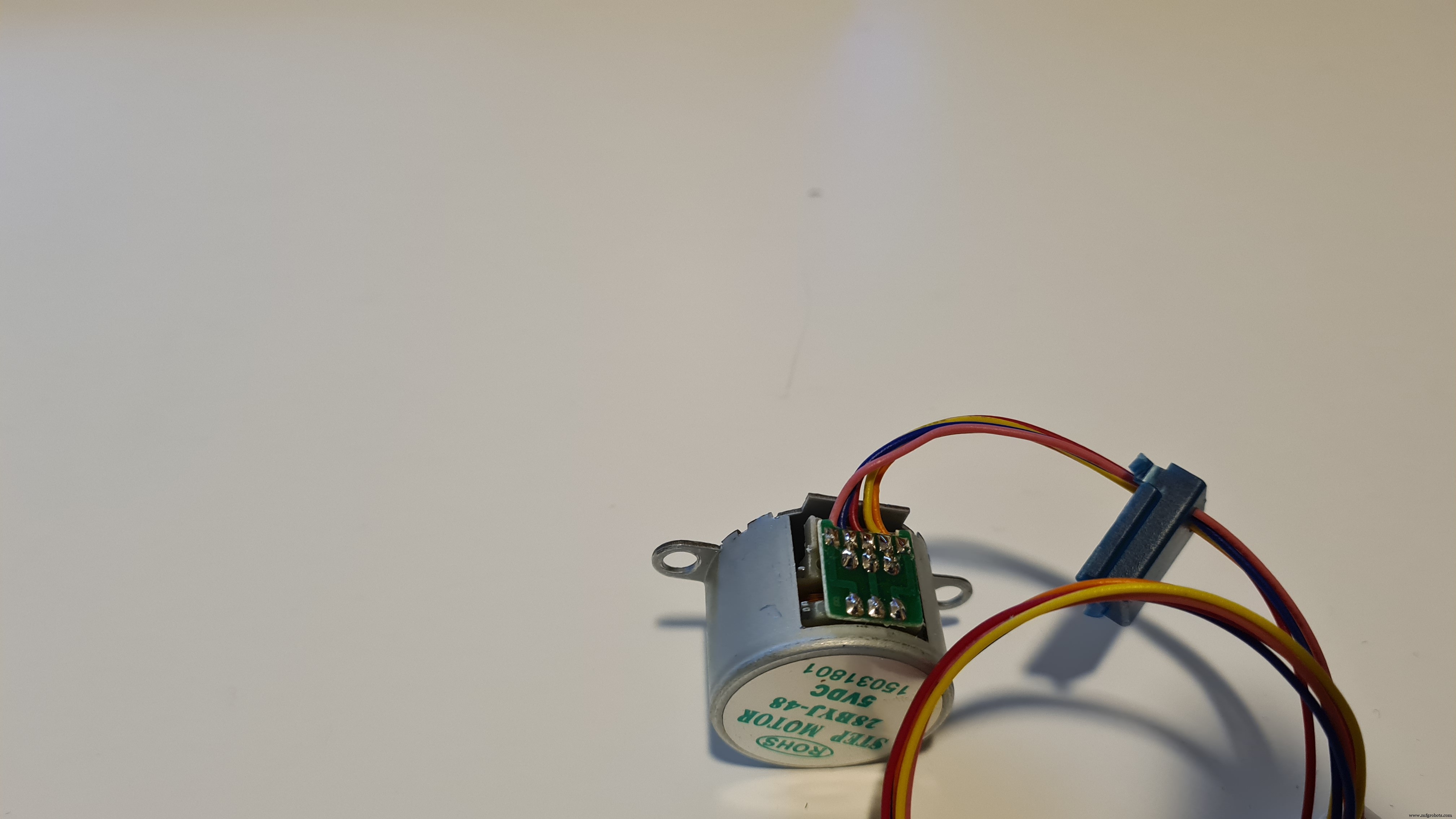
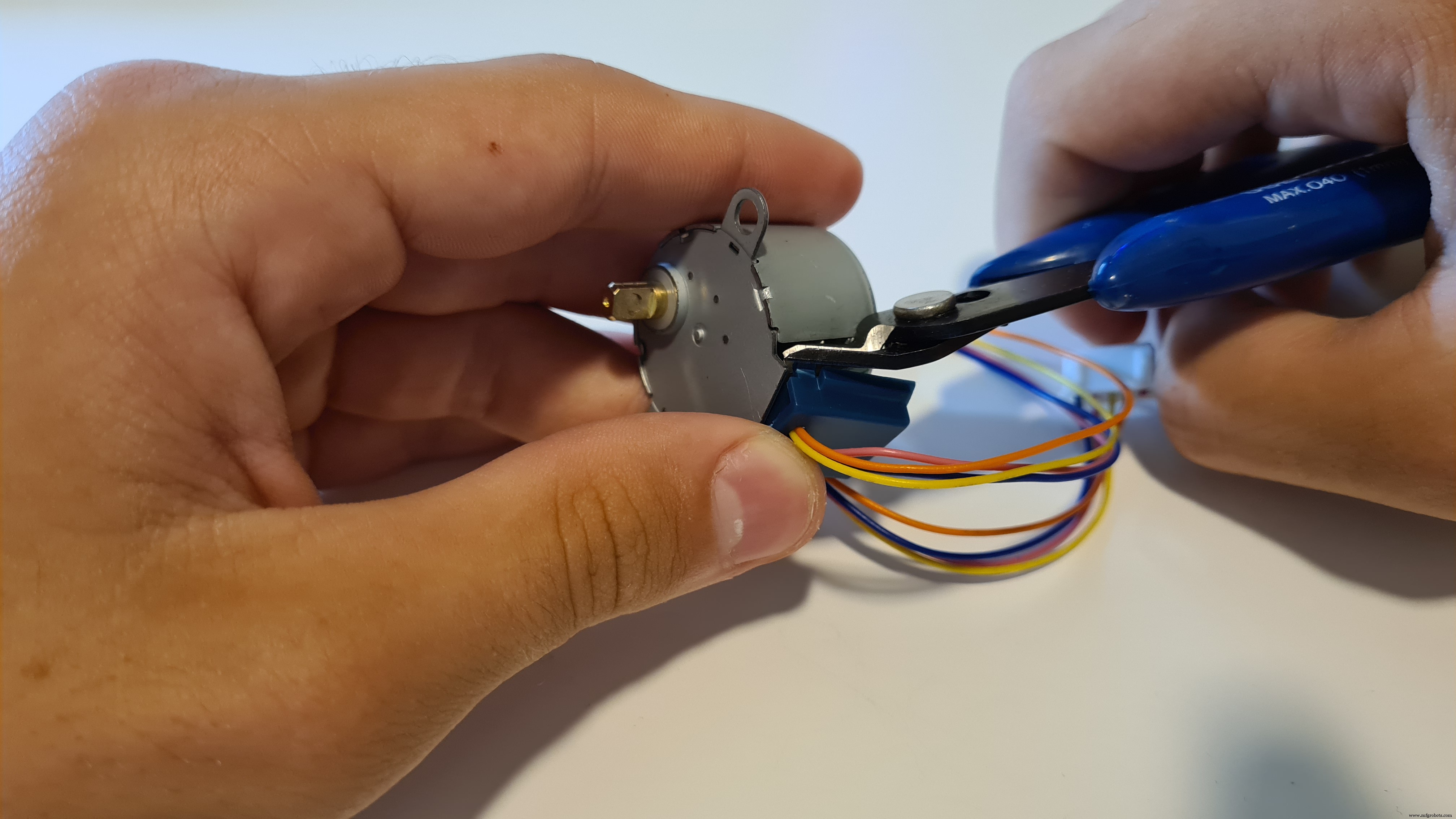
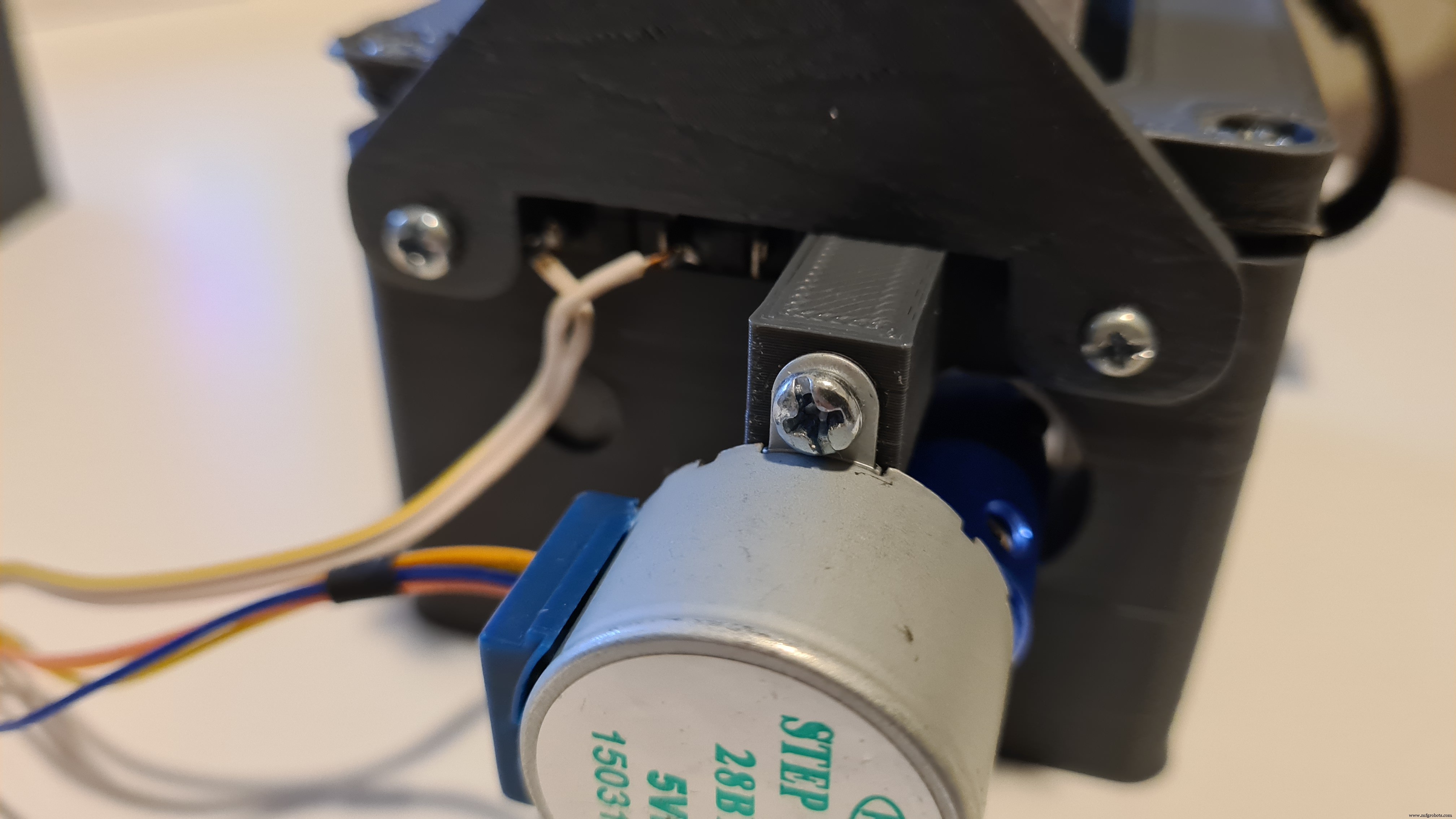
De 28BYJ-48 stappenmotor is een kleine en echt goedkope stappenmotor. Het is een unipolaire stappenmotor en heeft een koppel van ongeveer 300 g/cm wat werkt met ons project, maar ik wil dat het sterker is voor betere resultaten. We kunnen het koppel verhogen tot 800+ g/cm door conversie het naar een bipolaire motor met een eenvoudige en gemakkelijke mod!
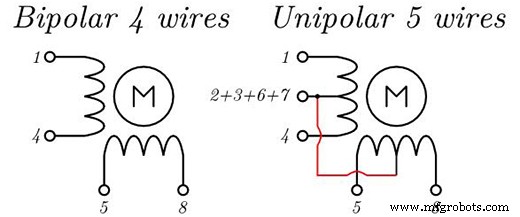
Bipolaire steppers hebben grotere spoelen en als resultaat veel meer koppel .

