


Een waterpas ontwerpen voor slechtzienden
Dit artikel beschrijft het complete ontwerp van een waterpas voor slechtzienden. Het gebruikt een ADXL312-versnellingsmeter om de zwaartekracht in de horizontale en verticale vlakken te meten en klinkt een zoemer wanneer de versnellingsmeter exact horizontaal of verticaal is.
Het kan ook worden gebruikt als een hellingssensor om bijvoorbeeld aanhangers waterpas te stellen in autotoepassingen waarbij de waterpas zich op een afstand van het neuswiel kan bevinden. Het kan ook worden gebruikt als een subcircuit in stabiliteitssystemen voor auto's of drones.
Inleiding
Amar Latif veroorzaakt opschudding in de Britse culinaire scene na te zijn verschenen op Celebrity MasterChef . Amar is echter niet alleen een goede kok, hij runt ook zijn eigen reisorganisatie, is een motiverende spreker, heeft het grootste deel van Zuid-Amerika doorkruist en is ook een tv-persoonlijkheid. Komt er geen einde aan de superkrachten van deze man?
Helaas, die is er. Amar is voor 95% blind. Naarmate de technologie voortschrijdt en de wereld worstelt om het bij te houden, is de strijd voor slechtzienden nog moeilijker. De meeste technologische ontwikkelingen vereisen dat we meer tijd achter een scherm doorbrengen. Voor slechtzienden blijft overmatige schermtijd een 'al was het maar'.
Als technologie kan worden gebruikt om het leven van mensen met een visuele beperking te verrijken, kan dat alleen maar goed zijn. Met slechts 18% van de geregistreerde blinde populatie die volledig blind is (of "zwartblind"), laat dit de overgrote meerderheid met op zijn minst enig zicht achter, zelfs als ze geen details kunnen onderscheiden. Zo ontstond het idee van een waterpas voor blinden.
Ontwerpoverzicht
Het ontwerp van de kantelsensor was gebaseerd op de ADXL312, een accelerometer met lage stroomsterkte die tot ±1,5 g kan meten. in de x-, y- en z-assen waarbij de gegevens via een SPI-bus worden uitgelezen. Het onderdeel is verkrijgbaar in een 5 mm × 5 mm verpakking en verbruikt 0,1 A in de standby-modus. Het meet tot een resolutie van 10 bits, zodat de ADXL312 veranderingen kan detecteren tot slechts ±2,9 mg in elke as. De ADXL312 slaat de zwaartekrachtgegevens voor elke as op als een twee-complementwaarde tot ± 511, die de microcontroller leest en weergeeft op een enkelregelig LCD-scherm van 16 tekens. Afbeelding 1 toont de detectieassen van de ADXL312.
