


Arduino-barometer
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 1 |
Over dit project
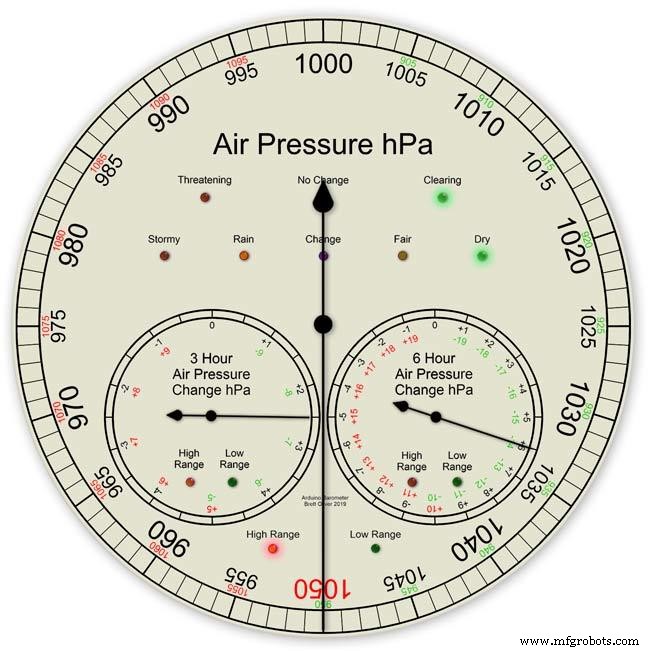
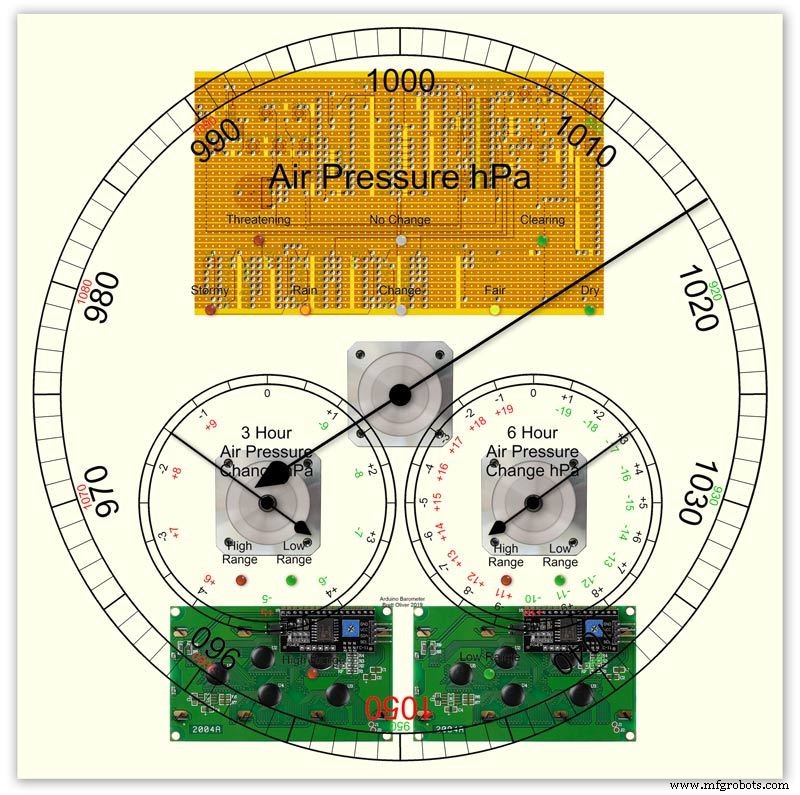
Een Arduino UNO en Nano gebruiken om de luchtdruk weer te geven op een 12" (300 m) analoog display met behulp van 3 stappenmotoren.
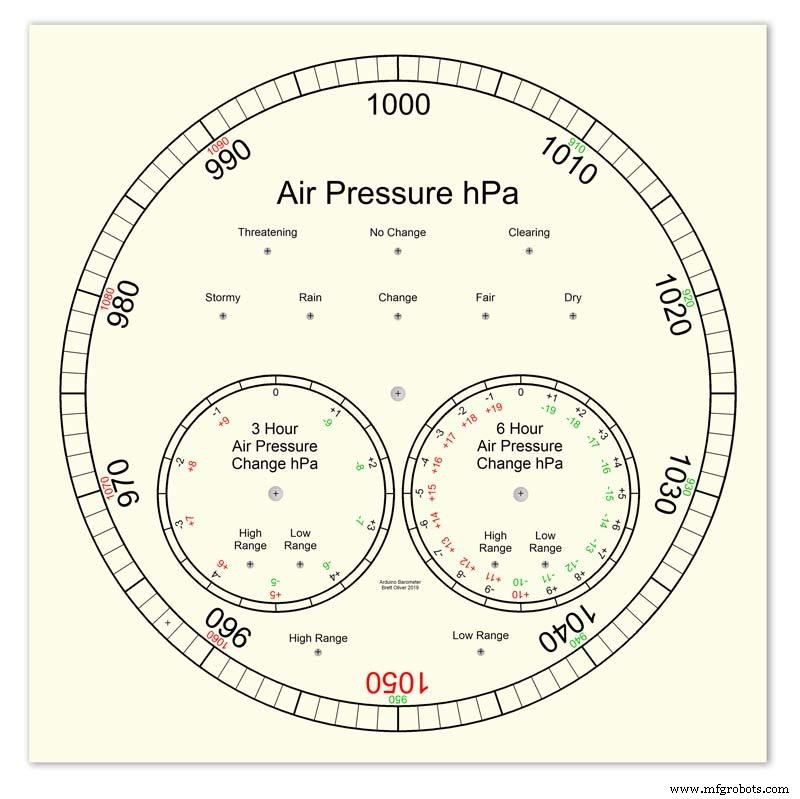
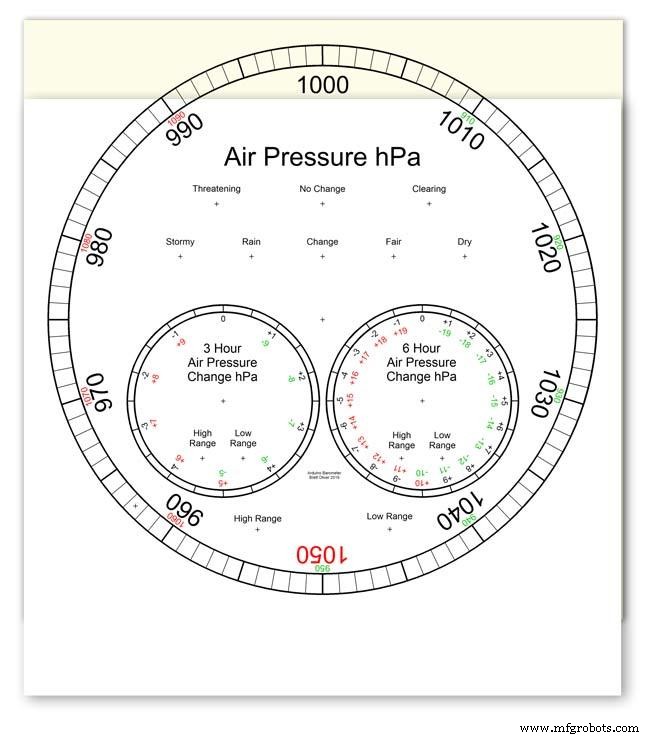
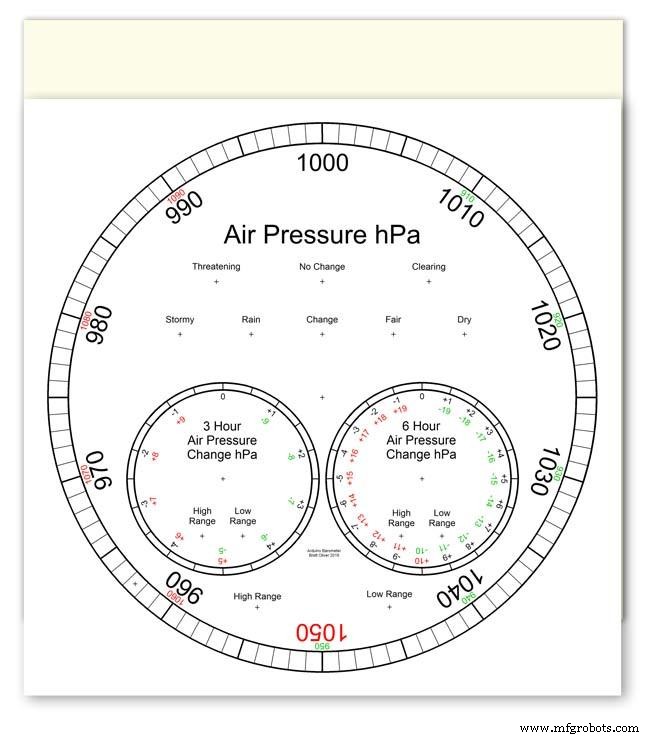
Er is keuze uit 2 wijzerplaatdesigns modern en klassiek.
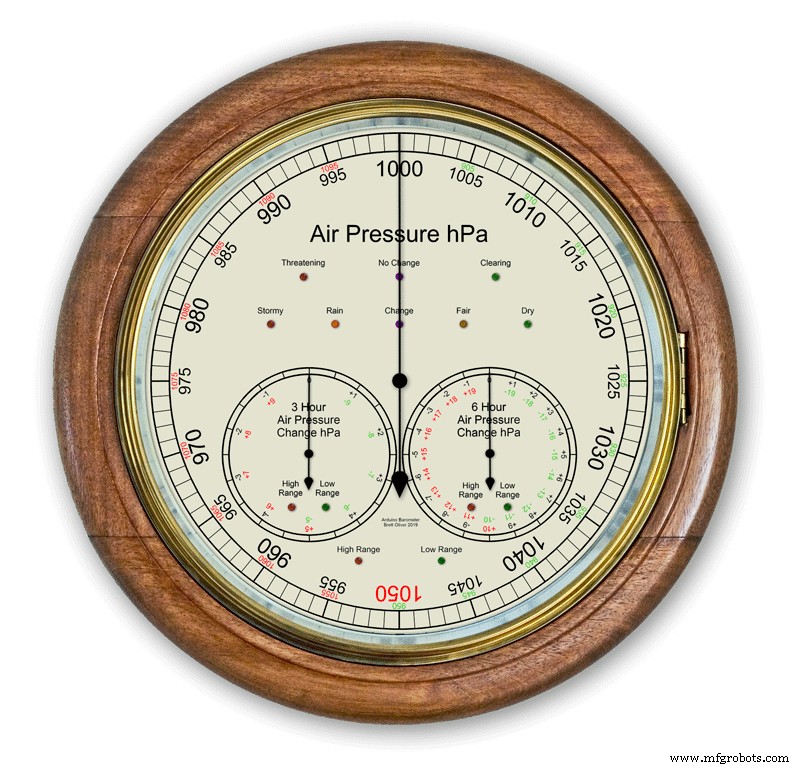
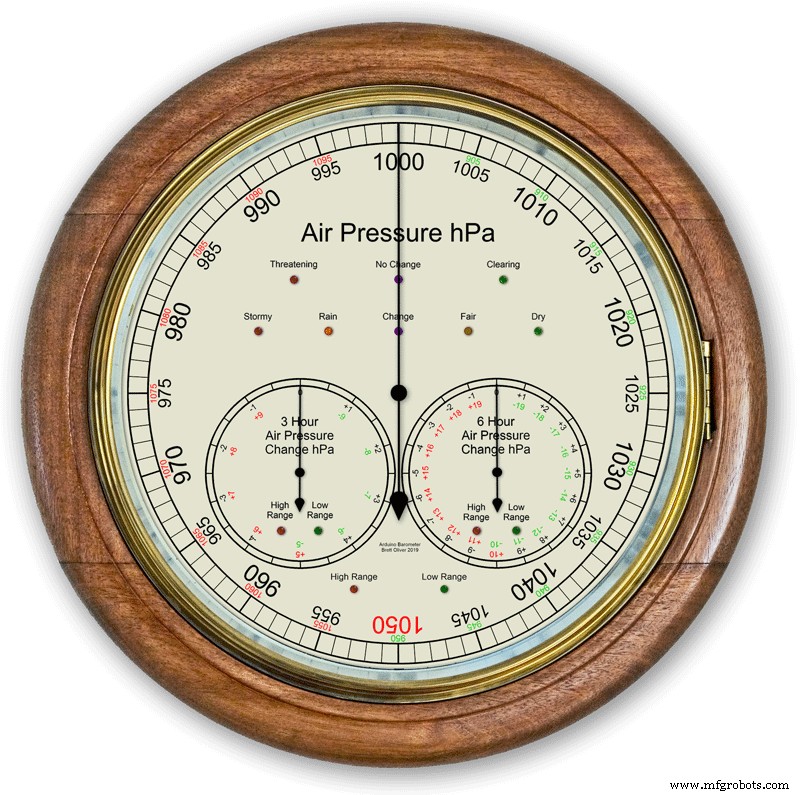
Luchtdruk in hPa (Hectopascal) wordt weergegeven op de grote hoofdknop en wordt elke 10 minuten bijgewerkt.
Er zijn 2 secundaire wijzerplaten, één toont de laatste 6 uur drukverandering en de andere toont de laatste 3 uur drukverandering.
De 3-uurs wijzerplaat heeft een verhoogde resolutie van 0,5 hPa omdat deze wordt gebruikt voor weersvoorspellingen. Er zijn LED's om aan te geven wanneer het uitgebreide bereik in gebruik is op alle drie de schermen en ook LED's om de weersvoorspelling aan te geven buiten de 3-uursweergave.
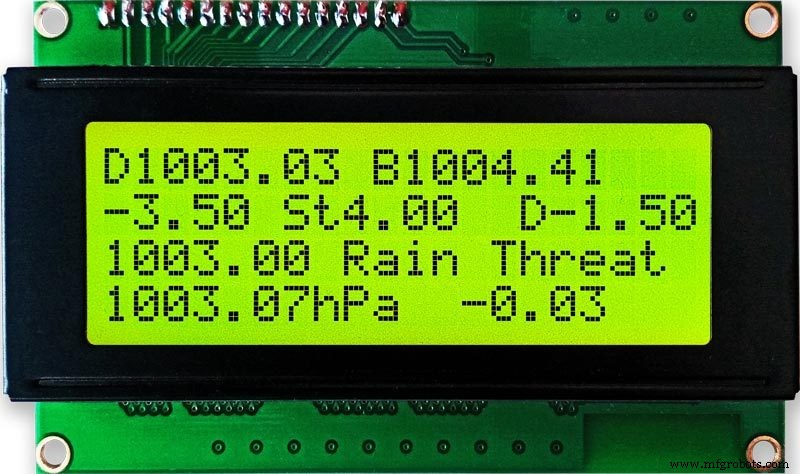
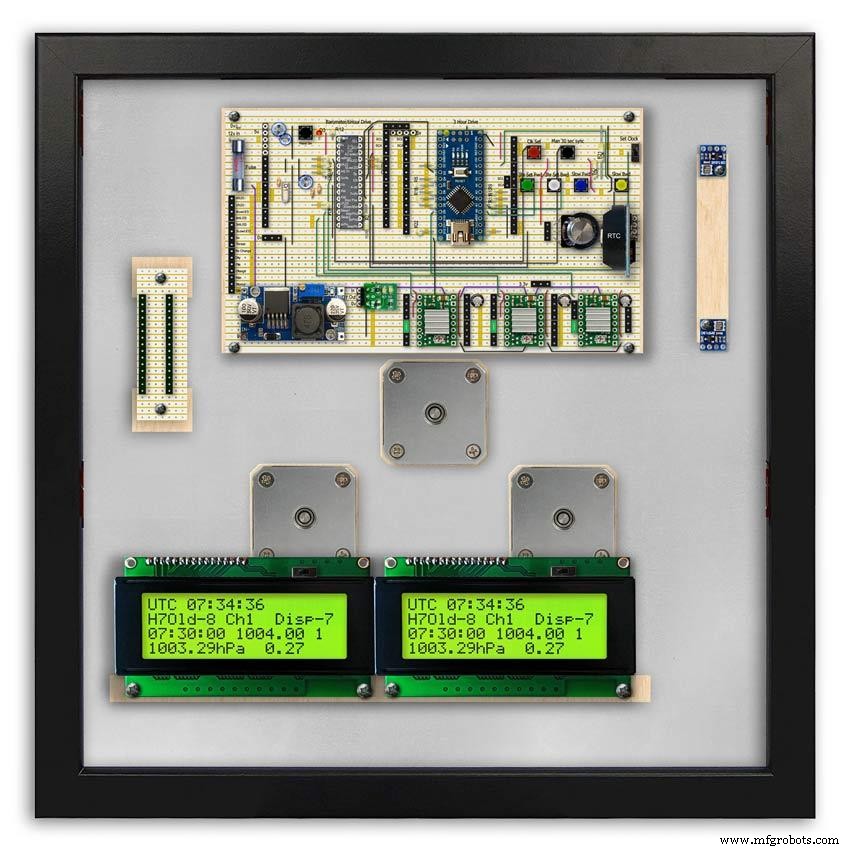
In de behuizing tonen twee 20x4 LCD-schermen informatie van elk van de microprocessors.
De hoofdluchtdrukweergave en de 6-uursweergave worden geregeld door een RTC. Deze klok geeft ook een puls van 1 uur voor de weergave van 3 uur.
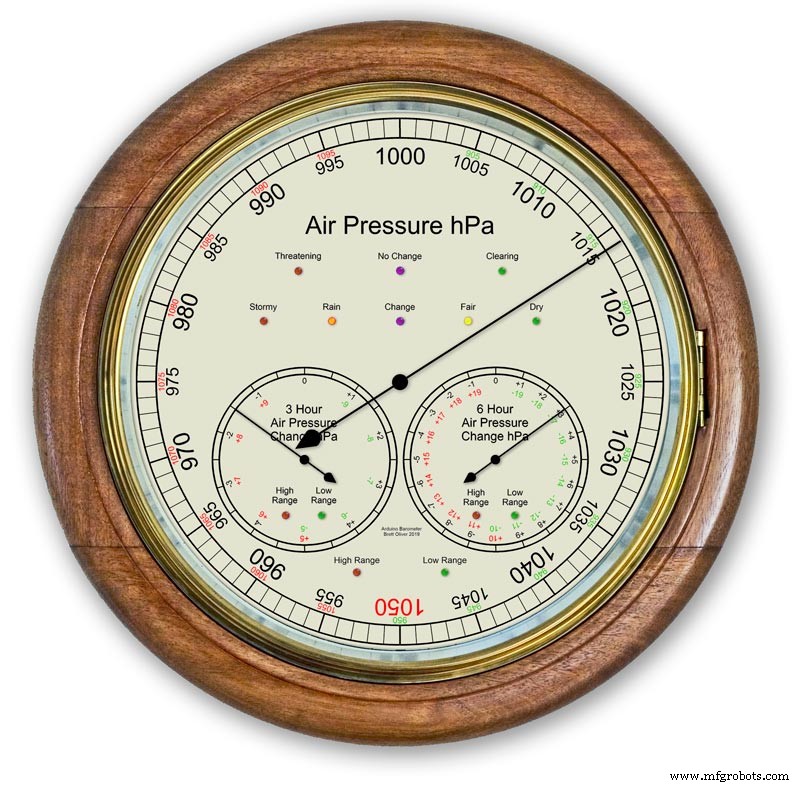
Stap 1:Vergelijking met een conventionele analoge barometer
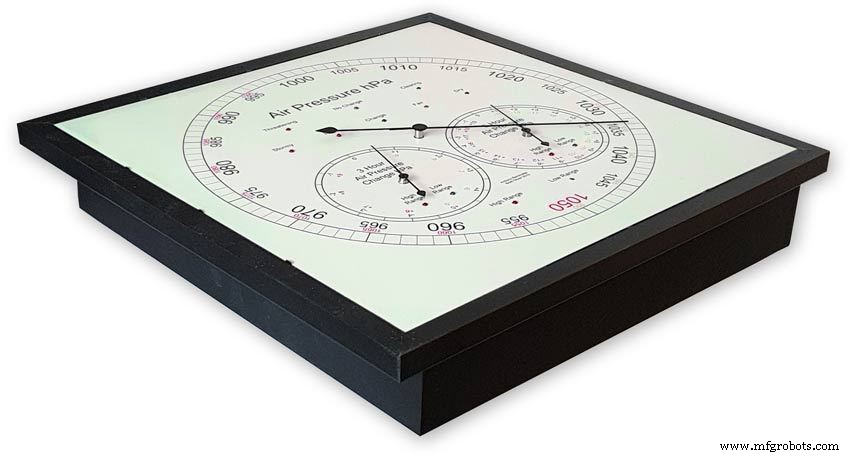
De meeste analoge barometers pic. 2 gebruik gewoon de luchtdruk als indicatie om het weer te voorspellen en je moet niet vergeten om de beweegbare aanwijzer in te stellen en de tijd te noteren waarop deze was ingesteld om de verandering van de luchtdruk te zien.
Het weer wordt eenvoudigweg rond de wijzerplaat geschreven en van de wijzer afgelezen. Prognoses zijn iets ingewikkelder dan dat je de 2e aanwijzer moet gebruiken en elke verandering over een periode van 3 uur moet noteren. U zult de combinaties van huidige druk en stijgende/dalende druk moeten onthouden om uw voorspelling te krijgen.
Mijn Barometer bewaakt continu de drukverandering over een periode van 3 uur en 6 uur en geeft deze metingen weer op 2 aparte wijzerplaten.
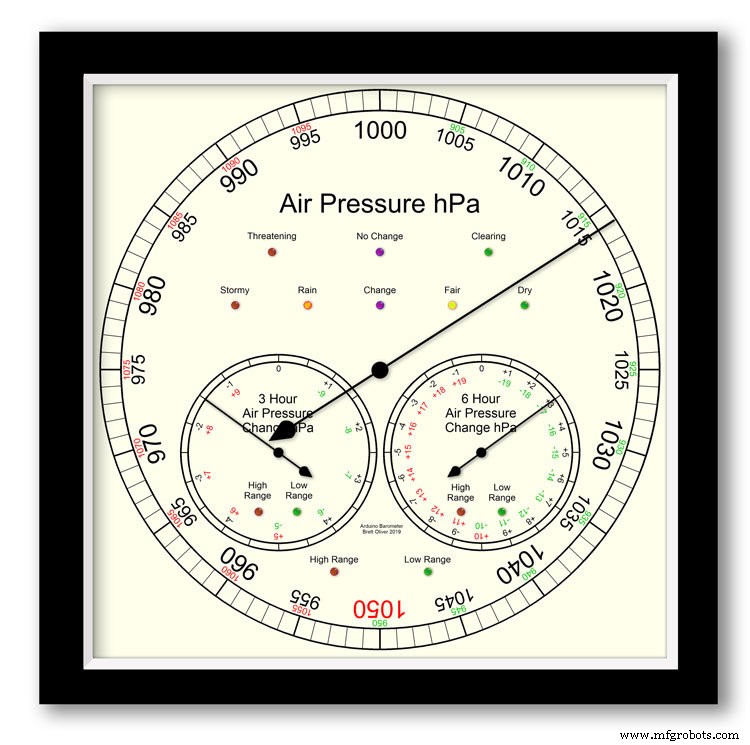
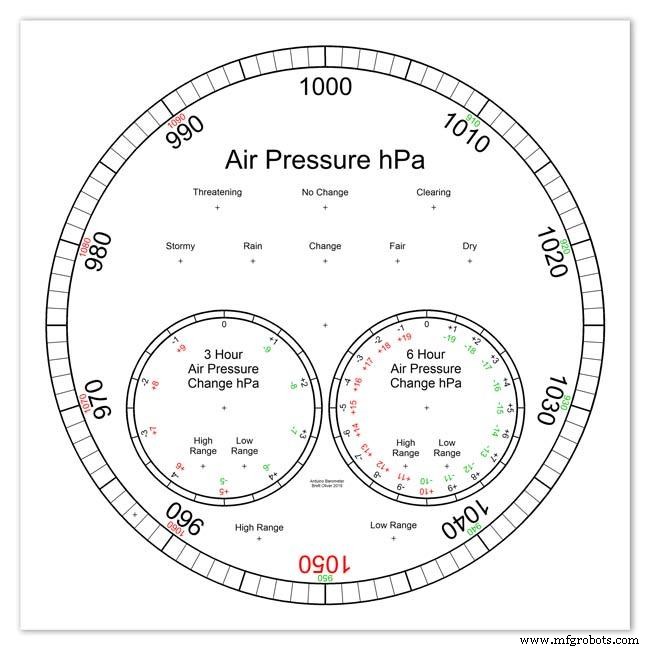
pic.1 toont het bereik van weersvoorspellingen van mijn barometer.
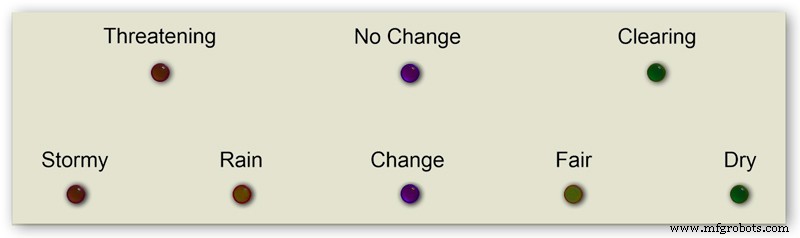
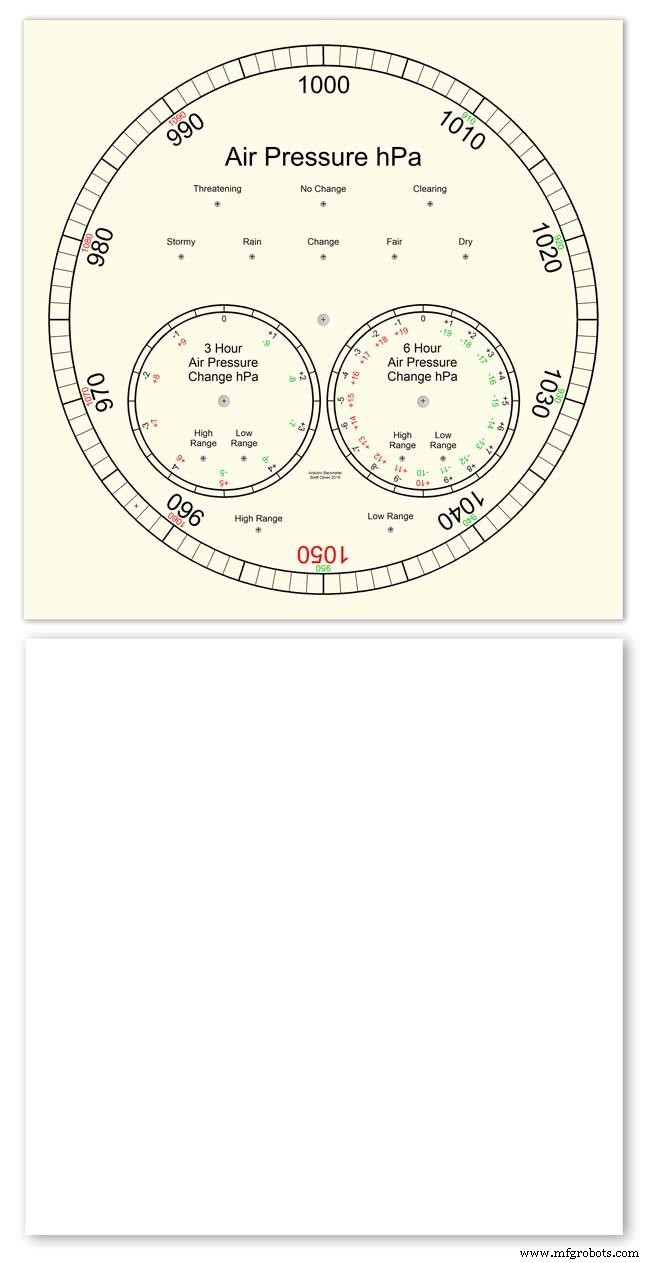
pic.3 toont een close-up van de weersvoorspellings-LED's. De weersvoorspelling is gebaseerd op de laatste 3 uur luchtdrukverandering.
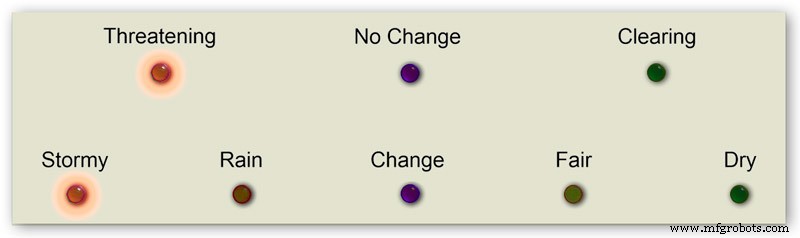
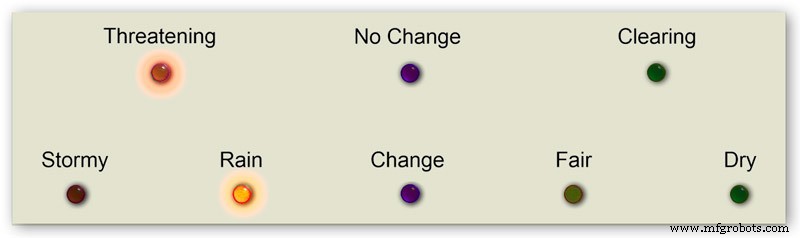
Stap 2:Barometerdemo voorspellen van een storm