Eerst wil je het blauwe deksel verwijderen met een schroevendraaier.
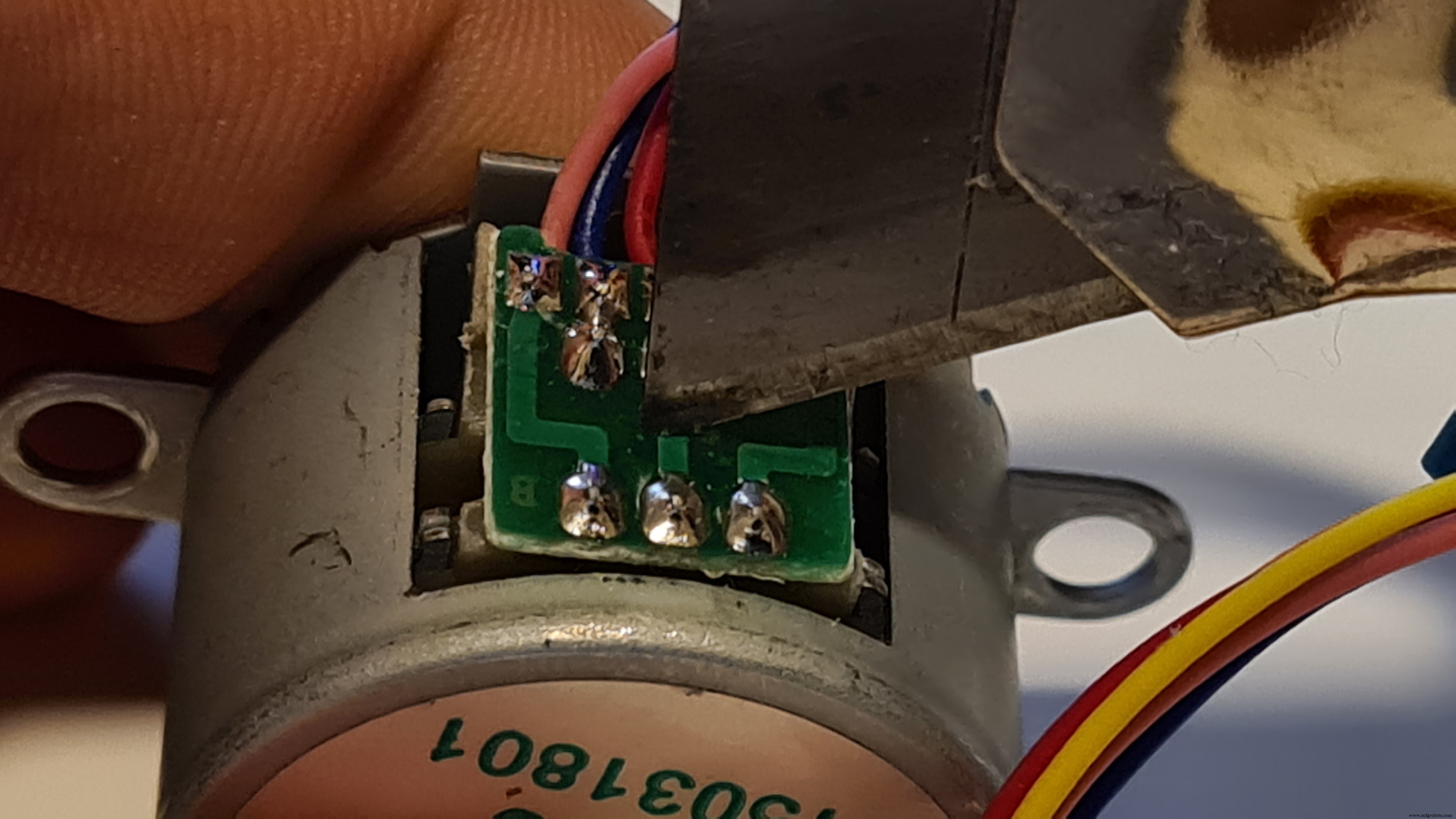
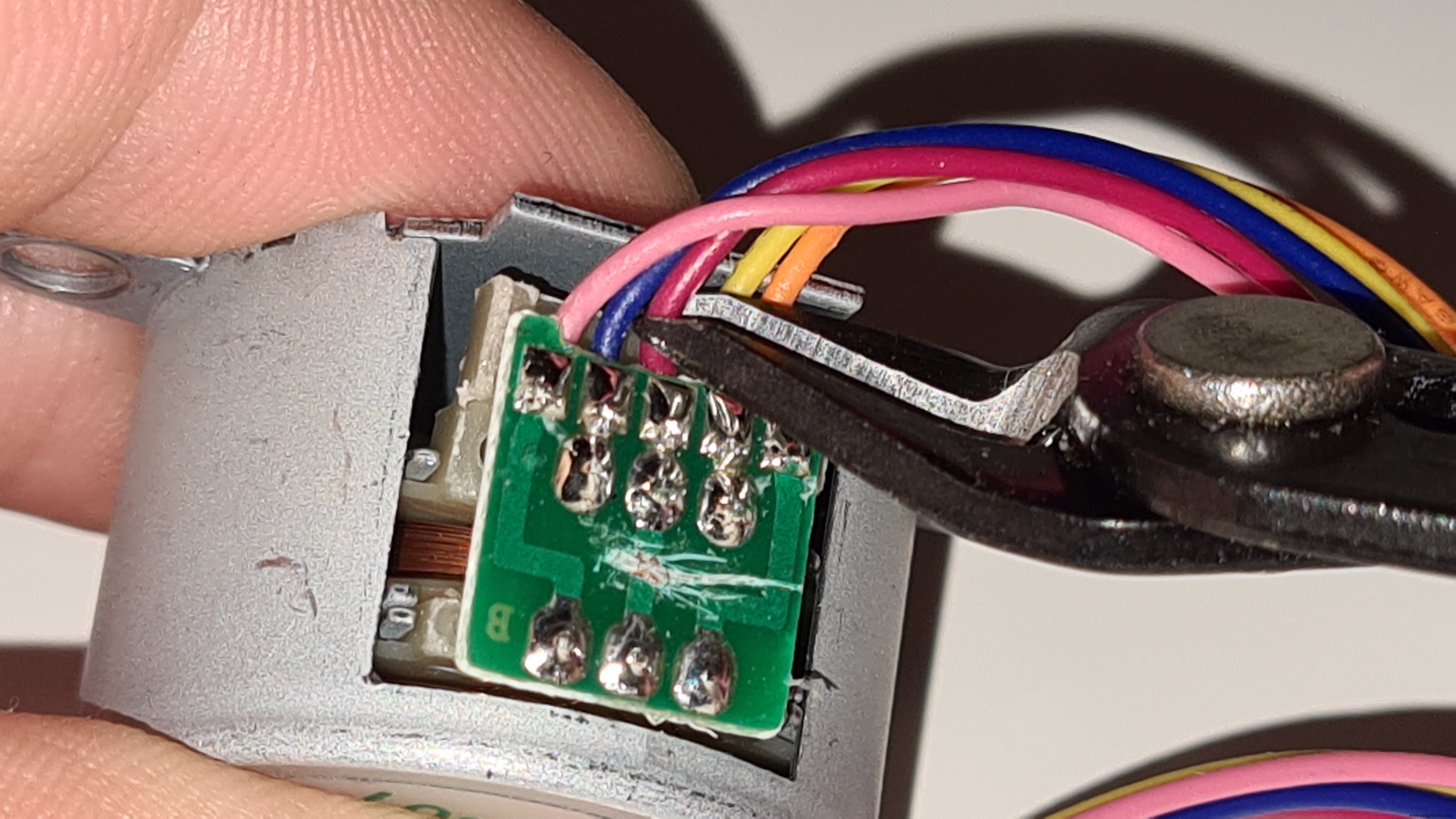
Eenmaal verwijderd, wil je het middelste spoor dat naar de rode draad gaat volledig afsnijden met een mes.
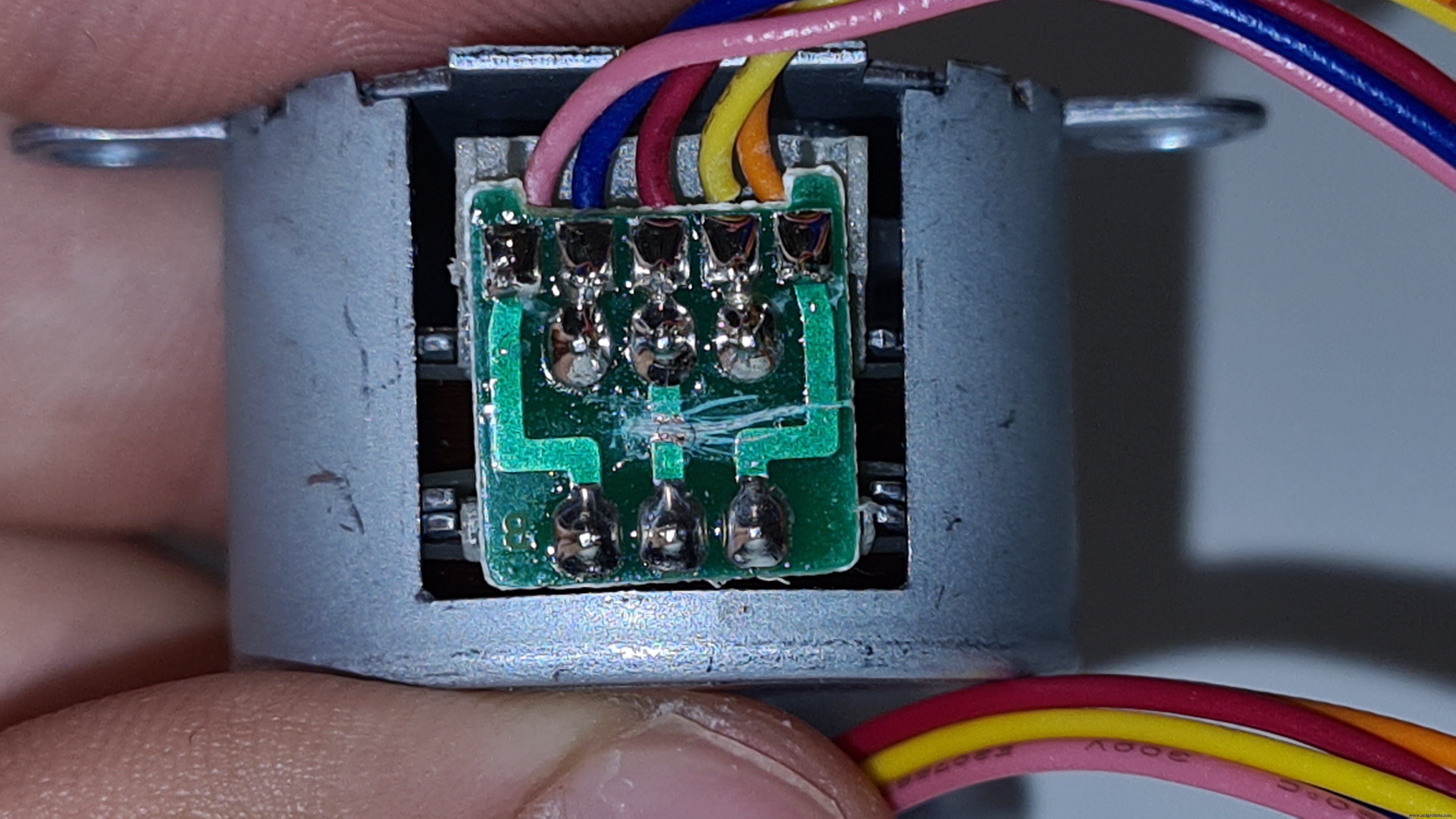
U wilt er zeker van zijn dat dit niet . doet helemaal geen verbinding meer maken.
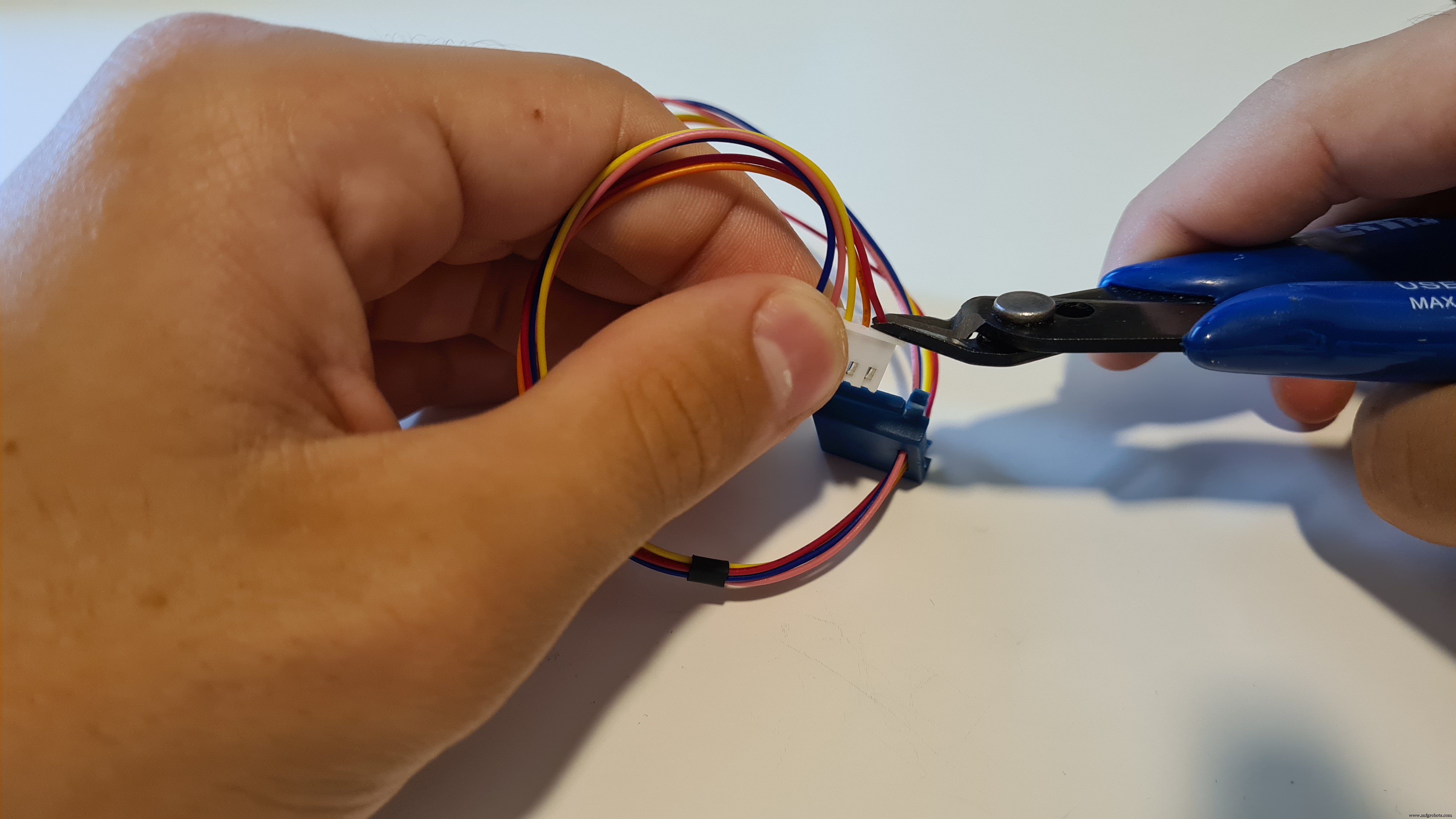
Nu kun je de rode draad van beide kanten afknippen.
U kunt nu de blauwe afdekking weer aanbrengen. Ik moest 2 van zijn steunen afsnijden om hem terug te kunnen plaatsen.
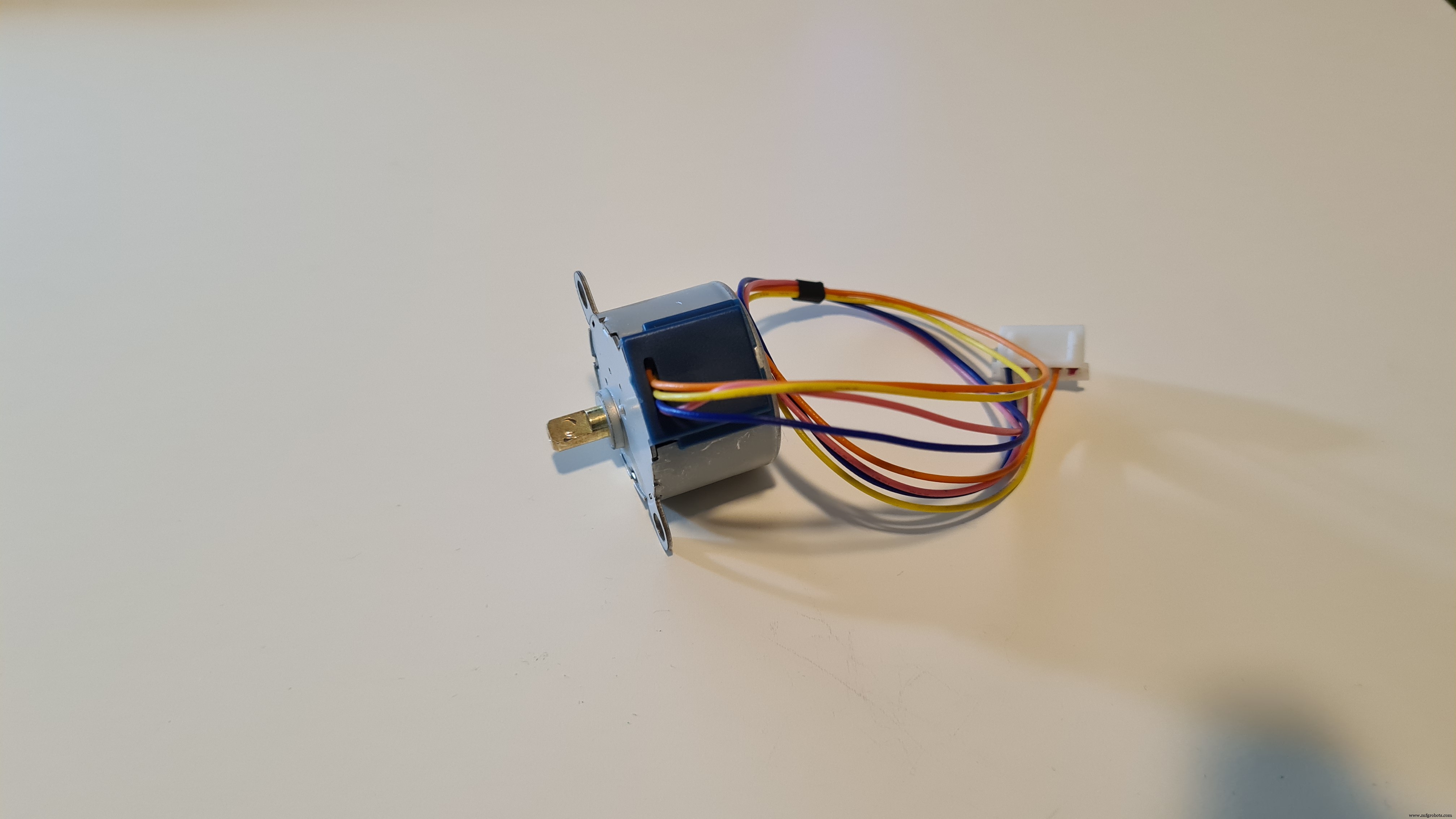
Nu heb je je eigen bipolaire 28BYJ-48 stepper. Het heeft ongeveer 2,5 keer het initiële koppel. Maar nu moet je een bipolaire stepper driver krijgen, zoals de DRV8825 die ik gebruik. De minimale voedingsspanning voor de bestuurder heeft een vermogen van 8,4 V en onze motor heeft een vermogen van 5 V. Maar maak je geen zorgen, de bipolaire versie van de motor kan die spanning gemakkelijk aan!
Stap 7:doe-het-zelf klittenband x2

Het is tijd om de klittenbandsluitingen te maken waarmee het accessoire aan de dispenser wordt bevestigd. Als je al kabelbinders met klittenband hebt, gebruik ze dan gerust.

Je kunt ze zo lang of zo kort maken als je wilt, maar ik raad aan om het ene deel af te knippen op 30cm - 40cm en het andere op 4cm - 7cm.

Nu wil je de twee delen aan elkaar nieten. Zorg ervoor dat de zijkanten die aan elkaar worden geniet, zowel ruw als beide zacht zijn.
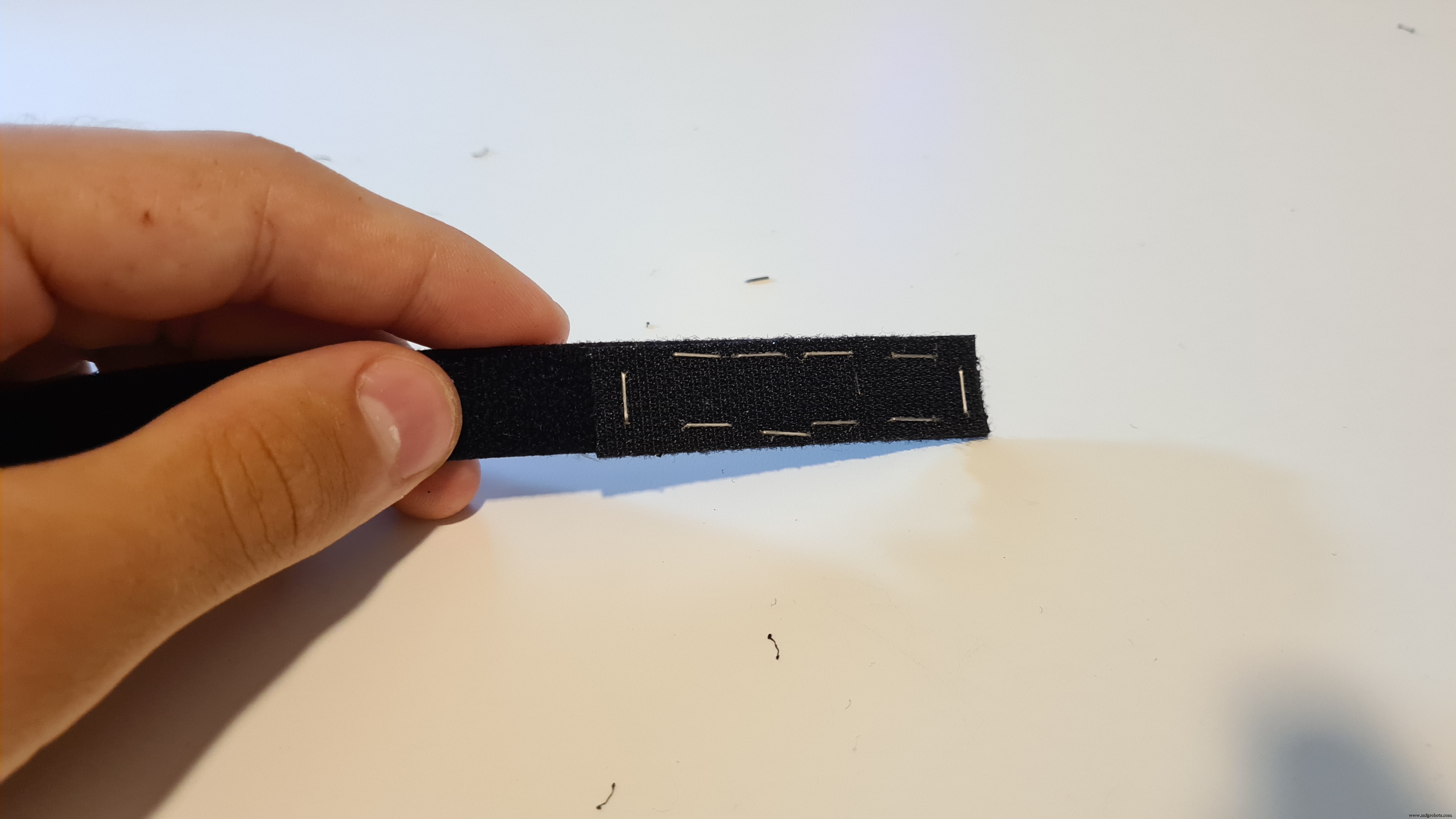
Nu is je klittenbandsluiting klaar voor gebruik!