klik voor afbeelding op volledige grootte
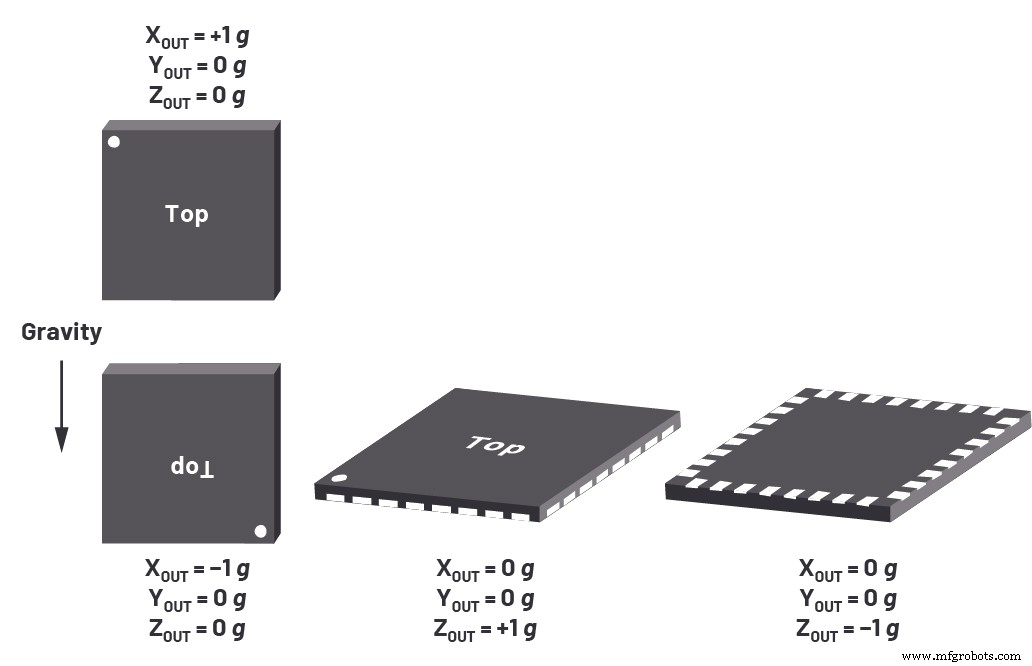
Figuur 1. Aftastassen van de ADXL312. (Bron:Analoge apparaten)
Het deel heeft een volledige schaalwaarde van 1,5 g , dus een zwaartekracht van 1 g geeft een lezing 2 / 3 van dit. Daarom, als de ADXL312 precies waterpas is, zou het z-asregister 2 moeten lezen / 3 volledige schaal, terwijl de x- en y-assen nul moeten zijn. Evenzo, wanneer de ADXL312 perfect verticaal is, moet de x-aswaarde 2 zijn / 3 volledige schaal, terwijl de y- en z-assen nul moeten zijn. Als de ADXL312 begint weg te kantelen van een as, begint de maximale aflezing af te nemen, terwijl de aflezing op de andere assen begint toe te nemen, volgens de sinus van de kantelhoek.
In de ADXL312
De ADXL312 is een micro-elektromechanisch systeem (MEMS) dat bestaat uit een op een oppervlak van polysilicium bewerkte micromachinale structuur die bovenop een siliciumwafel is gebouwd. Polysiliciumveren hangen de structuur over het oppervlak van de wafel en bieden weerstand tegen versnellingskrachten.
Vaste siliciumvingers vermengen zich met vingers op een bewegende proefmassa om differentiële condensatoren te creëren waarvan de kenmerken kunnen worden gemeten. Versnelling buigt de straal af en brengt de differentiële condensatoren uit balans, wat resulteert in een sensoruitgang waarvan de amplitude evenredig is met de versnelling. De structuur wordt getoond in figuur 2.
klik voor afbeelding op volledige grootte
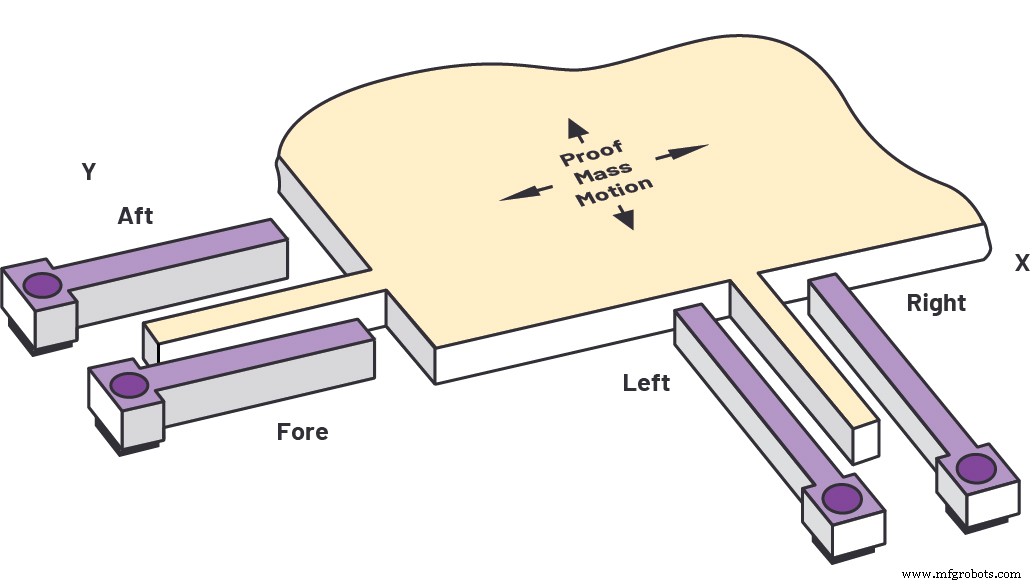
Figuur 2. De interne werking van de ADXL312. (Bron:Analoge apparaten)
De ADXL312 kan worden geadresseerd met I 2 C of SPI, en de x-, y- en z-gegevens worden opgeslagen in zes interne 8-bits registers. Het heeft ook veel andere functies, waaronder een FIFO met 32 niveaus, twee multifunctionele interrupts, offset-registers, een mechanische zelftest en automatische slaapstanden.
