


Arduino Nano:bedien 2 stappenmotoren met joystick
Componenten en benodigdheden
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
| × | 2 |
Apps en online services
 |
| |||
 |
|
Over dit project
Bij het bouwen van Arduino projecten met Stappenmotoren , zoals CNC machine, plotter , of Geanimeerde kunst , komt er een moment dat de steppers handmatig moeten worden aangestuurd. Analoge Joysticks zijn goedkope en gemakkelijke modules voor handmatige bediening, met variabele snelheid. Ze lijken een goede keuze te zijn om de steppers te besturen . Het probleem oplossen met traditionele Arduino code is echter niet triviaal.
In deze zelfstudie laat ik je zien hoe eenvoudig het is om Arduino Nano te programmeren met Visuino om 2 stappenmotoren te besturen met Joystick .
Stap 1:Componenten
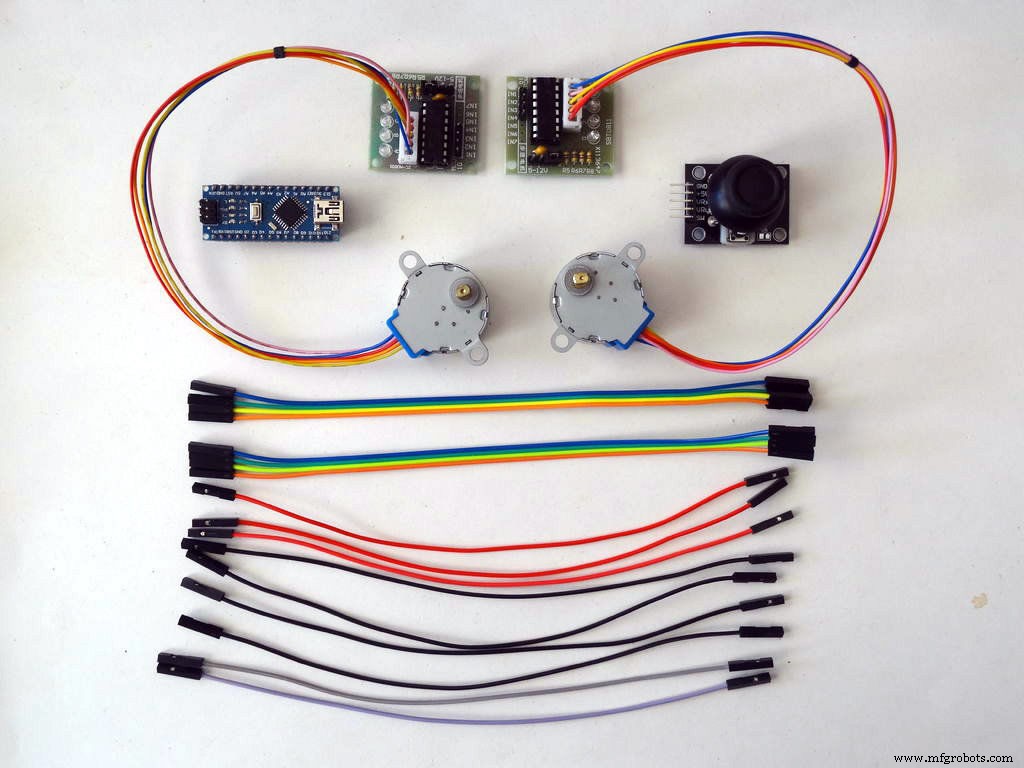
- Eén Arduino compatibel bord (ik gebruik Arduino Nano, omdat ik er een heb, maar elke andere is prima)
- Eén Joystick die ik kreeg van deze goedkope set van 37 sensoren
- Twee 5V stappenmotoren met Bestuurdersborden (Ik gebruikte 28BYJ-48 stepper met ULN2003 driver board)
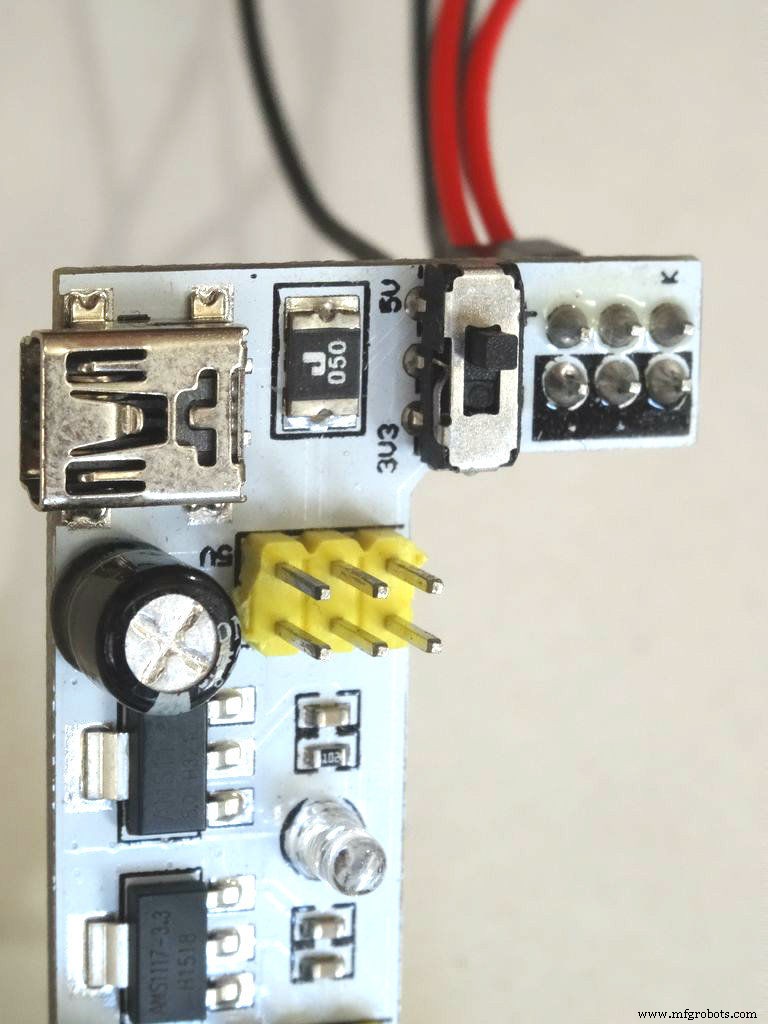
- Eén K2 Breadboard-voeding met adapter (Afbeelding 2 ), of een andere 5V stroombron voor de Steppers
- 17 Vrouw-Vrouw jumperdraden
Stap 2:Sluit de stroom aan en aard de stappenmotoren
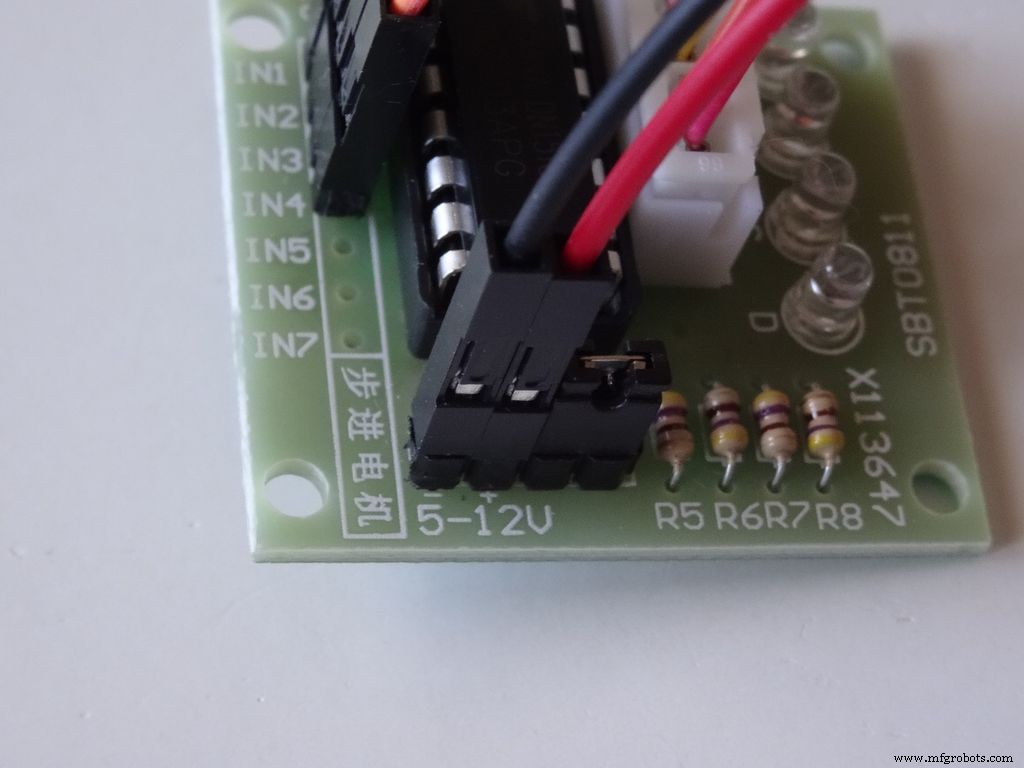

