


Hoe heeft technologie de fabricage van robots veranderd
Inleiding:waarschuwing:u kunt zich hier OUD door voelen
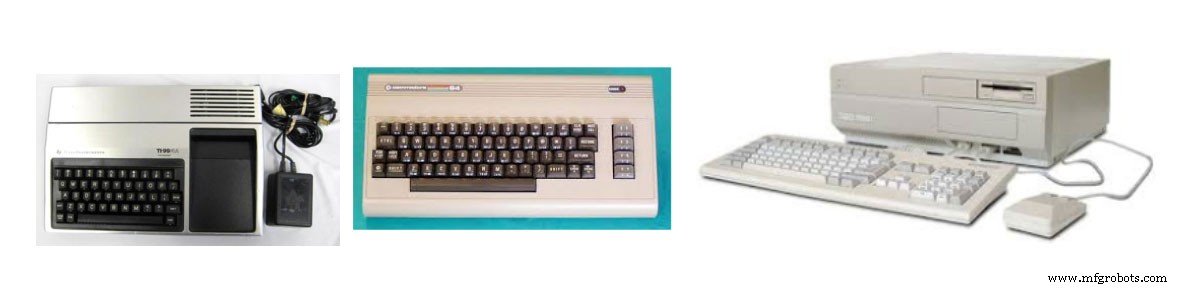
Mijn naam is Steve Spano, mijn eerste elektronicaproject was het verbinden van een batterij, twee draden en een zaklamp toen ik 4 jaar oud was. Van mijn 6e tot mijn 16e leerde ik mezelf verschillende programmeertalen (assembly, basic en zelfs C) op computers zoals de Texas Instruments TI-994A, Commodore C64, Amiga 2000 en IBM 386. Ik bouwde ook verschillende Heathkits elektronische projecten zoals de "Solid State" radio-ontvangerkit. Hoeveel van jullie hebben zelfs gehoord van Heathkit?

Ik wilde de Heathkit HERO 1-robot echt hebben, hij was verbazingwekkend geavanceerd met zijn ultrasone objectdetectie, beweegbare arm en 8-bits centrale verwerkingseenheid. Het werd zelfs geleverd met een radiografische afstandsbediening, zodat je het direct in Hexadecimal Assembly kon programmeren! Kunt u zich voorstellen? Direct hexadecimaal programmeren met een toetsenbord en helemaal geen debugger? De horror! Verbazingwekkend genoeg verkoopt deze kleine robot nog steeds voor $ 1500 US op Ebay. Ik zou er een moeten kopen - ik heb er altijd al een willen hebben - en het is zo schattig!

Jarenlang, vóór het internet, als je je zo'n tijd kunt voorstellen, heb ik zelfs een "BBS"-service uitgevoerd op een 9600 baud-modem genaamd de "Inter-Dimension", waar we berichten en Commodore/Amiga-soŌware uitwisselden. Mijn computerdroom destijds was om $ 2000 dollar te sparen (een fantastisch enorm bedrag in 1995 voor een 16-jarige) om een 10 Megabyte harde schijf te kopen voor mijn Amiga 2000. Als ik die harde schijf had kunnen hebben, Ik zou de beste op modem gebaseerde BBS hebben gehad!
Ik ben opgegroeid in Scranton, Pennsylvania (Verenigde Staten) en ging naar school voor Elektrotechniek (University of Scranton) en behaalde een Masters Degree in EE met een concentratie in controlesystemen van de State University of New York. Mijn eerste baan EE-baan na school was het ontwerpen van hardware voor thermische printers die worden gebruikt in kassa's en in de detailhandel. Het belangrijkste project bij mijn eerste EE-baan, in 1998, was om de producten van het bedrijf te helpen updaten van hun 8-bits Intel CPU naar een gloednieuwe 32-bits 50 MHz-processor met een 16-bits geheugenbus. Het was een groot project met teams voor software, hardware en werktuigbouwkunde. Mijn tweede EE-baan was werken voor een bedrijf dat storage area network-systemen ontwierp. Dit was in 2001 en het grote project voor dit bedrijf was om te helpen bij het ontwerpen van een reeks SAN-systemen die de gloednieuwe 2 Gbit/s Fibre Channel-interface ondersteunen. Dit was echt snel, 2Gbit/s op glasvezel in 2001! Hoe kan technologie nog beter worden dan dat??
Senior Project 1997
Ik ontdekte de ElectronicsLovers-pagina op Instagram en de beheerders waren op zoek naar "Senior Project" -papieren om op hun pagina te markeren. Er was geen datum gespecificeerd, dus ik dacht dat ik mijn laatste jaarpapier van de universiteit uit 1997 zou indienen, meestal als een leuke herinnering aan hoe technologie is veranderd.
Toen ik in 1997 mijn BSEE-diploma aan de Universiteit van Scranton afrondde, was ons laatste jaarproject het ontwerpen van een autonome robot die door een doolhof kon navigeren. Ik dacht meteen aan de Heathkit HERO1; nu kon ik proberen er een op school te bouwen en een veel geavanceerdere robot. De Heathkit HERO1 was tenslotte gebaseerd op slechts een Motorola 6808 8-bit CPU met 4 KB RAM (zijbalk:de typische PCI-Express 1G-netwerkkaarten van vandaag hebben een buffer van 64 KB tot 256 KB, alleen voor pakketgegevens).