Het ontwerp van de waterpas
Het volledige schakelschema van de hellingssensor wordt getoond in figuur 3.
De ADXL312 heeft een maximale voedingsspanning van 3,6 V, terwijl het LCD-scherm en de zoemer 5 V nodig hebben, dus de hoofdingang naar het circuit is 5 V, en dit wordt naar beneden geregeld met een lineaire regelaar van 3,3 V, 150 mA (ADP121) om voed de ADXL312, microcontroller en E2-geheugen.
Poort B, Pin 2 (de CAL-pin) op de microcontroller wordt hoog getrokken door een weerstand van 10 kΩ. Het heeft ook een jumper waardoor het kan worden aangesloten op aarde. Bij het opstarten ondervraagt de microcontroller de status van de CAL-pin, en als deze pin naar beneden wordt getrokken door de jumper, leest hij de x-, y- en z-registers, trekt deze meetwaarden van nul af en laadt het resultaat vervolgens in de offset-registers binnenin de ADXL312 en slaat ze op in het externe E2-geheugen, de 25AA040. De ADXL312 voegt automatisch de meetwaarden van de offsetregisters toe aan toekomstige metingen zonder tussenkomst van de processor, waardoor de gekalibreerde offsets worden verwijderd.
Als de jumper wordt verwijderd, wordt de CAL-pin omhoog getrokken en wordt de kalibratieroutine overgeslagen. De offset-metingen worden rechtstreeks uit het E2-geheugen gelezen en in de offsetregisters van de ADXL312 geladen. Zo kan tijdens de fabricage de waterpas in een kalibratiemal worden gemonteerd met de CAL-pin laag gehouden, het apparaat kan worden gekalibreerd en de offsetwaarden worden opgeslagen in het E2-geheugen. Na kalibratie wordt de jumper verwijderd en bij de volgende keer opstarten wordt het E2-geheugen opgevraagd en worden de gekalibreerde offsetmetingen geladen in de offsetregisters van de ADXL312.
De software voert vervolgens acht metingen uit van elke as, en de resultaten worden gemiddeld en vervolgens weergegeven op het 16-tekens LCD-scherm. De weergave wordt elke 100 ms bijgewerkt.