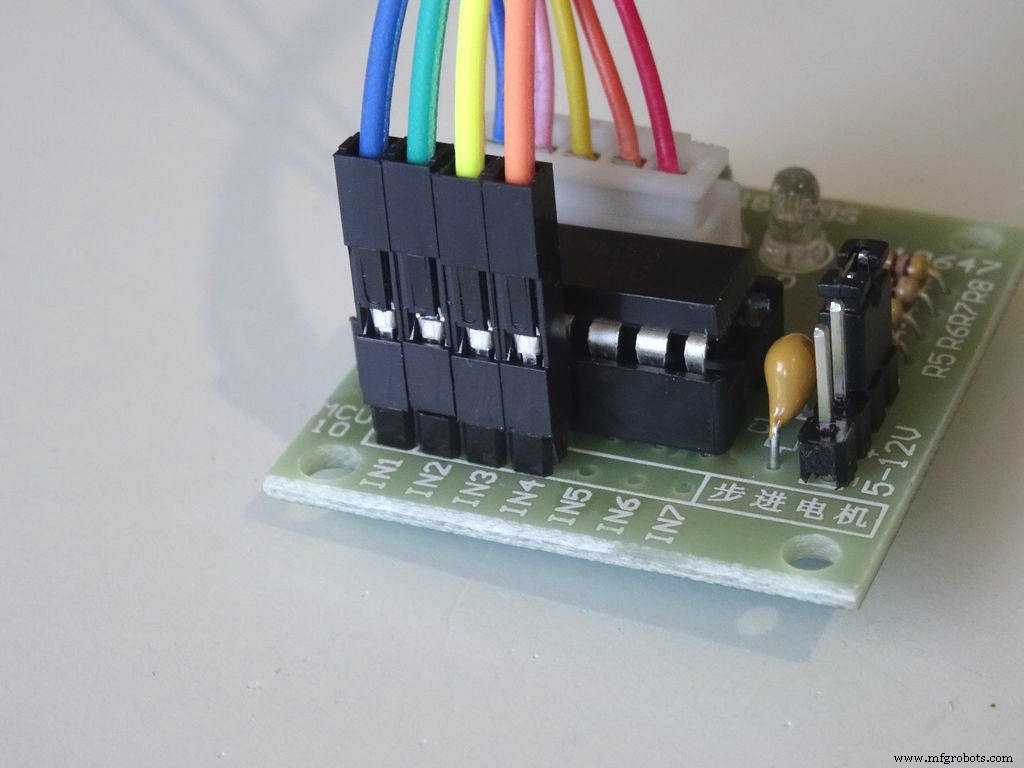
- Verbind Grond (Zwarte draad ), en Kracht (Rode draad ), naar elk van de Stepper Driver-modules (Afbeelding 1 )
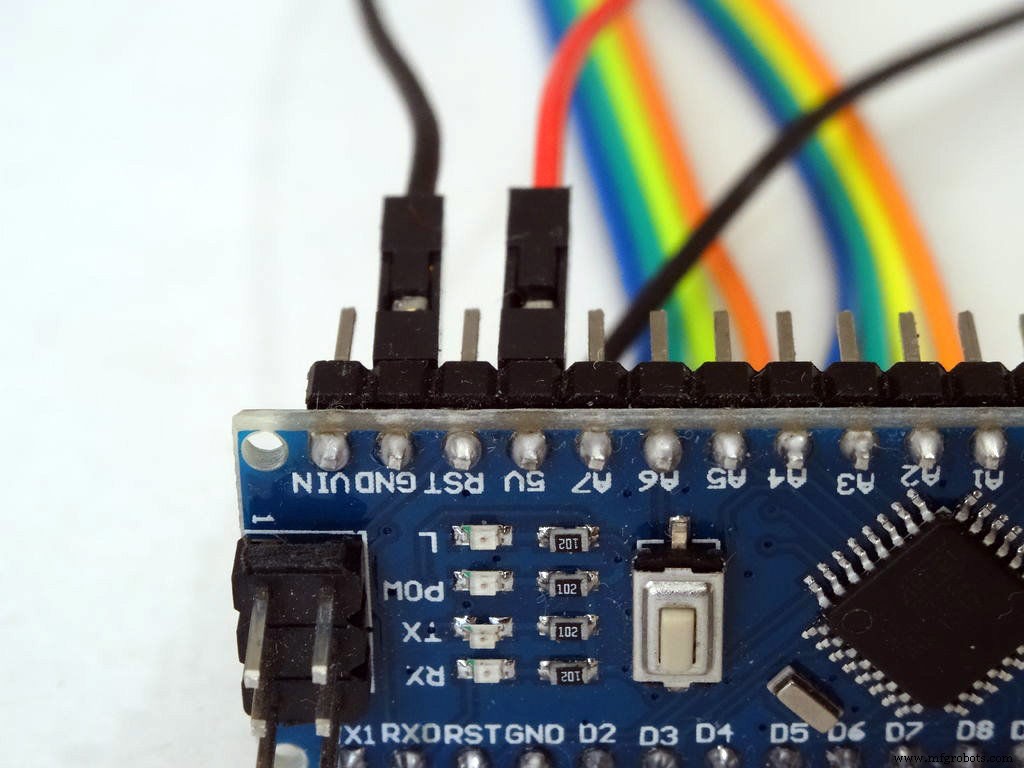
- Verbind nog een Grond (Zwarte draad ) naar Aarde speld van de Arduino bord (Afbeelding 2 )
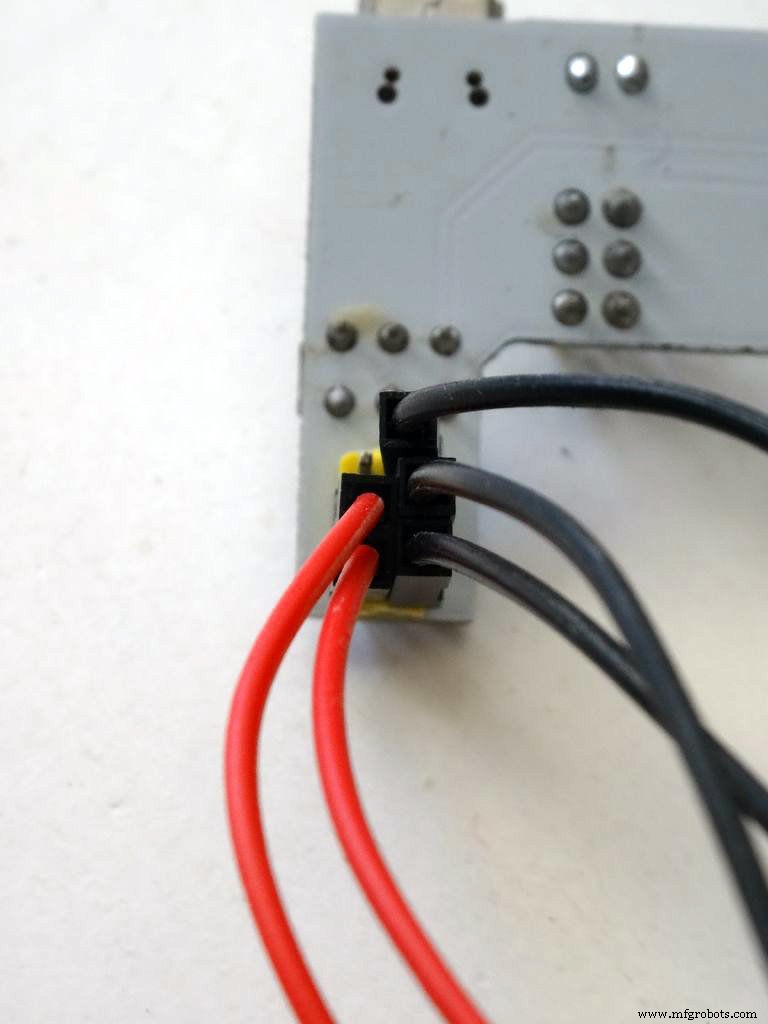
- Sluit het andere uiteinde van de Power . aan (Rode draden ) uit de Motor Driver-modules naar de "" Kracht pinnen van de K2 voeding (Afbeeldingen 3 en 4 )
- Verbind het andere uiteinde van de Aarde (Zwarte draden ) van de Motor Driver-modules en de Arduino naar de "- " Grond pinnen van de K2 voeding (Afbeeldingen 3 en 4 )
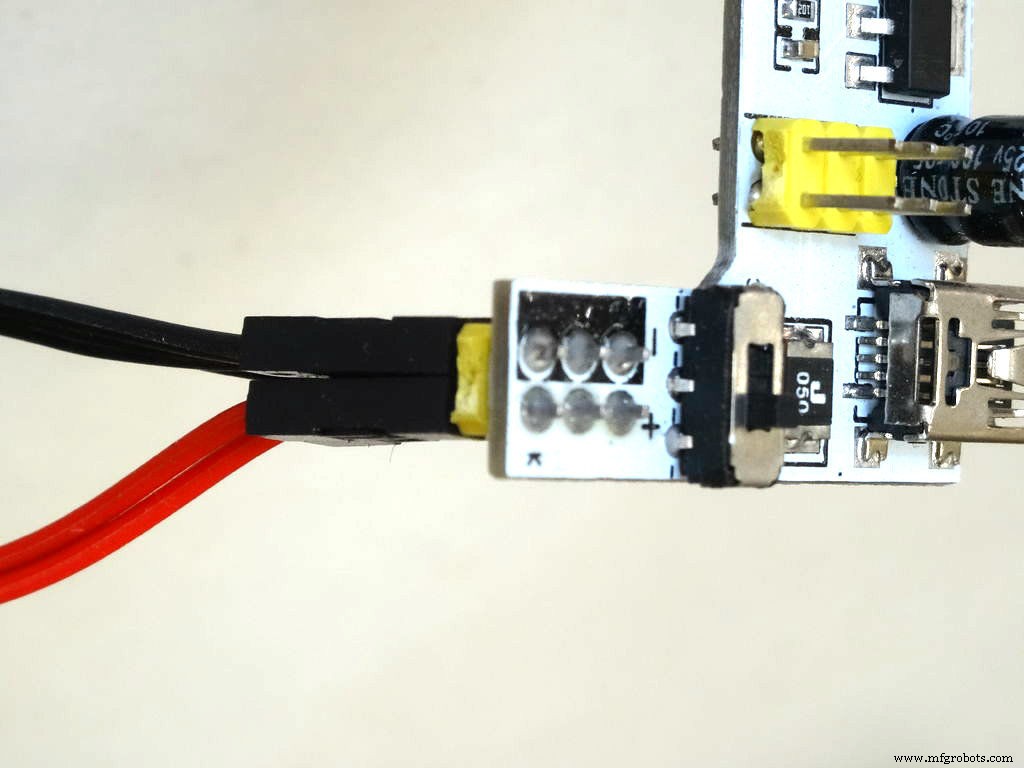
- Zorg ervoor dat de Power Selection Schakelaar van de K2 voeding is ingesteld op 5V (Afbeelding 5 )
- Afbeelding 6 laat zien waar de Grond . is speld van de Arduino Nano
Stap 3:Sluit de stappenmotoren aan op de Arduino

- Als deze nog niet zijn aangesloten, sluit u de connectoren van de stappenmotor aan op de driverkaarten
- Sluit het ene uiteinde van Vrouwelijke-Vrouwelijke jumperdraden aan (Blauwe, Groene, Gele en Oranje draden ) naar de IN1 tot IN4 pinnen van de Stepper Driver voor de Eerste Motor (Afbeelding 1 )
- Sluit het ene uiteinde van Vrouwelijke-Vrouwelijke jumperdraden aan (Blauwe, Groene, Gele en Oranje draden ) naar de IN1 tot IN4 pinnen van de Stepper Driver voor de Tweede Motor (Afbeelding 1 )