Je hebt er twee nodig.
Stap 8:Circuit
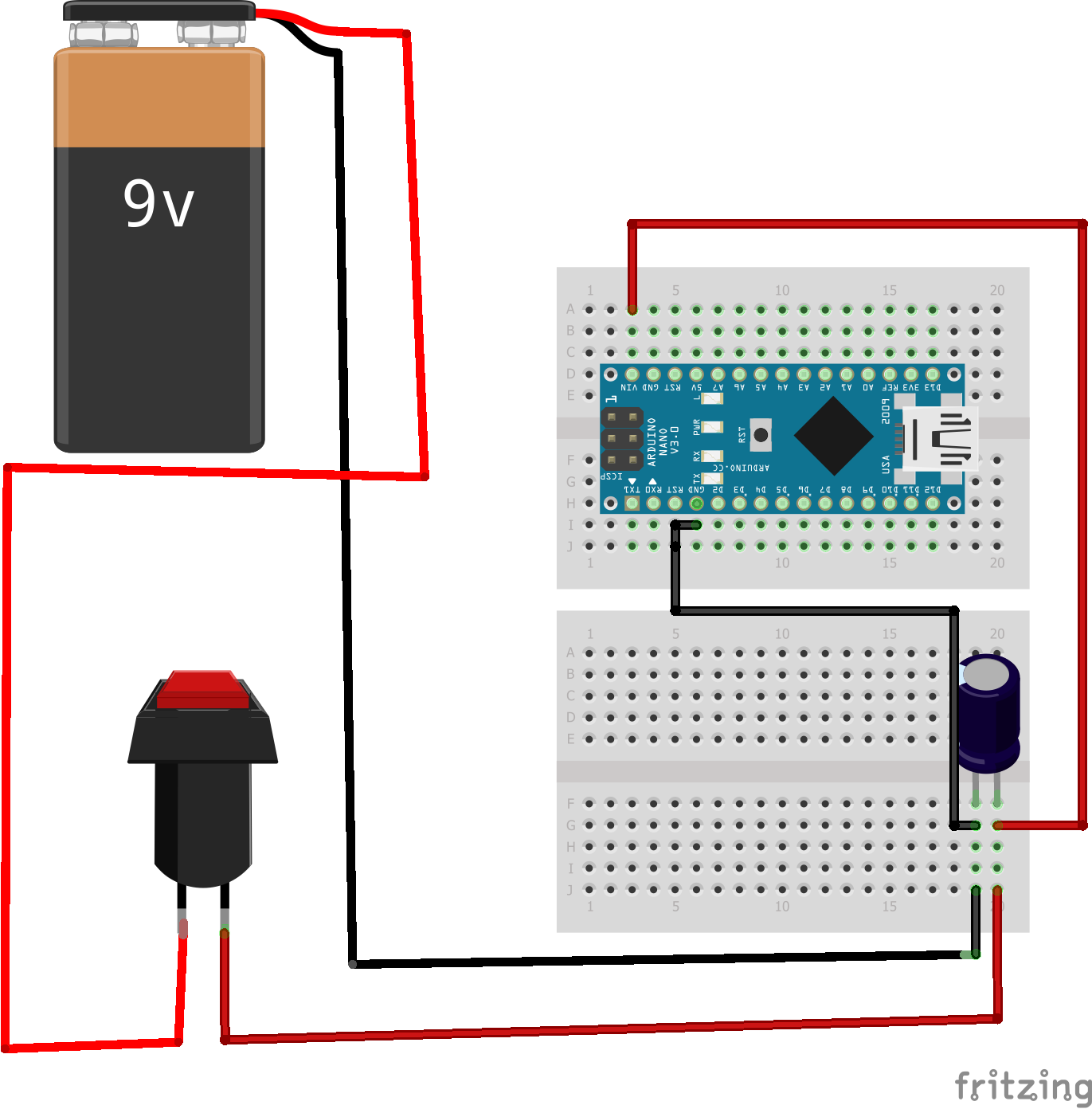
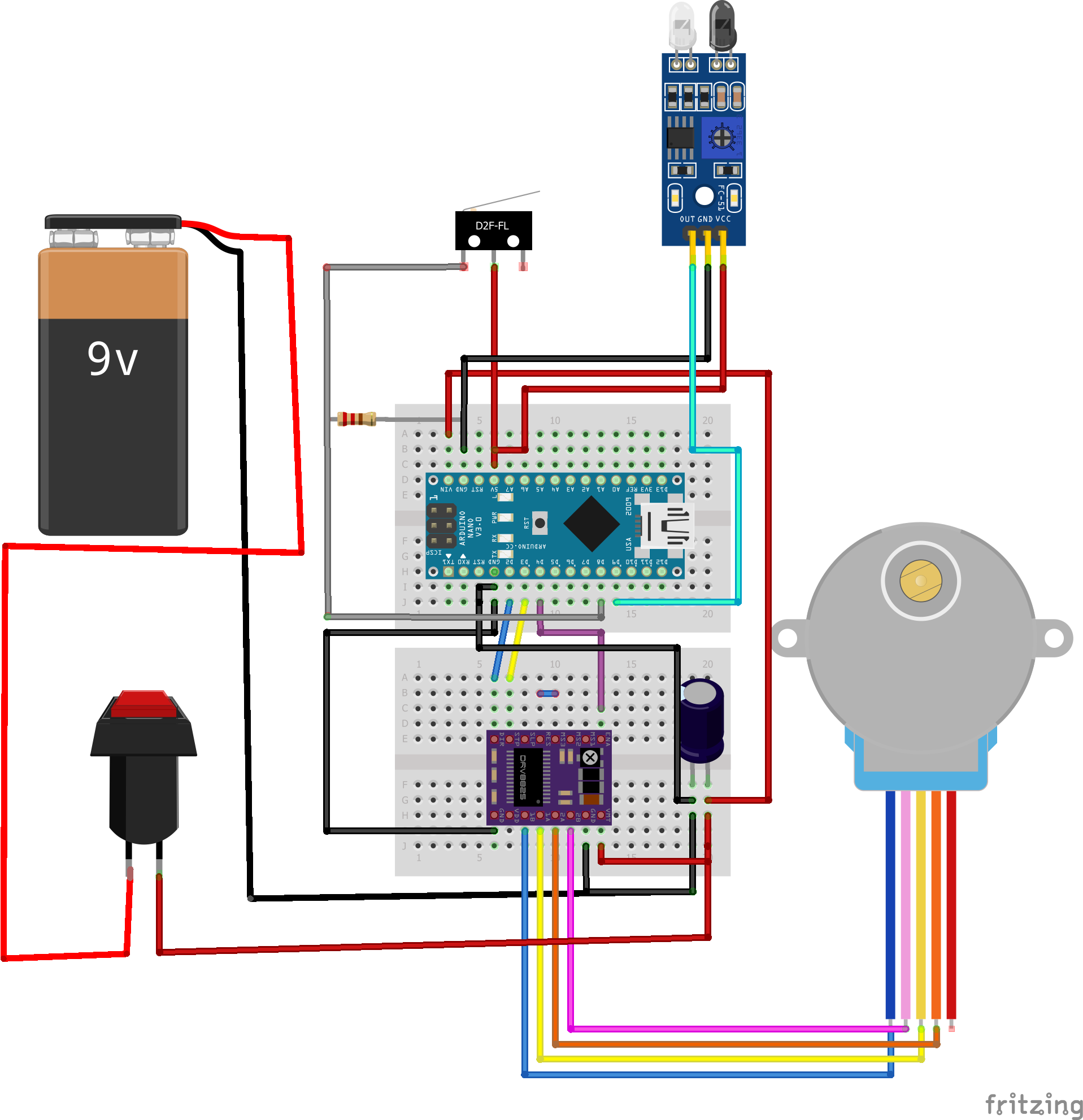
Het is tijd om het elektronische circuit te maken! Sluit om te beginnen de aarde van de 9V-batterij aan op de Arduino-aarde met een elektrolytische condensator van 100 F ertussen (onthoud dat de kant van de condensator met de witte lijn de aarde/kathode is). Sluit de 9V aan op een generieke aan-uitschakelaar en vervolgens op Vin op de anode van de condensator. Ik gebruik twee mini-breadboards omdat ze goed in de behuizing passen, gebruik een breadboard dat je leuk vindt, maar houd rekening met de beperkte ruimte.
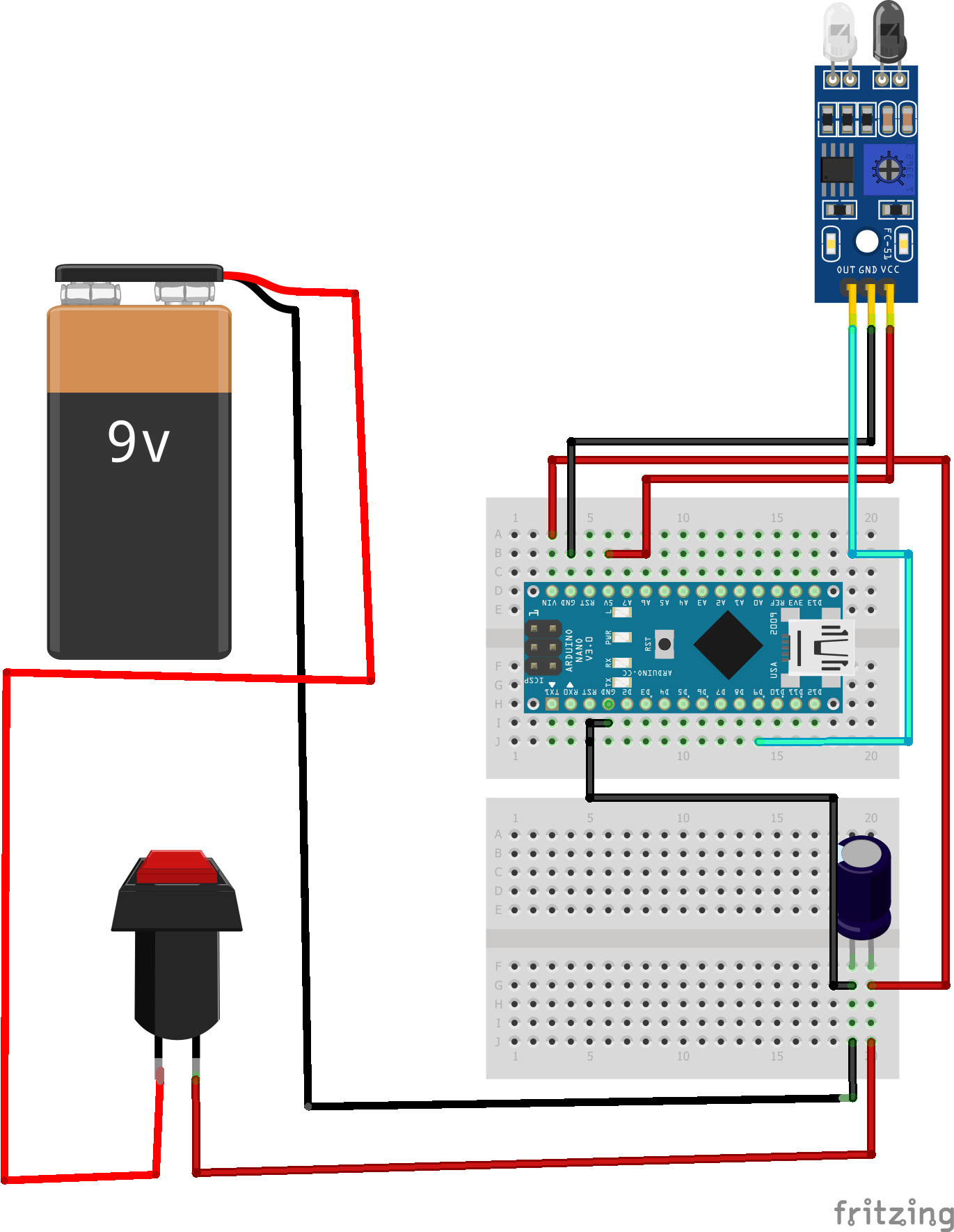
Sluit de IR-obstakelsensor VCC aan op 5V, aarde op aarde en tenslotte OUT op digitale pin 9.

Nu gaan we de eindstopschakelaar aansluiten. Sluit de gemeenschappelijke poot aan op 5V en de normaal open op digitale pin 8 en op aarde via een weerstand van 1 kΩ.
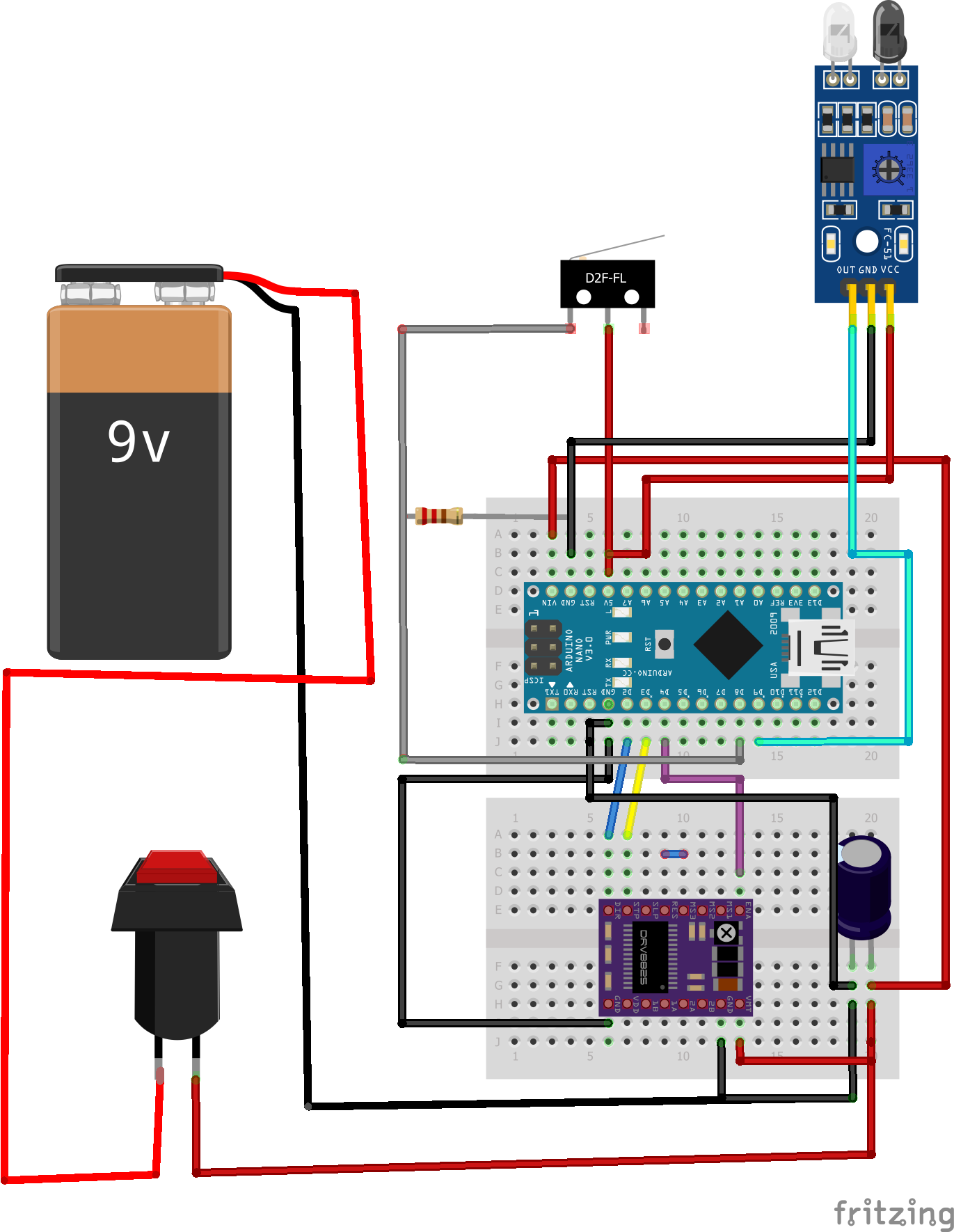
Voeg de DRV8825 bipolaire motordriver toe aan het breadboard. Verbind de Vmot met de Vin van de Arduino. Verbind de twee aardingen met aarde. Verbind de Dir-pin met Digital-pin 2, de Step-pin met Digital-pin 3, de Enable-pin met Digital-pin 4. Verbind de Reset- en Sleep-pin met elkaar.
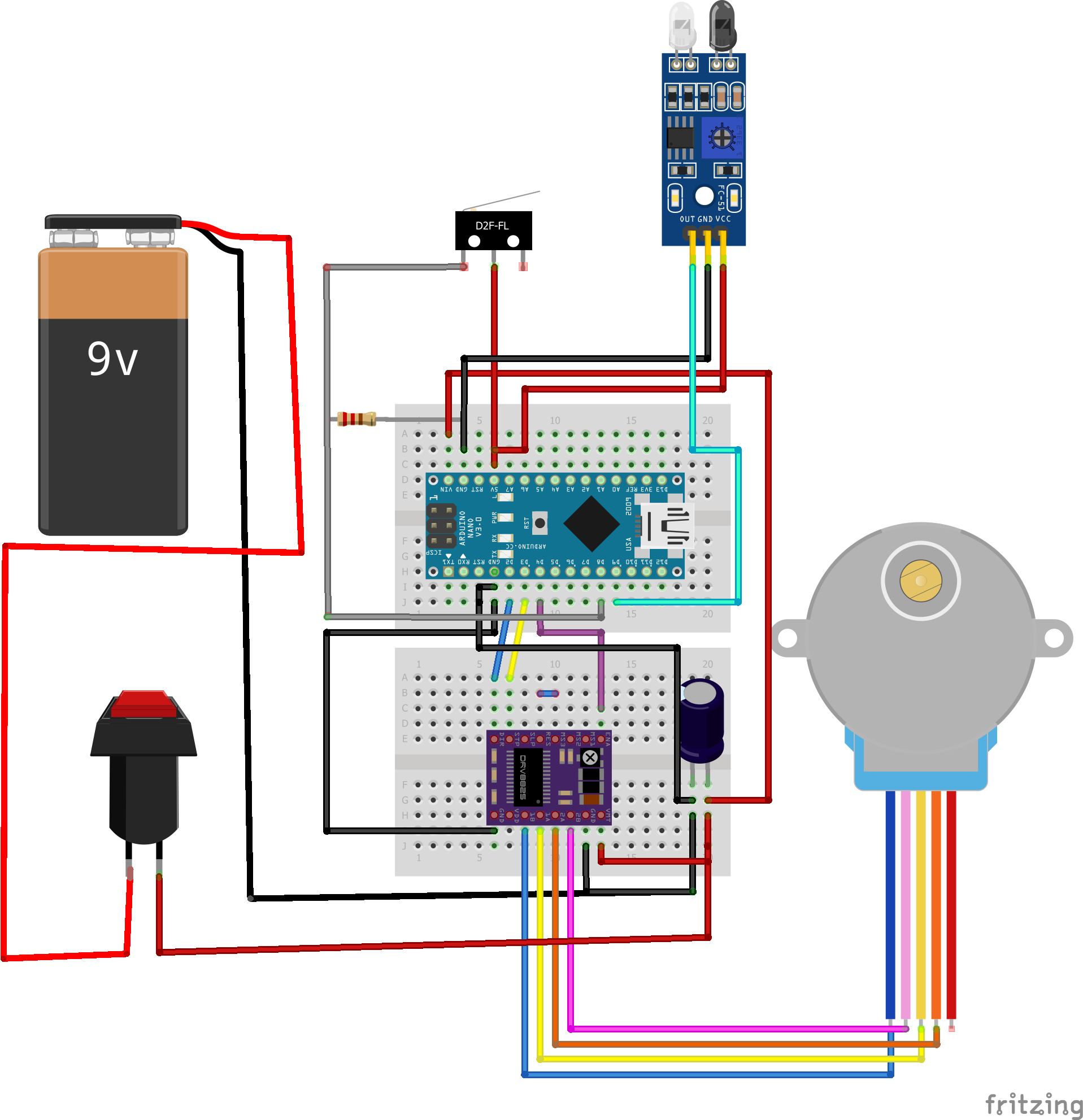
Sluit tot slot de blauwe kabel van de 28BYJ-48 aan op A2, de gele kabel op A1, de oranje kabel op B1 en de roze kabel op B2.
De elektronica is eindelijk aangesloten!
Stap 9:Programmeren
const int dirPin =2; We definiëren de Dir-pin van de driver als de digitale pin 2.
const int stepPin =3; We definiëren de Step-pin van de driver als de Digital-pin 3.
const int enablePin =4; We definiëren de Enable-pin van het stuurprogramma als de digitale pin 4.
const int stepsPerRevolution =6000; We definiëren het aantal stappen per omwenteling als 6000, een rotatie van 360 graden is 2048 stappen.
int endStop =8; We definiëren de ingangspin van de endStop-schakelaar als de digitale pin 8.
int irSensor =9; We definiëren de ingangspin van de IR-obstakelsensor als de digitale pin 9.
void setup()
{
pinMode(endStop, INPUT);
pinMode(irSensor,INPUT); In de installatie verklaren we de endStop- en irSensor-pinnen als invoer.
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
pinMode(enablePin, OUTPUT); We declareren de stepPin, dirPin en enablePin als outputs.
digitalWrite(enablePin, LOW); We hebben de enablePin LOW ingesteld om het DRV8825-stuurprogramma in te schakelen
while(digitalRead(endStop) ==LAAG)
{ Zolang de digitale waarde van de endStop-schakelaar LAAG is (de schakelaar wordt niet ingedrukt.)
digitalWrite(dirPin, HIGH); de draairichting van de motor is tegen de klok in ingesteld
for(int x =0; x <1; x++)
{
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite( stepPin, LAAG);
delayMicroseconds(2000);
} en de stepper zal stap voor stap tegen de klok in draaien totdat de voorwaarde van het While-statement onwaar is.
digitalWrite(enablePin, HIGH);
} Dit schakelt onze driver uit, zodat de driver niet veel stroom verbruikt wanneer hij niet in gebruik is.
void loop()
{
if(digitalRead(irSensor)==0)
{ In de lus als de digitale waarde van de irSensor 0 is (er is een obstakel (hand) voor de IR Obstacle-sensor)
digitalWrite(enablePin, LOW); Het stuurprogramma wordt ingeschakeld.
digitalWrite(dirPin, LOW); De draairichting van de motor is met de klok mee ingesteld.
for(int x =0; x
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite( stepPin, LAAG);
delayMicroseconds(2000);
} De stepper draait 6000 stappen met de klok mee.
delay(2000); Het zal 2 seconden wachten.
while(digitalRead(endStop) ==LAAG)
{ Zolang de digitale waarde van de endStop-schakelaar LAAG is (de schakelaar wordt niet ingedrukt.
digitalWrite(dirPin, HIGH); de draairichting van de motor is ingesteld als tegen de klok in.
for(int x =0; x <1; x++)
{
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite( stepPin, LAAG);
delayMicroseconds(2000);
}
} en de stepper zal stap voor stap tegen de klok in draaien totdat de voorwaarde van het While-statement onwaar is.
digitalWrite(enablePin, HIGH);
}
} Dan wordt het stuurprogramma uitgeschakeld totdat de voorwaarde van het If-statement waar is en de code opnieuw wordt afgespeeld.
Stap 10:Montage
Dekselmontage