klik voor afbeelding op volledige grootte
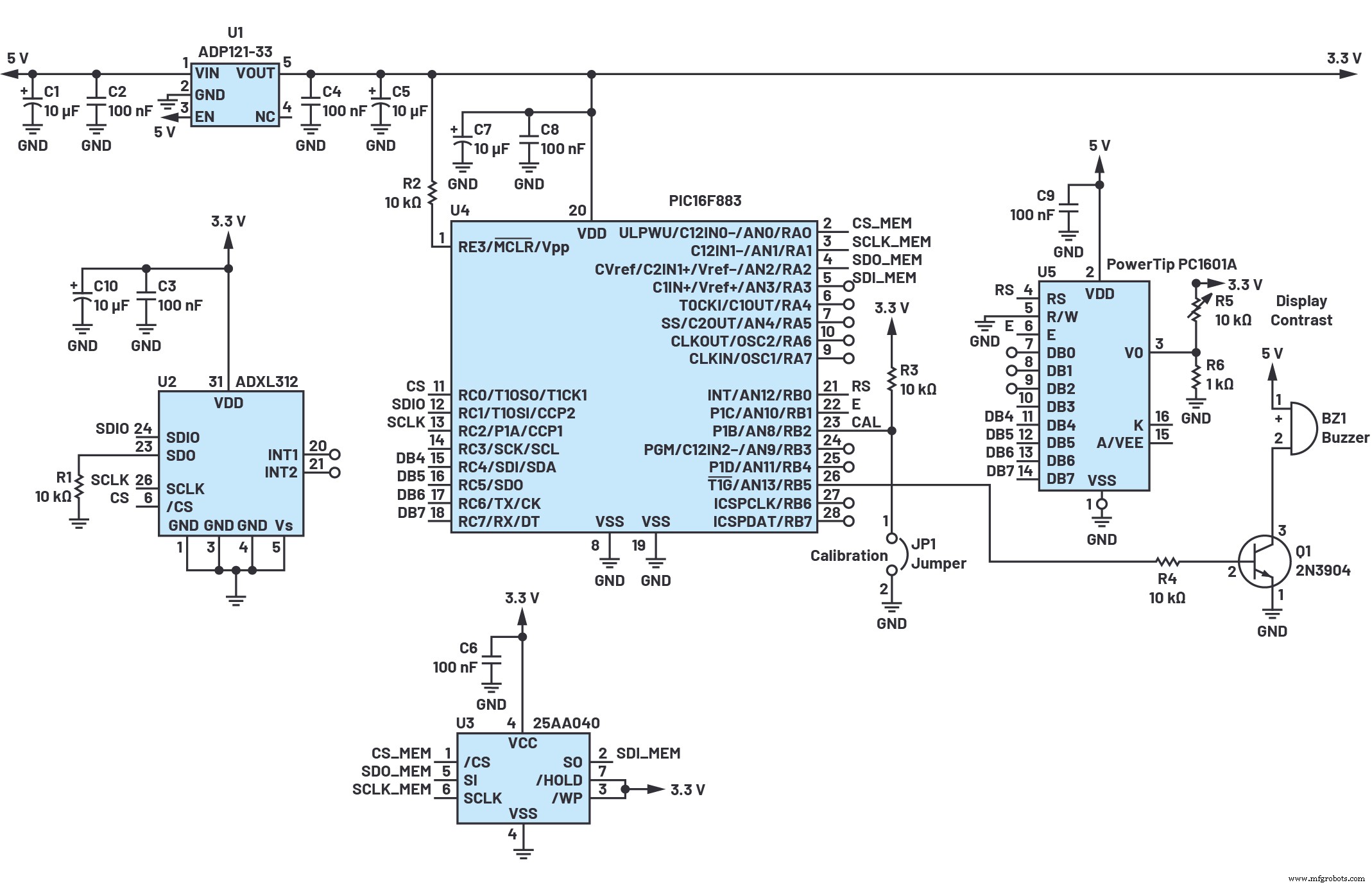
Figuur 3. Het complete schema van de waterpas voor slechtzienden. (Bron:Analoge apparaten)
Afbeelding 4 laat zien dat de maximale gevoeligheid wordt bereikt wanneer elke sensor de nulwaarde nadert. Dit is waar de helling van de sinusgolf het steilst is, waardoor de maximale verandering in zwaartekrachtmeting wordt gegeven voor elke verandering in helling.