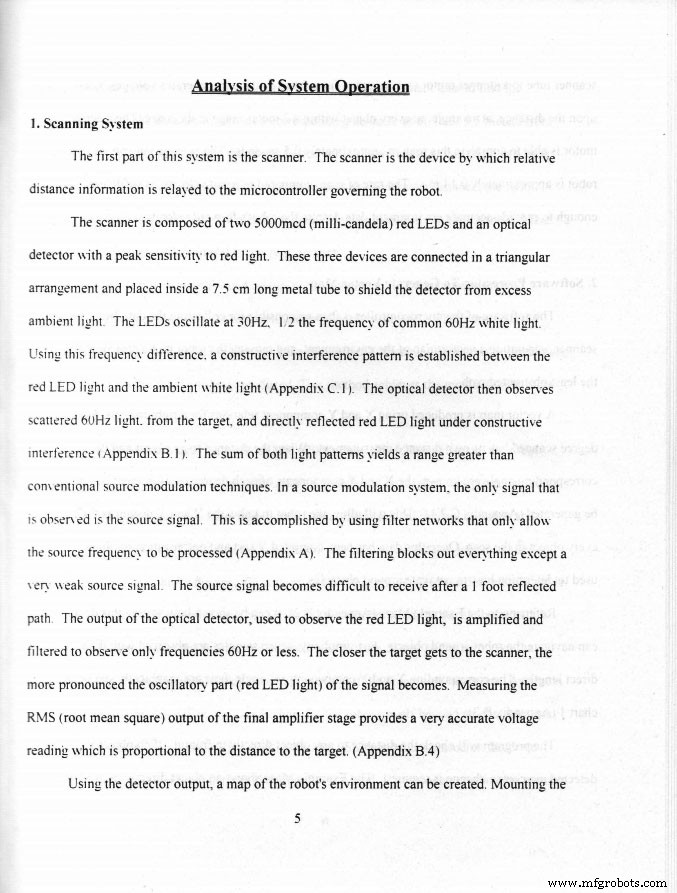
De ontwerparchitectuur voor mijn robot gebruikte een veel geavanceerdere Intel 87x196KC. Dit was een 16-bits CPU die 32 KB intern EEPROM-geheugen voor programmaopslag leverde, maar het leverde slechts een totaal RAM-geheugen van 512 bytes. De "C"-compiler genereerde zeer niet-geoptimaliseerde code waardoor het beheren van de stapel op 512 bytes een grote uitdaging was, en er was helemaal geen realtime JTAG-debugger of enig ander type debugger. De CPU had echter wel een interne seriële/UART die je kon gebruiken om eenvoudige karakteruitvoer te schrijven om te bepalen wat de code aan het doen was. Standaard "C"-functieaanroepen naar printf/sprintf werden zelfs niet ondersteund op de CPU omdat het RAM-geheugen te klein was.
Bij de ontwikkeling van de robot werden verschillende circuits gebruikt, zoals FET-drivers voor motorbesturing, om CPU-besturing over een reeks 12VDC-motoren mogelijk te maken, zodat de robot zich in een kamer kon bewegen. Een ruw "Lidar" -systeem werd gebouwd met behulp van een laser-LED, spiegel en detector. Hierdoor kon een eenvoudig "1 bit" beeld van de kamer vóór de robot worden afgebeeld. Ik gebruik de term 'in beeld' ook heel losjes. Een eenvoudige kaart van "aan/uit" voor obstakels werd gemaakt in ongeveer 32 bytes geheugen. De CPU-code zou dan proberen te bepalen of de robot naar een opening of muur in het doolhof bewoog waar hij doorheen probeerde te navigeren. Tijdens de wedstrijd kon de robot met succes door het doolhof navigeren. Ik schreef zelfs een paper over het ontwerp van de robot en het won de 2e plaats in de IEEE Student Paper Competition in 1997 aan de George Washington University. De robot werkte en ze lieten me afstuderen met een graad in elektrotechniek.
Senior Jaar Projecten 2018
Ik was onlangs aan de Universiteit van Scranton als brancheadviseur om te helpen met het geven van ideeën voor de cursussen op basis van wat de industrie nodig heeft en welke vaardigheden/technologie relevant zijn voor de technische uitdagingen van vandaag. Ik vroeg een van mijn professoren naar de robotprojecten en wat studenten nu doen.
