


Menselijke volgbot
Componenten en benodigdheden
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Apps en online services
 |
|
Over dit project
Hey Guyzz...
In deze pandemie vertrouw ik erop dat iedereen veilig thuis is.
Ik heb een nieuw project gemaakt met de naam Human Following Bot.
bekijk de hele video om dit project thuis te maken.
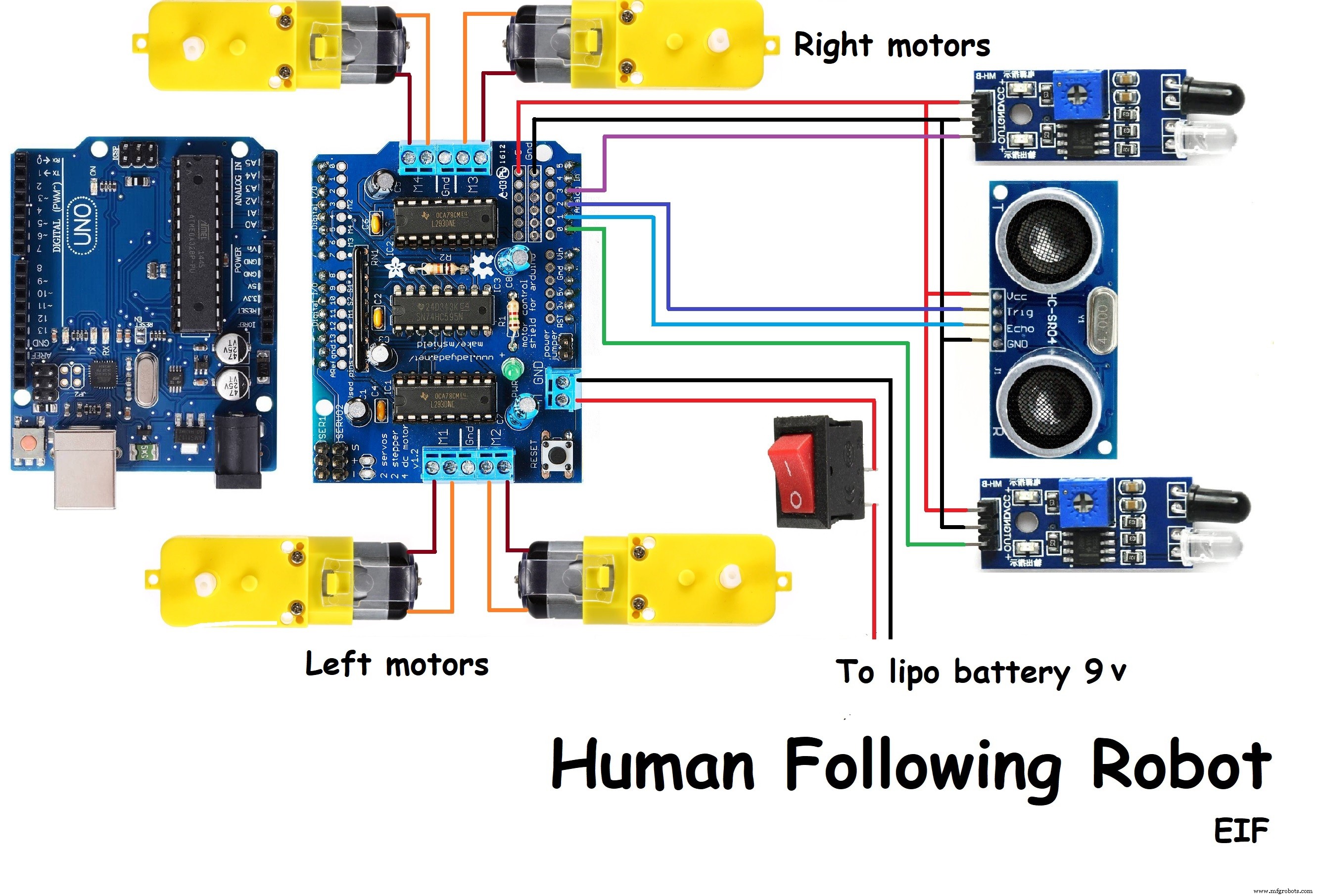
Het gebruikte 2 IR-sensoren en een ultrasone sensor. IR-sensoren worden gebruikt om de mens of het object te volgen en een ultrasone sensor wordt gebruikt om de robot terug te bewegen.
Als je dit project leuk vindt, respecteer het dan.
Geef me suggesties zodat ik het kan verbeteren of eventuele feedback die je op mijn YouTube-kanaal wilt geven.
link is:https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
Je kunt me ook suggesties geven over 'Wat heb ik voor het volgende project gemaakt?'