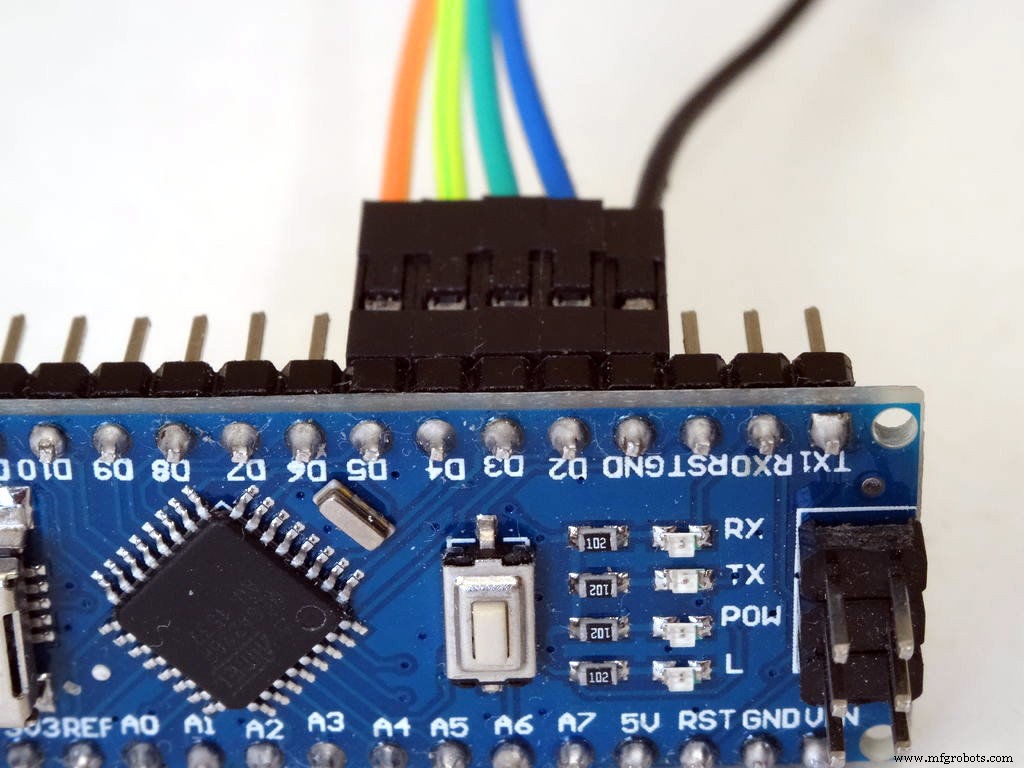
- Sluit de IN1-draad aan van de Eerste Motor (Blauwe draad ) naar de Digitale pin 2 van de Arduino bord (Afbeelding 2 )
- Sluit de IN2-draad . aan van de Eerste Motor (Groene draad ) naar de Digitale pin 3 van de Arduino bord (Afbeelding 2 )
- Sluit de IN3-draad . aan van de Eerste Motor (Gele draad ) naar de Digitale pin 4 van de Arduino bord (Afbeelding 2 )
- Sluit de IN4-draad aan van de Eerste Motor (Oranje draad ) naar de Digitale pin 5 van de Arduino bord (Afbeelding 2 )
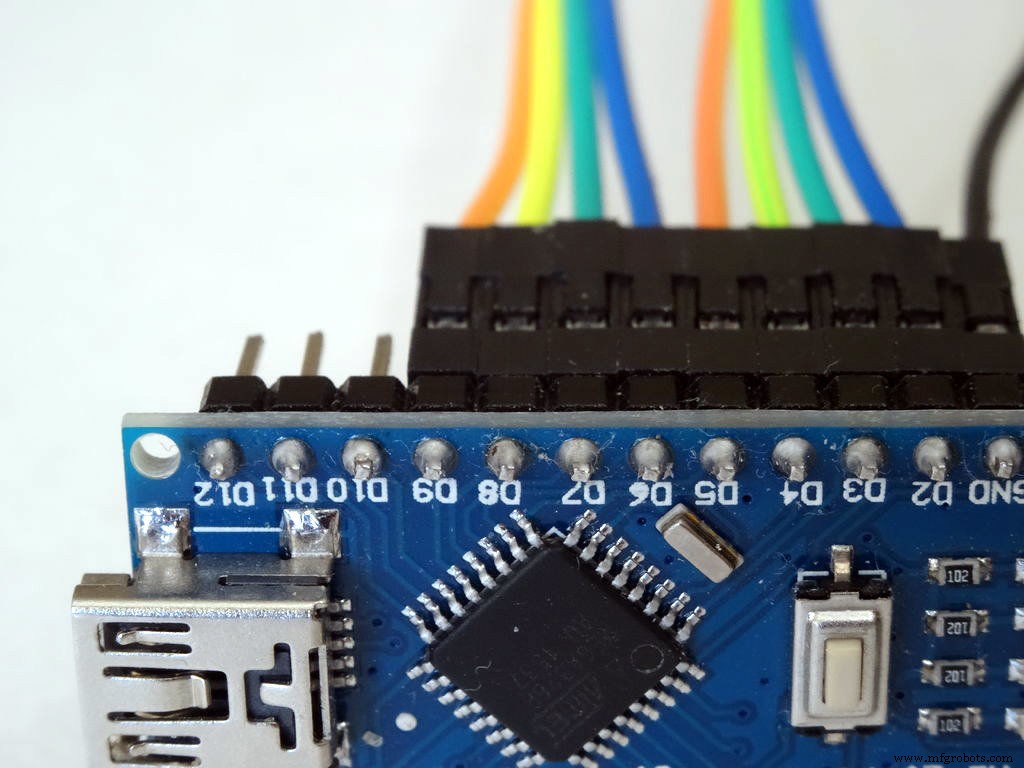
- Sluit de IN1-draad aan van de Tweede Motor (Blauwe draad ) naar de Digitale pin 6 van de Arduino bord (Afbeelding 3 )
- Sluit de IN2-draad . aan van de Tweede Motor (Groene draad ) naar de Digitale pin 7 van de Arduino bord (Afbeelding 3 )
- Sluit de IN3-draad . aan van de Tweede Motor (Gele draad ) naar de Digitale pin 8 van de Arduino bord (Afbeelding 3 )
- Sluit de IN4-draad aan van de Tweede Motor (Oranje draad ) naar de Digitale pin 9 van de Arduino bord (Afbeelding 3 )
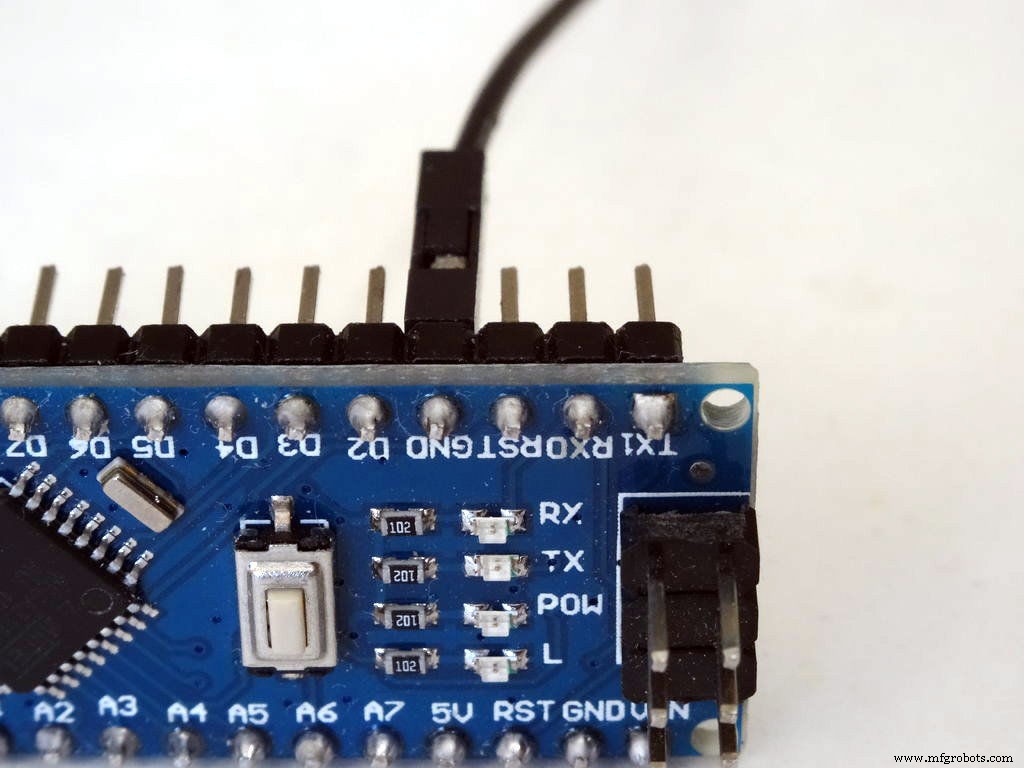
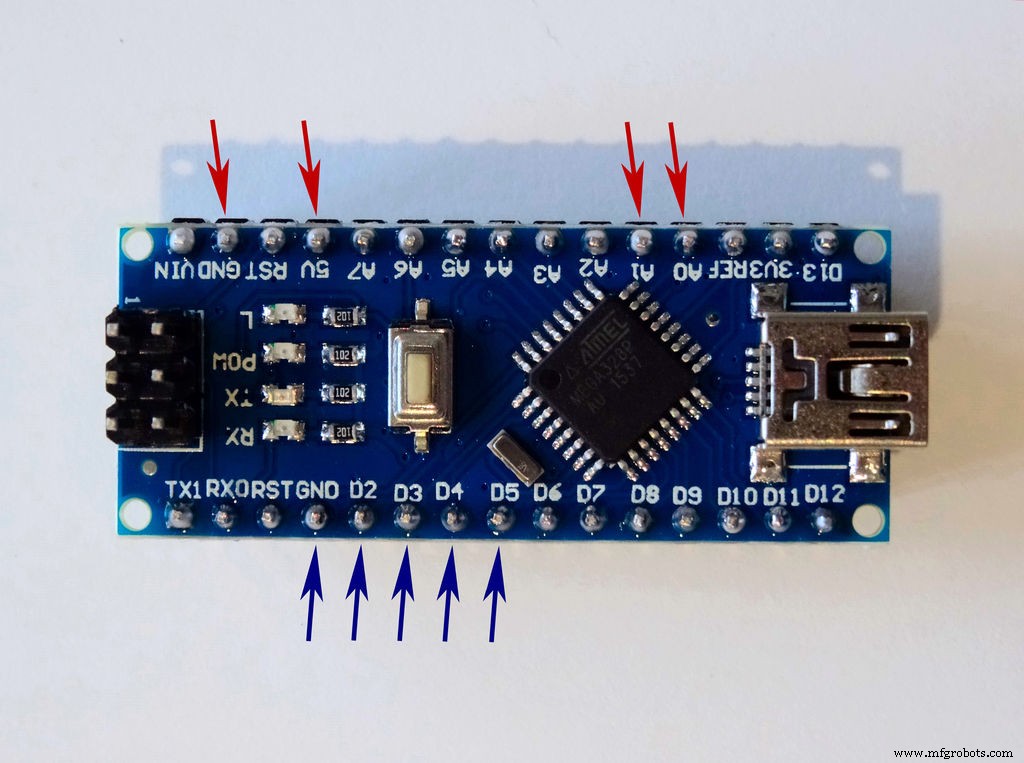
- Afbeelding 4 wordt weergegeven in Rood waar zijn de Digital 2 tot Digital 9 pinnen van de Arduino Nano. In blauw wordt de verbinding weergegeven die in de vorige stap is gemaakt.