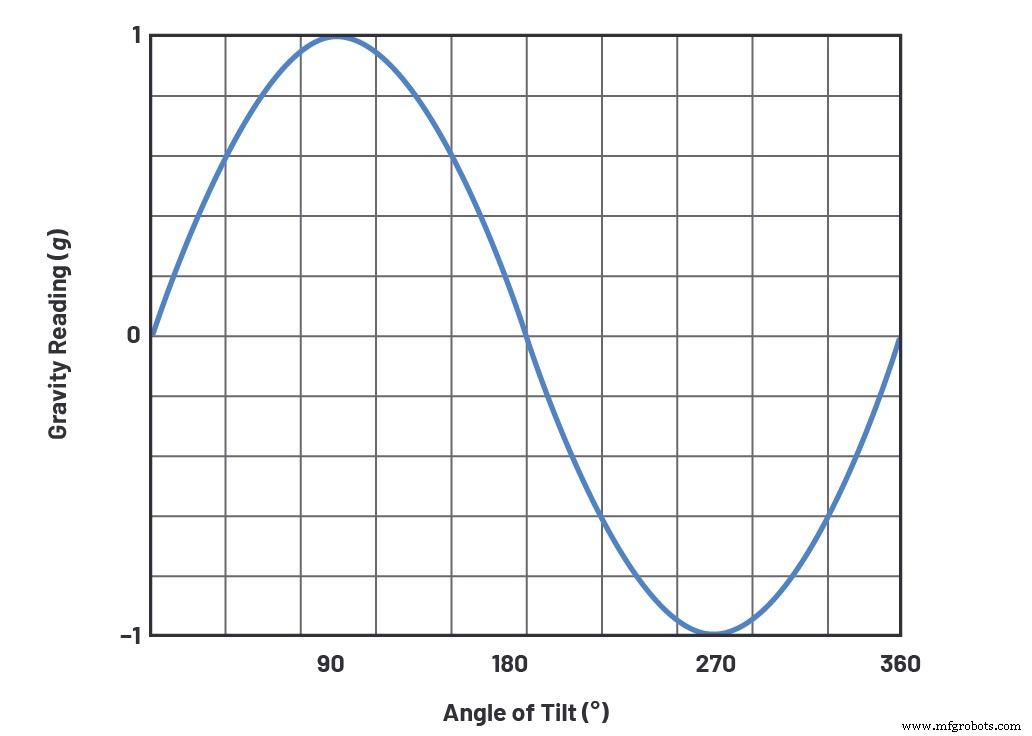
Figuur 4. Toont de sinusoïdale verandering van g-kracht met hoek. (Bron:Analoge apparaten)
Gelukkig hoeft de waterpas de helling alleen te meten wanneer elke sensor perfect horizontaal is en de sensorwaarde bijna nul is.
De software is geschreven om zowel de x- als de z-as tegelijk te kalibreren. Het onderdeel is eenvoudig op een horizontaal platform te plaatsen en de x-as van de kantelsensor te kalibreren. Op dit punt ervaart de z-as echter een kracht van 1 g , dus er moet een z-meting worden gedaan, vergeleken met de volledige telling bij 1 g , en elke fout die in het offsetregister wordt geladen. Een nauwkeurigere kalibratie van elke as van de hellingssensor kan worden bereikt door te kalibreren in zowel het horizontale als het verticale vlak, maar dit vereist een 2-traps kalibratie en een aanpassing van de software.
Tabel 1 toont een voorbeeld van twee-complementgegevens. Positieve getallen volgen de conventionele binaire notatie. Negatieve getallen gebruiken de meest significante bit (MSB) als tekenbit; positieve getallen hebben dus een MSB gelijk aan nul en negatieve getallen hebben een MSB gelijk aan 1.
Tabel 1. Een voorbeeld van twee complementaire gegevens
Decimaal Binair +51101 1111 1111+100 0000 0001000 0000 0000-111 1111 1111-51110 0000 0001Het twee-complement van een positief getal kan worden gevonden door alle bits om te keren en vervolgens 1 op te tellen. De code verandert dus van 00 0000 0000 in 11 1111 1111 bij de overgang van een telling van nul naar een telling van –1.
De software leest de x- en z-registers en, als de waarde van een van beide registers 0 of 1023 is (11 1111 1111), zet het poort B, bit 5 hoog, waardoor transistor Q1 wordt ingeschakeld en de 5 V-zoemer klinkt. Wanneer de hellingssensor perfect horizontaal is, heeft de x-as een waarde van 0 of 1023 en wanneer perfect verticaal, heeft de z-as een waarde van 0 of 1023. Alleen wanneer beide registers niet gelijk zijn aan 0 of 1023 is dat niet het geval. de zoemer stopt met klinken.