Deze time-lapse-animatie laat zien hoe de Barometer-wijzers en de voorspelde LED's reageren op een naderende storm.
Stap 3:Kiezen met uitgebreid bereik
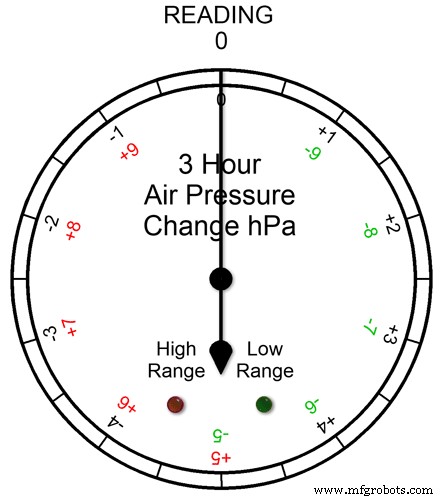
Alle drie de wijzerplaten hebben een groter bereik. Dit zorgt voor een grotere weergegeven resolutie op de wijzerplaten voor normaal weer. Bij extreme weersomstandigheden schakelen de wijzerplaten naar een groter bereik.
De animatie pic1. laat zien hoe de LED's oplichten wanneer het uitgebreide bereik in werking is. De rode LED geeft aan wanneer de meting +5 en hoger is. U zou dan de rode schaalletters lezen. De groene LED geeft aan wanneer de meting -5 of lager is. U zou dan de groene schaalbelettering lezen. Als de aflezing buiten het uitgebreide bereik valt, bijvoorbeeld op deze wijzerplaat boven +9 of -9 zullen beide LED's oplichten om dit aan te geven - zie volgende sectie.
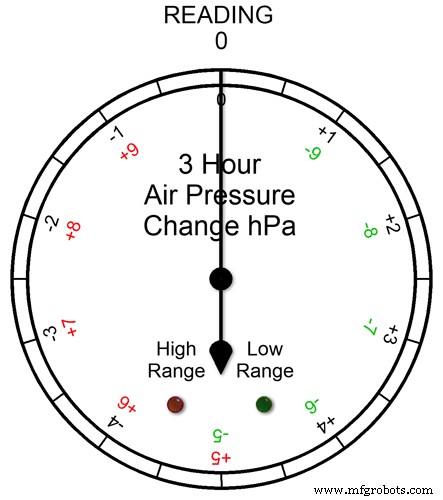
Drukmetingen over uitgebreid bereik Afb.2 Als de drukmeting buiten het uitgebreide bereik + of - valt, zullen beide LED's oplichten om u te waarschuwen dat er extreme metingen of veranderingen hebben plaatsgevonden. De wijzerplaten zullen nog steeds de aflezingen weergeven, bijvoorbeeld op de 3-uurs wijzerplaat als de aflezing -10 was, dan zou de wijzerplaat naar 0 wijzen met beide LED's verlicht. Als de aflezing van 3 uur -11 was, zou de wijzerplaat naar -1 wijzen met beide LED's verlicht. Je telt er gewoon 10 bij op.
In de onderstaande animatie begint het drukverschil van 3 uur bij 0 en wordt het drukverschil kleiner. Bij -5 hPa licht de groene LED op om aan te geven dat het negatieve uitgebreide bereik in gebruik is. De drukverandering blijft dalen totdat deze -10hPa bereikt. Dit is nu over het uitgebreide bereik, dus de Rode LED brandt ook. De druk daalt dan weer tot -11hPa en beide LED's blijven branden. De drukverandering begint af te nemen tot -10 hPa en ook dit is nog steeds over het uitgebreide bereik, dus beide LED's blijven branden. Zodra de drukverandering tot onder -10 daalt, gaat de rode LED uit om aan te geven dat het uitgebreide bereik weer in gebruik is.
Ik heb het uitgebreide bereik in de wijzerplaten ingesteld nadat ik de extreme weersomstandigheden in het VK had gecontroleerd en hoewel ik verwachtte dat het uitgebreide bereik van 3 uur en 6 uur zou worden gebruikt, dacht ik niet dat het uitgebreide bereik ooit zou worden gebruikt op het hoofdscherm van de barometer.
Pic.3 Tijdens het prototypen van de barometer in januari 2020 was er een recordhoogte van 1050hPa in het zuiden van Engeland. Mijn hoofdbarometer ging in het uitgebreide bereik met de wijzer op de rode 1050 en de rode LED voor het hoge bereik brandde.
Stap 4:LCD-informatiedisplays
3 uur
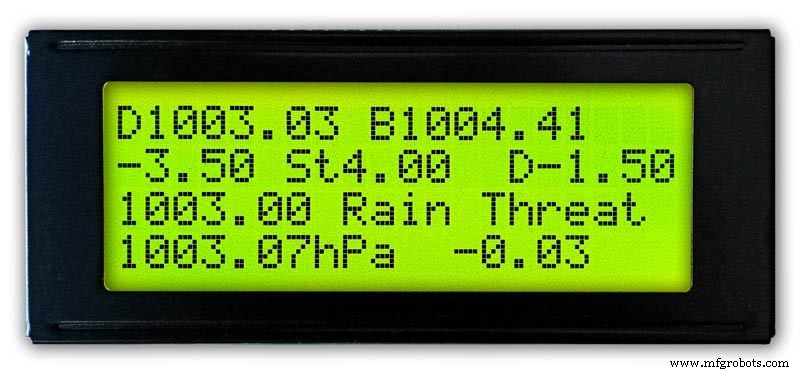
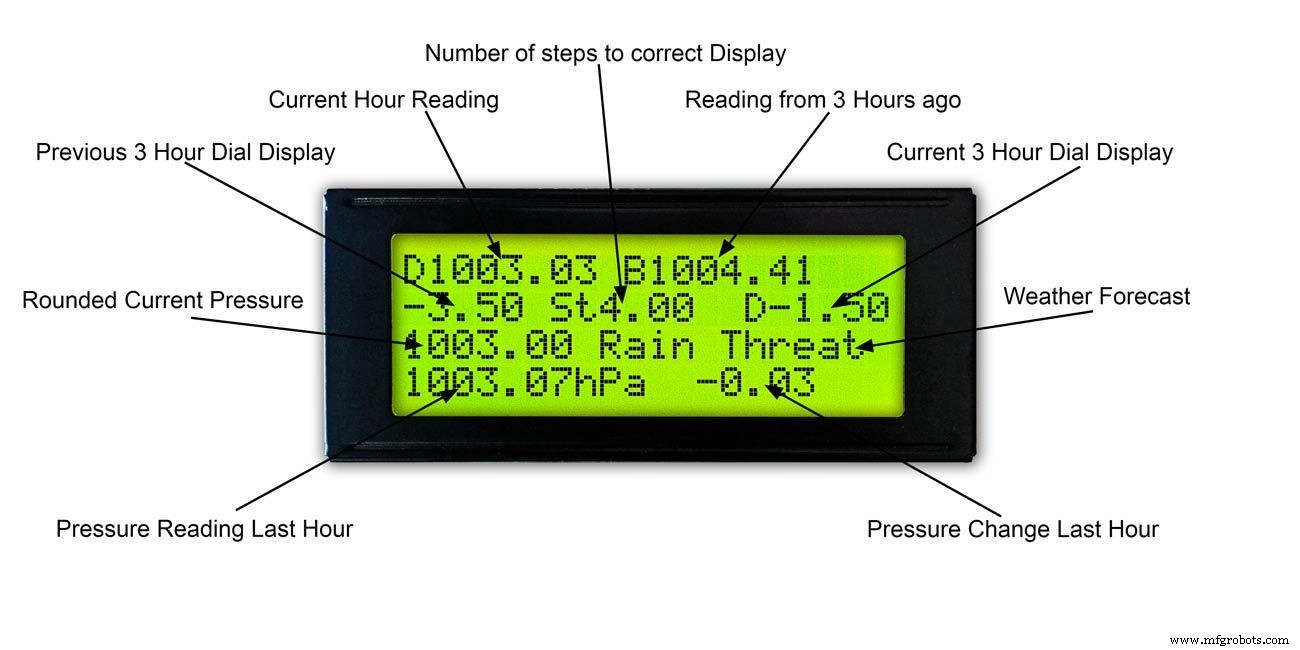
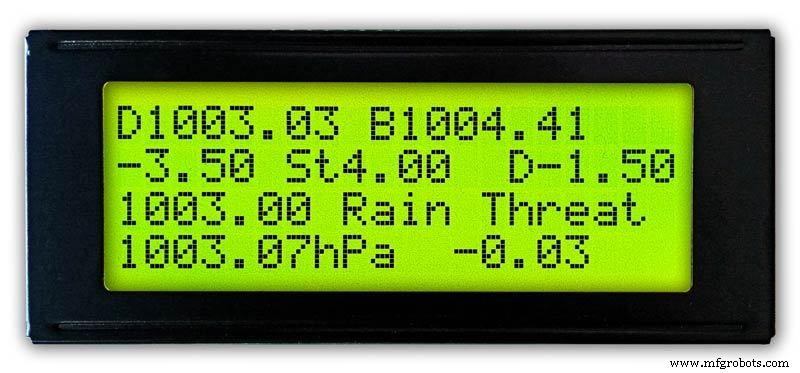
Pic.1 &2 Dit display toont de 3-uurs aflezingen en informatie over de 3-uurs wijzerplaat. Het toont ook de weersvoorspelling op basis van de huidige en de laatste 3 uur meting.
6 uur
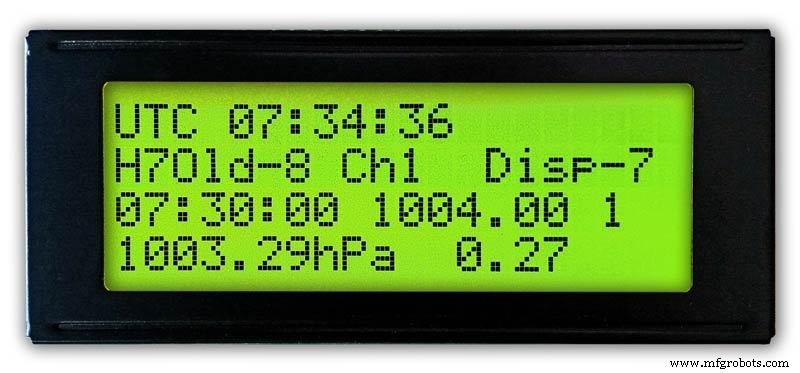
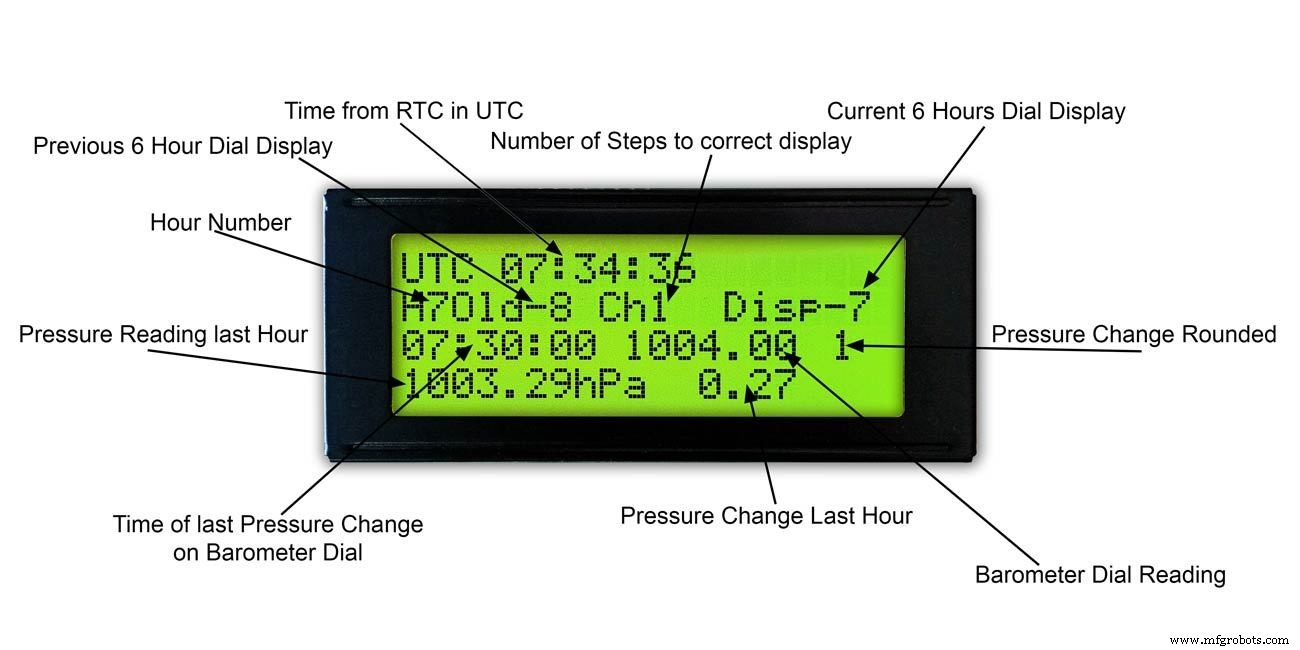
Afb. 3 &4 Dit display toont de aflezingen van de hoofdbarometerwijzerplaat en ook de 6-uursaflezingen.
Stap 5:Het weer voorspellen