Stap 4:Sluit de joystick aan op de Arduino
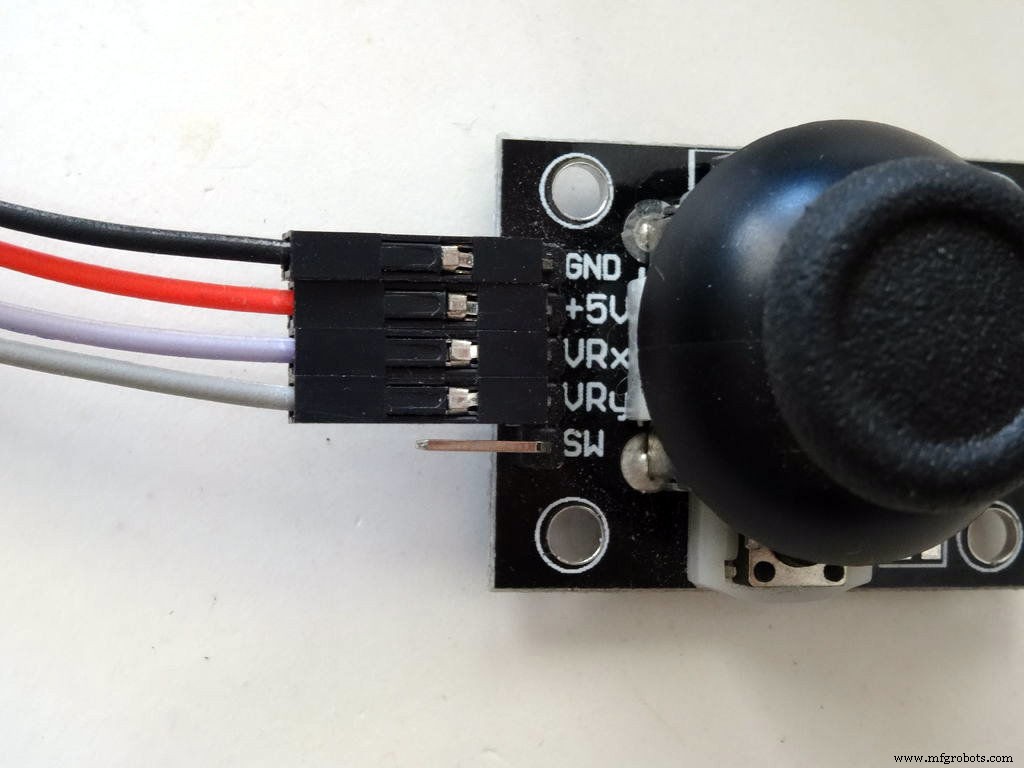
- Verbind Vrouw-Vrouw draden naar de aarde (Zwarte draad ), Kracht (Rode draad ), VRx (Paarse draad ), en VRy (Grijze draad ) van de Joystick zoals getoond in Afbeelding 1
- Verbind de aardingsdraad (Zwarte draad ) naar de Grond speld van de Arduino bord (Afbeelding 2 )
- Sluit de Voedingsdraad aan (Rode draad ) naar de 5V Power pin van de Arduino (Afbeelding 2 )
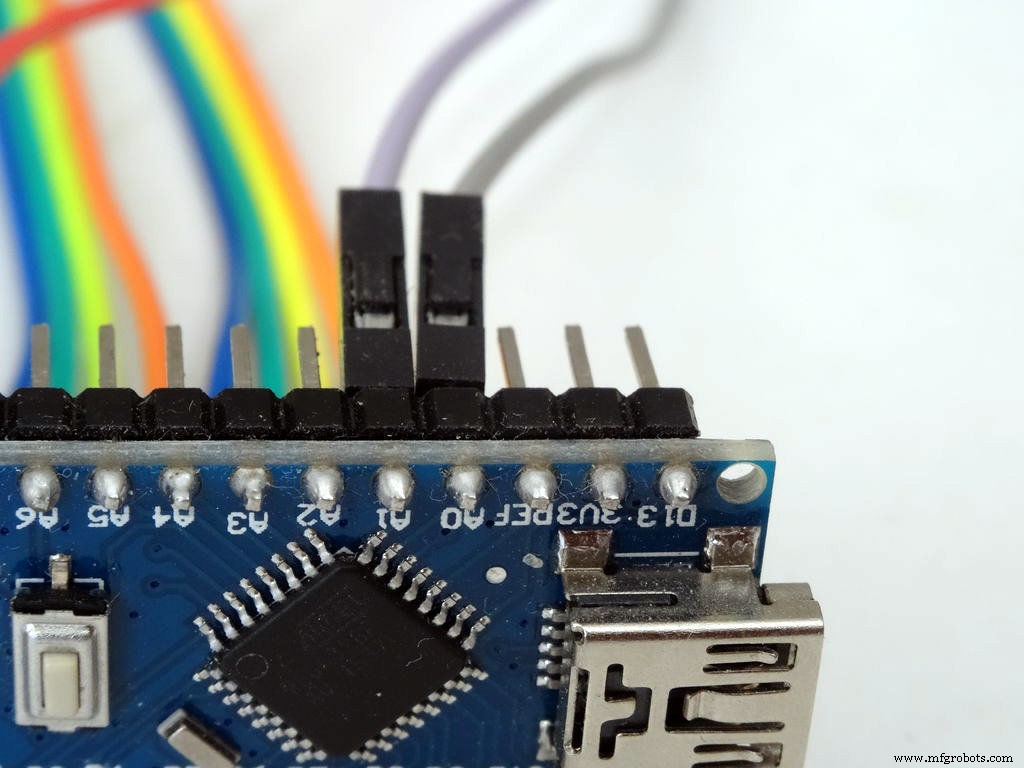
- Verbind de VRx-draad (Bruine draad ) de de Analoge 1 speld van de Arduino bord (Afbeelding 3 )
- Verbind de VRy-draad (Grijze draad ) de Analoge 0 speld van de Arduino bord (Afbeelding 3 )
- Afbeelding 4 wordt weergegeven in Rood waar zijn de Grond , 5V Vermogen, Analoog 0 , en Analoog 1 pinnen van de Arduino Nano. In blauw wordt de verbinding weergegeven die in de vorige stappen is gemaakt.
Stap 5:Start Visuino en selecteer het Arduino-bordtype
Om te beginnen met het programmeren van de Arduino, heb je de Arduino IDE . nodig geïnstalleerd vanaf hier:http://www.arduino.cc/ .
Zorg ervoor dat je 1.6.7 hoger installeert, anders werkt deze tutorial niet!
De Visuino :https://www.visuino.com moet ook worden geïnstalleerd.
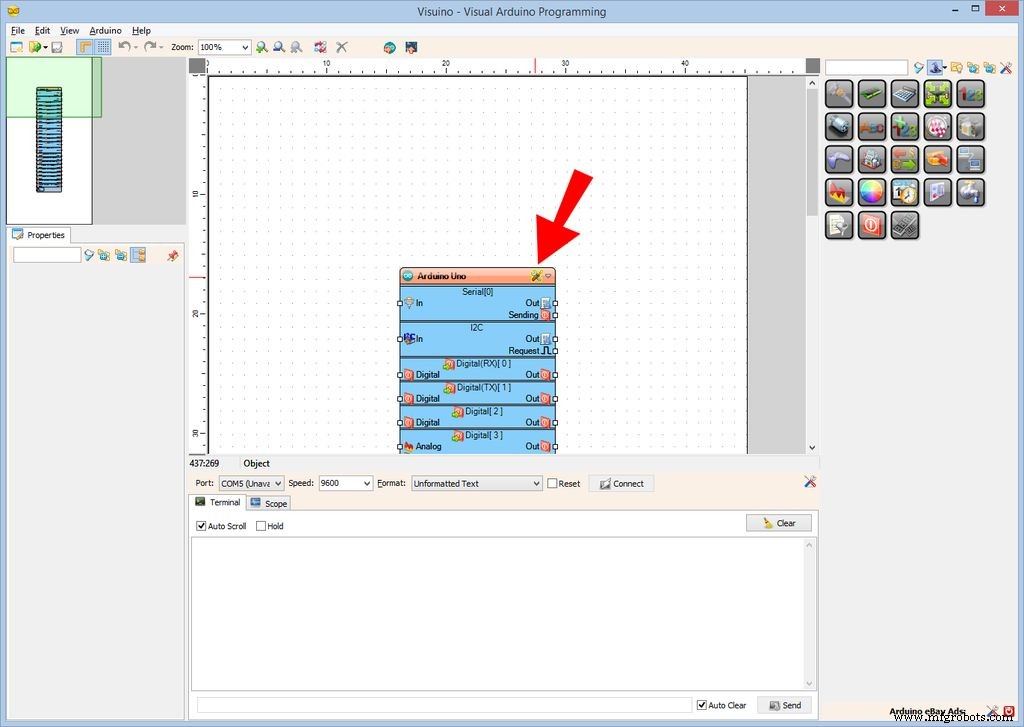
- Start Visuino zoals op de eerste foto
- Klik op de "Extra " knop op de Arduino-component (Afbeelding 1 ) in Visuino
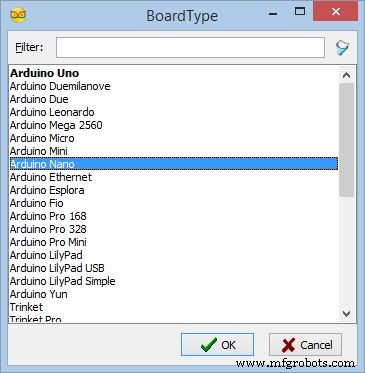
- Als het dialoogvenster verschijnt, selecteert u Arduino Nano zoals getoond in Afbeelding 2
