


Hoeveel assen heeft uw robotversteller nodig?
Je hebt besloten dat je een robotpositioner nodig hebt... maar hoeveel assen heb je nodig?
Er zijn zoveel modellen klepstandstellers met zoveel verschillende stijlen. Sommige hebben 1 eenvoudige as, maar andere hebben er veel!
Wat nog verwarrender is, is de reeks configuraties die klepstandstellers kunnen hebben. Assen kunnen verticaal, horizontaal en in elke tussenliggende hoek worden gemonteerd.
Het kiezen van een klepstandsteller met te veel of te weinig assen kan een verspild budget betekenen; Maar hoeveel is te veel!?
Als u een robotpositioner overweegt, heeft u waarschijnlijk al naar verschillende modellen gekeken. U hebt waarschijnlijk draaitafels met één as, positioneerders met twee assen en reuzenraderen met meerdere assen gezien. Je hebt waarschijnlijk verschillende merken, stijlen en prijsklassen verkend.
Als je eerlijk bent, begin je nu waarschijnlijk een beetje ziek te worden van positioners.
Het probleem met klepstandstellers is dat het niet zomaar een kwestie is van zeggen:"Ik koop deze" en het daarbij laten. De positioner die u kiest, is van invloed op hoe gemakkelijk het is om uw robotcel te integreren en te programmeren. Je wilt niet de verkeerde kiezen en het jezelf moeilijker maken dan nodig is om de robot in te zetten en te programmeren.
Als u bijvoorbeeld een 5-assige positioner met een 6-assige robot zou krijgen, zijn dat 11 assen die u moet besturen! Als het nodig is om zoveel assen te hebben, prima. Maar als het niet nodig is, kunt u spijt krijgen van uw aankoop.
Waarom "Hoeveel assen?" Is een verwarrende vraag
Vragen hoeveel assen uw mechanisme nodig heeft, is een heel natuurlijke vraag. Het is echter een lastige vraag om bevredigend te beantwoorden.
Als we het alleen over industriële robots hebben, is een veelvoorkomend antwoord dat er 6-assige robots nodig zijn. Dit is niet altijd waar, maar meestal wel. De reden hiervoor is dat er 6 assen nodig zijn om vanuit elke positie en oriëntatie punten in de werkruimte van de robot te bereiken.
Zoals we hebben uitgelegd in onze Euler Angle Primer, wordt de positie van de eindeffector van een robot geregeld met 6 parameters:3 translatieparameters (X, Y en Z) en 3 rotatieparameters (Rot[X], Rot[Y] en Rot [Z]).
Als uw robot minder dan 6 assen heeft, beperkt u de flexibiliteit van de robot. Dit is logisch voor sommige robots - b.v. palletiseerrobots die objecten alleen van bovenaf hoeven te benaderen. Over het algemeen zijn industriële robots met 6 assen echter het nuttigst voor een breed scala aan taken.
Voorbij de 6-assen wordt uw mechanisme echter "redundant".
7-assige robots kunnen bijvoorbeeld dezelfde punten in hun werkruimte bereiken als een 6-DoF-robot. De besturing van een redundant mechanisme wordt echter ingewikkelder. Als gevolg hiervan wil je geen extra DoF toevoegen als ze niet nodig zijn.
Het toevoegen van een positioner betekent meer DoF aan de robot toevoegen. Dit kan al dan niet leiden tot een redundant systeem.
Of je extra DoF nodig hebt, hangt af van de specifieke behoeften van je taak.
7 stappen om het aantal benodigde assen voor uw toepassing te bepalen
De manier om te bepalen hoeveel assen u nodig heeft, is door nauwkeuriger te kijken naar de vereisten van uw toepassing.
Hier is een proces dat u kunt gebruiken om enkele potentiële positioneerders te identificeren die voor u kunnen werken. Hiermee kunt u inzoomen op enkele potentiële modellen en deze goed beoordelen. Als geen van deze opties geschikt is, kun je weer uitzoomen en de informatie die je hebt geleerd gebruiken om een betere positioner te kiezen.