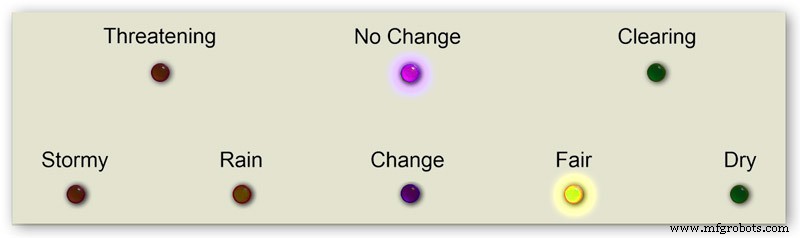
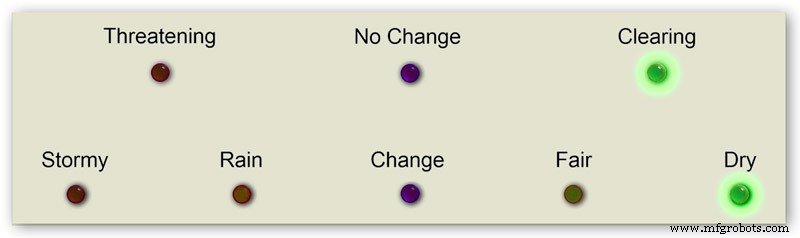

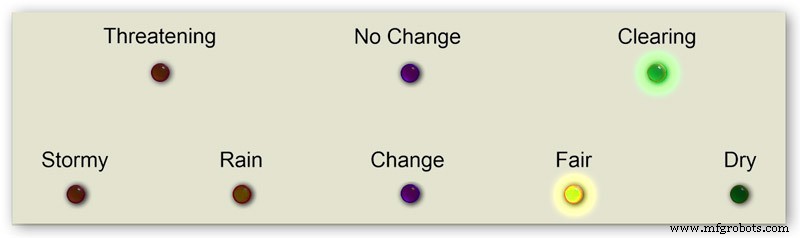
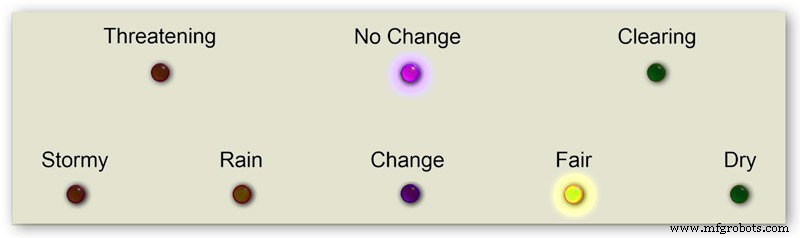
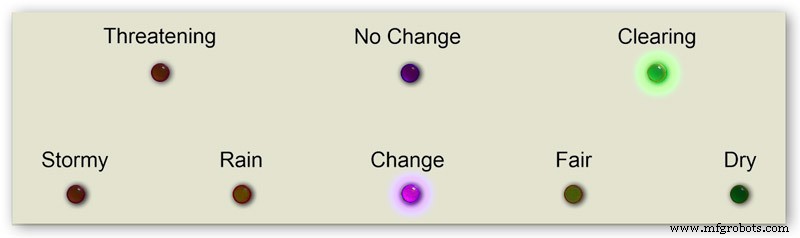
De weersvoorspelling op mijn barometer gebruikt 8 LED's.
Met behulp van de huidige luchtdruk en veranderingssnelheid van de afgelopen 3 uur wordt het weer voorspeld op de LED's.
Animatie 1 toont de verschillende combinaties van voorspelde LED-combinaties.
Ik heb een aantal weersites bezocht en heb de volgende informatie verzameld over het voorspellen van het weer met een barometer.
Het weer voorspellen met de barometer
Meer specifiek kan een barometer met uitlezingen in hPa op deze manier worden geïnterpreteerd:
Als de meetwaarde hoger is dan 1022 hPa
Stijgende of constante druk betekent aanhoudend mooi weer. Langzaam dalende druk betekent mooi weer. Snel dalende druk betekent bewolkt en warmere omstandigheden.
Als het tussen 1009–1022 hPa valt
Stijgende of constante druk betekent dat de huidige omstandigheden zullen voortduren. Langzaam dalende druk betekent weinig verandering in het weer. Snel dalende druk betekent dat er kans is op regen, of sneeuw als het koud genoeg is.
Als de meetwaarde lager is dan 1009 hPa
Stijgende of constante druk duidt op opklaring en koeler weer. Langzaam dalende druk geeft regen aan Snel dalende druk geeft aan dat er een storm op komst is.
Door de informatie boven mijn barometer te gebruiken, wordt de volgende logica toegepast om het weer te voorspellen.
Logica wordt toegepast in de onderstaande volgorde, waarbij de resulterende LED's branden.
Afb.2 Luchtdruk <1009 hPa
Stijgende of constante druk duidt op opklaring en koeler weer
Luchtdruk <1009.00 en 3 uur verandering>=0
Afb.3 Luchtdruk <1009 hPa
Langzaam dalende druk duidt op regen
Luchtdruk <1009.00 en 3 uur verandering <0 en 3 uur verandering>=-1,5
Afb.4 Luchtdruk <1009 hPa
Snel dalende druk geeft aan dat er een storm op komst is.
Luchtdruk <1009.00 en 3 uur verandering <-1,5
Afb.5 Luchtdruk ligt tussen 1009 en 1022 hPa
Stijgende of constante druk betekent dat de huidige omstandigheden zullen voortduren.
Langzaam dalende druk betekent weinig verandering in het weer.
Luchtdruk>=1009.00 en luchtdruk <=1022,00 en 3 uur verandering>=-1,5 en 3 uur verandering <=1,5
Afb.6 Luchtdruk ligt tussen 1009 en 1022 hPa
Luchtdruk die snel stijgt, betekent dat het weer opklaart
Luchtdruk>=1009,00 en luchtdruk <=1022,00 en 3 uur wisselen> 1,5
Afb.7 Luchtdruk ligt tussen 1009 en 1022 hPa
Snel dalende druk betekent dat er kans is op regen, of sneeuw als het koud genoeg is.
Luchtdruk>=1009,00 en luchtdruk <=1022,00 en 3 uur verandering <-1,5
Afb.8 Luchtdruk boven 1022 hPa
Stijgende of constante druk betekent droog weer.
Luchtdruk> 1022,00 en 3 uur wisselen>=0
Afb.9 Luchtdruk boven 1022 hPa
Langzaam dalende druk betekent mooi weer.
Luchtdruk> 1022,00 en 3 uur verandering <0 en 3 uur verandering>=-1,5
Afb.10 Luchtdruk boven 1022 hPa
Snel dalende druk betekent verandering
Luchtdruk> 1022,00 &&3 uur verandering <-1,5
Stap 6:Barometer opstarten
Bij de eerste keer opstarten wordt een LED-test uitgevoerd.
Eenmaal voltooid, gaan de wijzers naar hun oorspronkelijke instellingen, klaar om te worden gekalibreerd.
Stap 7:Initiële opstartinstellingen RTC
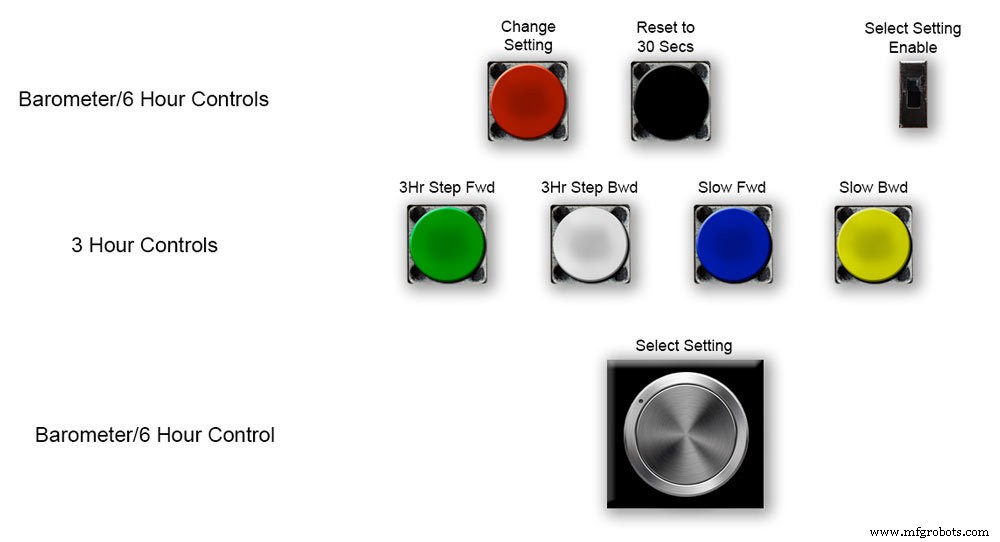






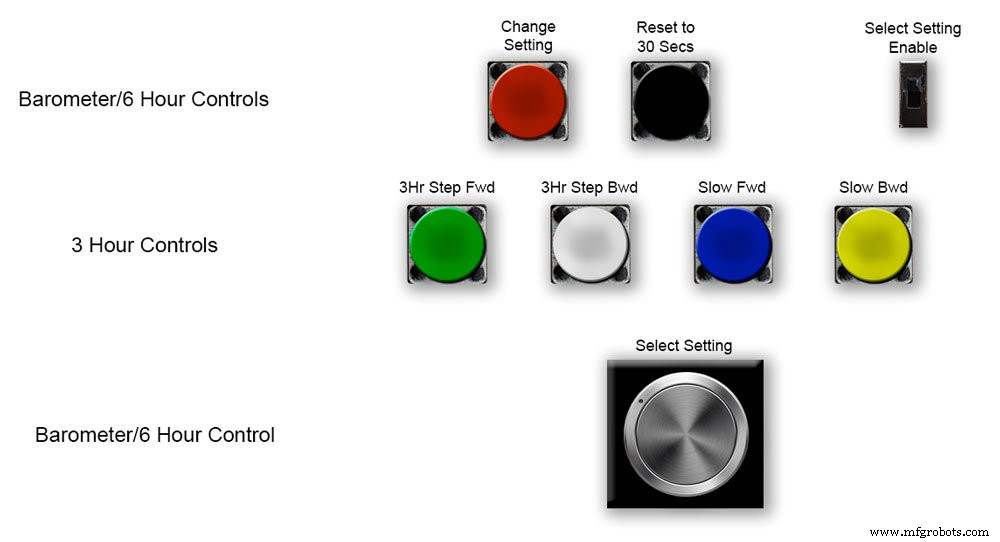
Afb.1 Bij de eerste keer opstarten moet de barometer worden ingesteld met behulp van de bedieningselementen op het Vero-bord.
RTC
Afb.2 De RTC moet op de juiste tijd worden ingesteld. Ik stel hem in op UTC en verander niet naar zomertijd. Noteer voor het instellen van de tijd de "Disp"-waarde, in dit geval -5. Dit is de waarde van de 6-uurwijzer en is later nodig bij het instellen. Schuif de schakelaar "Select Setting Enable" naar de positie Aan. Het display verandert niet.
Afb.3 Draai de knop "Instelling selecteren" langzaam met de klok mee en de 2e rij van het hoofd-LCD-scherm verandert.
Stop wanneer het display "RTC Hour Retard" toont. Als u de RTC-uren wilt vertragen, drukt u op de rode "change setting"-knop. Met een enkele klik gaan de uren achteruit. Meerdere klikken verminderen het aantal ingedrukte klikken, maar het duurt een seconde om de RTC bij te werken.
Afb.4 Als u de knop "Instelling selecteren" verder draait, verandert de weergave in "RTC Hour Advance"
Als u de RTC-uren wilt vervroegen, drukt u op de rode knop "instelling wijzigen". Met een enkele klik gaan de uren vooruit. Meerdere klikken verhogen het aantal ingedrukte klikken, maar het duurt een seconde om de RTC bij te werken.
Afb.5 Als u de knop "Instelling selecteren" verder draait, verandert de weergave in "RTC Min Retard"
Als u de RTC-minuten wilt vertragen, drukt u op de rode knop "Instelling wijzigen". Met een enkele klik gaan de minuten achteruit. Meerdere klikken verminderen het aantal ingedrukte klikken, maar het duurt een seconde om de RTC bij te werken.
Afb.6 Als u de knop "Instelling selecteren" verder draait, verandert de weergave in "RTC Min Advance"
Als u de RTC-minuten wilt vervroegen, drukt u op de rode knop "Instelling wijzigen". Met een enkele klik gaan de minuten vooruit. Bij meerdere klikken wordt het aantal ingedrukte klikken naar voren geschoven, maar het duurt een seconde om de RTC bij te werken.
Afb.7 Zodra u de RTC-instelling of een andere instelling hebt voltooid, draait u de knop "Instelling selecteren" volledig tegen de klok in totdat het display "Uit" weergeeft
Schuif de "Select Setting Enable"-schakelaar naar de Uit-positie.
Opmerking. De seconden kunnen op elk moment worden gesynchroniseerd tot 30 seconden door op de zwarte knop "Reset naar 30 seconden" te drukken. De tijd wordt nu onthouden op de RTC als de stroom wordt uitgeschakeld.
Stap 8:Initiële opstartinstellingen 6-uurwijzer