Stap 6:In Visuino:Stappenmotorcomponenten toevoegen en aansluiten

Eerst moeten we componenten toevoegen om de stappenmotoren te besturen:
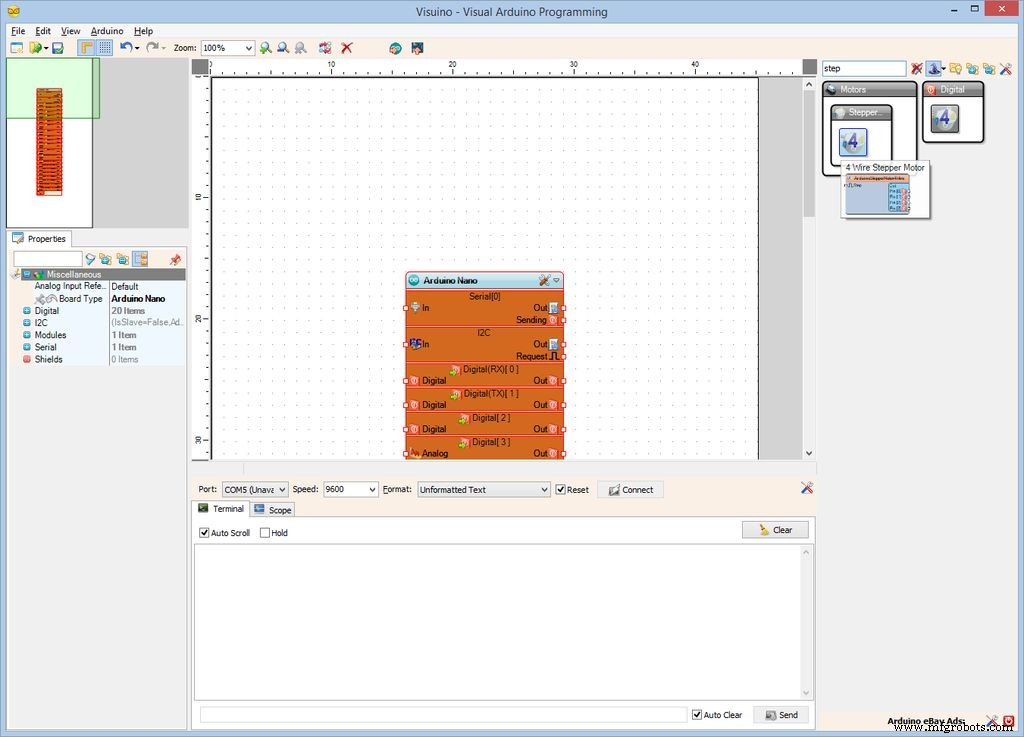
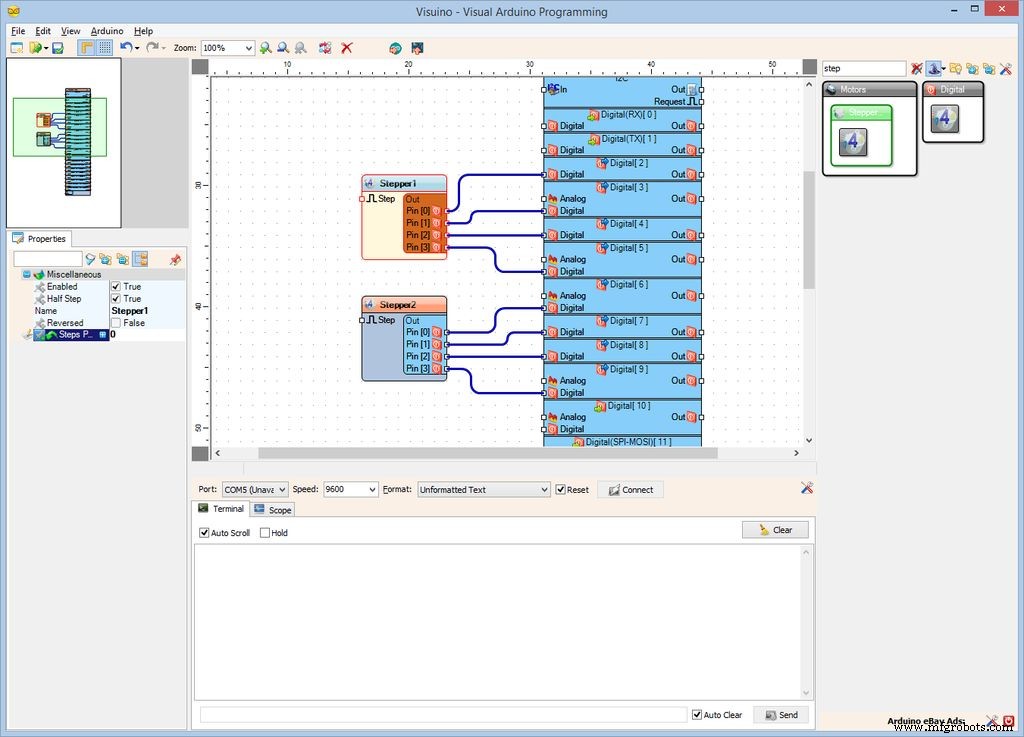
- Typ "stap " in het filtervak van de Component Toolbox selecteer vervolgens de "4-draads stappenmotor " component (Afbeelding 1 ), en laat twee van hen vallen het in het ontwerpgebied
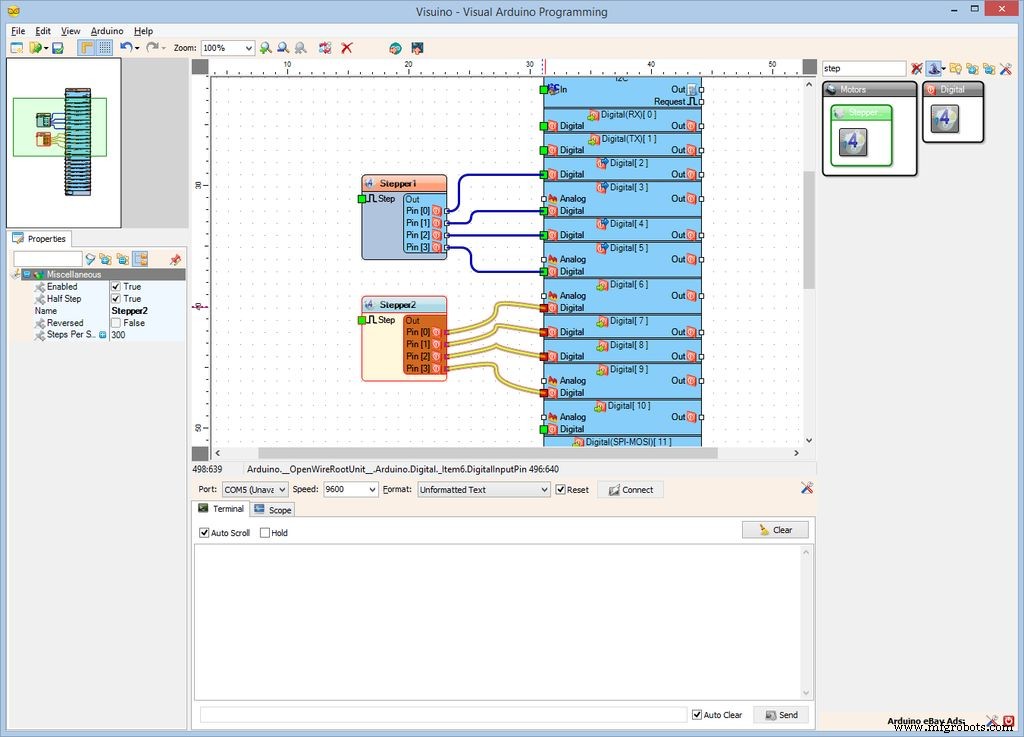
- Klik in de "Uit " doos met de pinnen van de Stepper1 component om alle Out-pinnen tegelijk te verbinden (Afbeelding 2 )
- Beweeg de muis over de "Digitale " invoerpin van de "Digitale[ 2 ] " kanaal van de Arduino onderdeel. De Visuino spreidt automatisch de draden zodat ze correct worden aangesloten op de rest van de pinnen (Afbeelding 2 )
- Klik in de "Uit " doos met de pinnen van de Stepper2 component om alle Out-pinnen tegelijk aan te sluiten (Afbeelding 3 )
- Beweeg de muis over de "Digitale " invoerpin van de "Digitale[ 6 ] " kanaal van de Arduino onderdeel. De Visuino spreidt automatisch de draden zodat ze correct worden aangesloten op de rest van de pinnen (Afbeelding 3 )
Stap 7:In Visuino:stel de eigenschappen van de stappenmotorcomponent in en voeg pinnen toe om de snelheid te regelen
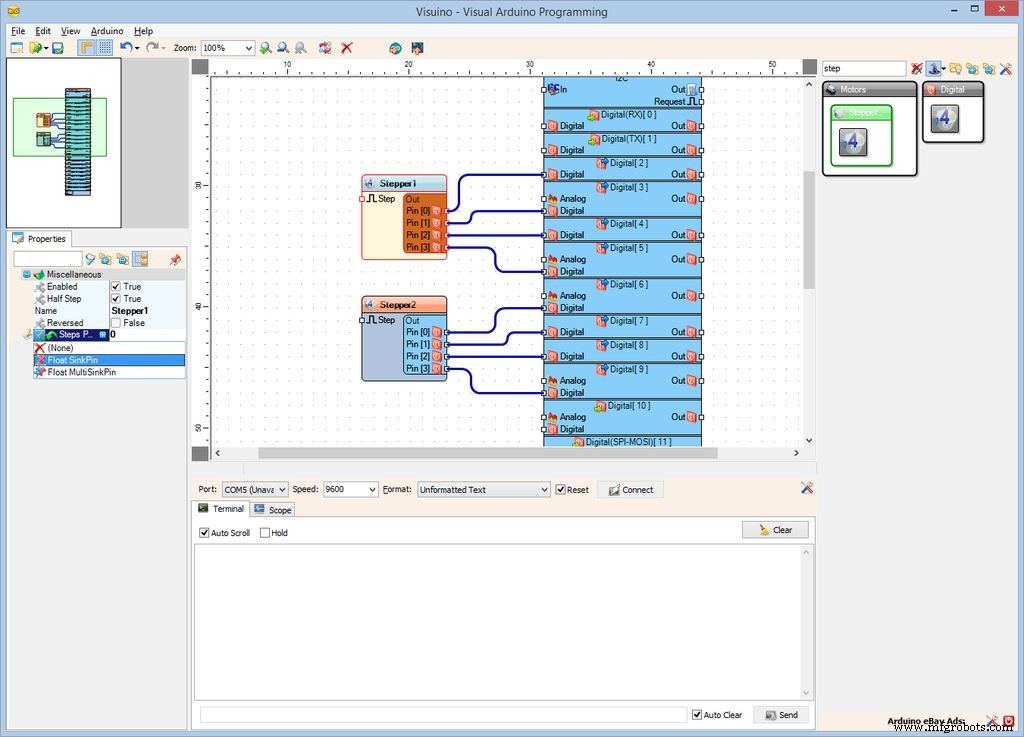
Omdat we de snelheid van de steppers willen regelen, moeten we pinnen toevoegen aan de eigenschap "Steps Per Second":
- Selecteer de Stepper1 component (Afbeelding 1 )
- Stel in de Object Inspector de waarde in van de "Steps Per Second " eigenschap naar "0 " (Afbeelding 1 )