De University of Scranton organiseert nog steeds elk jaar een robotwedstrijd voor hun ingenieursstudenten, maar het is nu een regionale en nationale competitie. De robots die de studenten ontwerpen zijn honderden keren complexer. De huidige robots gebruiken Arm9/Arm11 CPU's zoals de Raspberry PI. De studenten schrijven "C"-code die op Linux draait om rechtstreeks te communiceren met USB-HD-camera's, zodat ze zich werkelijk kunnen inbeelden op de robots. Door Linux, Raspberry PI en de rijkdom aan Open Source-projecten die beschikbaar zijn via GIT en Google te combineren, hebben de studenten toegang tot algoritmen voor beelddetectie en -herkenning. Tijdens de ontwikkeling van de huidige robotprojecten kunnen de studenten open source-algoritmen downloaden, deze debuggen met externe ethernetmonitoren waardoor ze elke variabele kunnen zien en in één stap hun code voor debuggen. Studenten besteden dan meer tijd aan het ontwikkelen van zeer slimme navigatie-algoritmen om te proberen hun robot een betere voorsprong te geven tijdens de wedstrijd.
Toen ik dit hoorde, antwoordde ik meteen "Hoe oneerlijk!". In mijn tijd moesten we een volledige afbeelding opslaan in 32 bytes en een stackmanager coderen om onze code zelfs te laten draaien op de 512 bytes RAM die we kregen. Natuurlijk is de Raspberry PI niet eens de "top" van de technologie van vandaag - maar het is lichtjaren voorbij alles wat beschikbaar was in 1997. Niet alleen is de hardware geavanceerder, maar dankzij de foutopsporings- en ontwikkelomgevingen kunnen de studenten zich concentreren op het ontwerp in plaats van te worstelen met geheugenproblemen. Sommige dingen blijven echter hetzelfde. De robot moet nog bewegen. Hoewel de studenten toegang hebben tot een aantal hogere CPU's, moeten ze nog steeds een 3,3 V-poort op een proces krijgen om een 12VDC-motor aan of uit te zetten. Dit brengt de leerlingen terug naar circuitontwerp voor transistors en FET's, ze leren hoe deze basiscomponenten werken en laten hun robots bewegen.
Ik glimlachte en zei dat de basis nog steeds van toepassing is, en de studenten herkennen dit. Geavanceerde elektronica vertrouwt nog steeds op de fundamentele werking van enkele transistors; misschien een aan de buitenkant van een CPU die een motor aanzet, of 5 biljoen ervan aan de binnenkant van een CPU om een afbeelding en navigatiecode te verwerken.
http://news.scranton.edu/articles/2017/ 03/FIRST-Robot-Comp-2017.shtml
Dus wat nu?
Mijn derde "baan" – die ik nog steeds heb – is het runnen van mijn eigen elektronica- en softwareadviesbedrijf. Ik ben in 2001 een adviesbureau begonnen en het heeft zeker vol werk en onverwachte activiteiten gezeten. Ik heb direct meer dan een dozijn mensen in dienst genomen en we hebben aan hardware- en softwareprojecten gewerkt, variërend van het ontwerpen van stroomvoorzieningen, printerstuurprogramma's, beeldverwerking, netwerkapparatuur, harde schijven en cryptografie. Persoonlijk ben ik van plan me meer te concentreren op mijn favoriete technologie-item - Xilinx FPGA's.
Moderne FPGA-apparaten zoals de Kintex/Atrix-serie brengen de beste onderdelen van hardware- en softwareontwikkeling samen; herconfigureerbare hardware, herconfigureerbare software en gelijktijdige foutopsporing. Een specifiek project waaraan ik heb gewerkt is voor een massaspectrometer. In dit specifieke ontwerp waren er veel beperkingen voor snelheid en gegevensverzameling. Een deel van de oplossing was "voeg gewoon een andere processorkern toe". Bijna als magie, een single-core-apparaat vanwege een dual-core-apparaat waarmee huishoudelijke taken en tijdkritieke functies kunnen worden gepartitioneerd. De mogelijkheid om een fysiek apparaat, zoals een FPGA, opnieuw te configureren met extra processorkernen zou in 1997 moeilijk te bedenken zijn geweest. Met moderne FPGA-apparaten kun je dit nu altijd doen.
Ik ben van plan later dit jaar terug te keren naar de Universiteit van Scranton om met een aantal studenten te praten over lopende FPGA-projecten. Ik zal me meer op hen concentreren op mijn werk; misschien zal ik in de toekomst nieuwe ingenieurs kunnen begeleiden als ze aan de eerste baan van hun nieuwe carrière beginnen. PS Een "score" is 20 jaar. Dat moest ik nog eens opzoeken. Ik ben een ingenieur, geen Engelse majoor.
Bijlage A – Fragmenten uit My Robot Paper of
“Hoe de tijden zijn veranderd”
Dit artikel is geschreven door de heer Spano's, hij maakt deel uit van ons team. Klik hier als u zijn biografie wilt lezen.
Industriële technologie
- Hoe werd vanadium ontdekt?
- Hoe wordt platina gebruikt?
- Hoe cloudtechnologie te beveiligen?
- Hoe maak je een Arduino+Raspberry Pi-robotplatform
- Hoe moderne technologie de methoden voor het snijden van paaseieren heeft veranderd?
- ‘Artistieke’ robot bij NPE
- 9 wetten van technologie die de wereld hebben veranderd
- Hoe CNC-machines de productie hebben veranderd
- Hoe logistieke dienstverleners moeten investeren in technologie
- Hoe een CNC-router ons leven heeft veranderd?
- Michael Loggins