De 6-uurwijzer instellen
Afb.1 Zodra de RTC is ingesteld, moeten de wijzers van de barometer en de luchtdruk van 6 uur worden ingesteld.
Schuif de schakelaar "Select Setting Enable" naar de positie Aan. Het display verandert niet.
Draai de knop "Instelling selecteren" langzaam met de klok mee totdat "6Hr Baro Inch Retard" wordt weergegeven.
Bij de allereerste keer opstarten moet de 6-uurwijzer op het dichtstbijzijnde cijfer worden gekalibreerd.
Als het dichtstbijzijnde cijfer zich achter de wijzer bevindt, drukt u op de rode knop "instelling wijzigen". Met een enkele klik gaat de hand stap voor stap achteruit. Als u de knop ingedrukt houdt, gaat de hand herhaaldelijk achteruit. Zodra de hand precies op een cijfer staat, laat u de knop los.
Afb.2 Als het dichtstbijzijnde cijfer voor de hand is of als u de wijzer inch heeft vertraagd door het bovenstaande te veel te gebruiken, draait u de "Select Setting"-knop met de klok mee totdat "6Hr Baro Inch Advn" wordt weergegeven.
Druk op de rode knop "instelling wijzigen". Met een enkele klik gaat de hand stap voor stap naar voren. Als u de knop ingedrukt houdt, gaat de hand herhaaldelijk naar voren. Zodra de hand precies op een cijfer staat, laat u de knop los.
Afb.3 Zodra de 6-uurwijzer precies op een cijfer is ingesteld, moet de uurwijzer op de juiste waarde worden ingesteld.
Voordat u de RTC aanpaste, heeft u dit nummer -5 genoteerd.
Afb.4 Als de 6-uurs wijzer te geavanceerd is.
Draai de knop "Instelling selecteren" met de klok mee totdat "6Hr Baro Retard" wordt weergegeven. Druk kort op de rode knop "Instelling wijzigen". Deze dorpel stap de 6-uurswijzer 1 hele eenheid achteruit. Stop wanneer de 6-uurwijzer uw genoteerde nummer bereikt.
Afb.5 Als de wijzer van de 6-uursweergave achterlijk is.
Draai de knop "Select Setting" met de klok mee totdat "6Hr Baro Advance" wordt weergegeven. Druk kort op de rode knop "Instelling wijzigen". Deze dorpel zet de 6-uurwijzer 1 hele eenheid vooruit. Stop wanneer de 6-uurwijzer uw genoteerde nummer bereikt.
Afb.6 Merk op dat de 6-uursweergave 8 uur nodig heeft om correct weer te geven, omdat het gedurende die periode de meetwaarden in het geheugen moet opslaan.
U kunt altijd de vorige luchtdrukmetingen aan de code toevoegen voordat u deze laadt, als u de 6-uursweergave nodig heeft om vanaf het opstarten te functioneren.
De code converteert de uren naar een H-getal zoals weergegeven hierboven H =6. In de coderegel 128 betekent H6 dat de huidige uuraflezing onder uur6 moet worden geplaatst, de vorige aflezing in uur7 de aflezing daarvoor in uur0 enz.
int uur0 =1015;
int uur1 =1016
;int uur2 =1015;
int hour3 =1016;
int uur4 =1016
;int uur5 =1016;
int uur6 =1012;
int uur7 =1013;
U zou uw lokale metingen van internet moeten kunnen halen.
Ik heb een pagina van mijn weerstation ingesteld, zodat ik dit kan controleren terwijl ik de barometer aan het maken ben.
Klik op deze link om de uurlijkse wijzigingen in Kenley Surrey VK te zien.
Stap 9:Initiële opstartinstellingen Hoofdbarometerwijzer




De hoofdbarometerwijzer instellen
Afb.1 Nu de 6-uursweergave correct is, moet de hoofdbarometerwijzer worden ingesteld op de afgeronde druk op zeeniveau op de 3e rij beneden op het hoofd-LCD.
Bij de allereerste keer opstarten moet de hoofdbarometerwijzer op het dichtstbijzijnde cijfer worden gekalibreerd. Draai de knop "Select Setting" rechtsom totdat "Baro Inch Retard" wordt weergegeven.
Als het dichtstbijzijnde cijfer zich achter de wijzer bevindt, drukt u op de rode knop "instelling wijzigen". Met een enkele klik gaat de hand stap voor stap achteruit. Als u de knop ingedrukt houdt, gaat de hand herhaaldelijk achteruit. Zodra de hand precies op een cijfer staat, laat u de knop los.
Afb.2 Als het dichtstbijzijnde cijfer voor de hand is of als u de wijzer inch heeft vertraagd door het bovenstaande te veel te gebruiken, draait u de "Select Setting"-knop met de klok mee totdat "Baro Inch Advn" wordt weergegeven.
Druk op de rode knop "instelling wijzigen".
Met een enkele klik gaat de hand stap voor stap naar voren. Als u de knop ingedrukt houdt, gaat de hand herhaaldelijk naar voren. Zodra de hand precies op een cijfer staat, laat u de knop los.
Afb.3 Als de hoofdbarometerwijzer te geavanceerd is.
Draai de knop "Select Setting" rechtsom totdat "Barometer Retard" wordt weergegeven.
Druk kort op de rode knop "Instelling wijzigen".
Dit zal de hand van de hoofdbarometer 1 hele eenheid achteruit zetten. Stop wanneer de uurwijzer de aangegeven afgeronde druk op zeeniveau bereikt.
Afb.4 Als de wijzer van de hoofdbarometer achterblijft in vergelijking met de door u aangegeven afgeronde druk op zeeniveau.
Draai de knop "Select Setting" rechtsom totdat "Barometer Advance" wordt weergegeven.
Druk kort op de rode knop "Instelling wijzigen".
Hierdoor wordt de hoofdbarometerwijzer 1 hele eenheid naar voren geschoven. Stop wanneer de hand de aangegeven afgeronde druk op zeeniveau bereikt.
Stap 10:Initiële opstartinstellingen 3 uurwijzer
De 3-uurwijzer instellen.
Oic.1 Aanpassing van de 3-uurwijzer is door de vier knoppen Groen, Wit, Blauw en Geel op het Vero-bord.
Bij de eerste keer opstarten moet de 3-uurwijzer worden gekalibreerd naar de dichtstbijzijnde eenheid of halve eenheid.
Afb.2 Als de dichtstbijzijnde eenheidswaarde van de 3 uurwijzer vóór de 3 uurwijzer ligt, drukt u op de gele "Slow Bwd"-knop om de wijzer achteruit te bewegen. Als u de knop ingedrukt houdt, gaat de hand herhaaldelijk achteruit.
Als de dichtstbijzijnde eenheidswaarde van de 3-uurwijzer achter de 3-uurwijzer ligt, drukt u op de blauwe "Slow Fwd"-knop om de wijzer naar voren te bewegen. Als u de knop ingedrukt houdt, gaat de hand herhaaldelijk naar voren.
Zodra de 3-uurwijzer precies op een eenheid/halve eenheid staat, kan de wijzer worden ingesteld op de waarde "D" op het 3-uurs LCD-scherm.
Als de wijzer voor de waarde "D" ligt, drukt u op de witte "3Hr Step Bwd"-knop om de 3-uurwijzer in halve eenheden achteruit te zetten.
Als de hand in minder dan de waarde "D" is, drukt u op de groene knop "3Hr Step Fwd" om de 3-uurwijzer in halve eenheden vooruit te zetten.
Houd er rekening mee dat de weergave van 3 uur 4 uur nodig heeft om correct weer te geven, omdat de meetwaarden gedurende die periode in het geheugen moeten worden opgeslagen.
U kunt altijd de vorige luchtdrukmetingen aan de code toevoegen voordat u deze laadt, als u de voorspelling en 3 uurweergave nodig heeft om vanaf het opstarten te functioneren.
3 uur weergavecode op regel 124
float hour0 is het huidige uur
float uur1 is vorig uur etc etc
float uur0 =1036,00;
float uur1 =1036,00;
float uur2 =1036,00;
float uur3 =1036,00;
float uur4 =1036,00;
U zou uw lokale metingen van internet moeten kunnen halen.
Stap 11:Modules/componenten



