•Het percentage mensen met een handicap is toegenomen in zowel het landelijke als het stedelijke deel van India. De handicap kan zijn door geboorte of door een medische of accidentele reden.
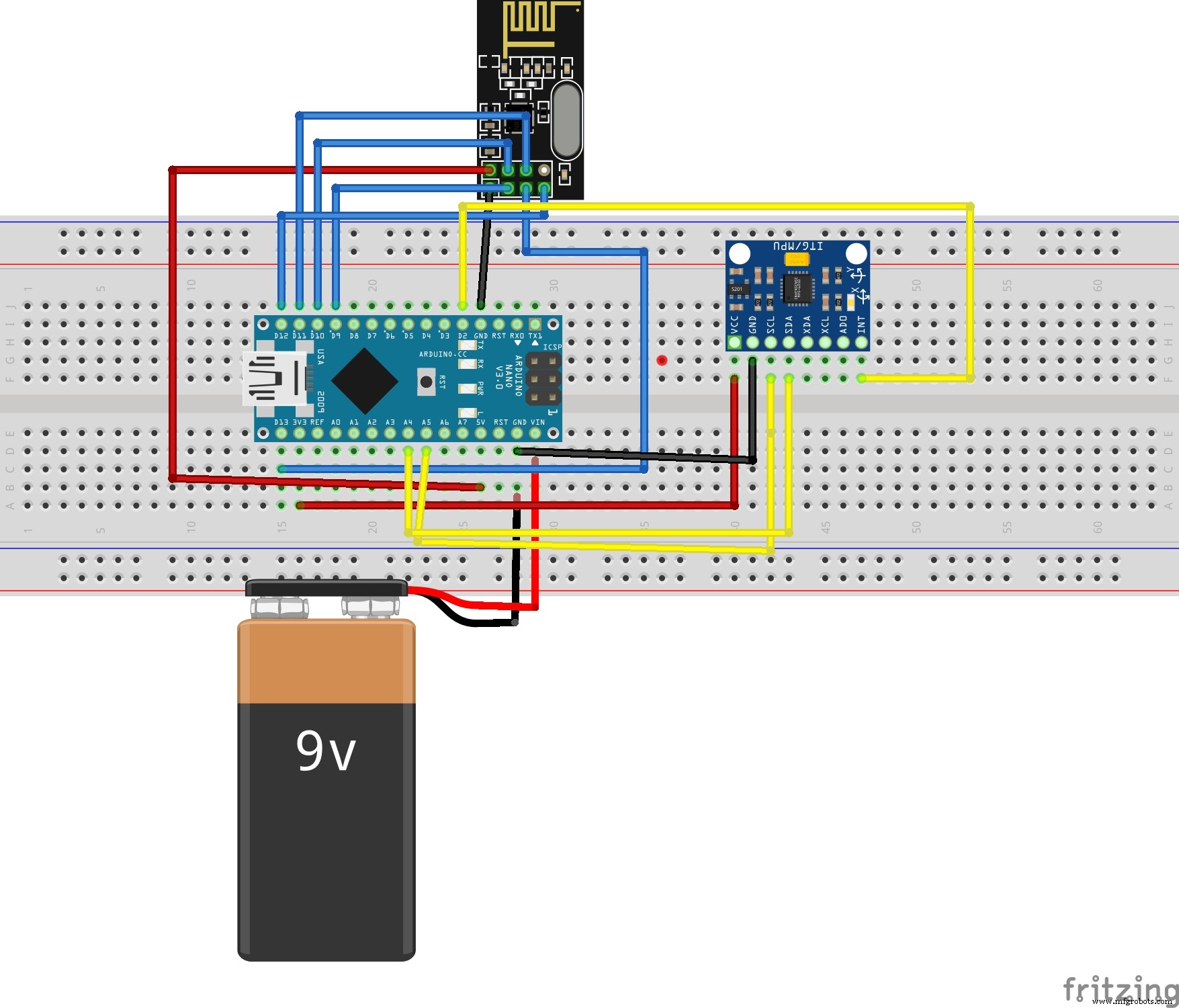
•Het doel van dit project is om een rolstoel te maken die door handgebaren wordt bestuurd en waarbij de versnellingsmeter als sensor wordt gebruikt om mensen met een lichamelijke beperking te helpen van de ene plaats naar de andere te gaan door simpelweg met de hand richting te geven.