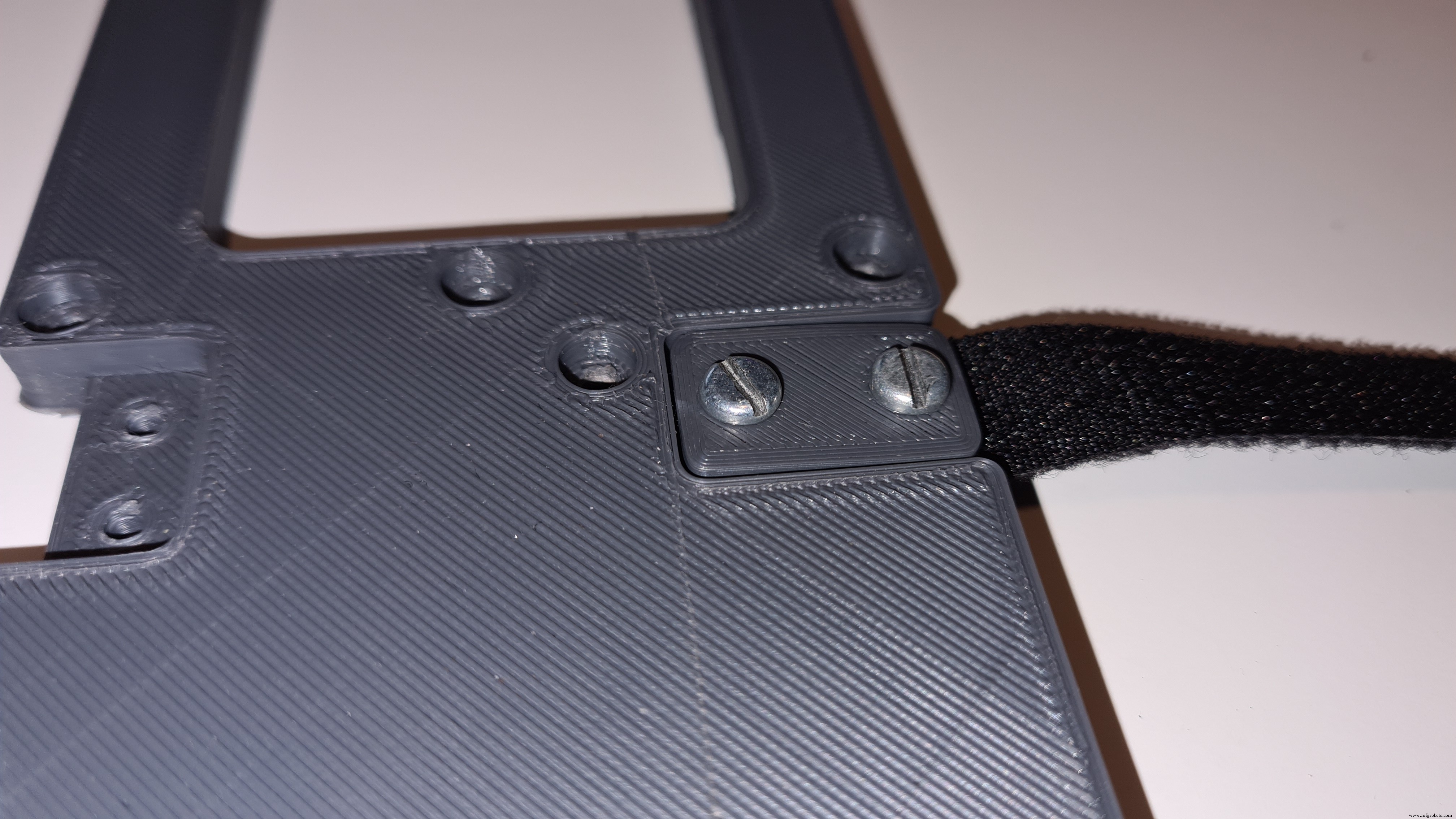

Plaats gewoon het klittenband in de opening, voeg de houder toe en schroef ze aan elkaar.
x2


Schroef het klittenband op de hoes. De dekselmontage is nu voltooid!
x2
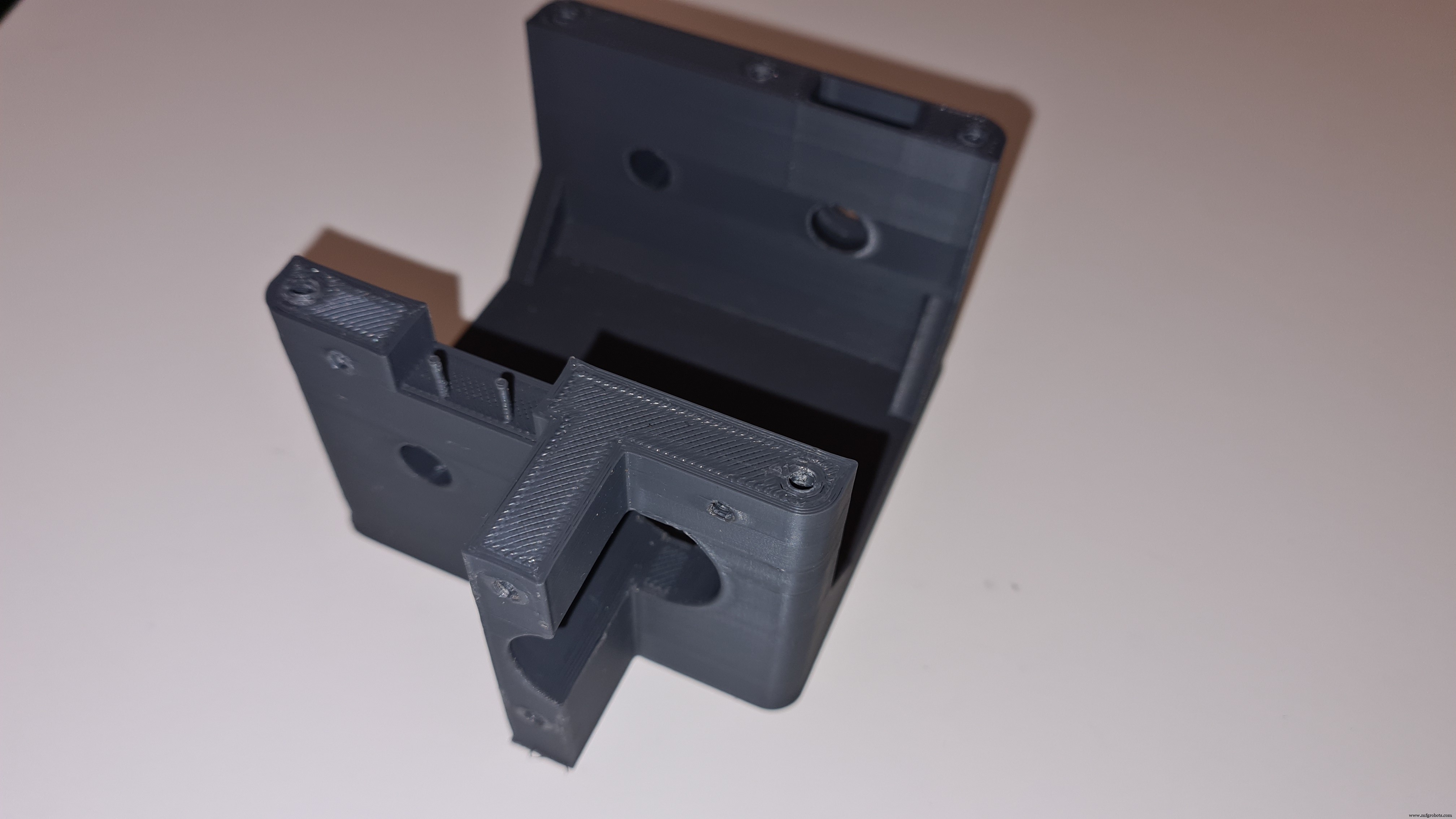
Perseenheid