Nauwkeurigheid en verdere ontwikkelingen
Rekening houdend met slechts één as, een maximale waarde van 1 g wordt bereikt wanneer de zwaartekracht langs die as inwerkt, en deze waarde wordt teruggebracht tot 0 g omdat het onderdeel 90° is gekanteld, zoals weergegeven in afbeelding 5.
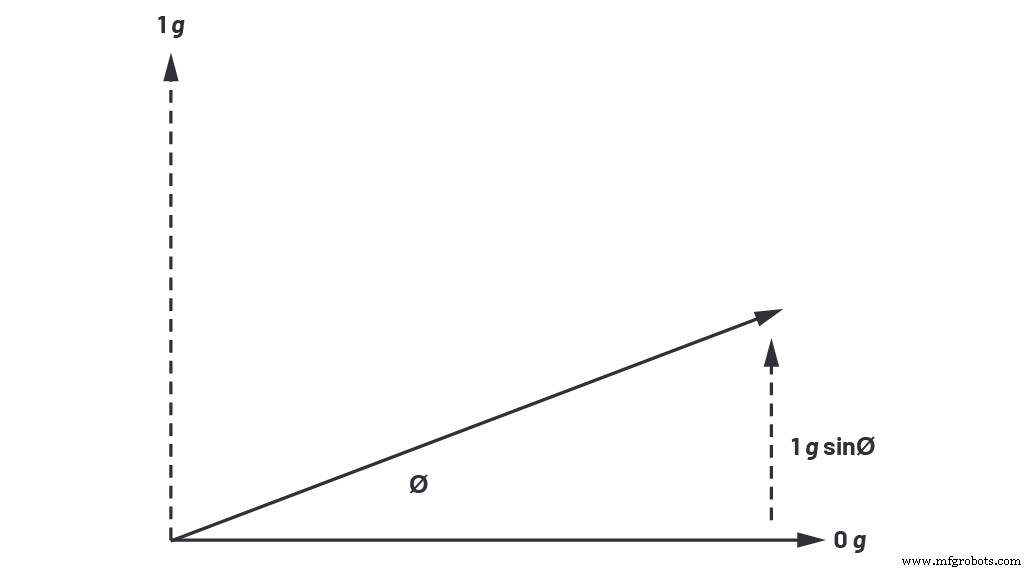
Figuur 5. Berekening van de hellingshoek met behulp van de zwaartekrachtmeting. (Bron:Analoge apparaten)
De uitgeoefende zwaartekracht wordt dus bepaald door de vergelijking

waarbij Ø de hellingshoek is gemeten ten opzichte van de horizontaal. Als het onderdeel kan meten tot een resolutie van 2,9 mg , dan kan het oplossen tot een hoek van 0,17°. Het is moeilijk om een cijfer te bepalen voor de nauwkeurigheid van een standaard waterpas, omdat de exacte positie van de bel moeilijk vast te stellen is. Uit experimenten blijkt echter dat het uiteinde van een waterpas van 1,2 m ongeveer 3,2 mm kan bewegen (de breedte van twee onbevolkte PCB's!) voordat de luchtbel uit het midden lijkt. Dit komt overeen met een hoek van ongeveer 0,15°, wat aangeeft dat we een waterpas met waterpas kunnen vervangen door een elektronische kantelsensor met weinig verlies aan resolutie.
Als meer nauwkeurigheid vereist is, biedt de ADXL313 een resolutie van 11 bits op een schaal van 1 g. De interface en registersets lijken erg op die van de ADXL312, dus de software vereist niet veel aanpassingen. De ADXL355 biedt aanzienlijk minder ruis en een hogere resolutie.