Modules
Waar mogelijk maakt dit project gebruik van vooraf gebouwde modules om bouw- en ontwerptijd te besparen.
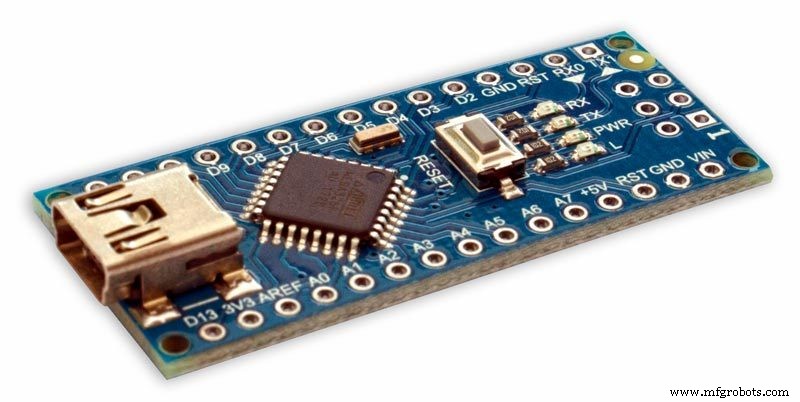
Microprocessors
Dit project maakt gebruik van 2 microprocessors een Atmega 328(UNO) pic.1 en een Arduino Nano pic.2. Ik heb deze combinatie gebruikt omdat ik al een 328 had laten bouwen van een ander project en vanwege de beperkte ruimte op het Vero-bord ook de Nano had toegevoegd.
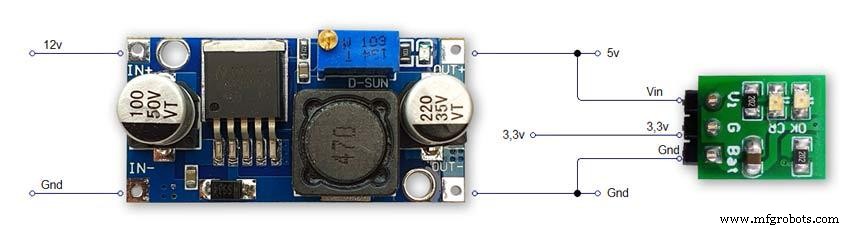
Kracht
De barometer gebruikt ongeveer 65 mA en dit zal een beetje toenemen naarmate elke motor elke 10 minuten tot en met een uur een fractie van een seconde stapt
AMS117 afb.3
De module op dit project is 3.3v en wordt gebruikt om de BMP180-module van stroom te voorzien.
De AMS1117-serie van instelbare en vaste spanningsregelaars is ontworpen om een uitgangsstroom van maximaal 1A te leveren en om te werken tot een ingangs-naar-uitgangsverschil van 1V. De uitvalspanning van het apparaat is gegarandeerd maximaal 1,3 V, afnemend bij lagere belastingsstromen. On-chip trimmen past de referentiespanning aan tot 1,5%. De stroomlimiet is ingesteld om de spanning onder overbelasting van zowel de regelaar als de stroombron te minimaliseren. De module op dit project is 3.3v en wordt gebruikt om de BMP180-module van stroom te voorzien.
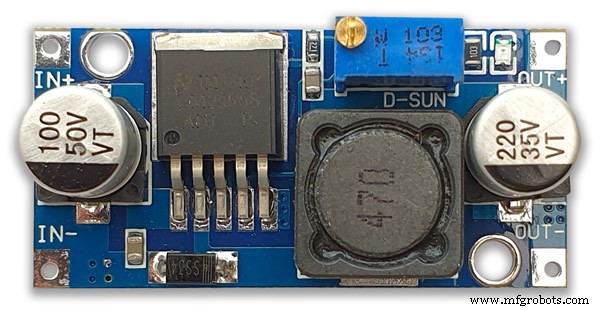
LM2596 Buck DC naar DC Converter 3.0-40V naar 1.5-35V pic.4Deze module converteert de 12v input naar 5v
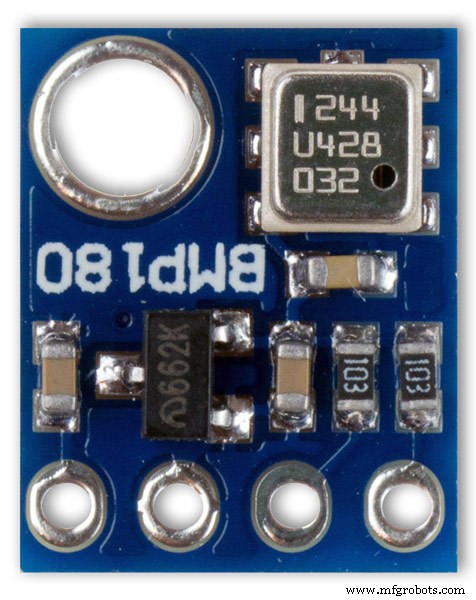
BMP180 Druksensormodule 2 uit afb.5 De BMP180 Breakout is een luchtdruksensor met een I2C ("Wire") interface. Luchtdruksensoren meten de absolute druk van de lucht eromheen. Deze druk varieert met zowel het weer als de hoogte. Afhankelijk van hoe je de gegevens interpreteert, kun je veranderingen in het weer volgen, hoogte meten of andere taken die een nauwkeurige drukmeting vereisen.
Sluit de +, -, CL en DA pinnen aan op je Arduino.
CL gaat naar SCL en DA gaat naar SDA.
BELANGRIJK:Sluit de voedingspinnen (+ en -) ALLEEN aan op een voeding van 3,3 V. Hogere spanningen zullen het onderdeel permanent beschadigen. Merk op dat omdat I2C open drain-drivers gebruikt, het veilig is om de I2C-pinnen (DA en CL) aan te sluiten op een I2C-poort op een 5V-microprocessor.
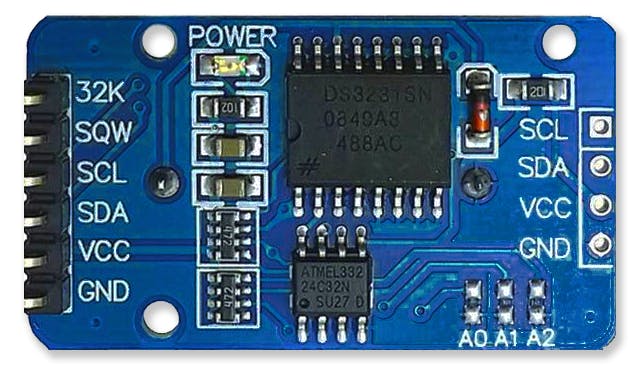
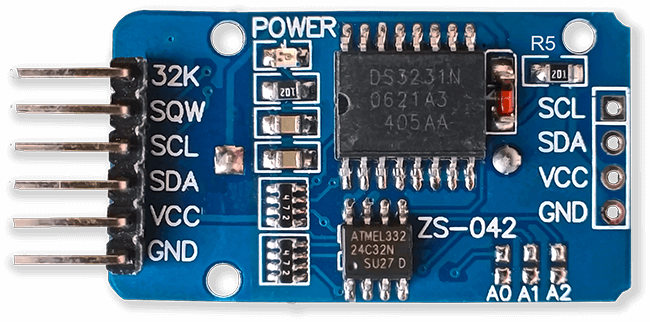
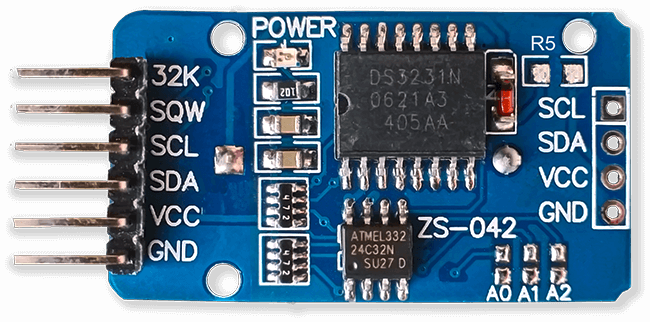
RTC real-time klok pic.6
Deze brometer maakt gebruik van een DS3231 AT24C32 I2C Precision Real Time Clock-module.
Deze module wordt voornamelijk gebruikt voor timing, maar levert ook tijdstempels op het LCD-scherm. De tijd is ingesteld op UTC en wordt niet gewijzigd voor zomertijd. De module wordt geleverd met een oplaadbare lithium-ionbatterij, zie bovenstaande afbeelding. Ik gebruik een niet-oplaadbare batterij, dus heb weerstand R5 uit de module verwijderd, zie de sectie RTC-modificatie voor details.
Stappenmotoren 3 uit De barometer maakt gebruik van 3 Nema 17 stappenmotoren 1A, 13N.cm houdkoppel, 4-lead, 1.8° Ik gebruikte 1.8° motoren omdat de stappen 200 keer precies in 360° passen. U kunt desgewenst Nema 8-motoren gebruiken, maar gebruik geen 28BYJ-48-5V-motoren omdat deze niet de vereiste staphoek van 1,8° hebben.
De staphoek van 1,8° is vereist omdat deze zich precies in 360° verdeelt voor mijn barometerwijzerplaten.
LCD-schermen 2 uit
Ik heb 2 20x4 LCD-schermen gebruikt, één voor de barometer, klok en 6-uursweergave en de andere voor de 3-uursweergave en voorspelling.
Stap 12:Modules/Componenten A4988 Stappenmotor Driver
A4988 microstepping bipolaire stappenmotor driver 3 uit
Belangrijk lees dit gedeelte aandachtig
Mijn barometer is ingesteld op 1/16e staprotatie en de code wordt dienovereenkomstig aangepast.
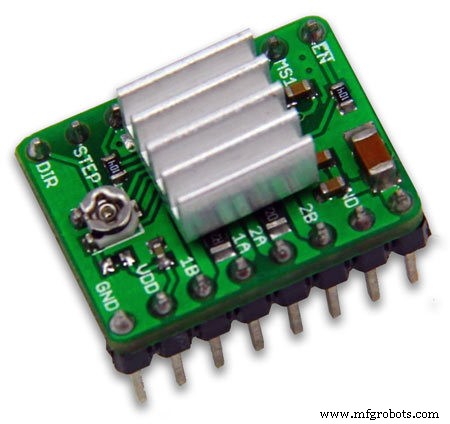
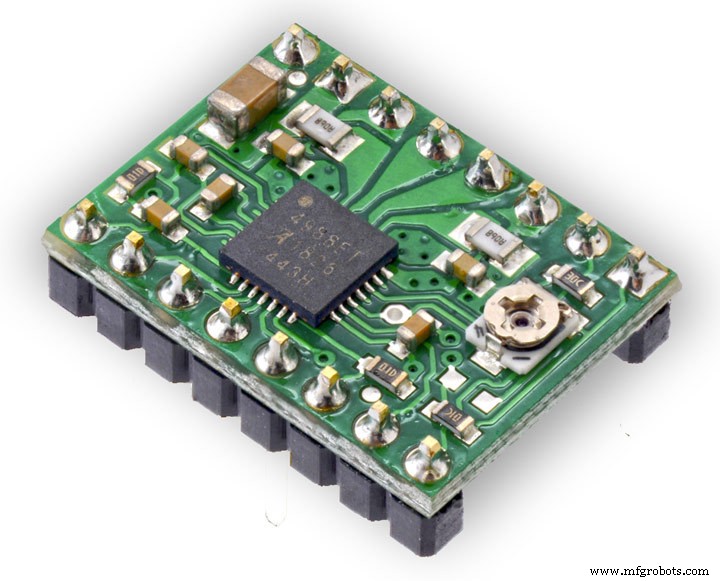
A4988 microstepping bipolaire stappenmotor driver pic.1 met en pic.2 zonder koellichaam
Dit breakout-bord voor Allegro's A4988 microstepping bipolaire stappenmotordriver heeft instelbare stroombegrenzing, overstroom- en oververhittingsbeveiliging en vijf verschillende microstapresoluties (tot 1/16-stap).
Hij werkt van 8 V tot 35 V en kan tot ongeveer 1 A per fase leveren zonder koellichaam of geforceerde luchtstroom (hij is geschikt voor 2 A per spoel met voldoende extra koeling).
Hier zijn enkele van de belangrijkste kenmerken van de bestuurder:Eenvoudige stap- en richtingsbesturingsinterface Vijf verschillende stapresoluties:volledige stap, halve stap, kwartstap, achtste stap en zestiende stap Met de instelbare stroomregeling kunt u de maximale stroomuitvoer instellen met een potentiometer, waarmee u spanningen boven de nominale spanning van uw stappenmotor kunt gebruiken om hogere stapsnelheden te bereiken Intelligente hakregeling die automatisch de juiste stroomafnamemodus selecteert (snelle afname of langzaam verval) Thermische uitschakeling bij te hoge temperatuur, vergrendeling bij te lage spanning en crossover-stroombeveiliging Kortsluiting-naar-aarde en kortsluitbeveiliging
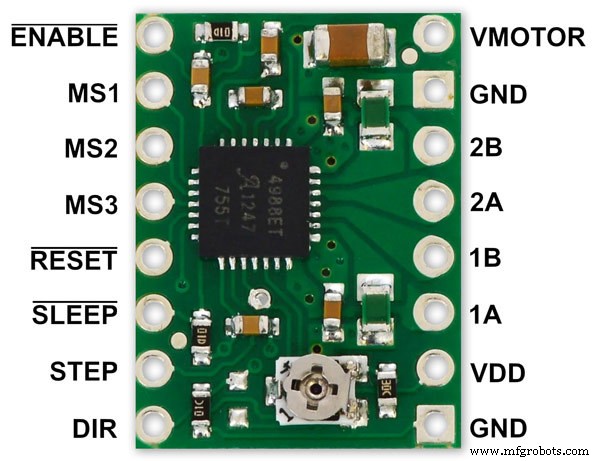
Stroomaansluitingen De driver vereist dat een logische voedingsspanning (3 - 5,5 V) wordt aangesloten op de VDD- en GND-pinnen en een motorvoedingsspanning (8 - 35 V) wordt aangesloten op VMOT en GND. Deze voedingen moeten geschikte ontkoppelcondensatoren dicht bij het bord hebben en ze moeten in staat zijn om de verwachte stromen te leveren (pieken tot 4 A voor de motorvoeding).
Waarschuwing:dit draagbord maakt gebruik van keramische condensatoren met een laag ESR, waardoor het gevoelig is voor destructieve LC-spanningspieken, vooral bij gebruik van stroomkabels die langer zijn dan enkele centimeters. Onder de juiste omstandigheden kunnen deze pieken de maximale spanning van 35 V voor de A4988 overschrijden en het bord permanent beschadigen, zelfs wanneer de voedingsspanning van de motor zo laag is als 12 V. Een manier om de bestuurder te beschermen tegen zulke pieken zijn om een grote (minstens 47 µF) elektrolytische condensator over het motorvermogen (VMOT) te plaatsen en ergens dicht bij het bord te aarden.
Motoraansluitingen
Stappenmotoren met vier, zes en acht draden kunnen door de A4988 worden aangedreven als ze goed zijn aangesloten. Warning:Connecting or disconnecting a stepper motor while the driver is powered can destroy the driver. (More generally, rewiring anything while it is powered is asking for trouble.)
Step (and microstep) size
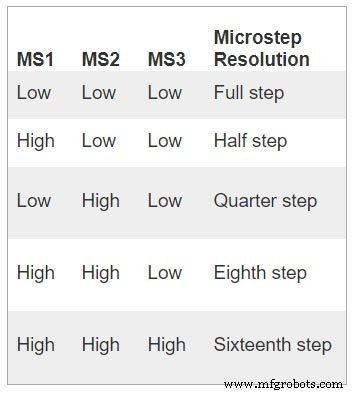
see table pic. 3Stepper motors typically have a step size specification (e.g. 1.8° or 200 steps per revolution), which applies to full steps. A microstepping driver such as the A4988 allows higher resolutions by allowing intermediate step locations, which are achieved by energizing the coils with intermediate current levels. For instance, driving a motor in quarter-step mode will give the 200-step-per-revolution motor 800 microsteps per revolution by using four different current levels.
The resolution (step size) selector inputs (MS1, MS2, and MS3) enable selection from the five step resolutions according to the table below. MS1 and MS3 have internal 100kΩ pull-down resistors and MS2 has an internal 50kΩ pull-down resistor, so leaving these three microstep selection pins disconnected results in full-step mode. For the microstep modes to function correctly, the current limit must be set low enough (see below) so that current limiting gets engaged. Otherwise, the intermediate current levels will not be correctly maintained, and the motor will skip microsteps.
Control inputs
pics 4 &5Each pulse to the STEP input corresponds to one microstep of the stepper motor in the direction selected by the DIR pin. Note that the STEP and DIR pins are not pulled to any particular voltage internally, so you should not leave either of these pins floating in your application.
If you just want rotation in a single direction, you can tie DIR directly to VCC or GND. The chip has three different inputs for controlling its many power states:RST, SLP, and EN. For details about these power states, see the datasheet.
Please note that the RST pin is floating; if you are not using the pin, you can connect it to the adjacent SLP pin on the PCB to bring it high and enable the board.
Current LImiting Before connecting the motor we should adjust the current limiting of the driver so that we are sure that the current is within the current limits of the motor. We can do that by adjusting the reference voltage using the potentiometer on the module to set the VRef.
See details on the video link pic. 6
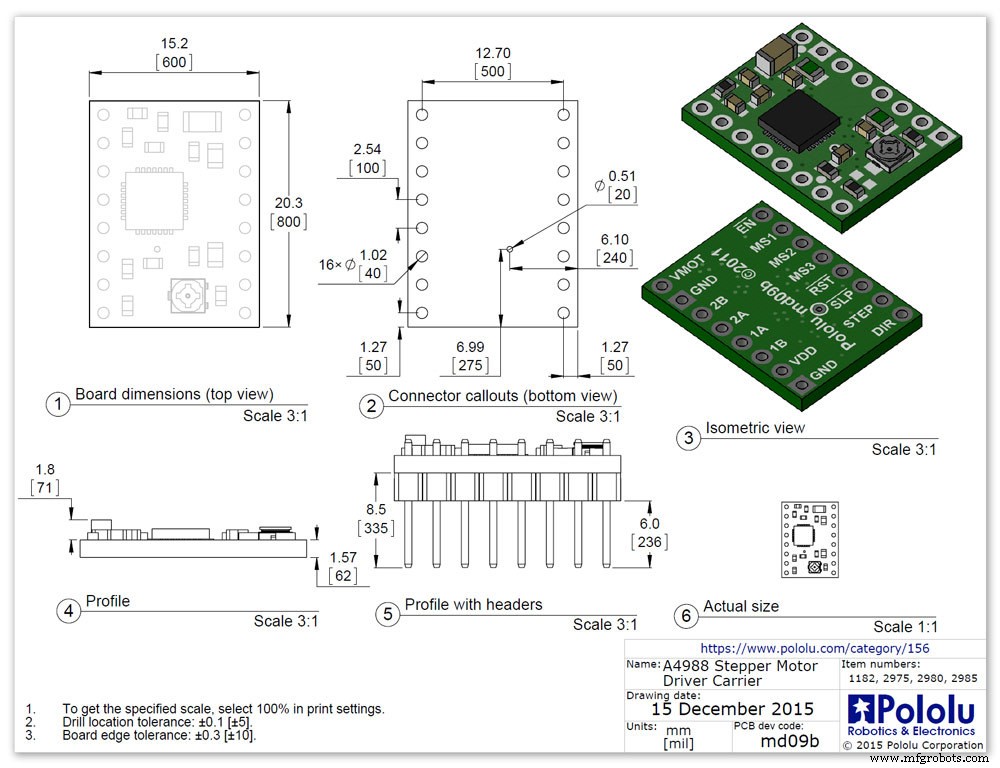
Manufacturers Drawing sheet pic.7
Step 13:Construction Prototyping
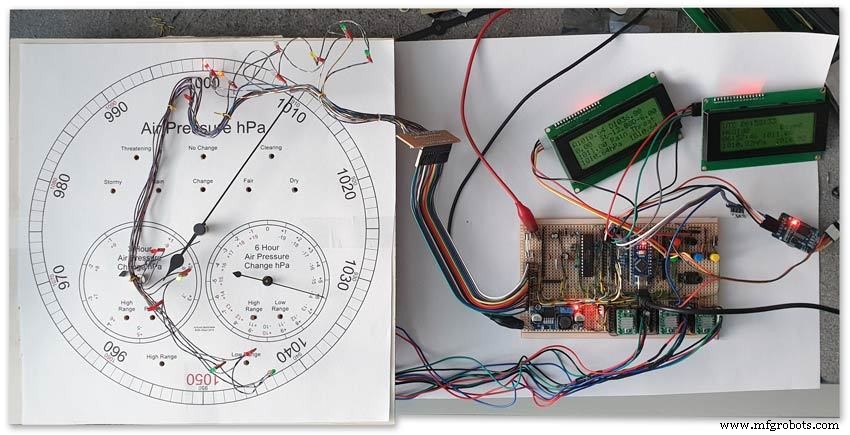
The circuit was prototyped using a hardboard dial with holes drilled for the motor spindles and LEDs.
Various dial designs were then printed on normal paper and Sellotaped over the top. The LED wiring loom was made with the LEDs in position on the temporary dial.
If you are using the round dial design this will allow you to check if the board etc will be mounted on the dial or in the back box.
Step 14:Construction RTC Modification
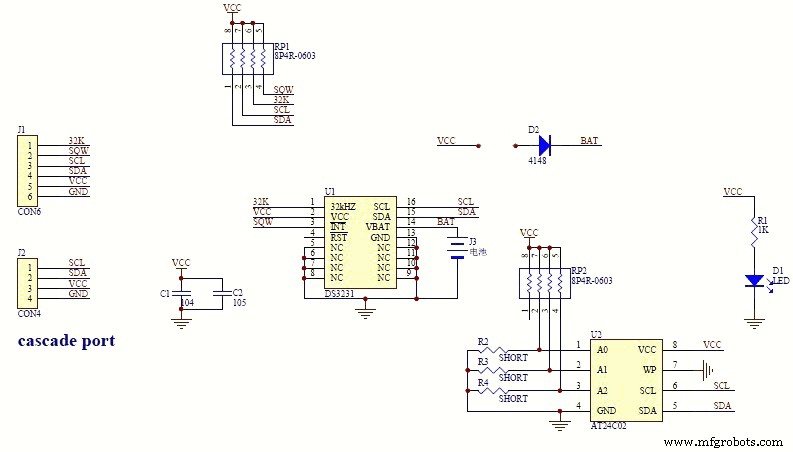
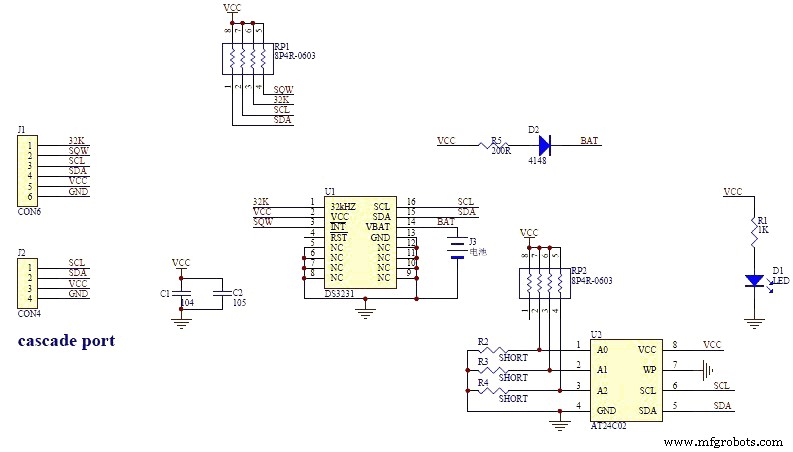
The module comes supplied with a Lithium-Ion rechargeable battery see diagram pic. 2.
I use a non rechargeable battery (I am not happy with the circuit design with a lithium-iron battery and associated fire risk) of the so have removed resistor R5 from the module as below. This stops any charge current to the battery.
Pic.3 shows the module without the resistor (just break it off) and pic.4 the modified circuit.
Step 15:Construction Mounting Modules &Boards