- Klik in de Object Inspector op de Pin knop aan de voorkant van de "Steps Per Second " en selecteer "Float SinkPin " (Afbeelding 2 )
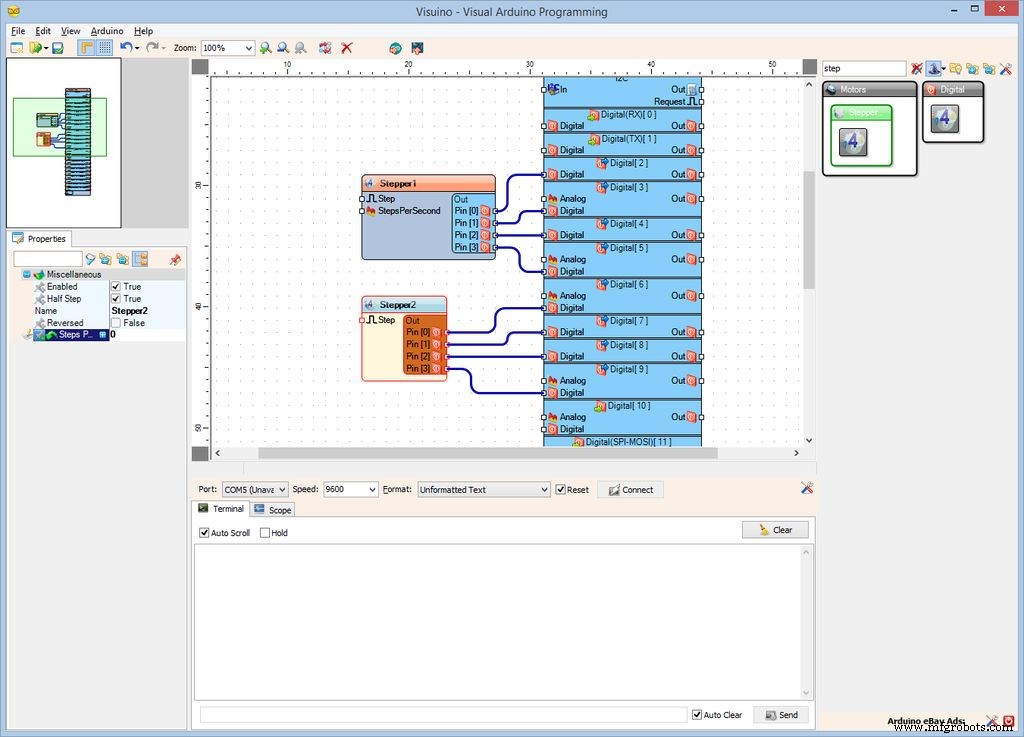
- Selecteer de Stepper2 component (Afbeelding 3 )
- Stel in de Object Inspector de waarde in van de "Steps Per Second " eigenschap naar "0 " (Afbeelding 3 )
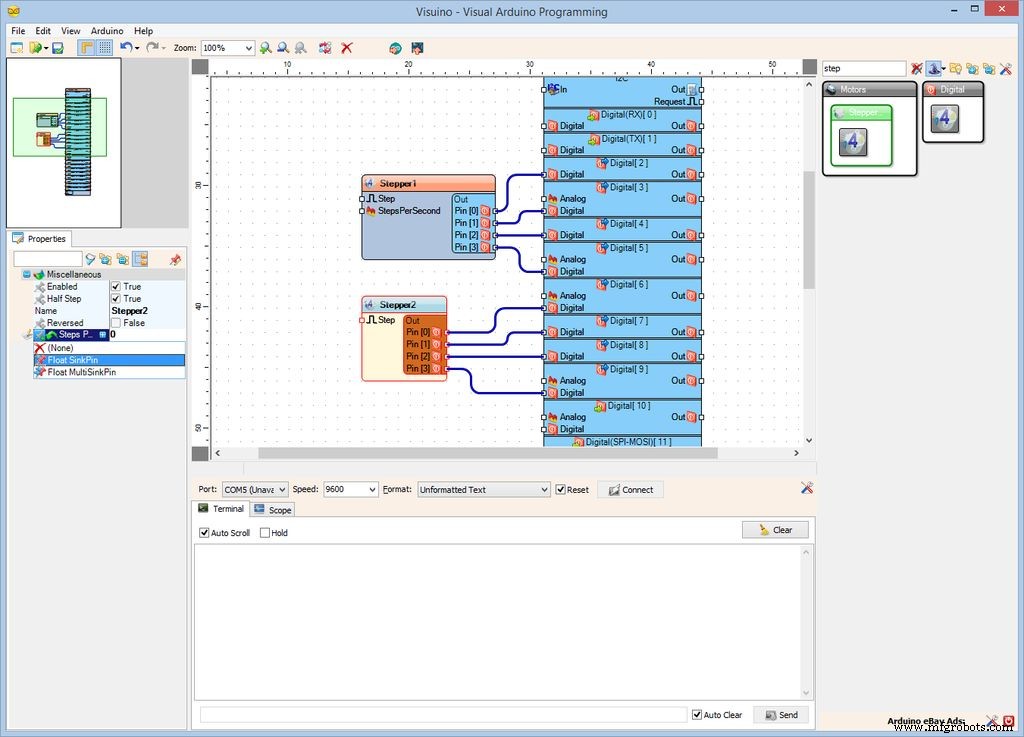
- Klik in de Object Inspector op de Pin knop aan de voorkant van de "Steps Per Second " en selecteer "Float SinkPin " (Afbeelding 4 )
Stap 8:In Visuino:dode zone geschaalde analoge componenten toevoegen en aansluiten
De analoge pinnen waarop de joystick is aangesloten, genereren genormaliseerde waarden tussen 0,0 en 1,0. We moeten ze omrekenen naar +/-300 stappen per seconde. Aangezien de joystick niet erg nauwkeurig is wanneer deze in de middenpositie is losgelaten, willen we dat een kleine zone rond het midden als 0,5 wordt beschouwd, dus moeten we "Dode zone" introduceren:
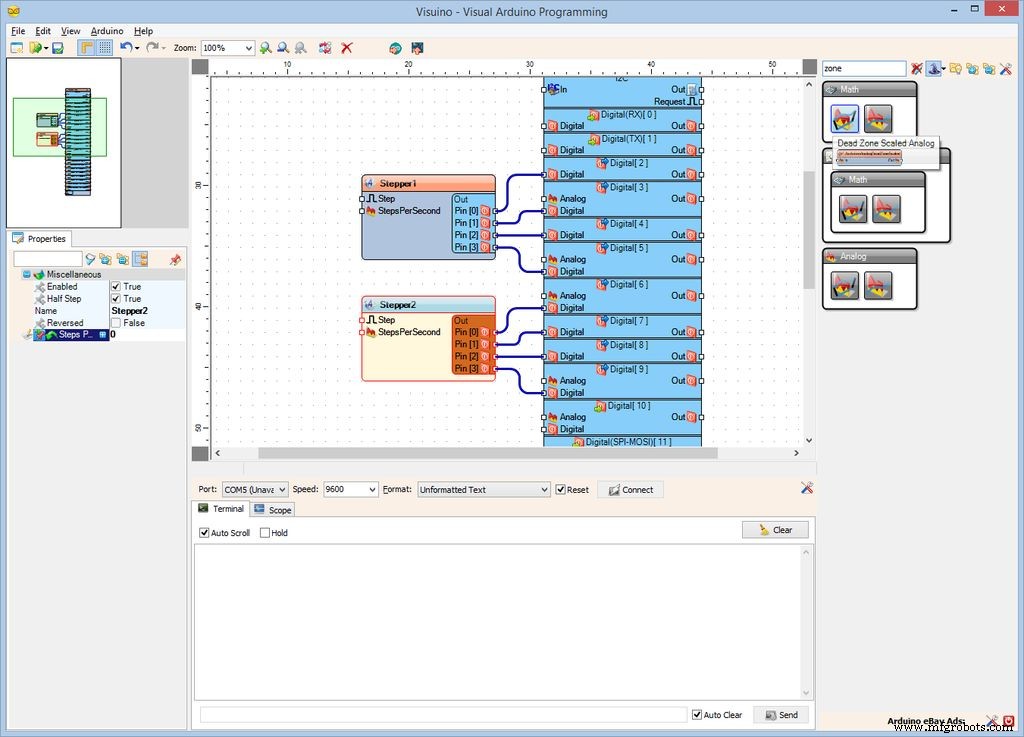
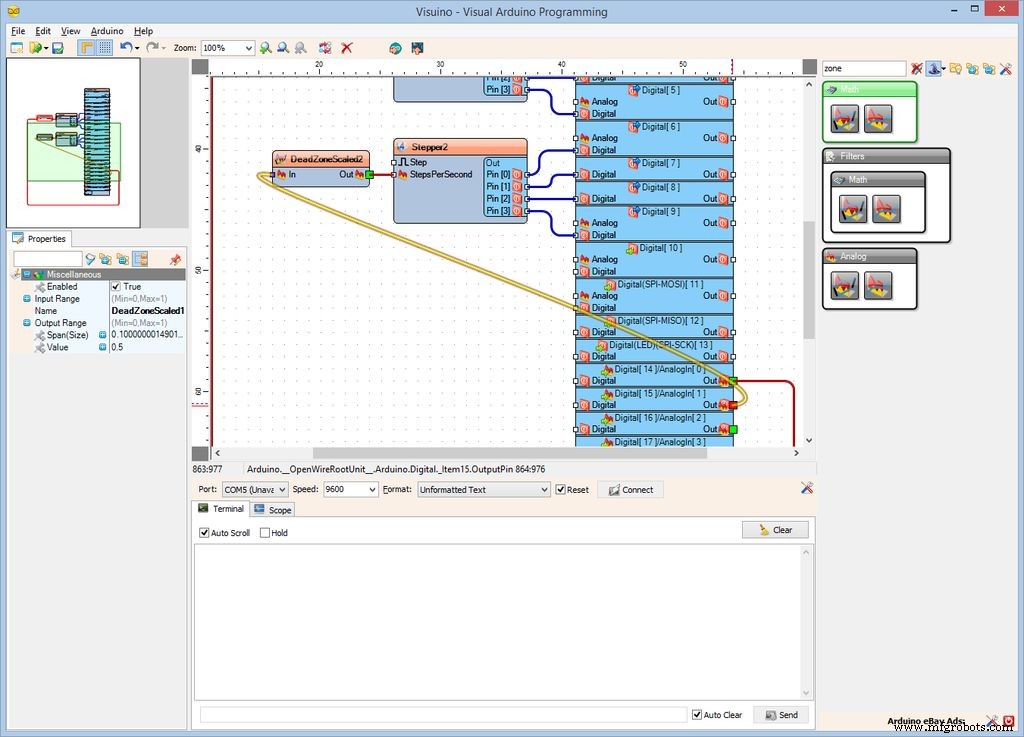
- Typ "zone " in het filtervak van de Component Toolbox en selecteer vervolgens de "Dead Zone Scaled Analog " component (Afbeelding 1 ), en laat twee van hen vallen het in het ontwerpgebied
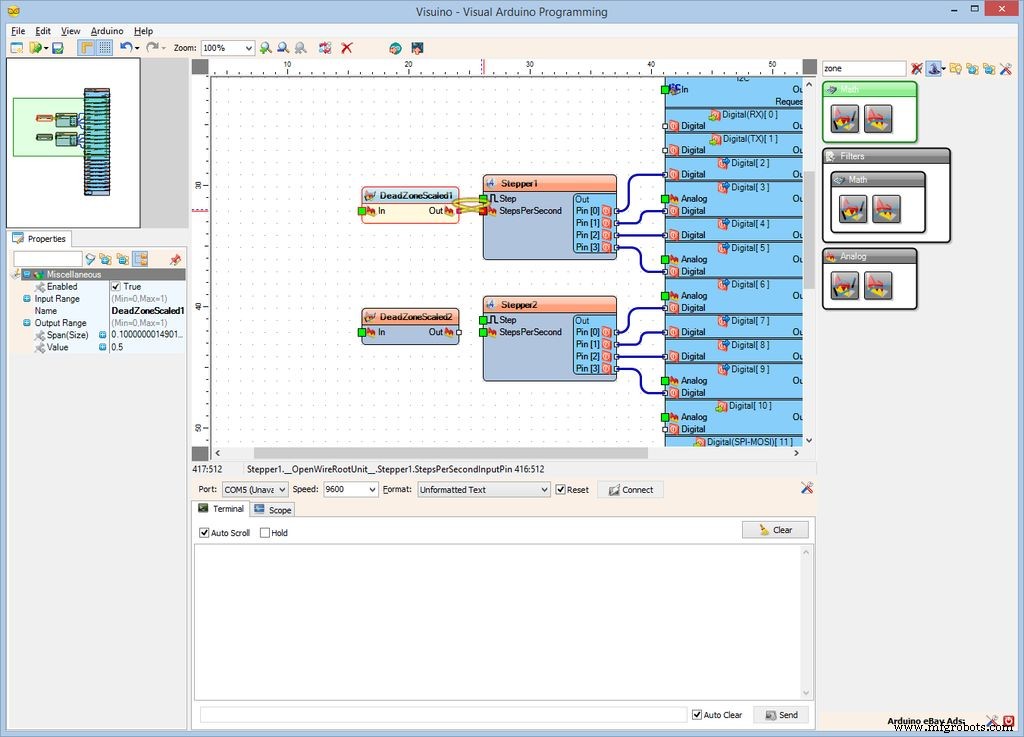
- Sluit de "Out . aan " uitvoerpin van de DeadZoneScaled1 component naar de "StepsPerSecond " invoerpin van de Stepper1 component (Afbeelding 2 )
- Sluit de "Out . aan " uitgangspin van de "Digitale [ 14 ]/Analoge [ 0 ] " kanaal van de Arduino component naar de "In " invoerpin van de DeadZoneScaled1 component (Afbeelding 3 )