De ADXL312 heeft een ruisdichtheid van 340 μg /√Hz, en hoe lager de bandbreedte, hoe beter de ruis. De bandbreedte van het onderdeel is programmeerbaar (van 3.125 Hz tot 1600 Hz met een standaardinstelling van 50 Hz). Hoewel het verminderen van de bandbreedte de ruis verbetert, zal dit ook de updatesnelheid van het scherm verminderen. Voor dit ontwerp was de bandbreedte ingesteld op 6,25 Hz, wat een rms-ruis van 850 μg inhoudt . De ruis kan ook worden verminderd door veel meer metingen te doen en het gemiddelde te nemen.
Een verdere verbetering zou zijn om een LCD-uitlezing met graden te hebben. Dit vereist echter het gebruik van wiskundige functies in de C-bibliotheek als sinussen en cosinuslijnen in de software moeten worden opgenomen. Deze functies nemen te veel coderuimte in beslag voor een low-end microcontroller. Een nauwkeurige benadering van een sinusfunctie kan worden bereikt met behulp van de Taylor-reeksuitbreiding, en dit zou aanzienlijk minder coderuimte in beslag moeten nemen.
Conclusie
De ADXL312 biedt een goedkoop elektronisch kantelmeetsysteem dat eenvoudig kan worden gekoppeld aan een low-end microcontroller. Het eerder beschreven ontwerp heeft bewezen dat het de nauwkeurigheid van conventionele waterpassen kan evenaren, maar dan met een elektronische interface. Hierdoor kan het worden gebruikt als een subsysteem in grotere ontwerpen die hellingshoeken moeten meten, zoals trailernivelleringssystemen, stabiliteitscontrolesystemen en drones.
Wat nog belangrijker is, het kan worden gebruikt om de onafhankelijkheid van slechtzienden te vergroten, en deze tekst toont een compleet ontwerp op systeemniveau, inclusief hardware, software en niet-vluchtig geheugen, evenals een audio- en visuele uitvoer.
 Simon Bramble studeerde in 1991 af aan de Brunel University in Londen met een graad in elektrotechniek en elektronica, met als specialisatie analoge elektronica en stroom. Hij heeft zijn carrière doorgebracht in analoge elektronica en werkte bij Linear Technology (nu onderdeel van Analog Devices). Hij is te bereiken via [email protected] .
Simon Bramble studeerde in 1991 af aan de Brunel University in Londen met een graad in elektrotechniek en elektronica, met als specialisatie analoge elektronica en stroom. Hij heeft zijn carrière doorgebracht in analoge elektronica en werkte bij Linear Technology (nu onderdeel van Analog Devices). Hij is te bereiken via [email protected] . Verwante inhoud:
- Het optimaliseren van kantel-/hoekdetectie met hoge precisie:basisprincipes van de versnellingsmeter
- Het optimaliseren van kantel-/hoekdetectie met hoge precisie:basisprestaties bepalen
- Optimaliseren van uiterst nauwkeurige kantel-/hoekdetectie:betere prestaties
- Precisiemetingen uitvoeren met siliconen temperatuursensoren
- Nauwkeurige bewegingsregistratie bereiken in draagbare consumentenapparaten
Abonneer u voor meer Embedded op de wekelijkse e-mailnieuwsbrief van Embedded.
Ingebed
- Een flexibelere kern ontwerpen voor het multi-gigabit campusnetwerk
- Innodisk:AIoT-oplossingen voor de medische sector
- Pleidooi voor neuromorfe chips voor AI-computing
- Motorbesturingen ontwerpen voor robotsystemen
- SIGHT:For the Blind
- Wat zijn de meest voorkomende fouten die u moet vermijden bij het ontwerpen voor productie?
- Het beste niveau voor optimalisatie en organisatie in de Smart Factory
- De uitdaging van de 5S-methode voor de industrie 4.0
- Bedankt voor de herinneringen!
- Wat zijn de belangrijke richtlijnen voor het ontwerpen van PCB's voor de luchtvaart en de ruimtevaart? - II
- Wat zijn de belangrijke richtlijnen voor het ontwerpen van PCB's voor de luchtvaart en de ruimtevaart?