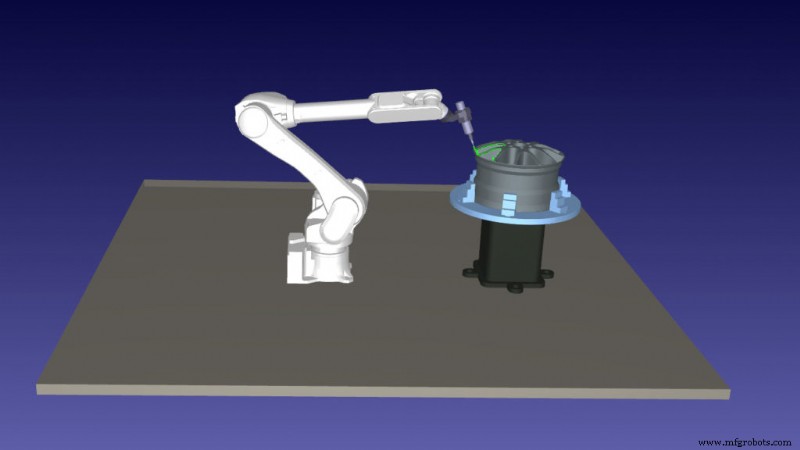
- Kijk naar de vereisten van je taak, en richt je vooral op de werkruimte die nodig is. Een goede manier om dit te doen, is door uw applicatie in een robotsimulator te bouwen.
- Merk op welke aspecten van de taak niet mogelijk zijn als je de robot alleen gebruikt. Welke delen van de werkruimte zijn onbereikbaar? Welke bewegingen zijn onmogelijk?
- Maak op basis van deze informatie een gefundeerde schatting van een of twee typen klepstandstellers die aan uw behoeften kunnen voldoen. Denk eraan om rekening te houden met het laadvermogen dat nodig is om uw werkstukken vast te houden.
- Zoek enkele positioneerders op de markt die aan uw criteria zouden kunnen voldoen en test ze in uw simulatie. Zorg ervoor dat u voor elke klepstandsteller die u probeert uw installatie opslaat als een nieuw project, want u komt later terug op een van de projecten.
- Als een van de modellen perfect werkt, geweldig! Test toch een paar opties om te zien welke eigenschappen echt nodig zijn. Onthoud dat je niet wilt eindigen met meer DoF dan je nodig hebt.
- Als geen van de modellen voor uw toepassing werkt, gebruik dan de informatie die u heeft verzameld om uw vereisten te verfijnen.
- Ga terug naar de markt en zoek naar een of twee modellen die aan deze nieuwe eisen voldoen. Test opnieuw in uw simulatie voordat u uw keuze maakt.
Door een proces als dit te gebruiken, wordt een deel van het giswerk weggenomen bij het identificeren van het juiste aantal assen. Met elke test in uw simulatie leert u een beetje meer over wat u echt nodig heeft van een positioner om uw taak te voltooien.
Maak een keuze en werk ermee
Als u eenmaal een model heeft gevonden dat geschikt is voor uw taak, kunt u verder gaan en de toepassing grondiger ontwikkelen in de simulator.

Open uw opgeslagen project met de door u gekozen positioner en verfijn het tot de volledige applicatie. Hierdoor kunt u alle aspecten van de taak testen en de toepassing voorbereiden voor eenvoudige integratie.
Nadat u uw klepstandsteller hebt gekocht, hoeft u zich geen zorgen meer te maken of meer assen van nut hadden kunnen zijn voor de taak. Robots zijn erg flexibel en er zijn meestal meerdere manieren om dezelfde acties uit te voeren met een enkele robot.
Als je problemen ondervindt bij het inzetten van de robot, zul je vrijwel zeker een oplossing kunnen vinden met de apparatuur die je hebt. Dit is de waarde van het maken van aankoopkeuzes met een simulator als testbank.
Welk type positioneerders hebt u overwogen? Vertel het ons in de reacties hieronder of neem deel aan de discussie op LinkedIn, Twitter, Facebook, Instagram of in het RoboDK-forum.
Industriële robot
- Hoe bereikt een robot volledige autonomie?
- Hoe nauwkeurig moet uw activavolgsysteem zijn?
- Hoeveel verborgen lagen en verborgen knooppunten heeft een neuraal netwerk nodig?
- Whitepaper:Hoe u uw robotpotentieel kunt vinden
- Hoe u robotica succesvol kunt integreren in uw faciliteit
- Hoeveel kost robotautomatisering?
- Virtual Solutions Center:hoe helpt robotsimulatie bij robotintegratie?
- Hoe levert Robotic Machine Tending in de loop van de tijd ROI op?
- Hoe u de veiligheid van robotlassen in uw werkzaamheden kunt bevorderen
- Hoe weet ik dat het tijd is om een robot te kopen?
- Hoeveel pk heeft een hydraulische pomp nodig?