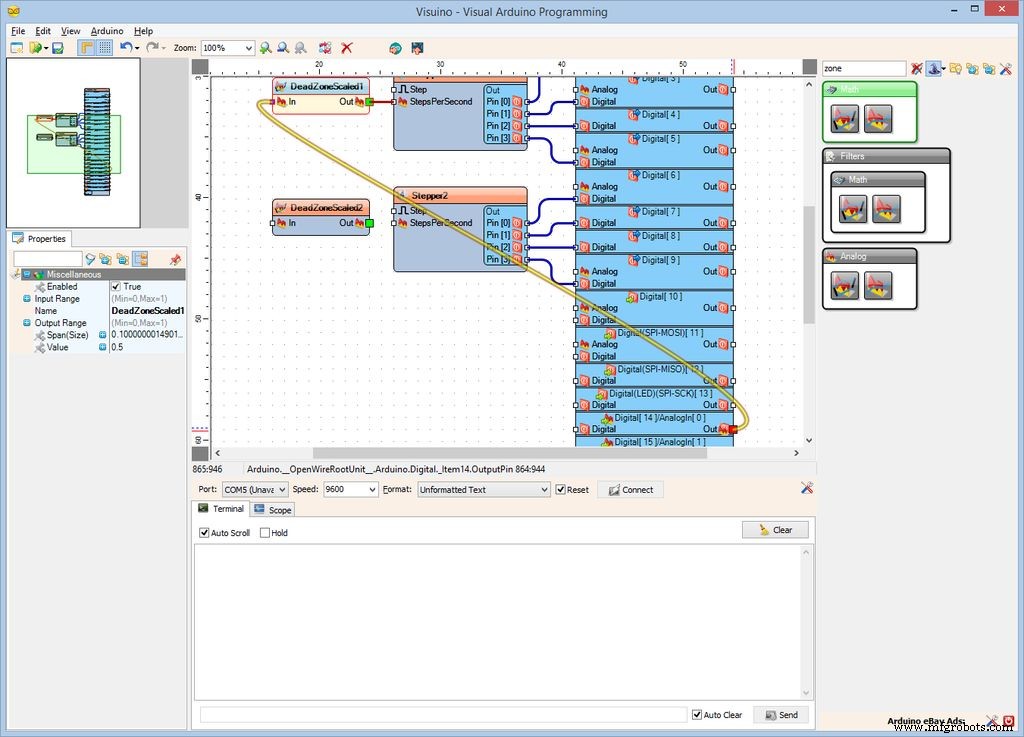
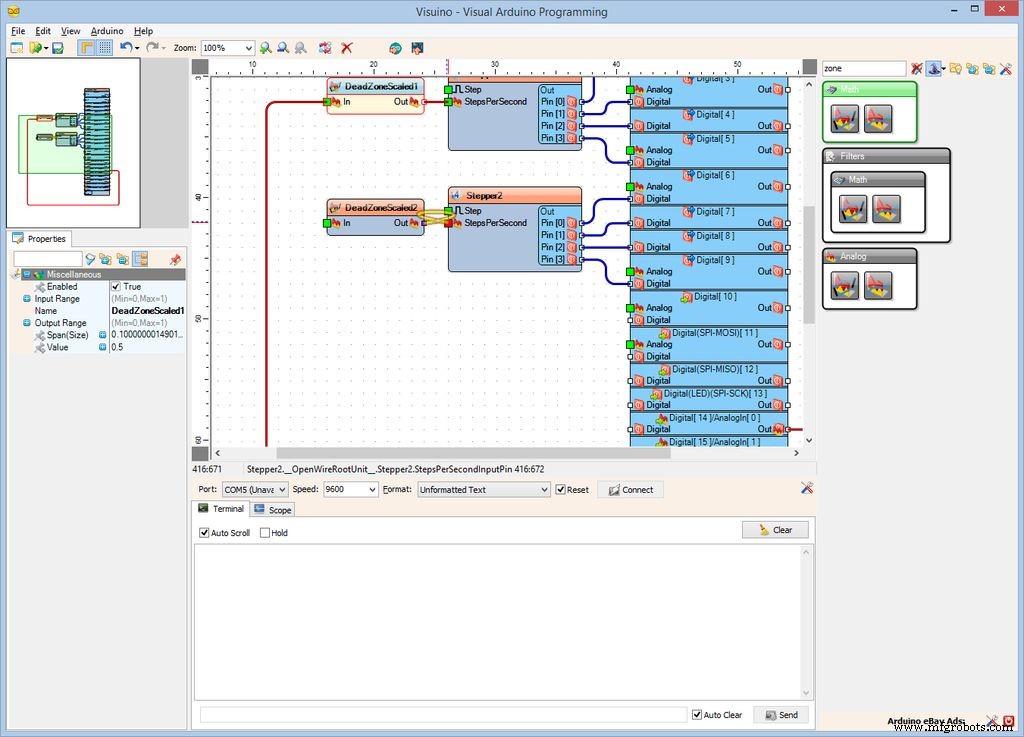
- Sluit de "Out . aan " uitvoerpin van de DeadZoneScaled2 component naar de "StepsPerSecond " invoerpin van de Stepper2 component (Afbeelding 4 )
- Sluit de "Out . aan " uitgangspin van de "Digitale[ 15 ]/Analoge[ 1 ] " kanaal van de Arduino component naar de "In " invoerpin van de DeadZoneScaled2 component (Afbeelding 5 )
Stap 9:In Visuino:stel de eigenschappen van de Dead Zone Scaled Analog-componenten in
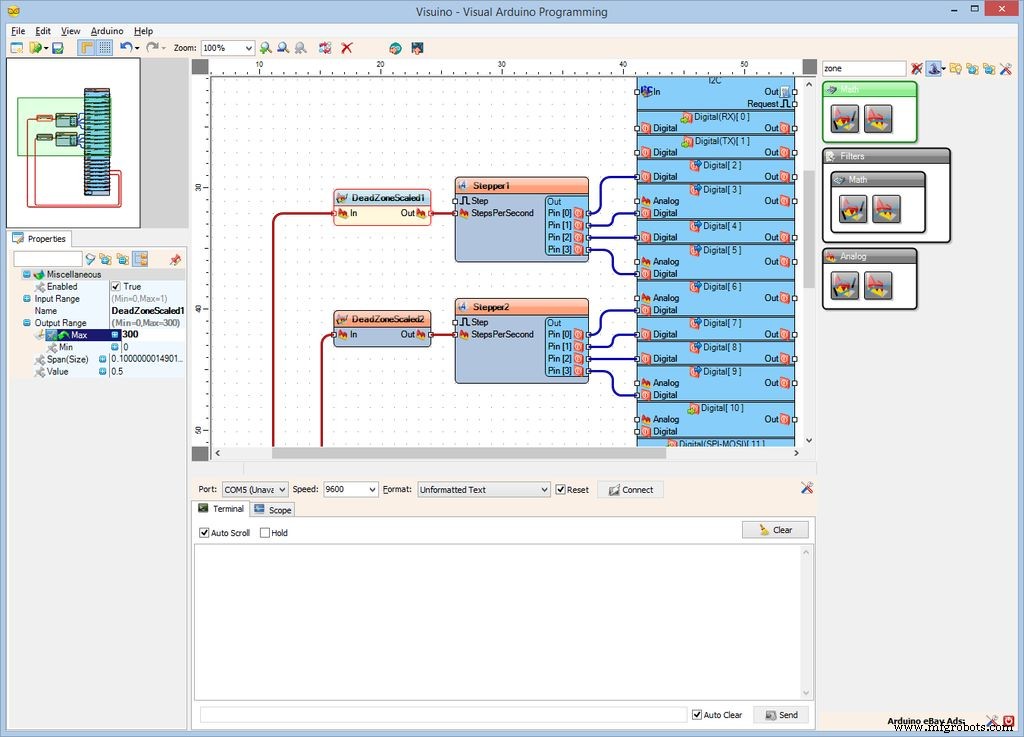
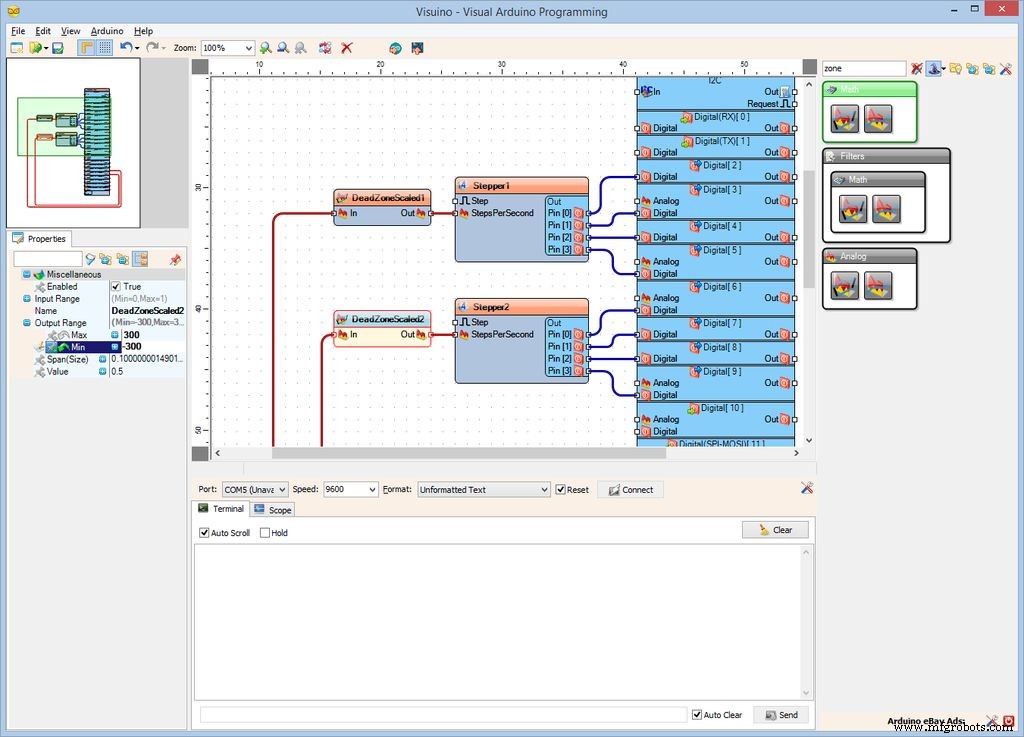
- Selecteer in het ontwerpgebied de DeadZoneScaled1 component (Afbeelding 1 )
- Breid in de Object Inspector het "Uitvoerbereik . uit " eigendom (Afbeelding 1 )
- Stel in de Object Inspector de waarde van de "Max . in " sub-eigenschap van de "Uitvoerbereik " eigendom naar "300 " (Afbeelding 1 )
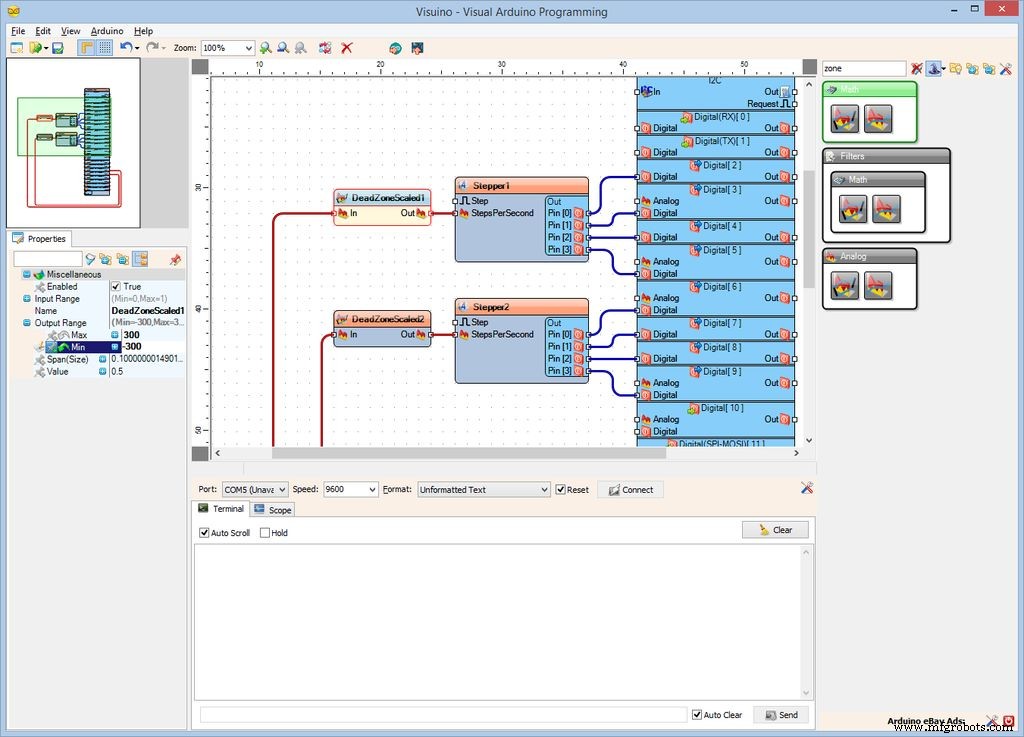
- Stel in de Object Inspector de waarde van de "Min . in " sub-eigenschap van de "Uitvoerbereik " eigendom naar "-300 " (Afbeelding 2 )
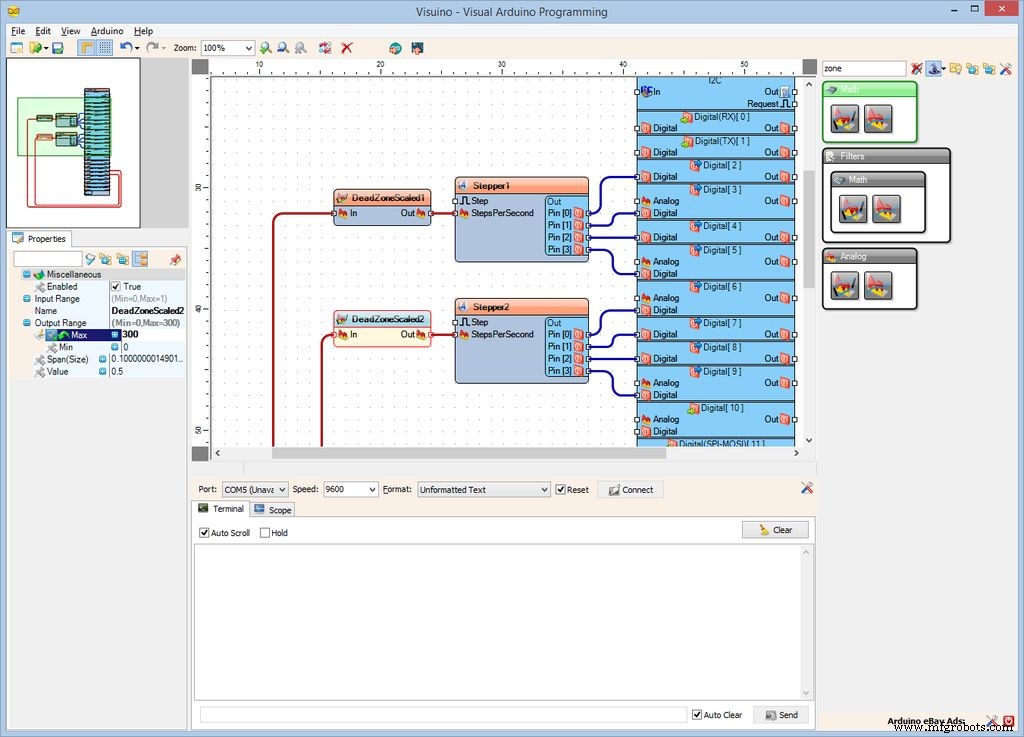
- Selecteer in het ontwerpgebied de DeadZoneScaled2 component (Afbeelding 3 )
- Breid in de Object Inspector het "Uitvoerbereik . uit " eigendom (Afbeelding 3 )
- Stel in de Object Inspector de waarde van de "Max . in " sub-eigenschap van de "Uitvoerbereik " eigendom naar "300 " (Afbeelding 3 )
- Stel in de Object Inspector de waarde van de "Min . in " sub-eigenschap van de "Uitvoerbereik " eigendom naar "-300 " (Afbeelding 4 )