Stappen om dit project te maken:
1. Verzamel componenten zoals Arduino, DC-motorreductoren met wielen, 2 IR-sensoren, ultrasone sensor, servomotor, karton, l293d motordriverschild, batterij 9 v, schakelaar, jumperdraden enz.
2. Pak karton en plaats alle 4 motoren met wielen erop om een auto te maken.
3. Plaats IR-sensoren op de auto.
4. Plak de servomotor op de auto.
5. Plaats de ultrasone sensor in de doos en voeg er een handvat aan toe, sluit hem daarna aan op de servomotor.
6. Sluit arduino en l293d motorschild aan op de auto.
7. Sluit aan zoals aangegeven in het schakelschema.
8. Upload de code en sluit de schakelaar met de batterij aan op het l293d-motorstuurscherm.
Pas de gevoeligheid van IR-sensoren aan.
Uw project is klaar...!!!
Bezoek mijn YouTube-kanaal een keer en bekijk meer interessante projecten.
"Elektronica is leuk"
Als je mijn kanaal leuk vindt, abonneer je dan alsjeblieft.
link:https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
Code
- Code
CodeArduino
// www.YouTube.com/Electronics is Fun //#include#include #define LEFT A0#define echopin A1 // echo pin#define trigpin A2 // Triggerpin #define RECHTS A3AF_DCMotor Motor1(1,MOTOR12_1KHZ);AF_DCMotor Motor2(2,MOTOR12_1KHZ);AF_DCMotor Motor3(3,MOTOR34_1KHZ);AF_DCMotor Motor4(4,MOTOR34_1KHZ);Servo myservo; int pos =0;lange tijd; ongeldige setup(){Serial.begin(9600);myservo.attach(10);for(pos =90; pos <=180; pos +=1){myservo.write(pos);delay(15);} for(pos =180; pos>=0; pos-=1) {myservo.write(pos);delay(15);}for(pos =0; pos<=90; pos + =1) {myservo.write(pos);delay(15);}pinMode(RIGHT, INPUT);pinMode(LEFT, INPUT);pinMode(trigpin, OUTPUT);pinMode(echopin, INPUT);}void loop() {unsigned int distance =read_cm();int Right_Value =digitalRead(RIGHT);int Left_Value =digitalRead(LEFT);Serial.print("R=");Serial.print(Right_Value);Serial.print(" L=" );Serial.print(Left_Value);Serial.print(" D=");Serial.println(afstand); if((Right_Value==1) &&(distance>=10 &&distance<=30)&&(Left_Value==1)){forword();}else if((Right_Value==0) &&(Left_Value==1) ){turnRight();}else if((Right_Value==1) &&(Left_Value==0)){turnLeft();}else if((Right_Value==1) &&(Left_Value==1)){stop( );}else if(distance> 5 &&distance <10){stop();}else if(distance <5){backword();}delay(50);}long read_cm(){ digitalWrite(trigpin, LOW); vertragingMicroseconden(2); digitalWrite(trigpin, HIGH); vertraging Microseconden (10); tijd =pulseIn (echopin, HOOG); retourtijd / 29 / 2;}void forword(){// zet het aan vooruit Motor1.setSpeed(120);Motor1.run(FORWARD);Motor2.setSpeed(120);Motor2.run(FORWARD);Motor3.setSpeed (120);Motor3.run(FORWARD);Motor4.setSpeed(120);Motor4.run(FORWARD);}void backword(){ // andersomMotor1.setSpeed(120);Motor1.run(BACKWARD); Motor2.setSpeed (120); Motor2.run (ACHTERUIT); Motor3.setSpeed (120); Motor3.run (ACHTERWAARTS); Motor4.setSpeed (120); Motor4.run (ACHTERUIT); }void turnRight(){ // the other rightMotor1.setSpeed(200);Motor1.run(FORWARD);Motor2.setSpeed(200);Motor2.run(FORWARD);Motor3.setSpeed(100);Motor3.run(ACHTERUIT );Motor4.setSpeed(100);Motor4.run(BACKWARD);}void turnLeft(){ // zet hem aan naar linksMotor1.setSpeed(100);Motor1.run(BACKWARD);Motor2.setSpeed(100);Motor2 .run(ACHTERUIT);Motor3.setSpeed(200);Motor3.run(VOORUIT);Motor4.setSpeed(200);Motor4.run(VOORUIT);}void stop(){ // gestoptMotor1.setSpeed(0); Motor1.run(RELEASE);Motor2.setSpeed(0);Motor2.run(RELEASE);Motor3.setSpeed(0);Motor3.run(RELEASE);Motor4.setSpeed(0);Motor4.run(RELEASE); }
Schema's
Productieproces