On the modern square dial design all the modules and boards are mounted on the dial. The classic round dial desgn will need some parts mounted in the back box as there is less space on the dial.
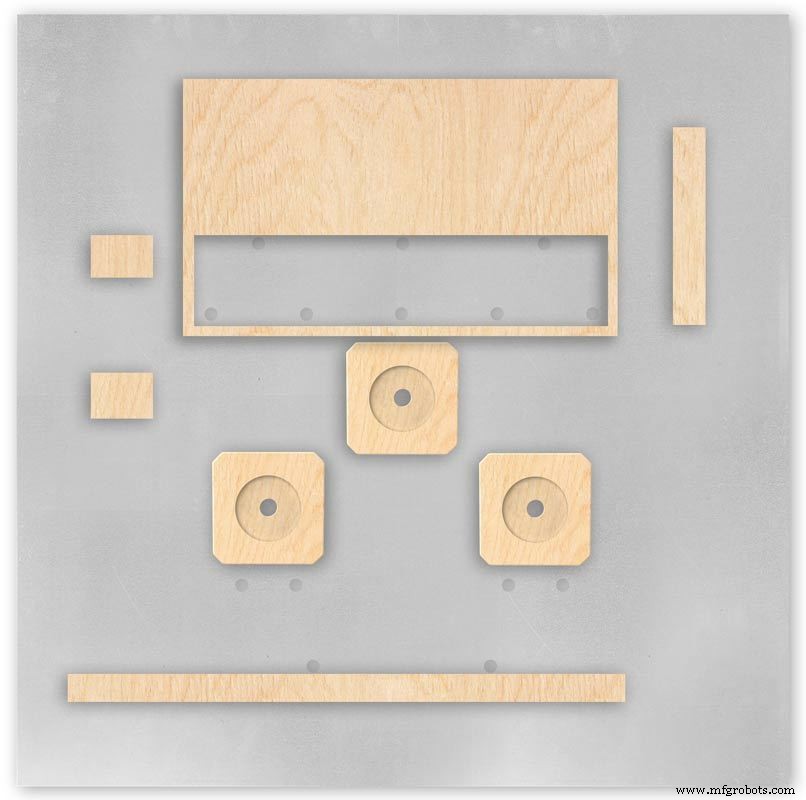
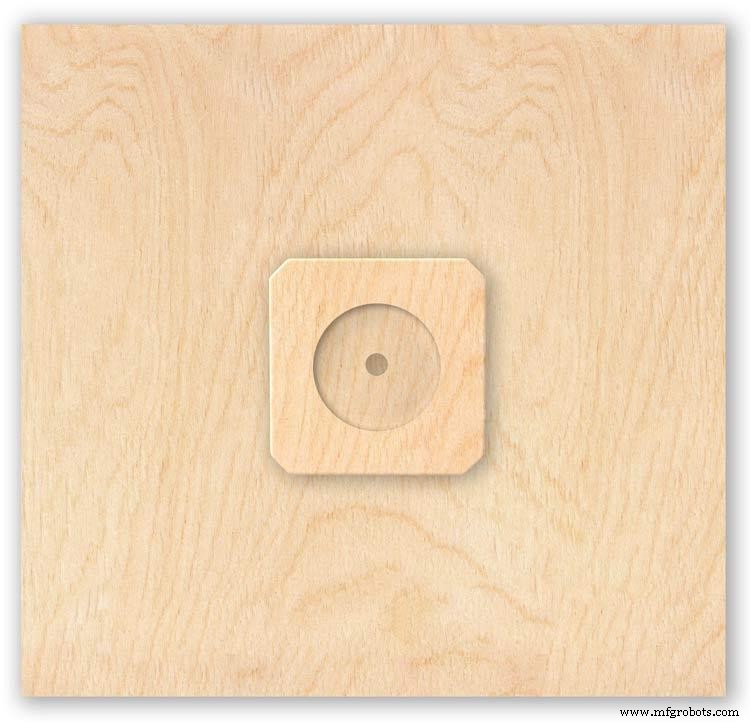
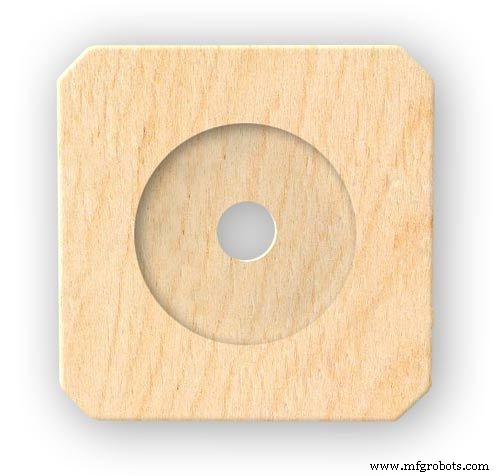
Motors are hot melt glued to wooden mounting blocks pic.1&2. The wooded blocks are cut fron a sheet of plywood pic.3. The mounting blocks depths are set to allow the correct protrusion of the spindles through the dial. I have hot melt glued the blocls to the dial.
The Vero Boards and LCD displays are also screwed to wooden blocks which have been glued to the dial using impact adhesive.
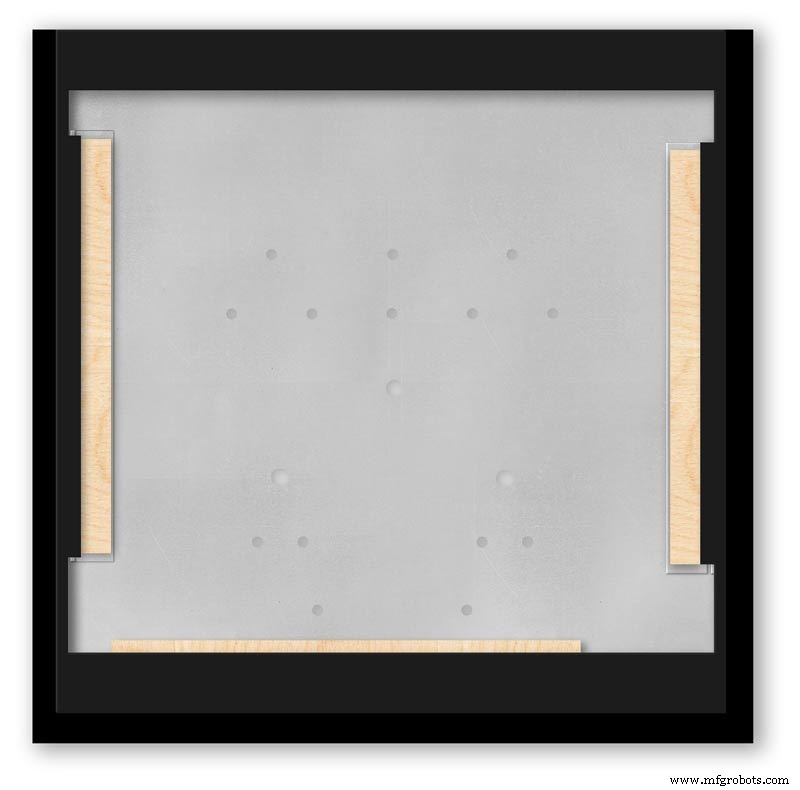
Pic.4 shows the front view with a transparent dial showing mounting locations.
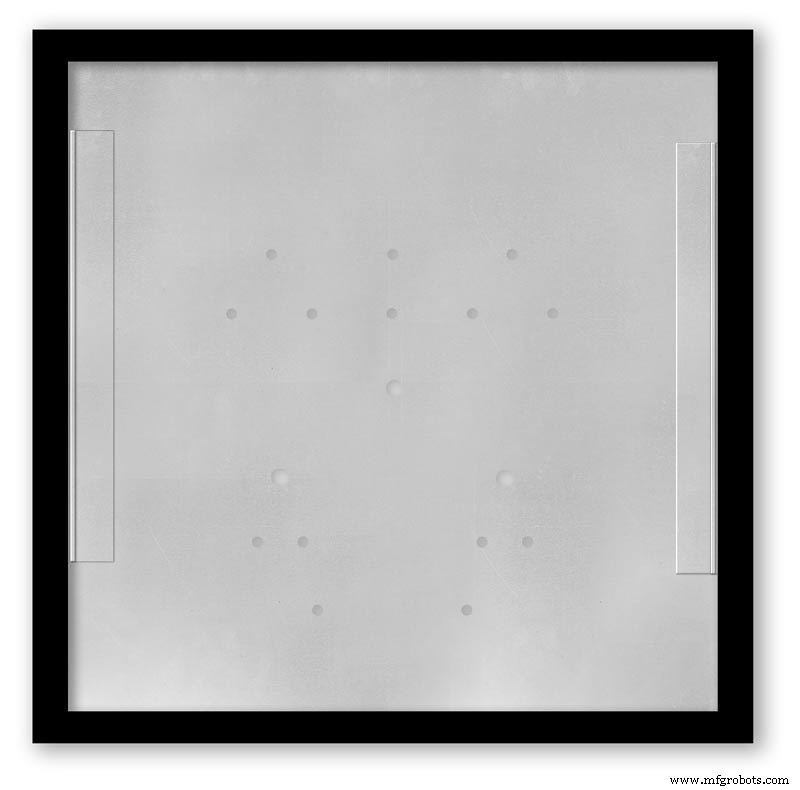
Pic. 5 shows the same but the rear view.
Pic.6 shows the wooden mounting blocks locations and layout.
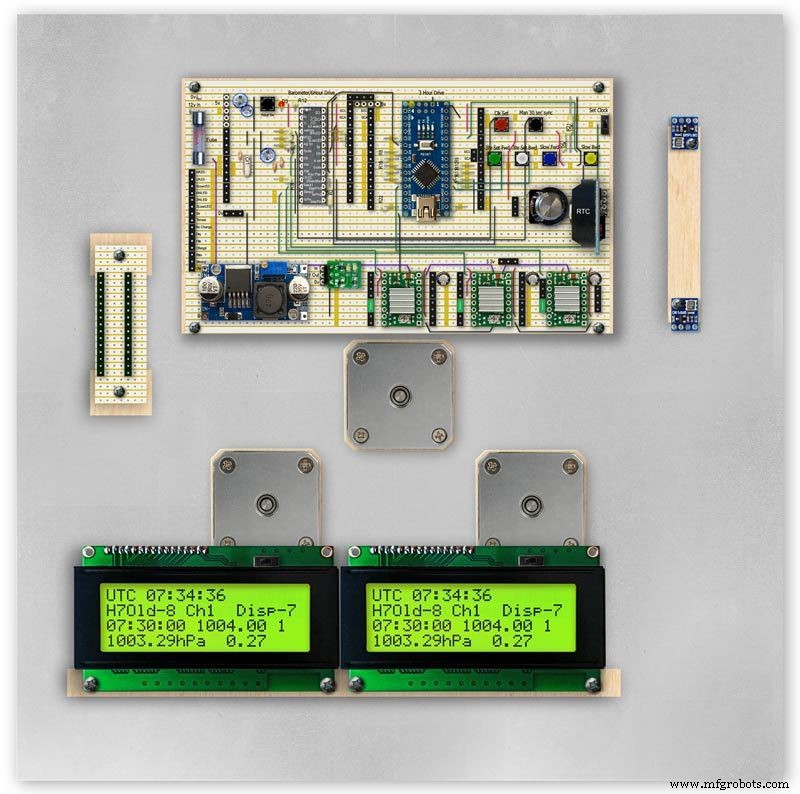
Pic.7 shows the modules and motors mounted on the blocks.
Step 16:Construction LED Fixing


The 3mm LEDs are mounted so they just show above the surface of the dial pic.1.
3mm holes are drilled and hot melt glue holds them in place.
To get a uniform depth I made a jig using a washer and piece of card glued to it pic.2.When fixing the LEDs the jig is pressed against the dial with the depth of the washer setting the protrusion of the LED through the dial.
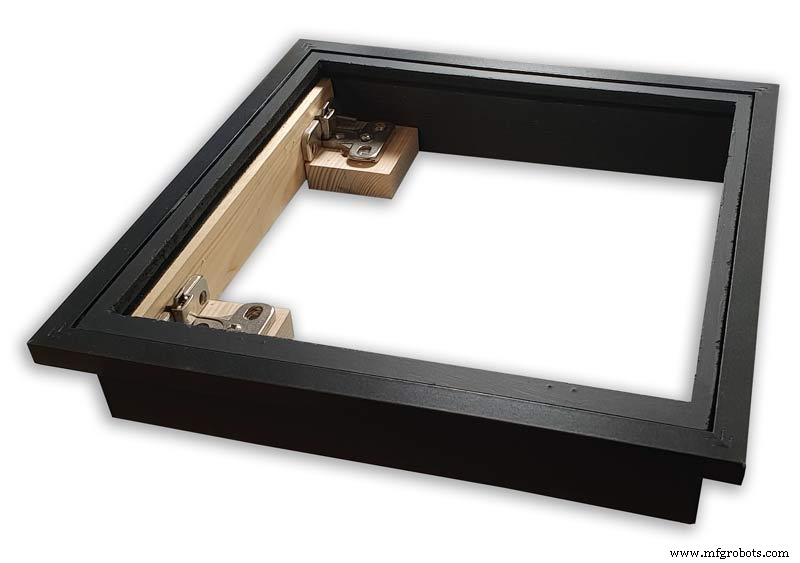
Step 17:Construction Classic Style English Dial Clock Case




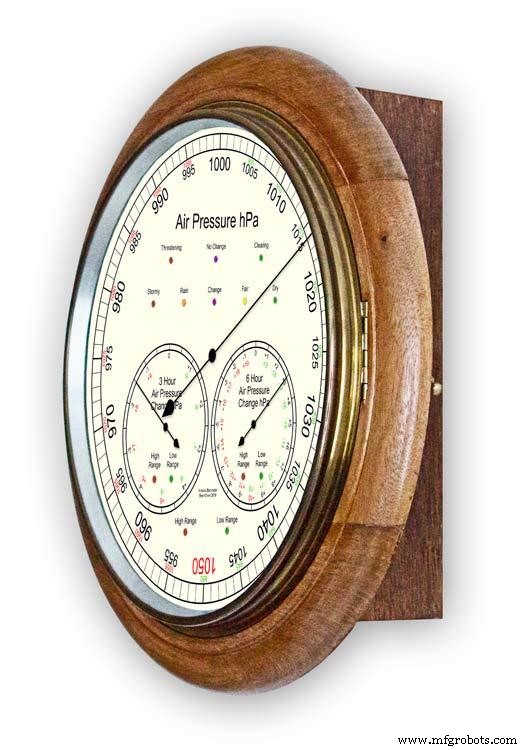

The classic 12" Dial Clock case can be purchased from Ebay as "case only" pic.1.
Various styles are available this one is oak and has a dial surround that hinges away from the back box pic.2.
This makes for a very easy build as all the hard work has been done. The dial is mounted by 3 small wood screws hidden behind the brass dial bezel.
This dial surround has been stripped and bleached to bring out the original light colour of the wood pic.3.The dial was removed as it had a winding hole off center.
A new dial was cut from a sheet of alluminium pic.4.
Pic.5 side view of the Barometer showing the back box.
Pic.6 shows my regulator clock case with original curved back box, hinged dial bezel and pegged dial surround.
Many of these clock cases were held in place by four wooden pegs. If your case is constructed like this add a pair of hinges to one side and use the remaining two pegs to lock the dial surround in place.
Step 18:Construction Modern Case

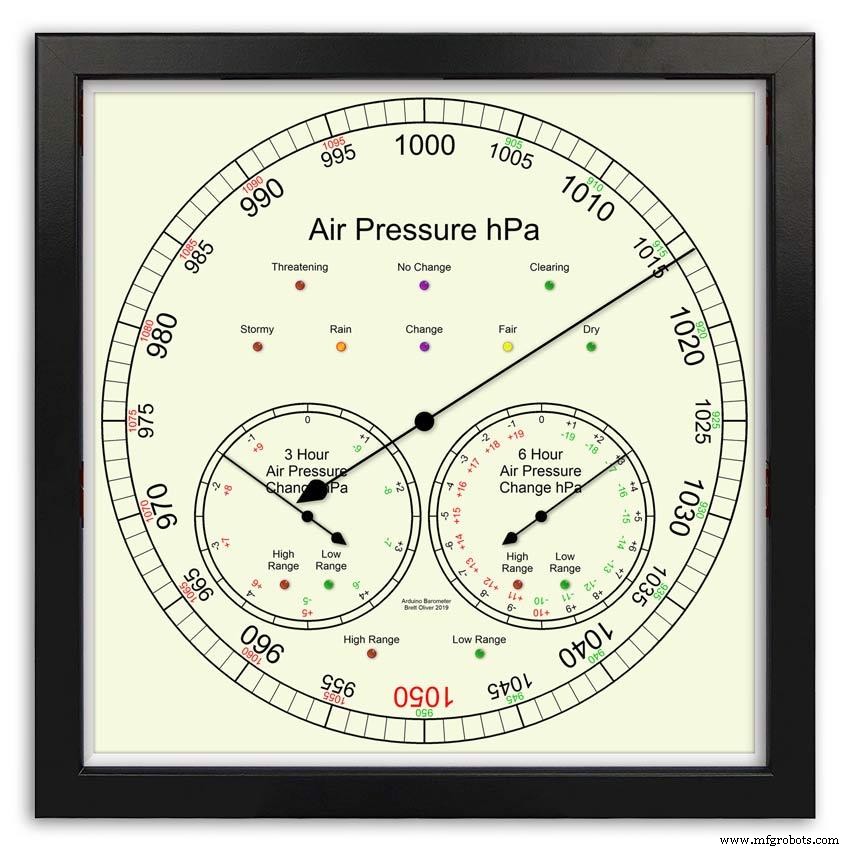


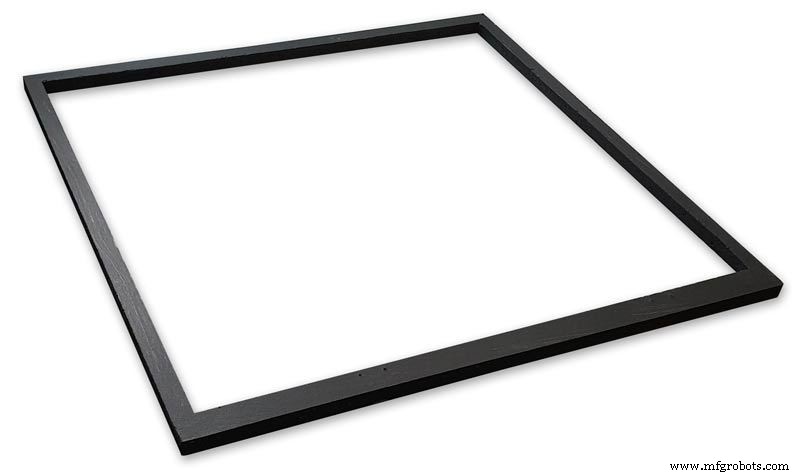
Picture Frame Version
I have used two identical picture frames mounted back to back. These frames are 30cm x 30cm approx. 12"x12" pic.1.
pic.2 Frames are joined back to back.
pic.3 This gives a double depth frame.
pic.4 Rear side view showing wired boards and modules.
pic.5 The dial viewed through the rear frame.
pic.6 Rear half of the frame with all wiring in place.
pic.7 The front of the dial now shows through the front half of the frame. Wooden bevels hide the space behind the front half of the frame.
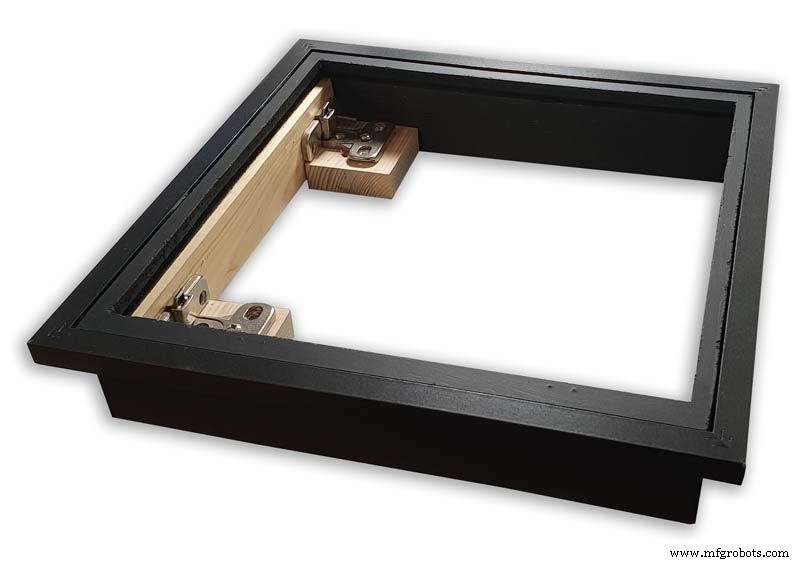
Step 19:Construction Modern Case Backbox