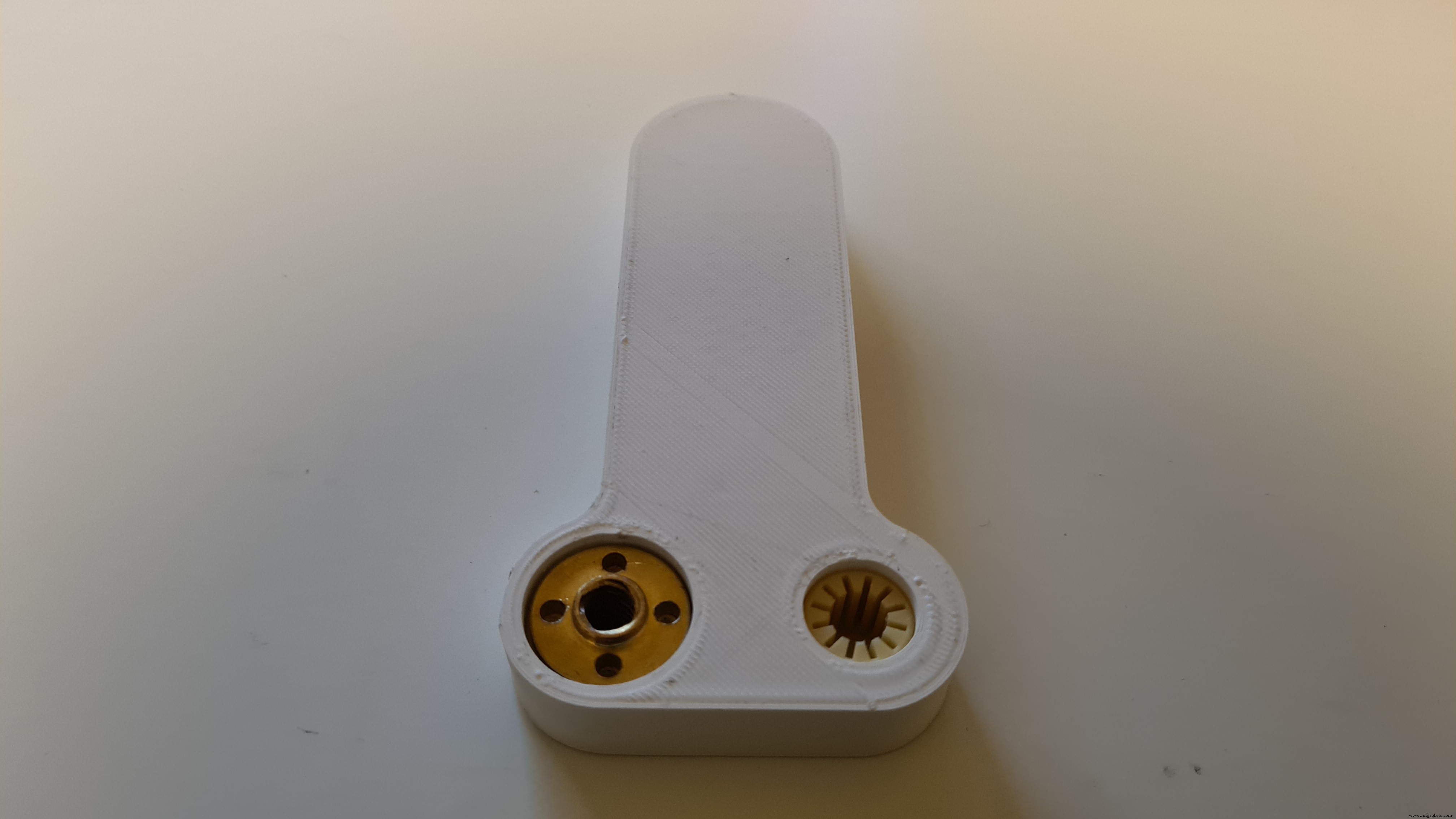

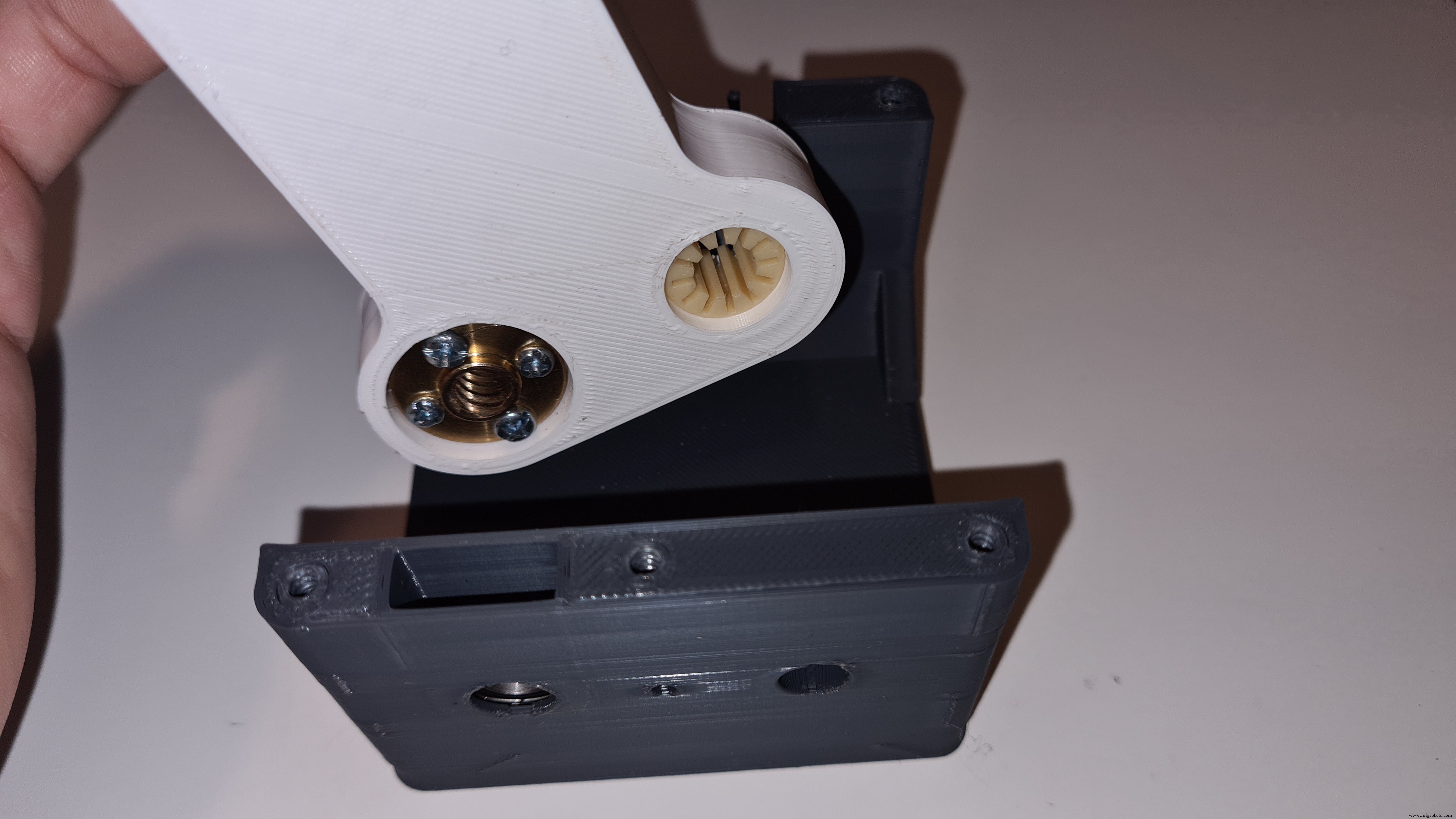
Duw het lineaire lager in het rechter gat totdat het in het midden zit. Schroef de T8-moer met 4 schroeven in het linkergat van de pers.
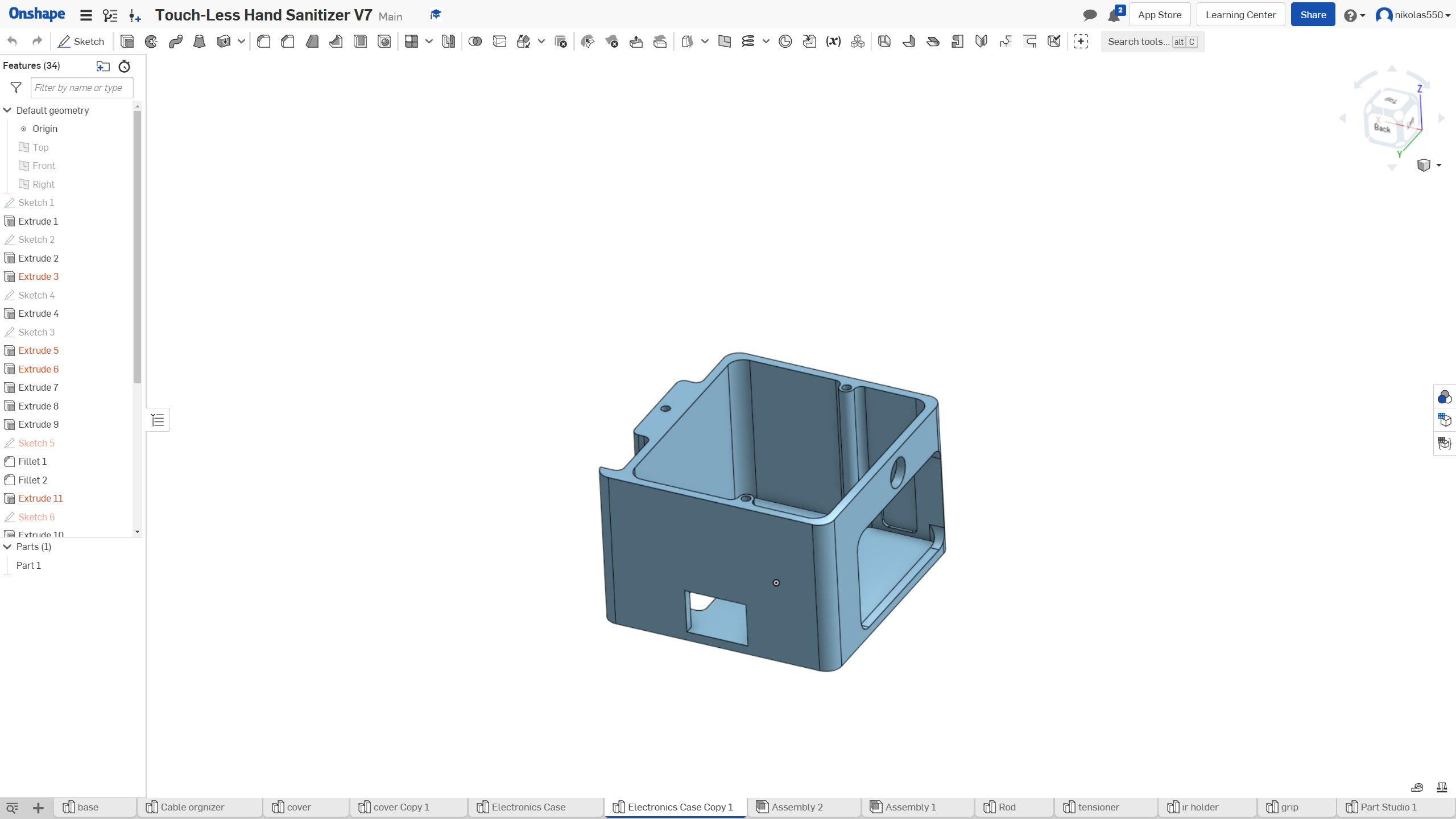
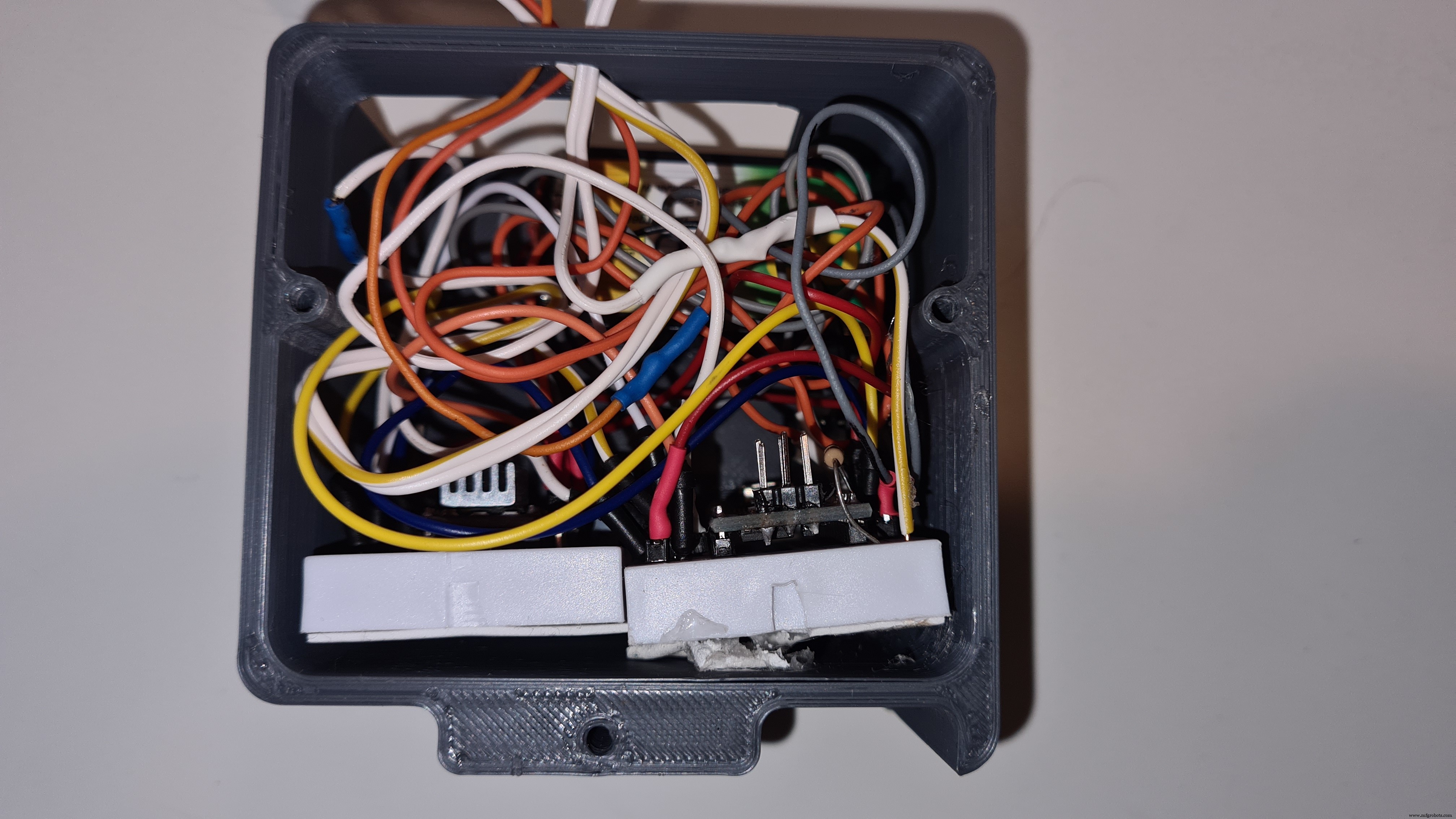
Elektronica behuizing assemblage
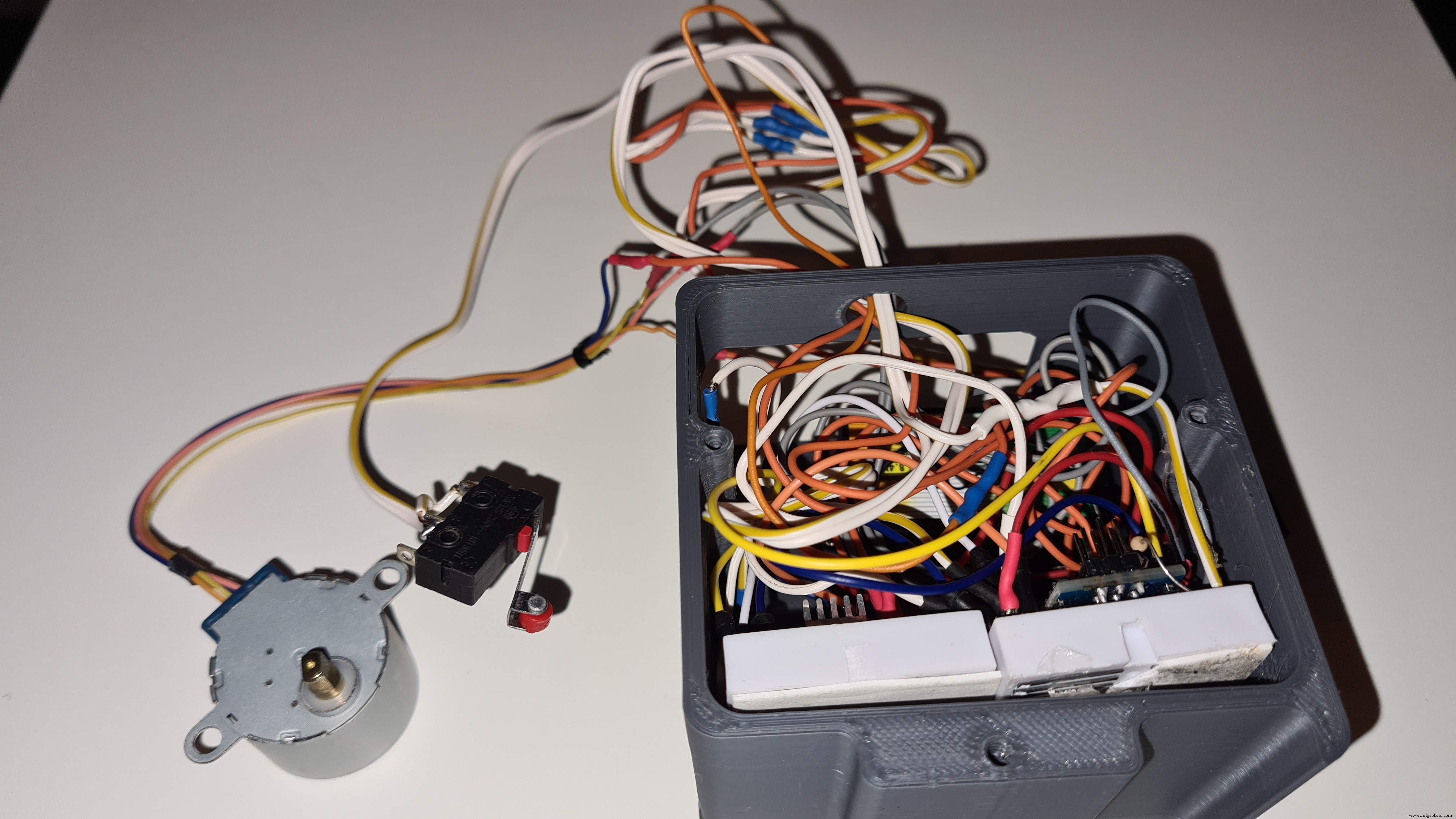
Stop je schakeling in de elektronicakoffer. Leid de kabels van de stepper, de schakelaar en de IR-obstakelsensor door het gat.
Montage IR-obstakelsensorhouder
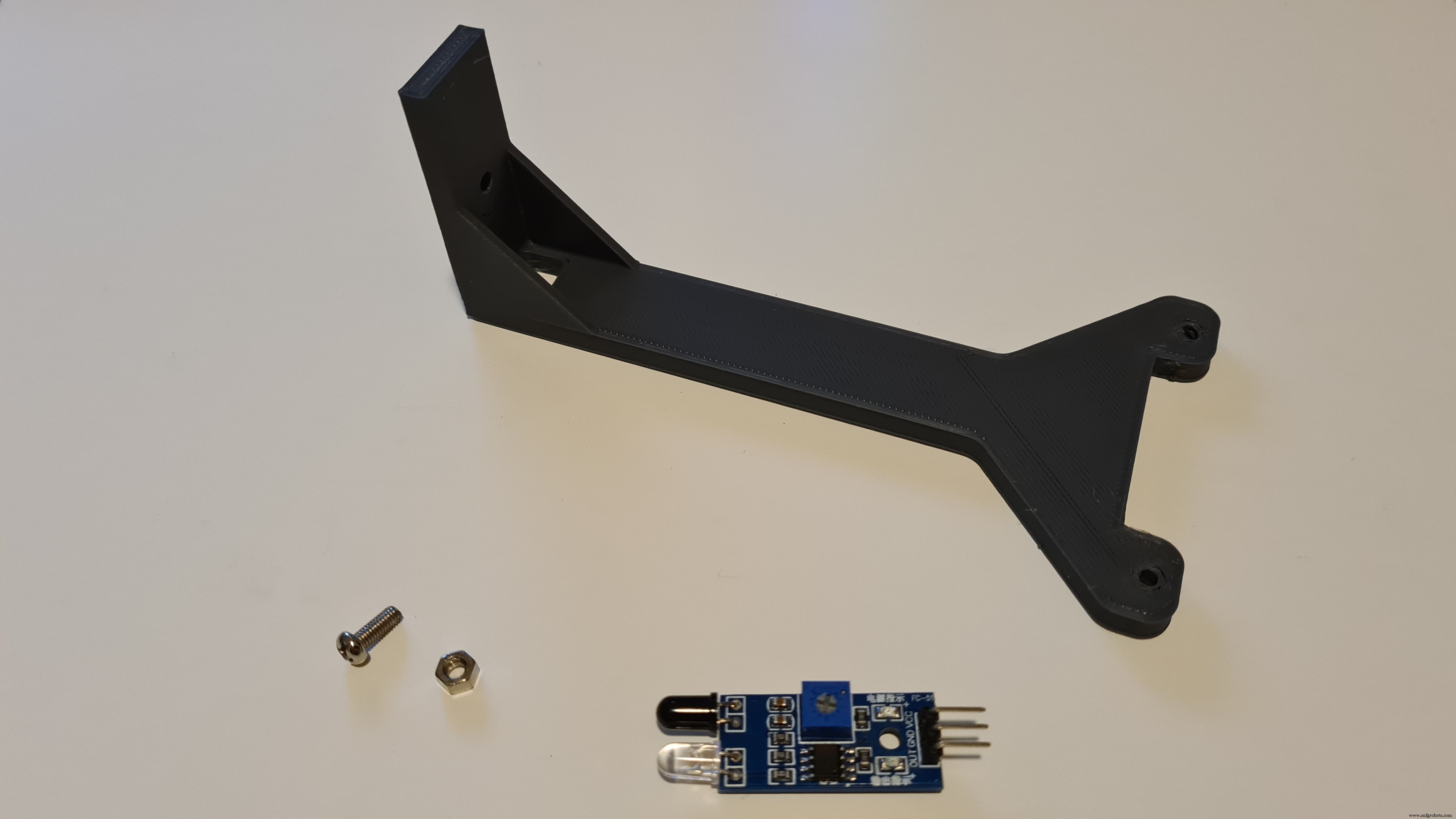
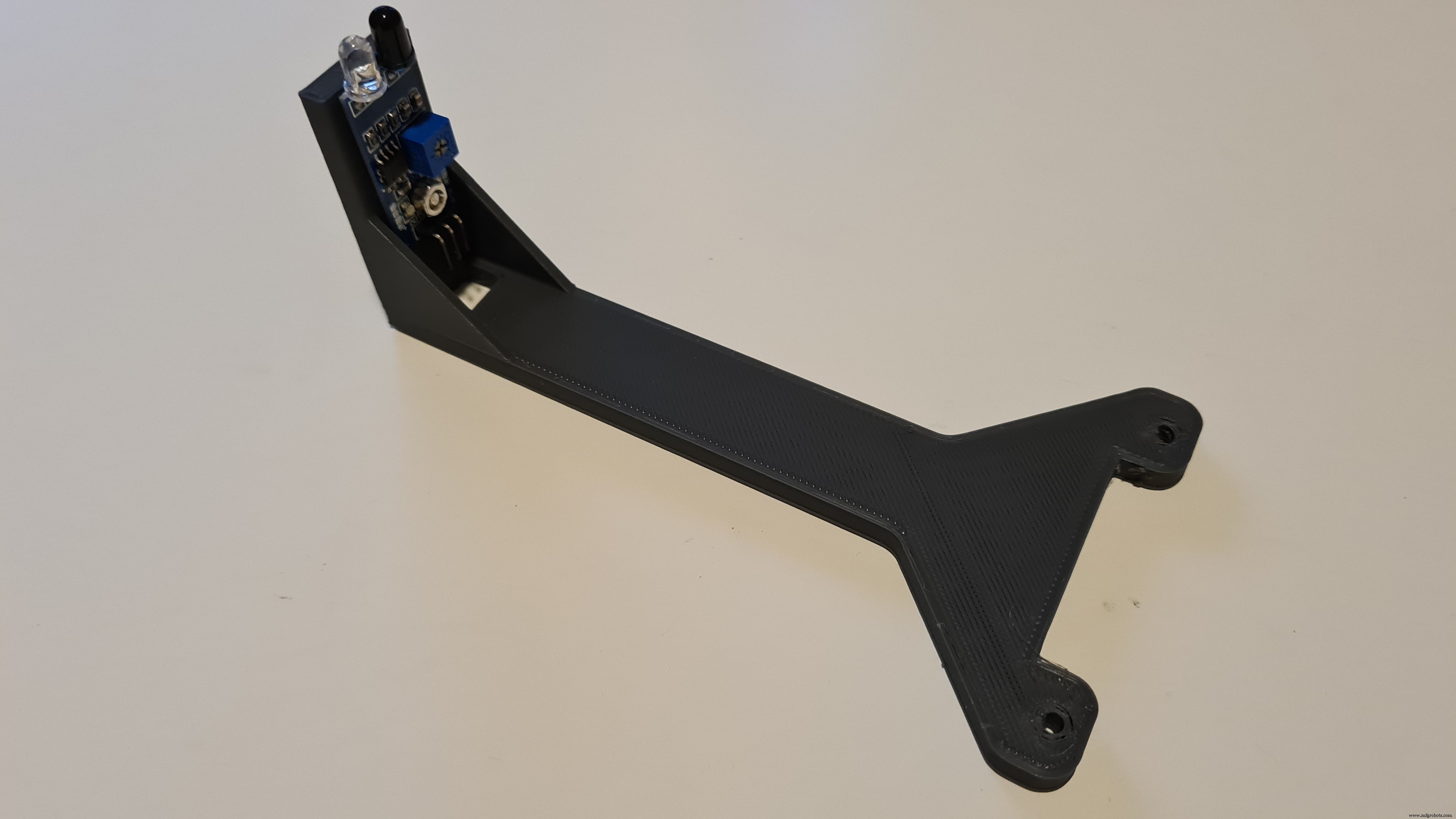
Schroef de IR-obstakelsensor op het gat en gebruik een moer om de pasvorm vast te zetten en de positie aan te passen.
Eindmontage!
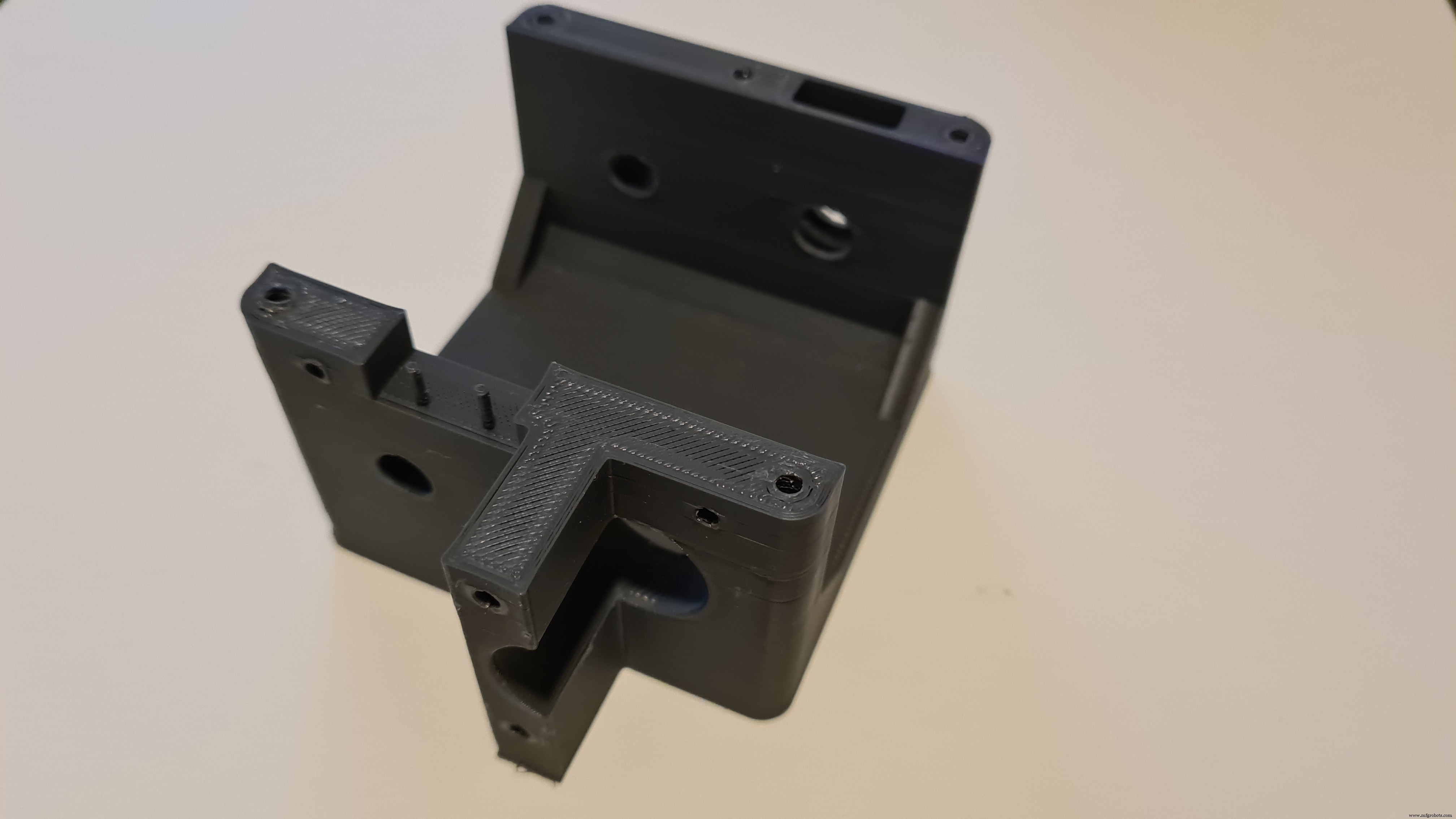
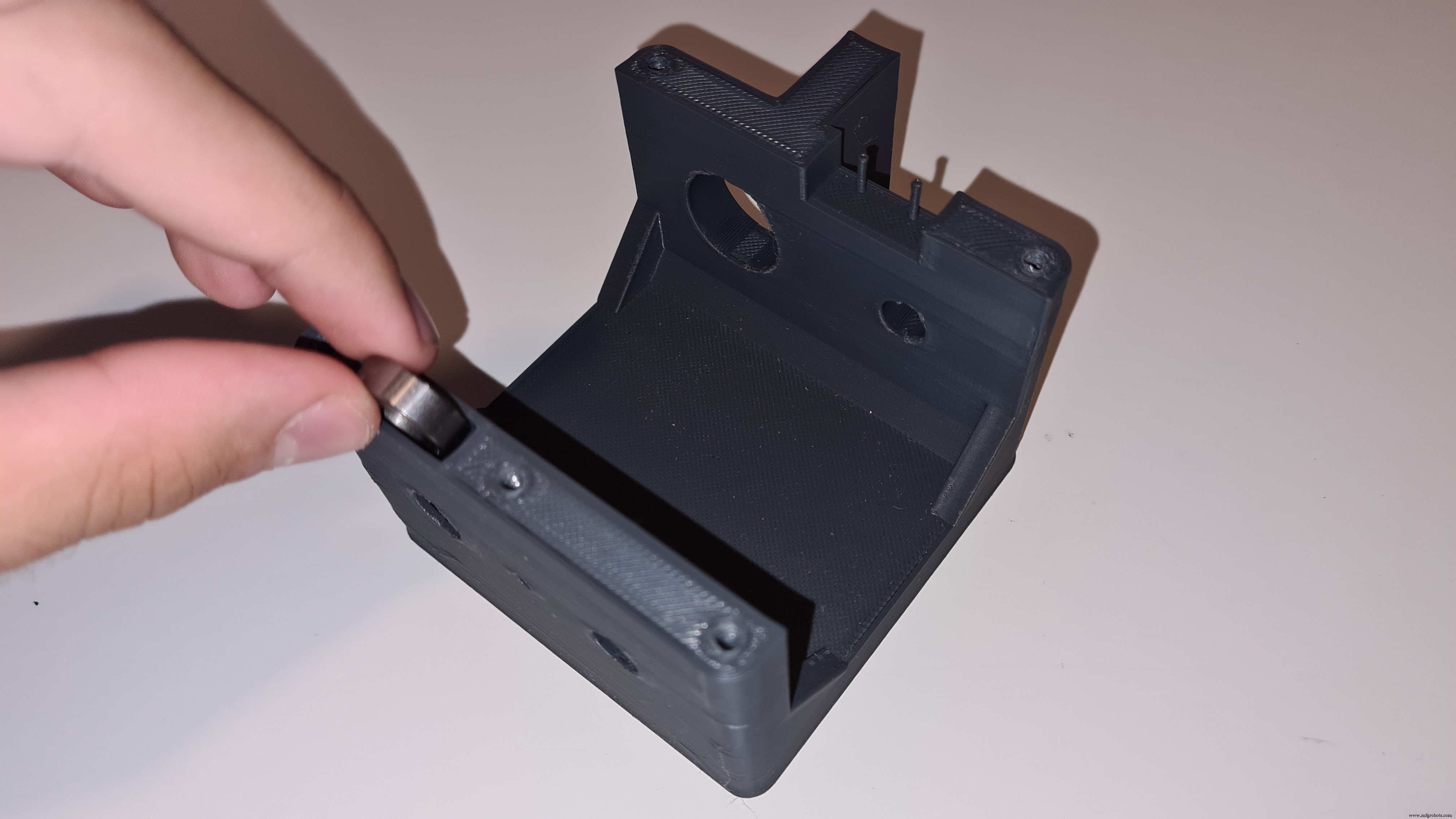
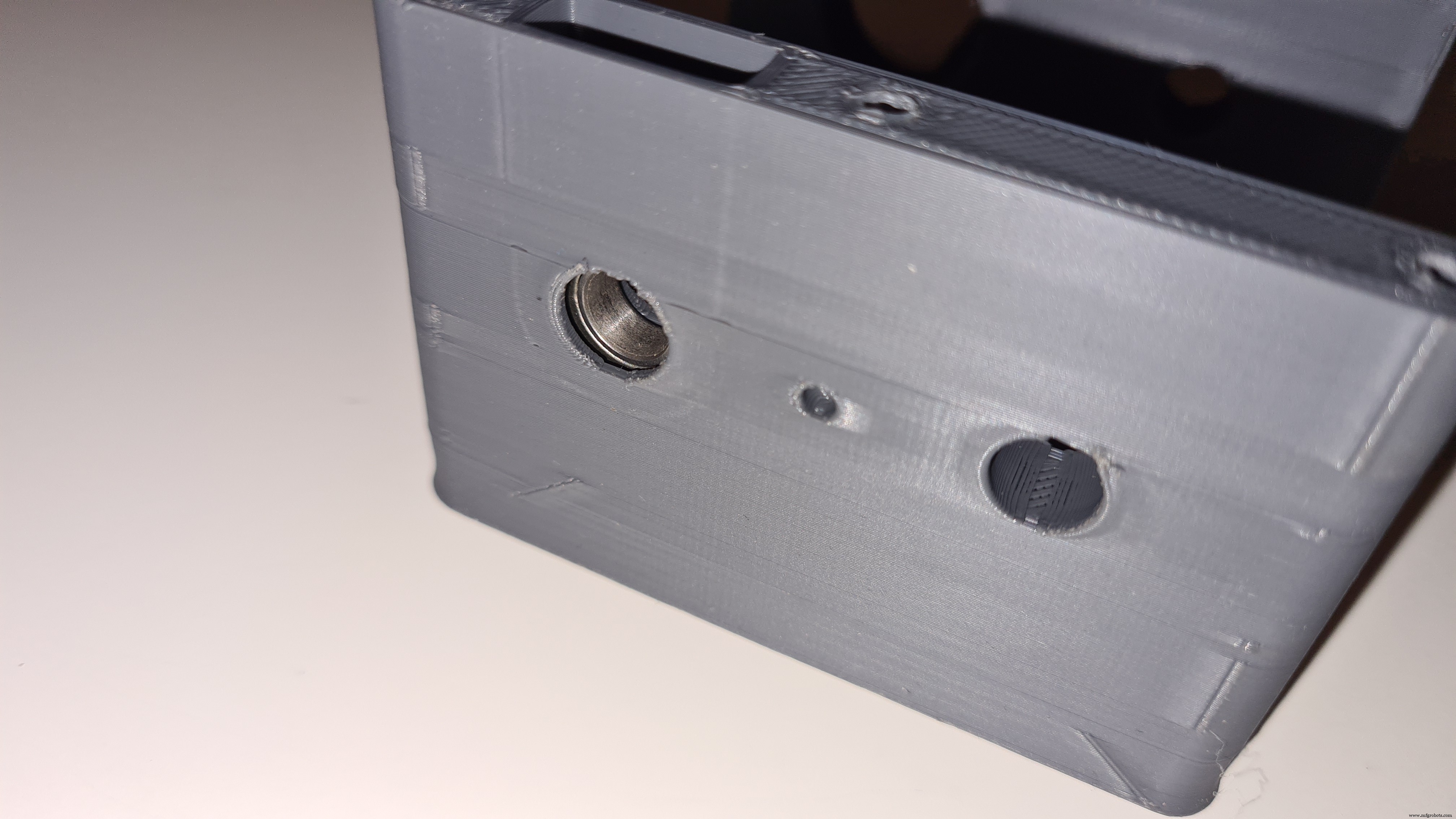
Plaats het lager.