•Vandaag de dag lijden in India veel mensen aan een handicap, er zijn mensen van wie de onderste helft van het lichaam verlamd is. Deze rolstoel zal bijdragen aan het comfort en het leven van mensen een beetje gemakkelijker maken
Code
ZendercodeArduino
#include //SPI-bibliotheek voor communicatie met de nRF24L01+#include "RF24.h" //De hoofdbibliotheek van de nRF24L01+#include "Wire.h" //Voor communiceren#include "I2Cdev. h" //Voor communicatie met MPU6050#include "MPU6050.h" //De hoofdbibliotheek van de MPU6050MPU6050 mpu;int16_t ax, ay, az;int16_t gx, gy, gz;int data[2];RF24 radio(9, 10); const uint64_t pipe =0xE8E8F0F0E1LL; ongeldige setup (void) {Serial.begin (9600); Draad.begin(); mpu.initialiseren(); // Initialiseer het MPU-object radio.begin(); // Start de nRF24 communiceren radio.openWritingPipe (pipe); // Stelt het adres in van de ontvanger waarnaar het programma gegevens zal sturen.}void loop(void){ mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); data[0] =kaart(ax, -17000, 17.000, 300, 400); //Stuur X-asgegevensgegevens [1] =kaart (ay, -17000, 17000, 100, 200); //Stuur Y-asgegevens radio.write(data, sizeof(data));}
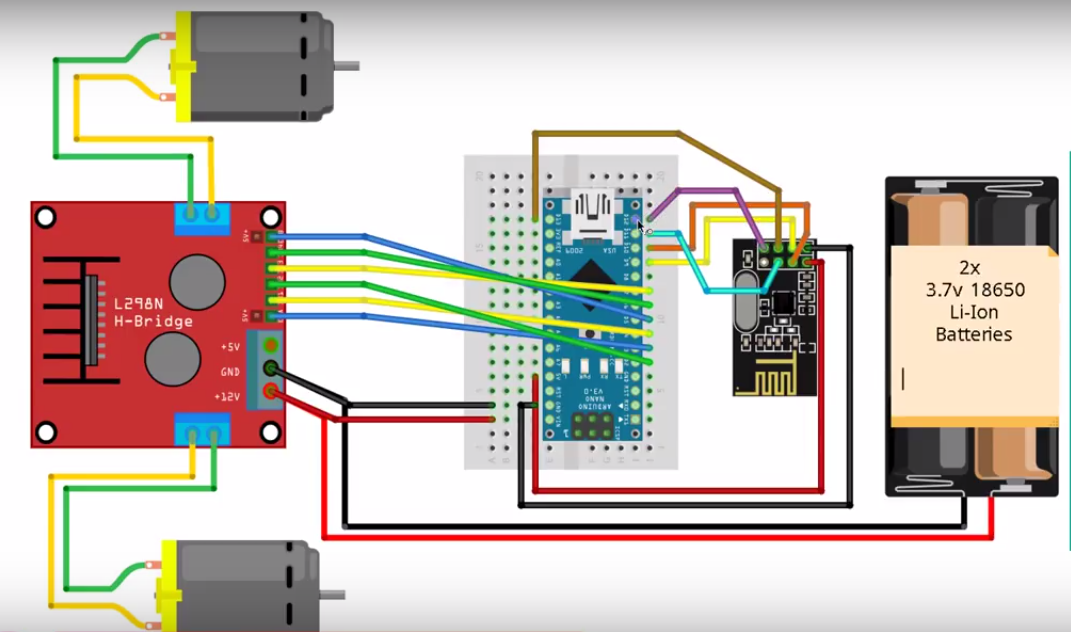
OntvangercodeArduino
#include #include #include #include #include //SPI-bibliotheek voor communicatie met de nRF24L01+#include " RF24.h" //De hoofdbibliotheek van de nRF24L01+const int enbA =3;const int enbB =5;const int IN1 =2; // Rechtermotor (-)const int IN2 =4; //Rechter Motor (+)const int IN3 =7; // Linkermotor (+) const int IN4 =6; //Right Motor (-)int RightSpd =130;int LeftSpd =130;int data[2];RF24 radio(9,10);const uint64_t pipe =0xE8E8F0F0E1LL;void setup() {//Definieer de motorpinnen als OUTPUT pinMode(enbA, UITGANG); pinMode(enbB, UITGANG); pinMode (IN1, UITGANG); pinMode (IN2, UITGANG); pinMode (IN3, UITGANG); pinMode (IN4, UITGANG); Serieel.begin(9600); radio.begin(); radio.openReadingPipe (1, pijp); radio.startListening(); }void loop(){ if (radio.available()){ radio.read(data, sizeof(data)); if (data [0]> 380) {//forward analogWrite (enbA, RightSpd); analogWrite(enbB, LeftSpd); digitalWrite (IN1, HOOG); digitalWrite (IN2, LAAG); digitalWrite(IN3, HOOG); digitalWrite (IN4, LAAG); } if(data[0] <310){ //backward analogWrite(enbA, RightSpd); analogWrite(enbB, LeftSpd); digitalWrite (IN1, LAAG); digitalWrite (IN2, HOOG); digitalWrite (IN3, LAAG); digitalWrite (IN4, HOOG); } if (data [1]> 180) { // left analogWrite (enbA, RightSpd); analogWrite(enbB, LeftSpd); digitalWrite (IN1, HOOG); digitalWrite (IN2, LAAG); digitalWrite (IN3, LAAG); digitalWrite (IN4, HOOG); } if(data[1] <110){ //right analogWrite(enbA, RightSpd); analogWrite(enbB, LeftSpd); digitalWrite (IN1, LAAG); digitalWrite (IN2, HOOG); digitalWrite(IN3, HOOG); digitalWrite (IN4, LAAG); } if(data[0]> 330 &&data[0] <360 &&data[1]> 130 &&data[1] <160){ //stop auto analogWrite(enbA, 0); analoogWrite(enbB, 0); } }}