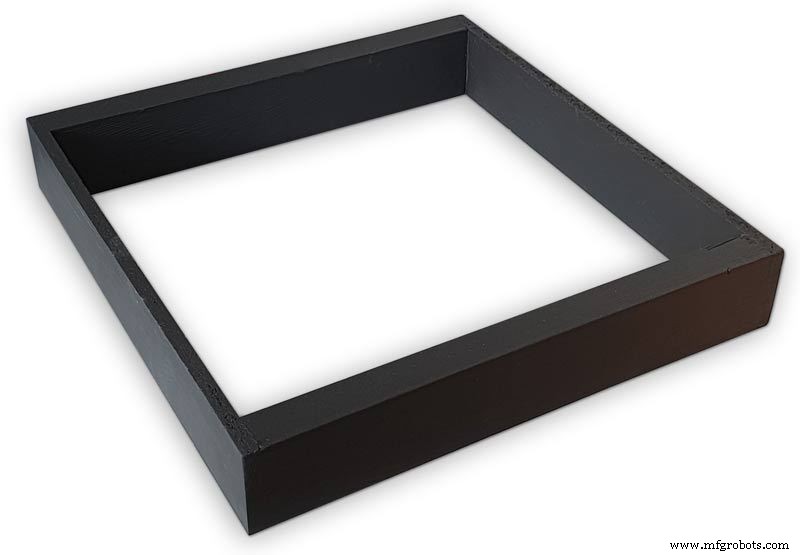

Back Box
Pic.1 The barometer is housed in a back box that is smaller than the dial frame on all side apart from the top. The fram overlap helps hide the back box and adds a shadow effect to the case on the wall.
Pic.2 The back box is 50mm deep and is simply constructed of glued and screwed wood.
Pic.3 Rear view of back box in position behind rear dial frame showing the frame overlap.
Pic.4 The screw holes are filled then a coat of matt black is applied to the back box.
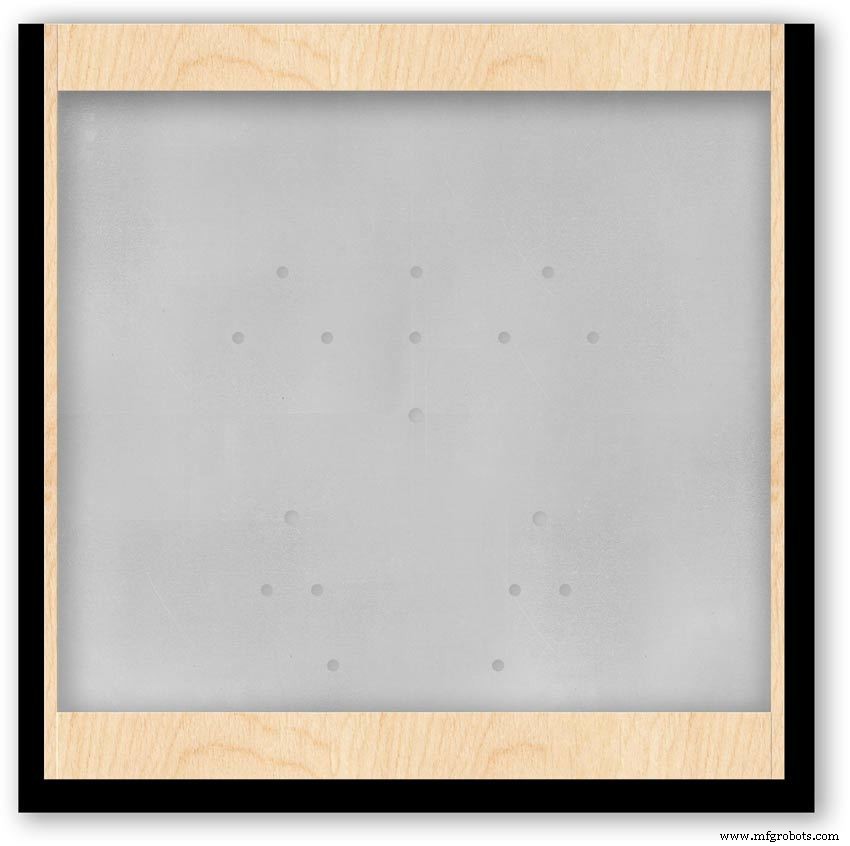
Pic.5 Back box with rear picture frame in place this holds the dial.Note the rear frame is placed upside down.
Pic.6 A spacer is cut the same size and depth as the recess of the picture frame.
Pic.7 The spacer is set under the dial.
Pic.8 This will raise the dial level with the top edge of the rear frame.
Pic.9 Back box with front picture frame in place on top of the rear frame.This frame holds the glass.
Step 20:Construction Modern Case Wall Mounting








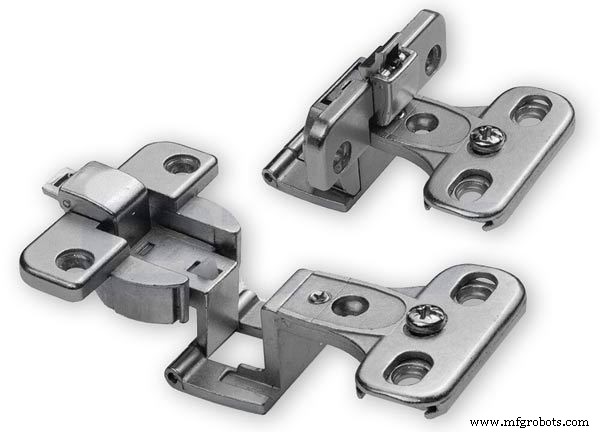
Mounting the Barometer
Pic.1 To allow access to the rear of the Barometer I have mounted it on a pair of GTV 270° inset hinges. The hinges are mounted on a block of wood fixed to the wall and allow the barometer to be swung out for access. The hinges also have a quick release function if the Barometer needs to be taken down for maintenance at any time. The hinge pivot is set back which also allows the top of the case to clear the wall when hinged out.
Pic.2 The hinges are mounted on wooden blocks screwed to the wall.
Pic.3 I have screwed and glued an extra piece of timber to the left hand side where the hinges will mount.This will add strength as all the weight of the clock will be on this side when the clock case is open. Two aluminium plates will cover the hinge holes.
Pic.4 Hinge blocks in place. Note these are bolted through the case rather than screwed.
Pic.5 Back Box mounted on the wall. The fixing screws also hold the hinge to the wooden mounting blocks The wooden baton on the right is also fixed to the wall and supports the top right hand corner of the back box. It also serves as a fixing point for the wall mount locking pins that holds the back box shut against the wall.
Pic.6 The back box is shown open with the wooden mounting blocks and batons fixed to the wall. The hole in the front edge of the baton aligns with a hole in the side of the back box. A steel pin is inserted here to lock the barometer shut against the wall.
Pic.7 Back box open allowing access to the LCD displays and setting switches.
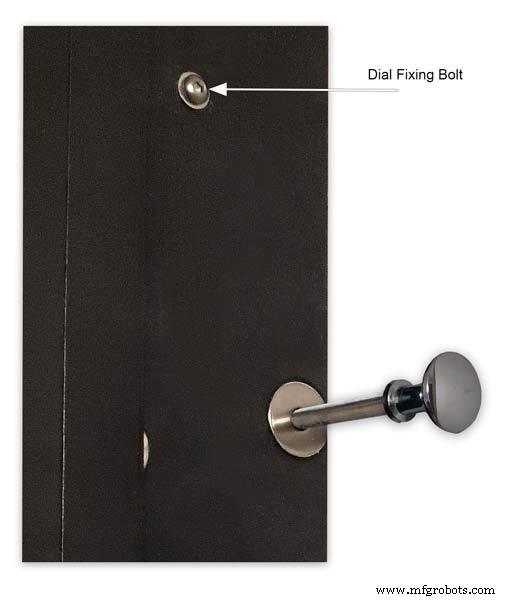
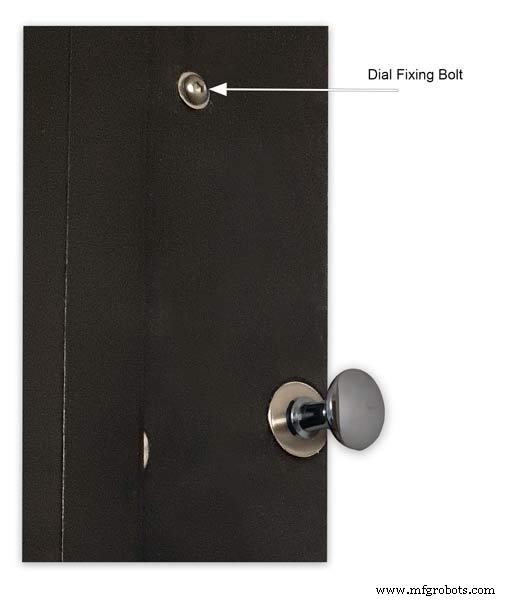
Pic.8 Steel Locking Pin This is a small cabinet knob with a length of treaded bar screwed into the thread.
Pic.9 &10 The locking pin when pushed fully in lock the barometer against the wall. When pulled out the barometer is able to swing out to allow access to the control switched and LCD displays.
Pic.11 Detail of Locking Pin and location of right side dial fixing bolt. I have glued a washer in place over the hole as an escutcheon plate.
Step 21:Construction Modern Case Dial Mounting



The dial and all the boards etc are removable for maintenance and is held to the backbox by 2 bolts.
Mounting the Dial in the Back Box
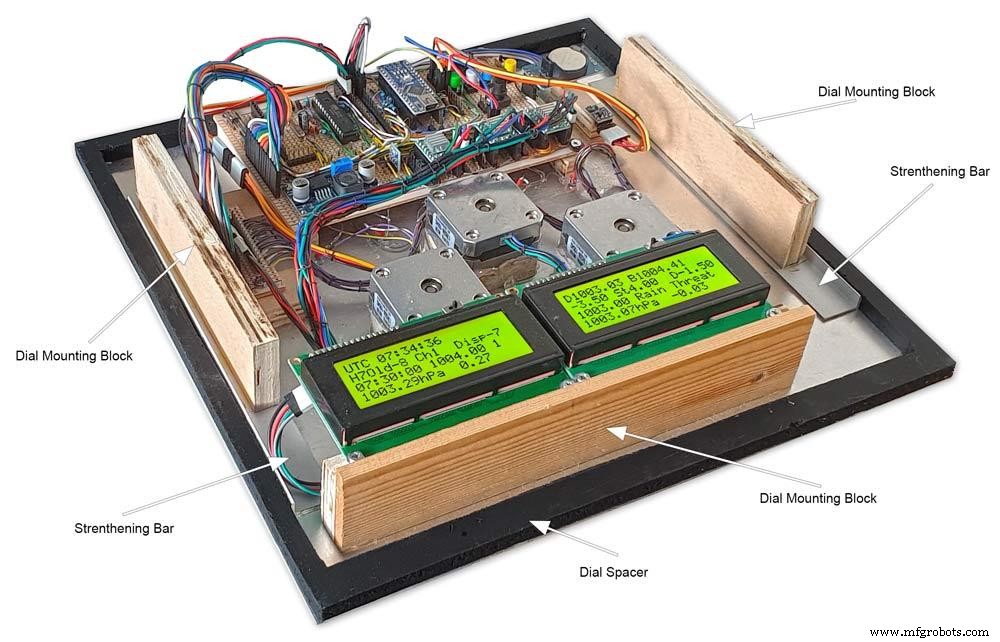
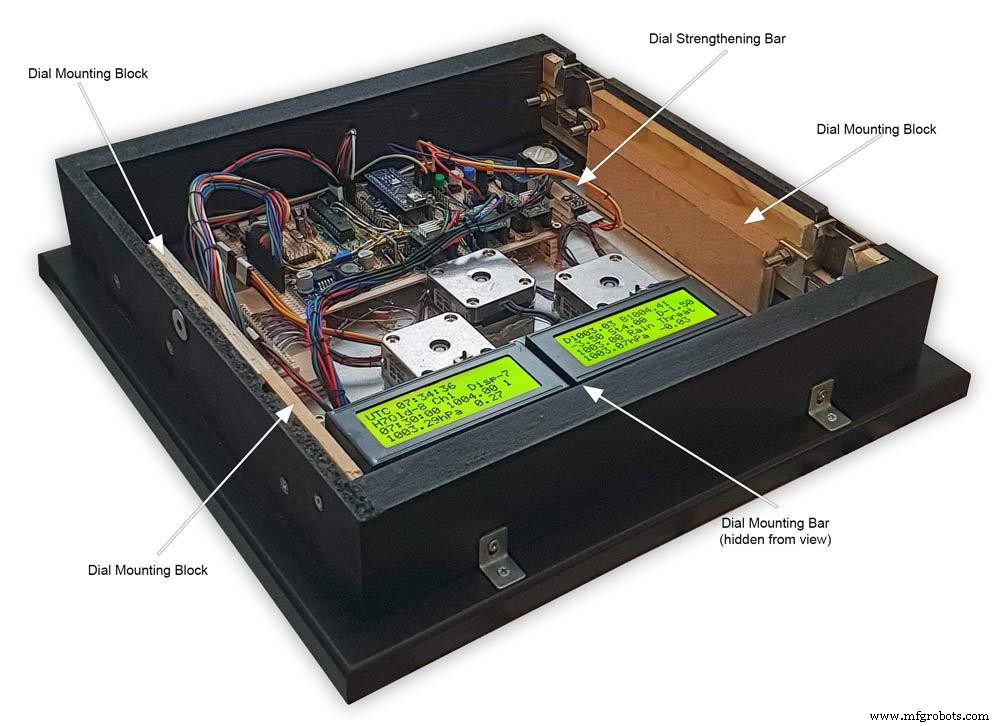
The dial holds the combined weight of all the stepper motors, boards and modules and is stiffened by impact gluing two strips of unequal aluminium angle to it's rear surface.Two blocks of wood are then glued to these bars and small screws then hold these wooden blocks through the side of the back box. A further thin strip of wood is glued to the dial below the LCD mounting block. This is not screwed to the case but sits on the back box to support the dial.
Pic.1 Strengthening bar of alluminium unequal angle.
Pic.2 Strengthening bar locations.
Pic.3 Glued wooden fixing/support blocks for dial fixing bolts left and right and glued dial support lower.
Pic.4 Shows contact/fixing points between the back box and dial. Back box in black with dial fixings/support in wood.
Pic.5 Rear view showing mounting block and bar locations.
Pic.6 Dial with Back Box Removed showing mounting blocks and strengthening bars glued to the rear of the dial.
The dial spacer allows the dial to sit flush with the top of the rear picture frame.
Pic.7 Right side of clock showing dial fixing bolt location.
Pic.8 A mount is constructed from 4 thin strips of wood and is placed in the recess of the front picture frame. This fills the gap between the picture frame and dial, holds the Perspex sheet in place and also adds a photo mount effect to the dial.
Pic.9 Mount in place behind the front picture frame.
Step 22:Contruction Dial

Pic.1 The dial is made from 1.5mm thick alluminium sheet and comes covered with a protective plastic film.
Pic.2 From your cad program print out the dial on A3 paper and include center marks for all the LED and stepper motor shaft holes.This will be your drill template.Lay the paper of the alluminium dial blank and tape the edges to stop it moving.Center punch all the holes through the paper.
Pic.3 Remove the paper template and drill out the holes 3mm for the LEDs and 3 larger holes for your stepper motor spindle.
Start with a small pilot hole and increase the drill size in 3 stages. If you are using a round dial mark it out on the projective film with a market pen and cut it out at this stage.
Pic.4 The protective plastic film can now be removed. Rub down the dial back and front to remove any burrs and to provide a key for the paint.
Pic.5 Spray a coat of acrylic primer and then your choice of top coat - I have used antique white.
I then give a final coat of matt clear acrylic. Leave to dry over night.
I have included a high res pic of the dial pic.6. Contact me if you need it in another format. My CAD format is TurboCad.
Step 23:Construction Dial Decal

Apply the water slide decal transfer.
I use Water Slide Decal paper from BIGBITE Studio They have some good tutorials on their site. https://www.bigbitestudio.co.uk/tutorials/water-decal-tutorials/
Pic.1 Water slide decals are printed out on an inkjet printer soaked in water then slid into place. They give a very detailed print and once given a coat of varnish are tough.
Don't forget to order transparent transfers so the dial colour can be seen through the transfer.Follow the instructions with the pack as they do vary.
Pic.2 On my transfers I print out the dial on transfer paper let it dry and then cut it out to just under the size of the dial. I then give it a coat of acrylic varnish.
I set my printer as follows:Plain Paper, Photo &High Speed Off This stops my printer from over inking the paper When the varnish is dry the transfer is soaked in water until the transparent transfer comes away from the white backing sheet.
Pic.3 Move the soaked transfer over the dial.
Pic.4 Slide the transfer into position.
Pic.5 Gently pull the white backing paper backward while holding the transfer down.
Make sure the crosses line up with the center of all the holes.
Pic.6 Get rid of any air bubbles.
Pic.7 Then leave it to dry before adding a coat of matt varnish.
After the coat of varnish break through the layer of transfer over the holes using the back of a drill bit jus smaller than the holes. Then give a final coat of varnish to seal the edges around the holes.
Step 24:Construction Hands