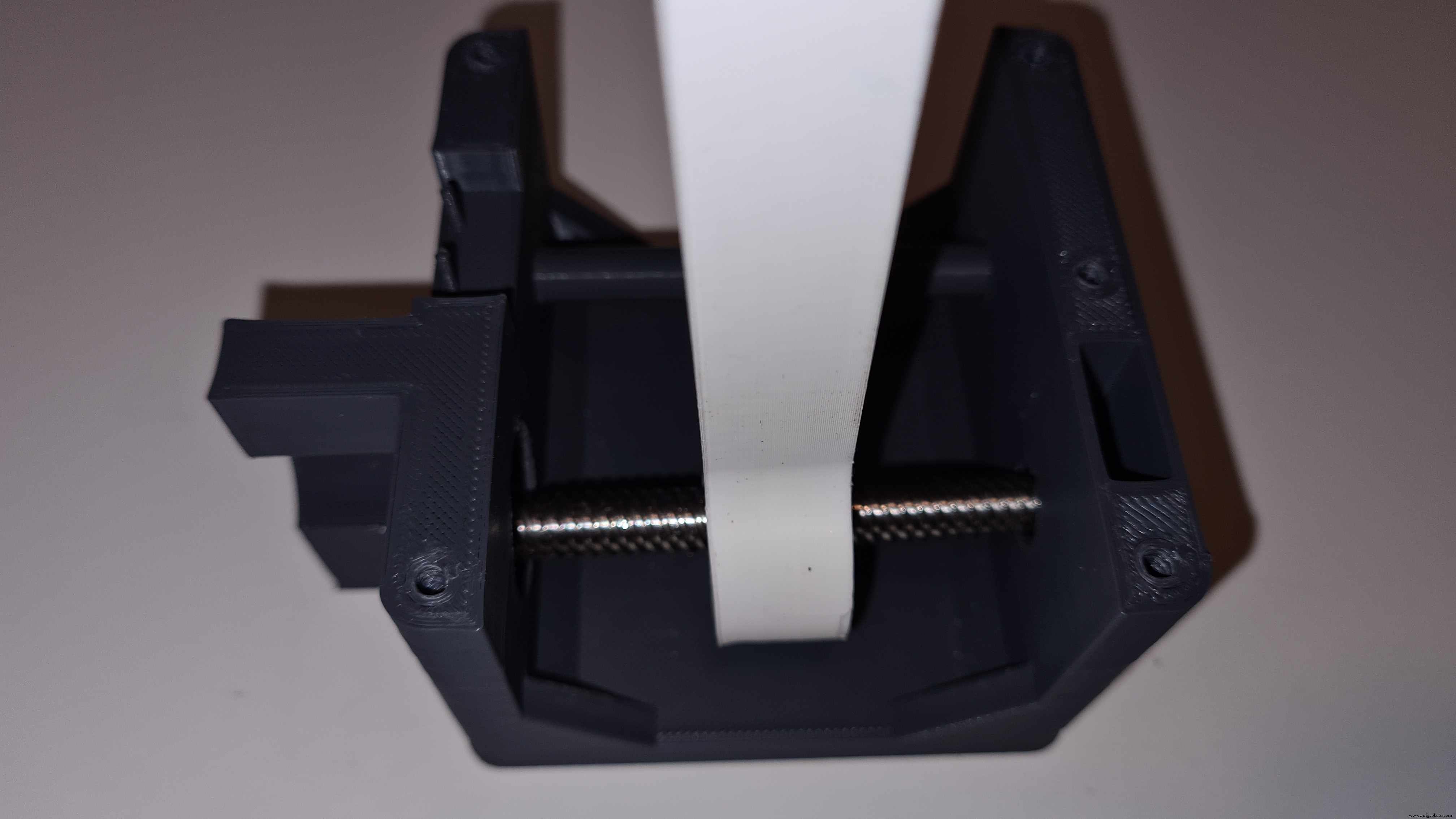
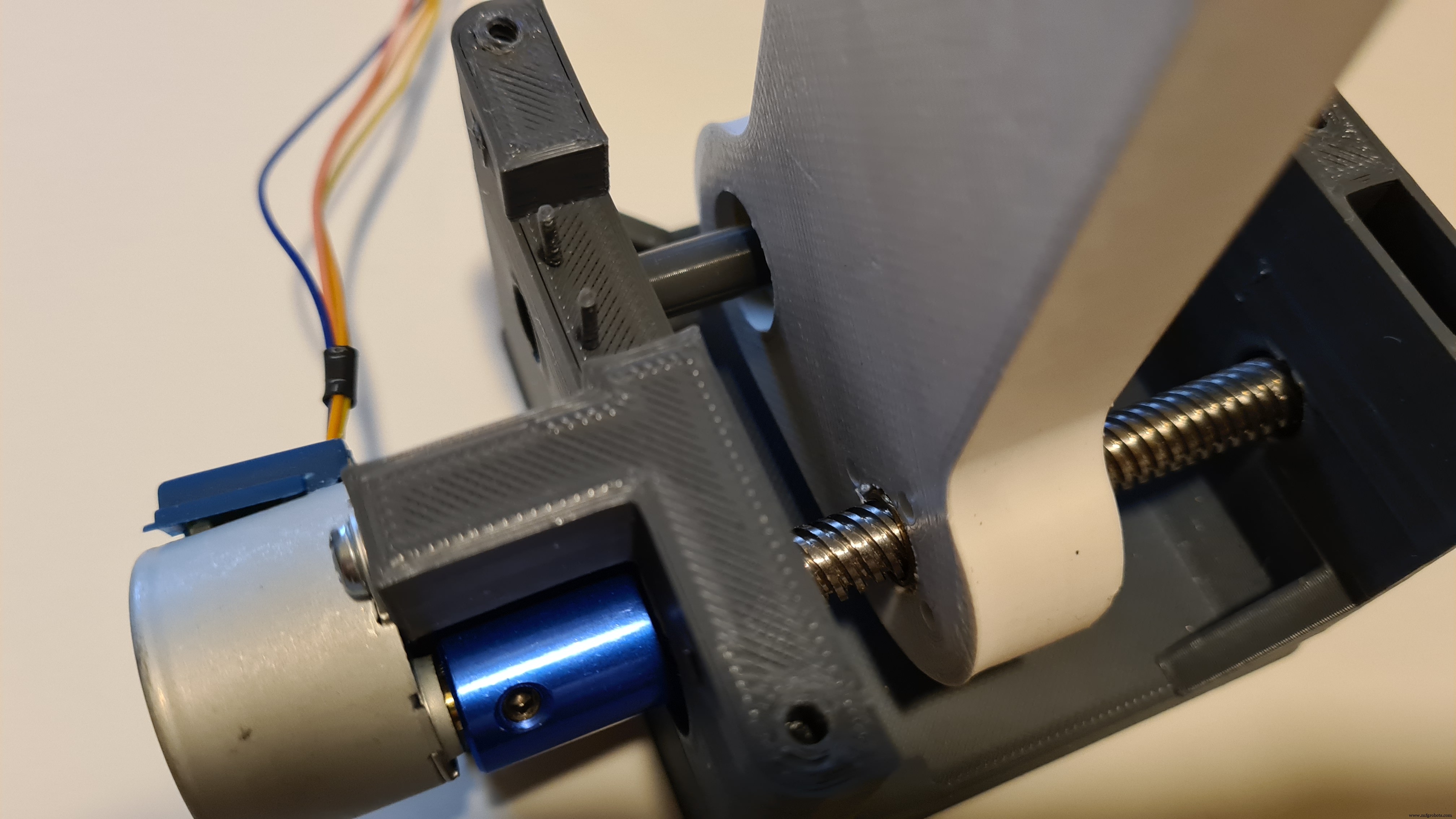
Voeg de T8-schroef en de perseenheid toe. (De T8-schroef moet 70 mm tot 82 mm lang zijn . Als u een langere schroef heeft, moet u deze op de gewenste maat zagen met een gereedschap zoals een ijzerzaag. Anders kunt u proberen er een te 3D-printen.)