Stap 10:Genereer, compileer en upload de Arduino-code
- In Visuino , Druk op F9 of klik op de knop die wordt weergegeven op Afbeelding 1 om de Arduino-code te genereren en de Arduino IDE te openen
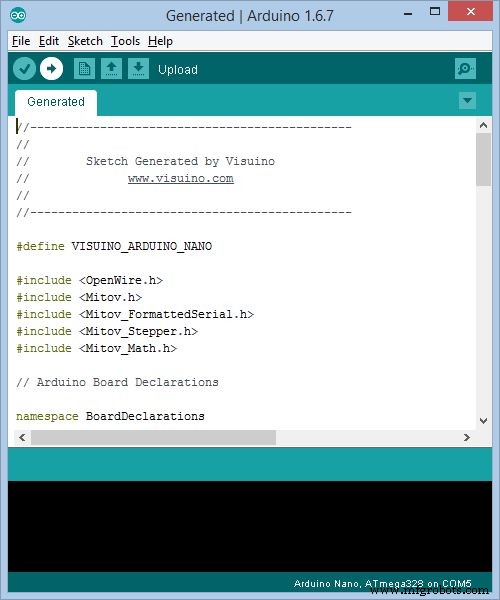
- In de Arduino IDE , klik op de Uploaden knop, om de code te compileren en te uploaden (Afbeelding 2 )
Stap 11:En speel...

Gefeliciteerd! Je hebt het project voltooid.
Afbeelding 1 en de Video laat het aangesloten en ingeschakelde project zien.
U kunt de Stappen . besturen met de Joystick zoals gezien de Video . De Joystick omhoog bewegen en Omlaag bestuurt de Vooruit en Achteruit rotatie van een van de Stappen . De Joystick naar links bewegen en Juist bestuurt de andere Stepper .
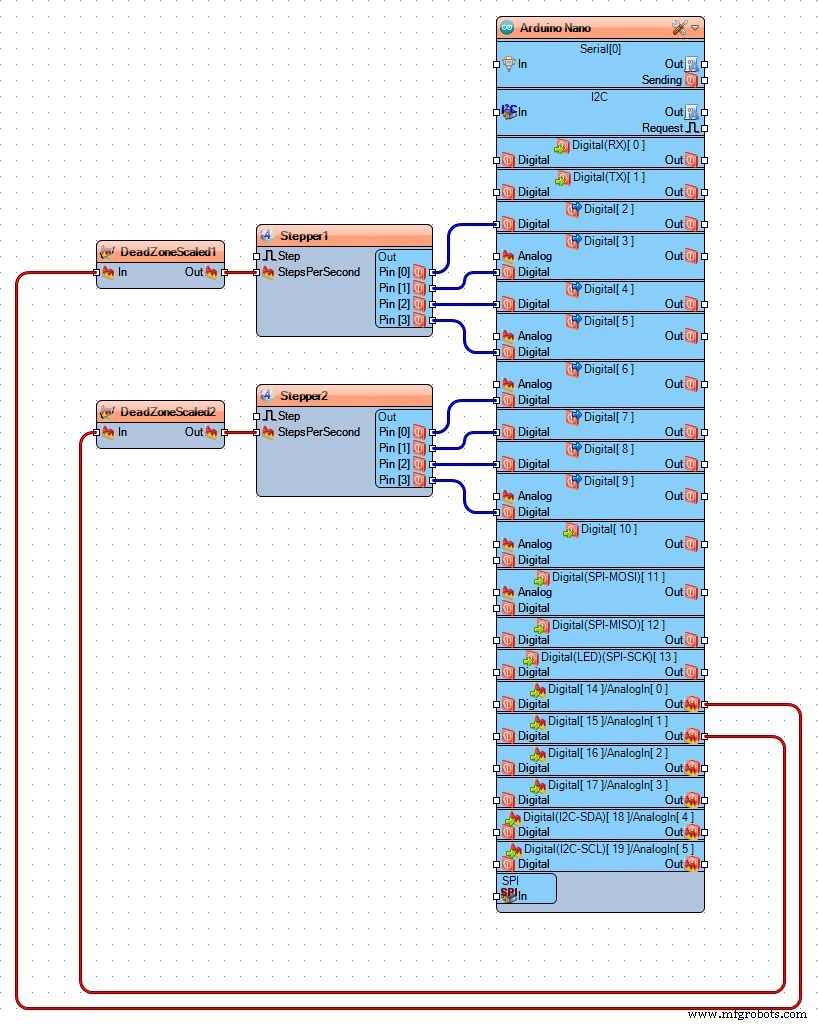
Op Afbeelding 2 je kunt de volledige Visuino . zien diagram.
Ook bijgevoegd is de Visuino project, dat ik voor deze zelfstudie heb gemaakt. Je kunt het downloaden en openen in Visuino :https://www.visuino.com
FQM7EG7IPOA2W5T.zip
Productieproces
- Bedien muntvangers met Arduino
- Arduino met Bluetooth om een LED te bedienen!
- De gezondheid van planten bepalen met TinyML
- Handheld geigerteller met Arduino Nano
- ThimbleKrox - Muisbediening met je vingers
- Arduino-joystick
- Bedien een kakkerlak met Arduino voor minder dan $30
- Autobesturing met Arduino Uno en Bluetooth
- Bedien de Arduino-robotarm met Android-app
- Maak een eetrobot met Arduino Nano | Gouden schroef
- 25 kHz 4-pins PWM-ventilatorregeling met Arduino Uno