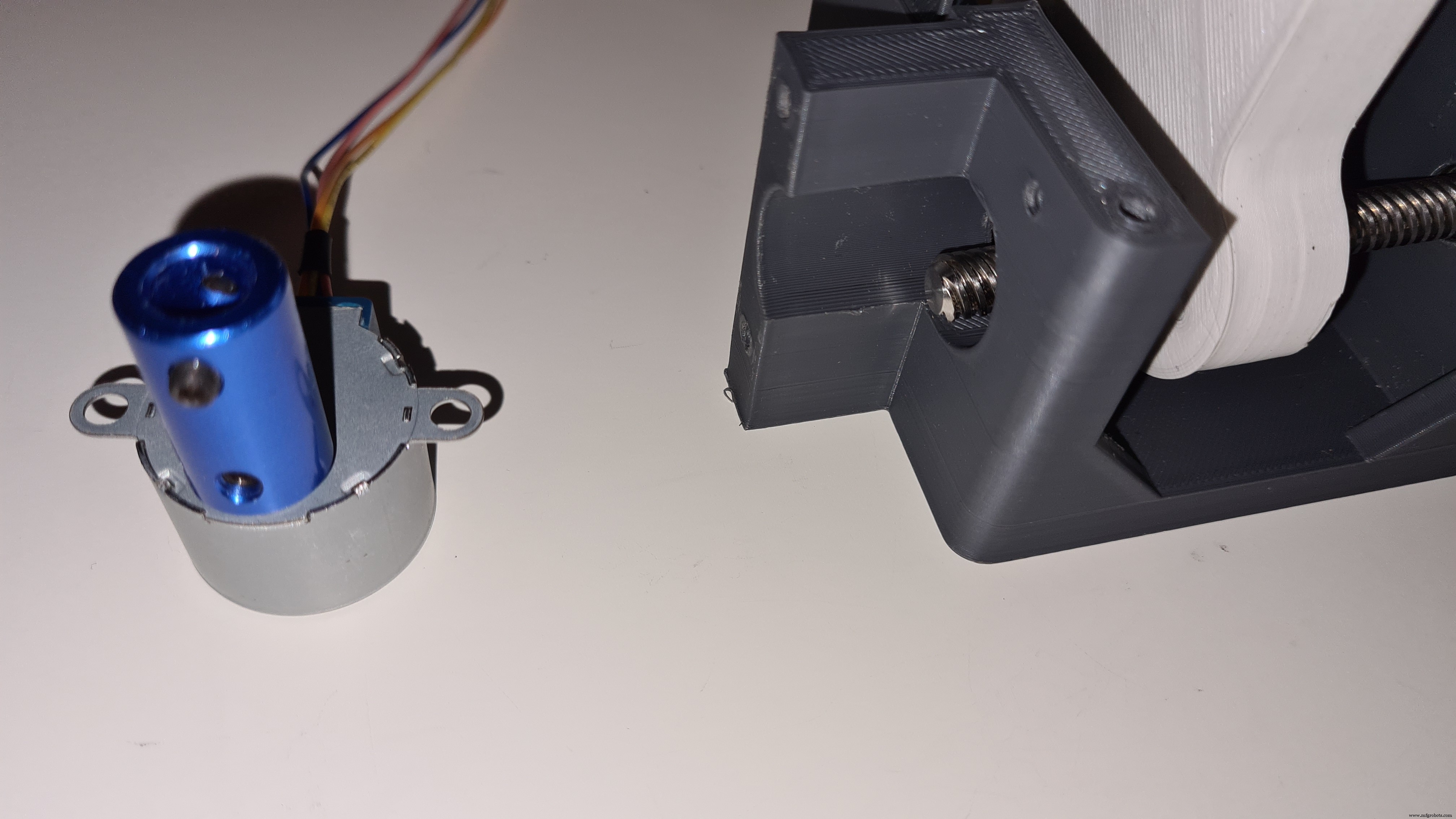
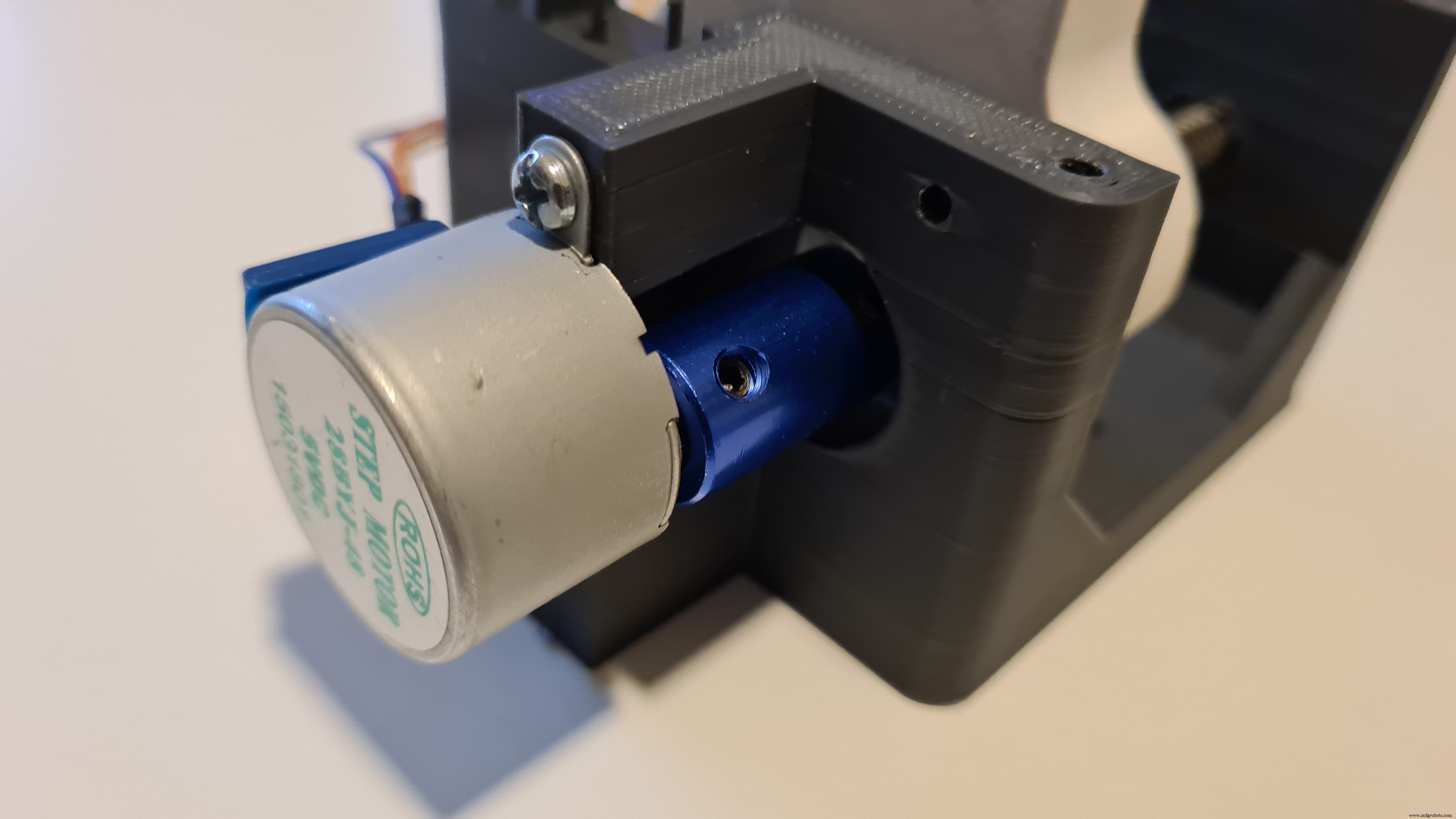
Draai de koppeling vast op de as van de motor. Draai het vervolgens vast aan de T8-schroef. Schroef tenslotte de motor met twee schroeven op de basis.
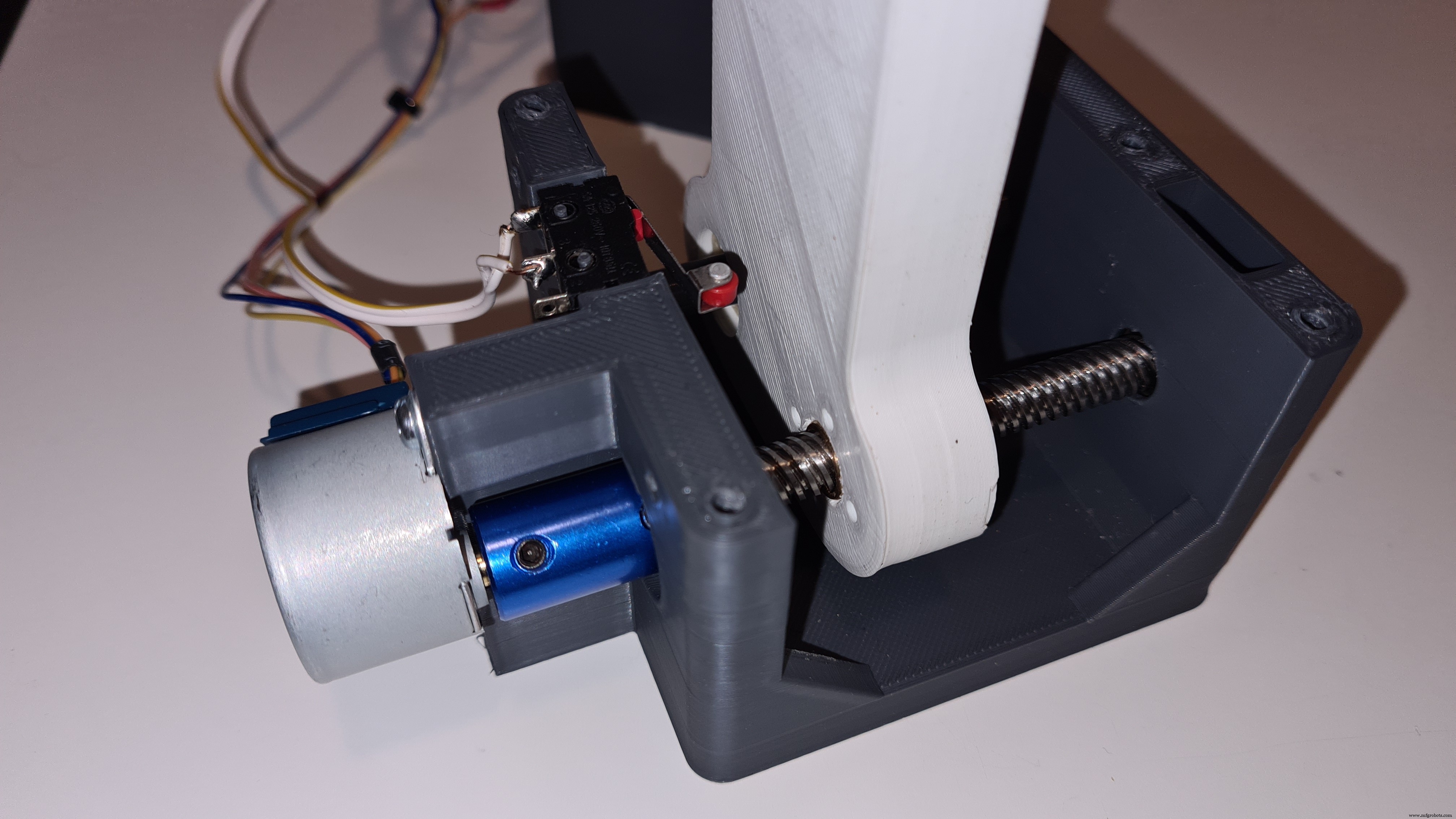
Voeg de eindstopschakelaar toe.
Schroef het deksel op de basis met 5 schroeven.


Schroef de IR-obstakelsensorhouder met 2 schroeven aan de voorkant van de basis.
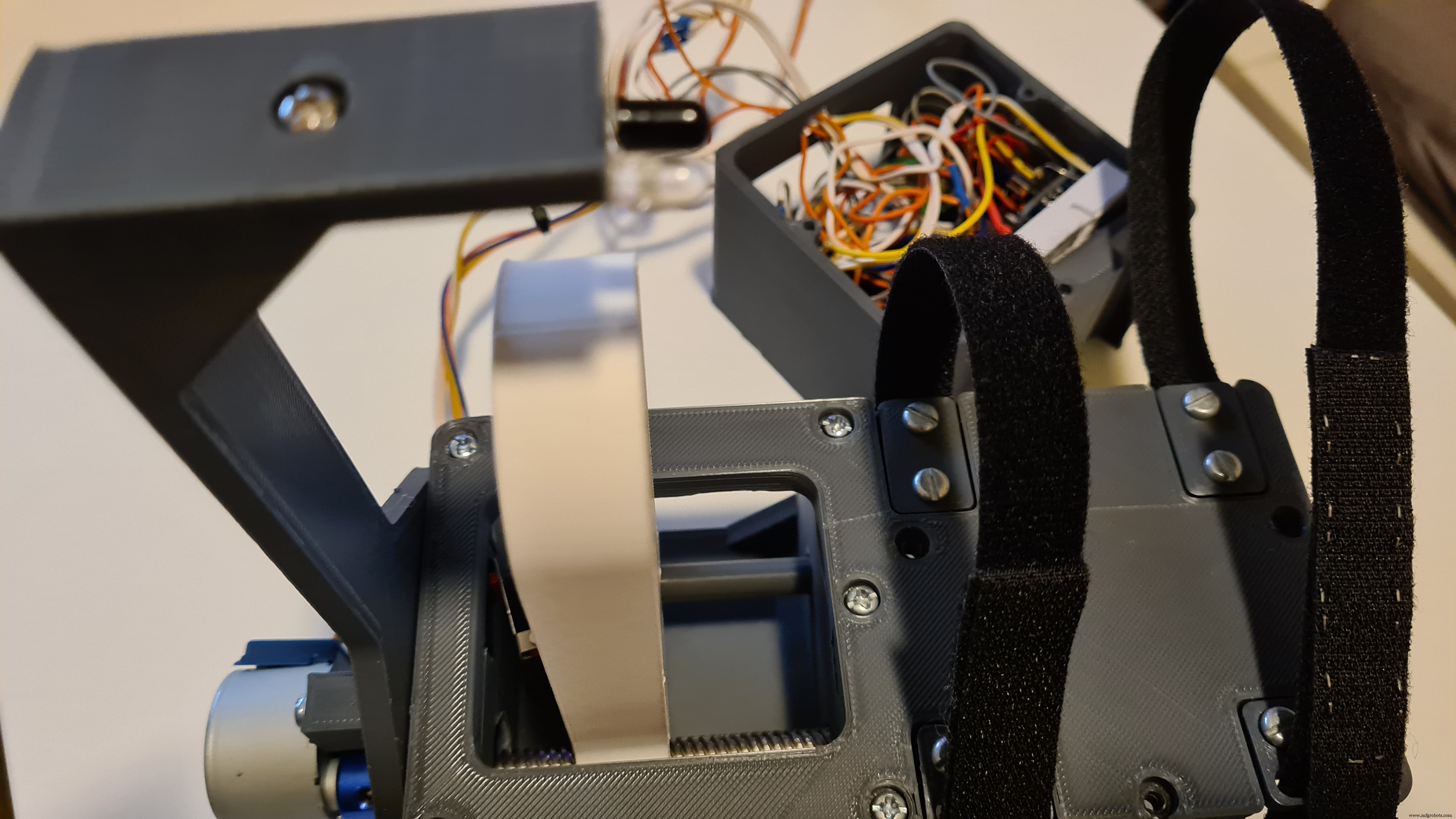
Schroef uiteindelijk de Electronics Case met 3 schroeven aan de Cover vast! Goed gedaan, het project is voltooid!
Conclusie

Dit project van een accessoire dat de meeste handdesinfectie-/zeepdispensers volledig automatisch en handsfree kan draaien, is eindelijk voltooid!!
Bedankt voor je tijd!!
Code
- Automatic_Hand_Sanitizer_Transformer.code
Automatic_Hand_Sanitizer_Transformer.codeArduino
De code van de gadget// Definieer pinverbindingen en motorstappen per omwentelingconst int dirPin =2; //we definiëren de dir-pin van de driverconst int stepPin =3;//we definiëren de step-pin van de driverconst int enablePin =4;//we definiëren de enable-pin van de driverconst int stepsPerRevolution =6000; // één volledige (360 graden) rotatie is 2048 stappen in endStop =8;//we definiëren de invoerpin van de eindstopschakelaarint irSensor =9;//we definiëren de invoerpin van de IR-obstakelsensorvoid setup(){ pinMode(endStop , INPUT);// Declareer pinnen als ingangen pinMode (irSensor, INPUT); pinMode (stepPin, OUTPUT);// Declareer pinnen als uitgangen pinMode (dirPin, OUTPUT); pinMode (enablePin, OUTPUT); digitalWrite (enablePin, LOW);// Dit stelt onze chauffeur in staat while(digitalRead(endStop) ==LOW)// Wanneer de code start, zal de stepper draaien totdat de eindstopschakelaar {//stopschakelaar wordt geactiveerd digitalWrite (dirPin, HIGH ); // de richtingen zijn ingesteld als tegen de klok in // Draai de motor langzaam voor (int x =0; x <1; x++) {digitalWrite (stepPin, HIGH); vertraging Microseconden (2000); digitalWrite (stepPin, LAAG); vertraging Microseconden (2000); } }digitalWrite(enablePin, HIGH);// Dit schakelt onze driver uit, zodat wanneer niet //in gebruik de driver geen stroom verbruikt}void loop(){ if(digitalRead(irSensor)==0)// Als er een obstakel (hand) voor de IR-obstakelsensor {digitalWrite(enablePin, LOW);//We activeren de driverdigitalWrite(dirPin, LOW);// de richting wordt met de klok mee ingesteld // Draai de motor langzaam voor(int x =0; x Aangepaste onderdelen en behuizingen
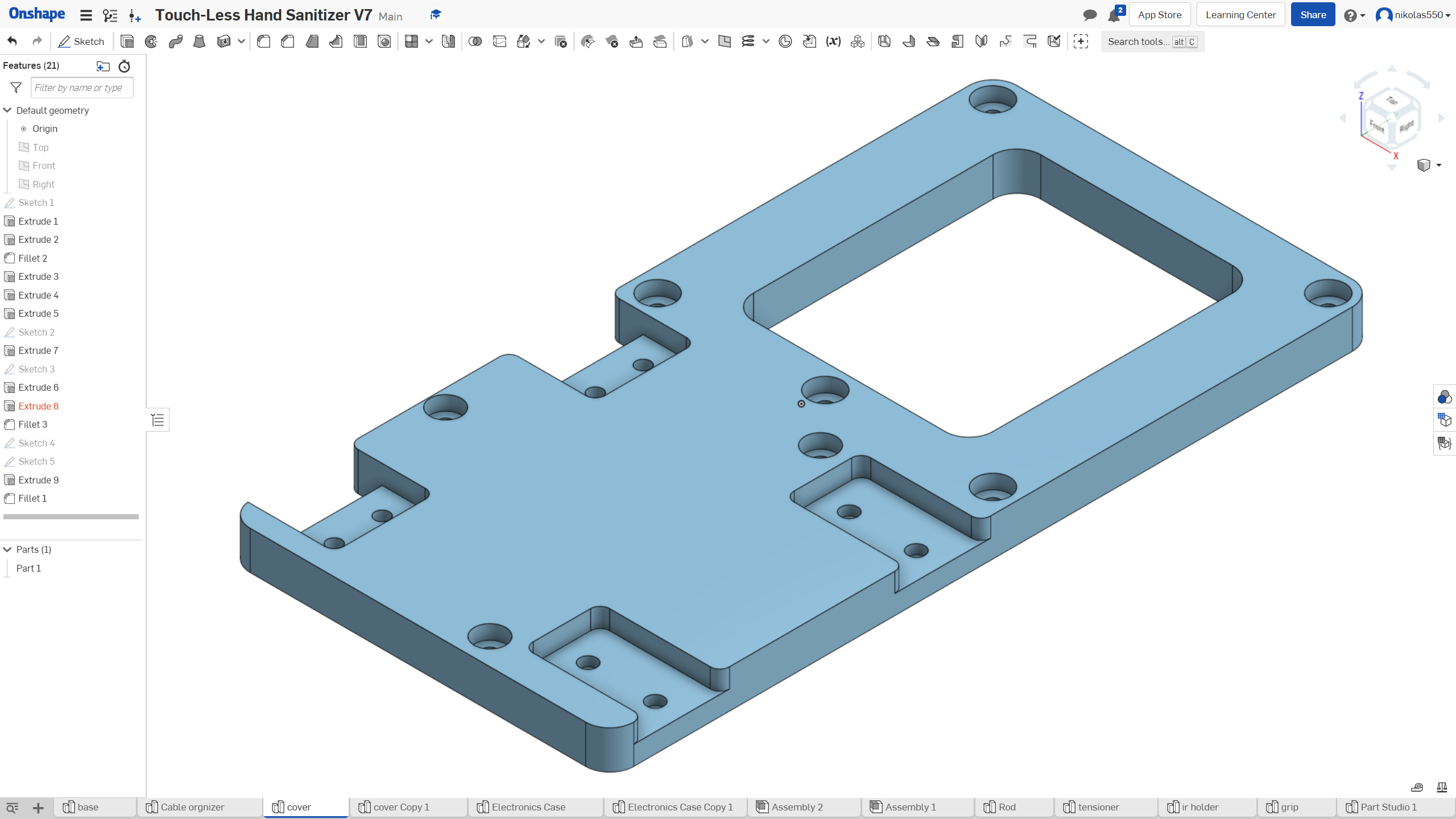
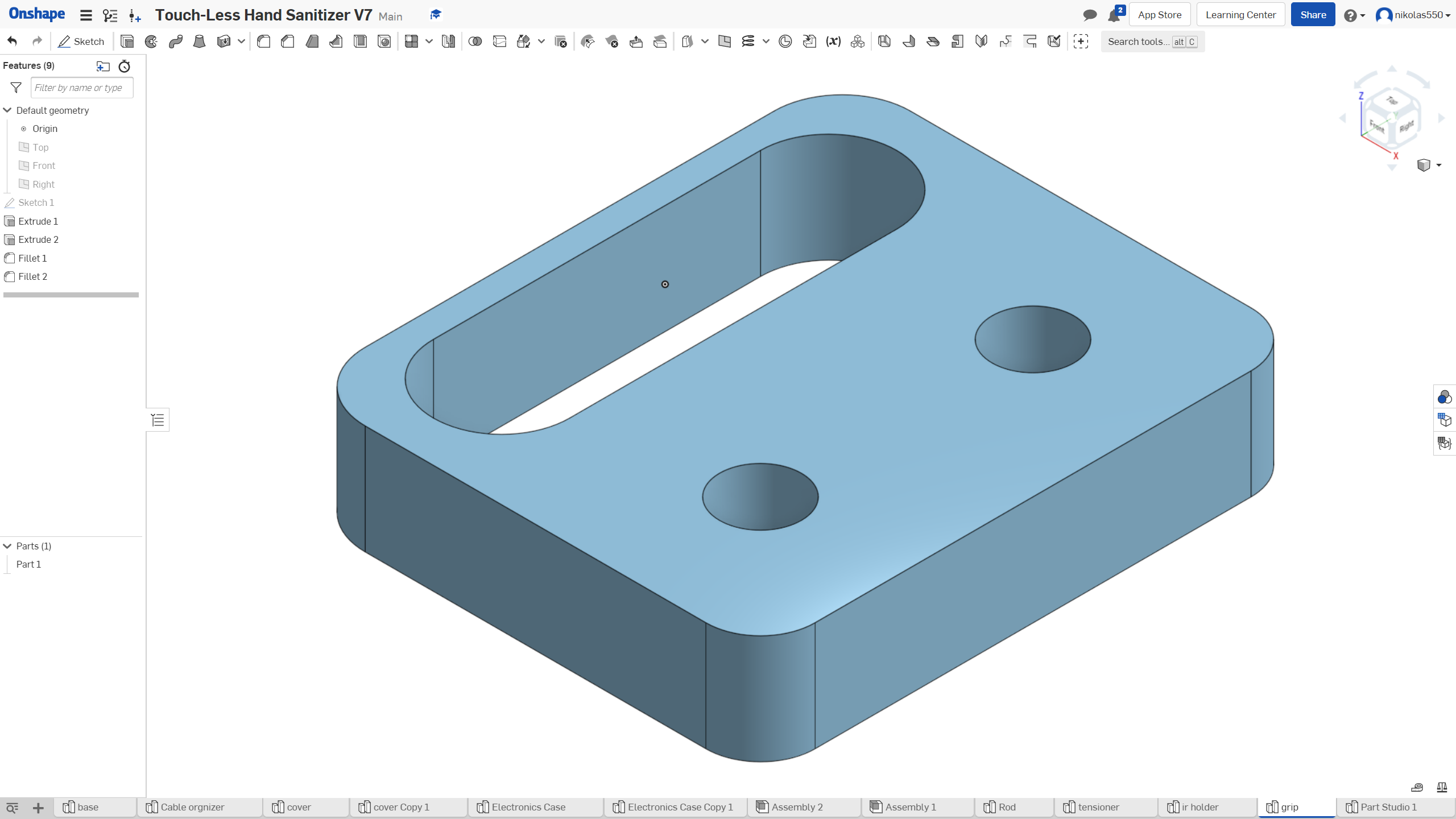
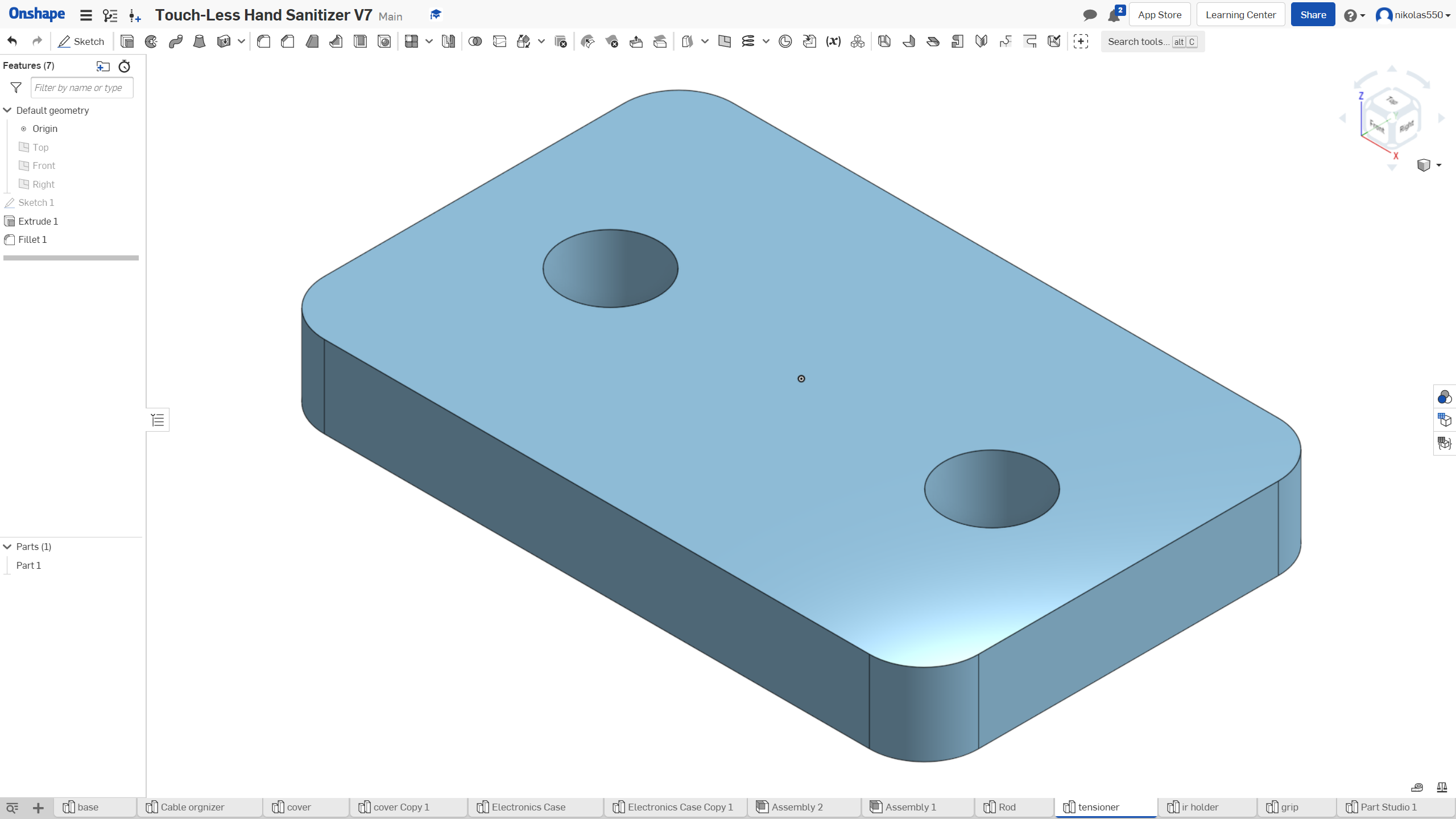
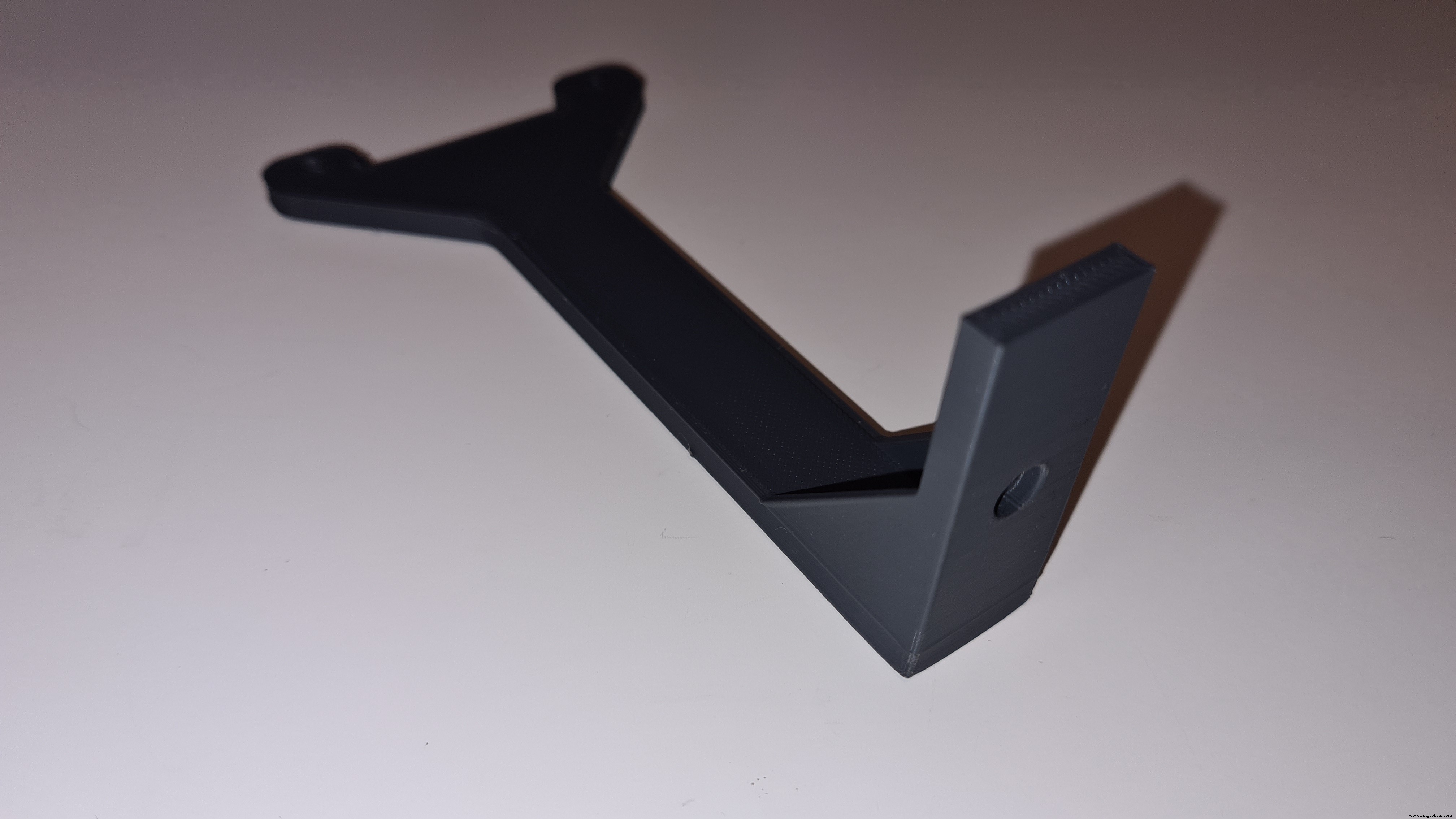
De hoofdbasis van het apparaat. Dit is het onderdeel dat daadwerkelijk op de dispenser drukt. Het deksel van het apparaat. Fungeert als een behuizing voor de elektronica. Creëert het klittenbandmechanisme.
Je hebt er twee nodig. Fungeert als ondersteuning voor het persgedeelte. Het wordt verbonden met de basis en fungeert als ondersteuning voor de ir-sensor. Houdt de klittenband op de hoes.
Je hebt er 2 nodig. Schema's
Productieproces