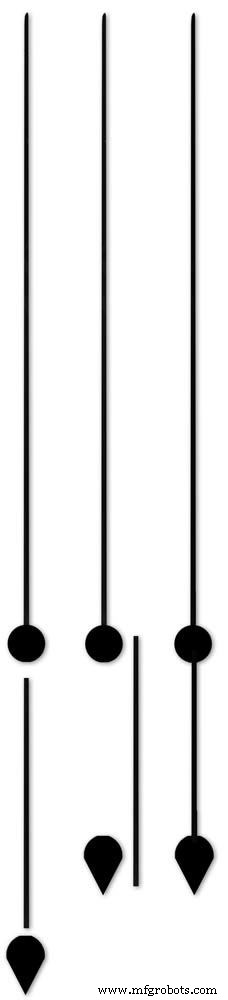






Hands are a very personnal choice and there are many diffent styles to choose from. The hardest part is finding hands that match each other. I found a perfect set of small hands but was unable to find a matching longhand for the main barometer. In the end I made my own from 3 donor hands.
All my hands were quartz second hands so I hand to file the mounting spindle off the back for mounting on the stepper motor spindle.
On some stepper motors the spindle can be drilled out to take the hand spindle but my spindles were too hard to drill.
Pic.1 my completed hands.
Pic.2 The long barometer hand was constructed from 3 different hands
Pic.3 To get the lower spade balance part of the hand I used a spade hand.
Pic.4 First I cut off the top using sharp scissors.
Pic.5 The top was then trimmed by cutting the point off.
Pic.6 The remaining part was then filed away to match the shape of the 2 smaller hands.
Pic.7 The completed balance for the hand.
Pic.8 To make the front pointer and center I cut the end off one off my donor hands.
Pic.9 To make the rear balance shaft I cut a section out of the 3rd donor hand.
Pic.10 Left the 3 parts of the new hand. Middle shows the overlap of the balance shaft to allow for bonding. Right pic shows the balance shaft bonded with impact adhesive to the underside of the balance and center shaft.
To fix the hands to the stepper motor spindle I did not want to use impact adhesive as the hands are fragile and would be damaged if I hand to remove them. In the end I went for a tiny bit of Blu Tack on each hand. Blu Tack is putty like and is non setting but seems to hold very well!
Step 25:Construction Schematic
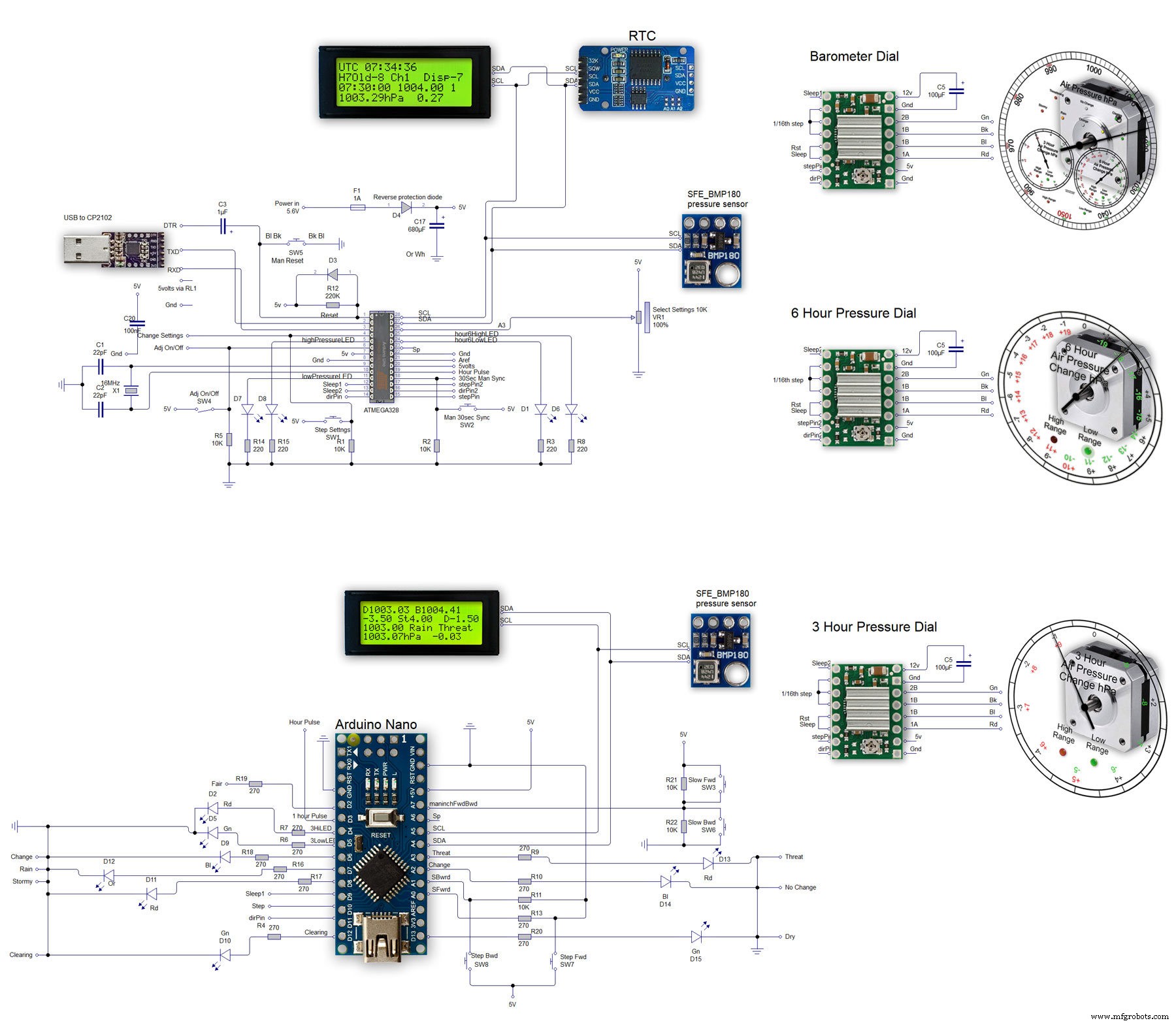
The main shematic is shown in Pic. 1 with the power supply in Pic.2.
You will also need a regulated plug in 12v supply adaptor of around 1amp.
Note I have fitted switches on the LCD displays to turn the backlight LEDs On and Off. This is optional but as the displays are not visible for 99.99% of the time it will save power.
Note larger schematics can be found on my web site here
Step 26:Construction Vero Board
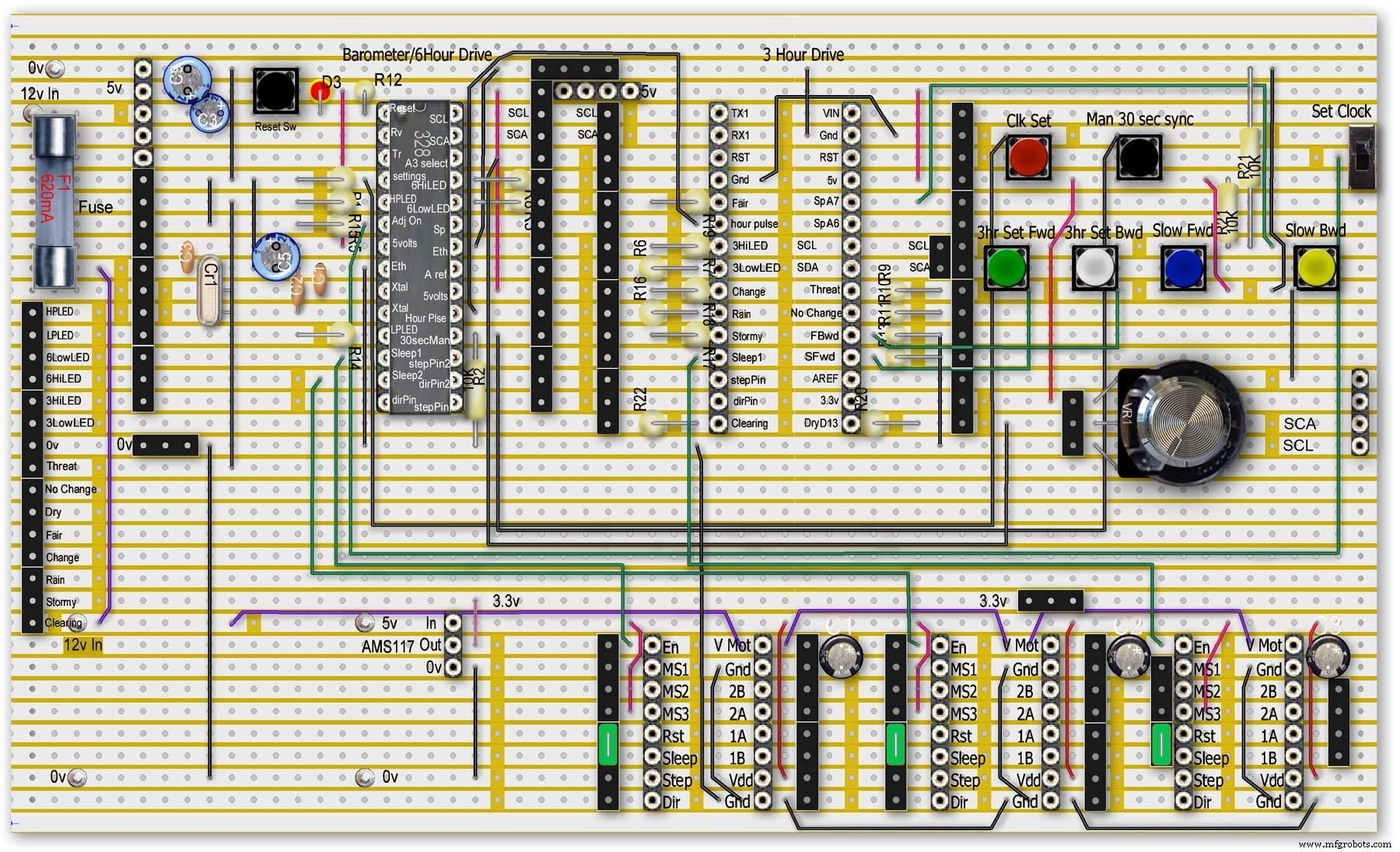
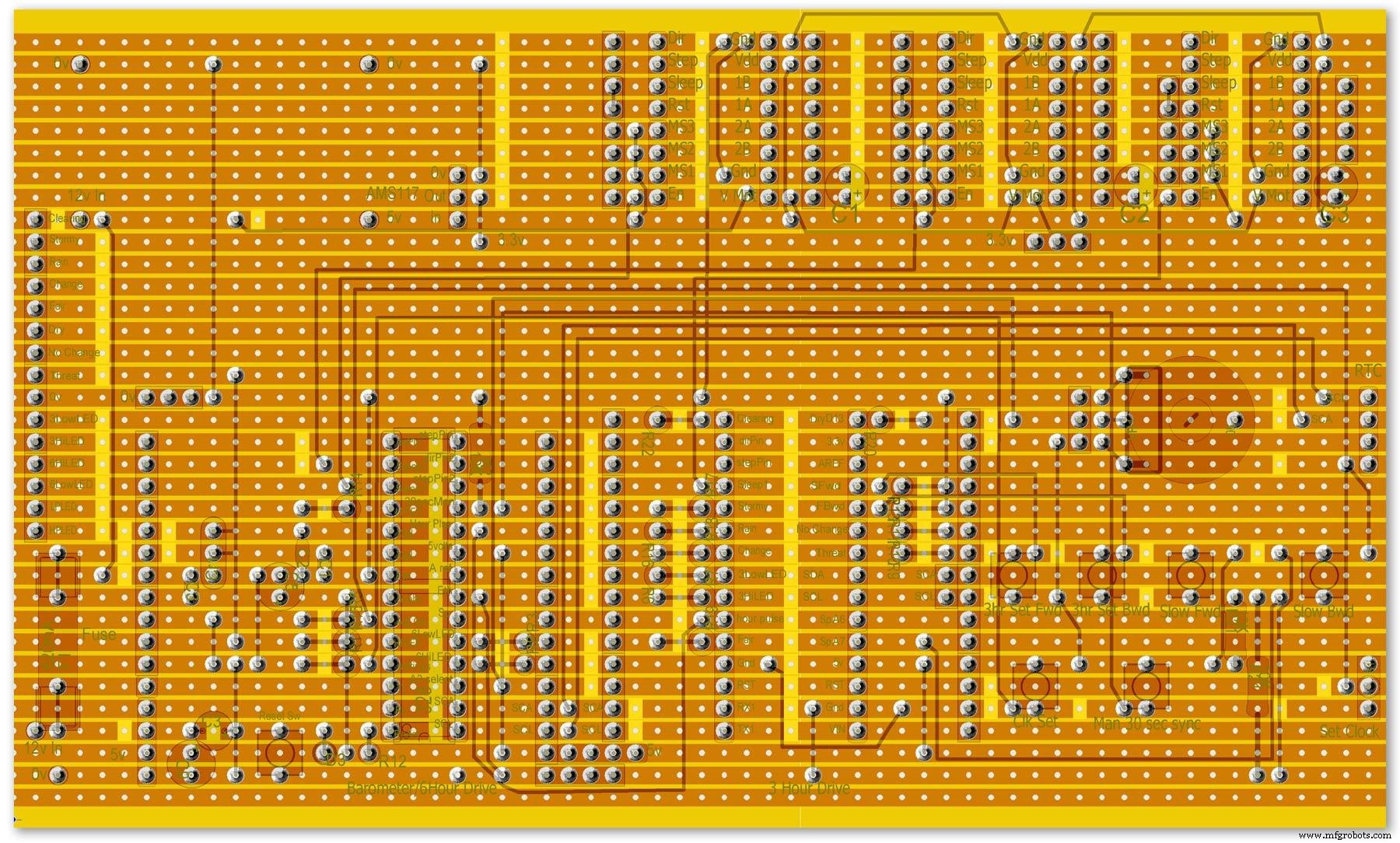

Vero Board Layouts
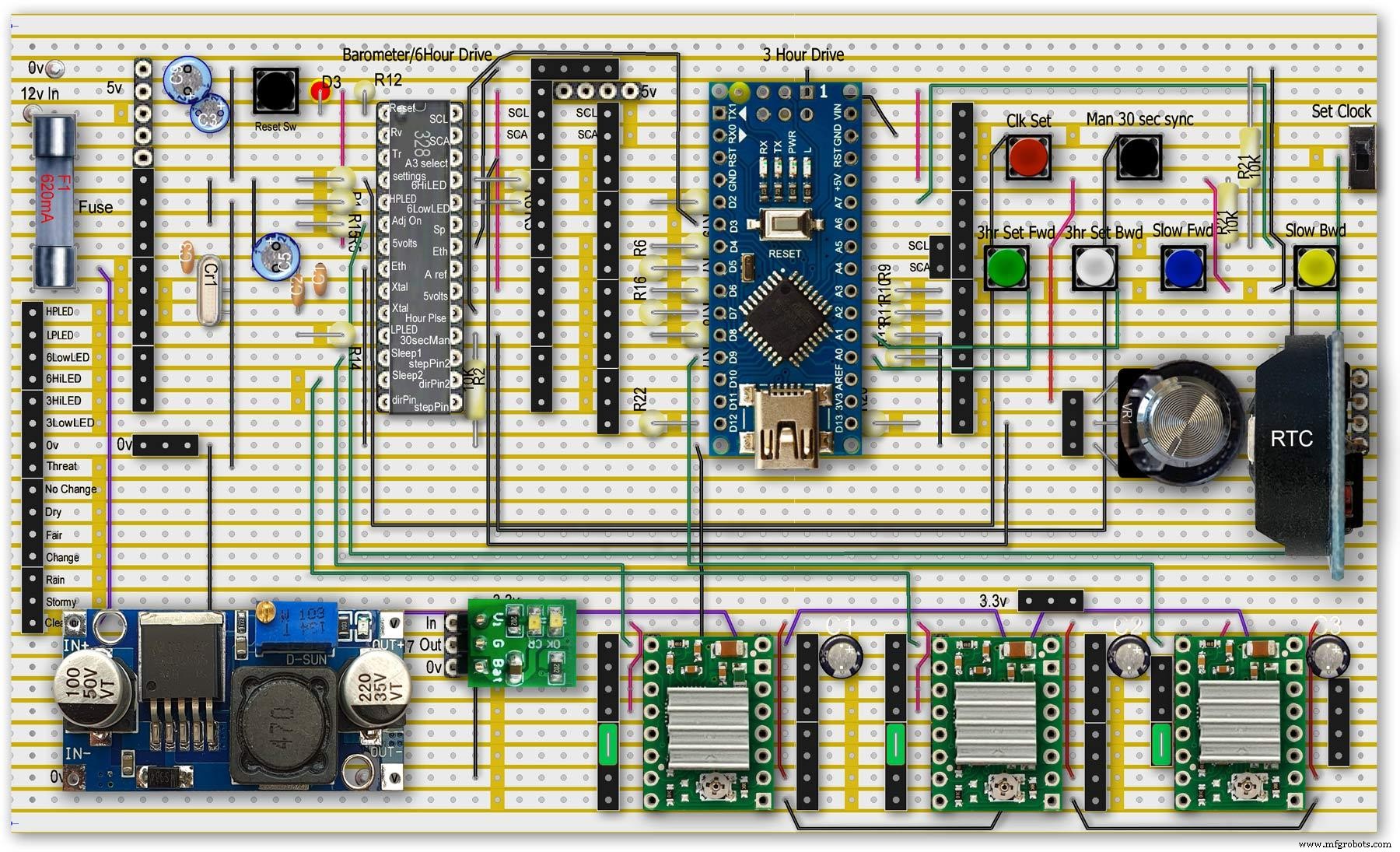
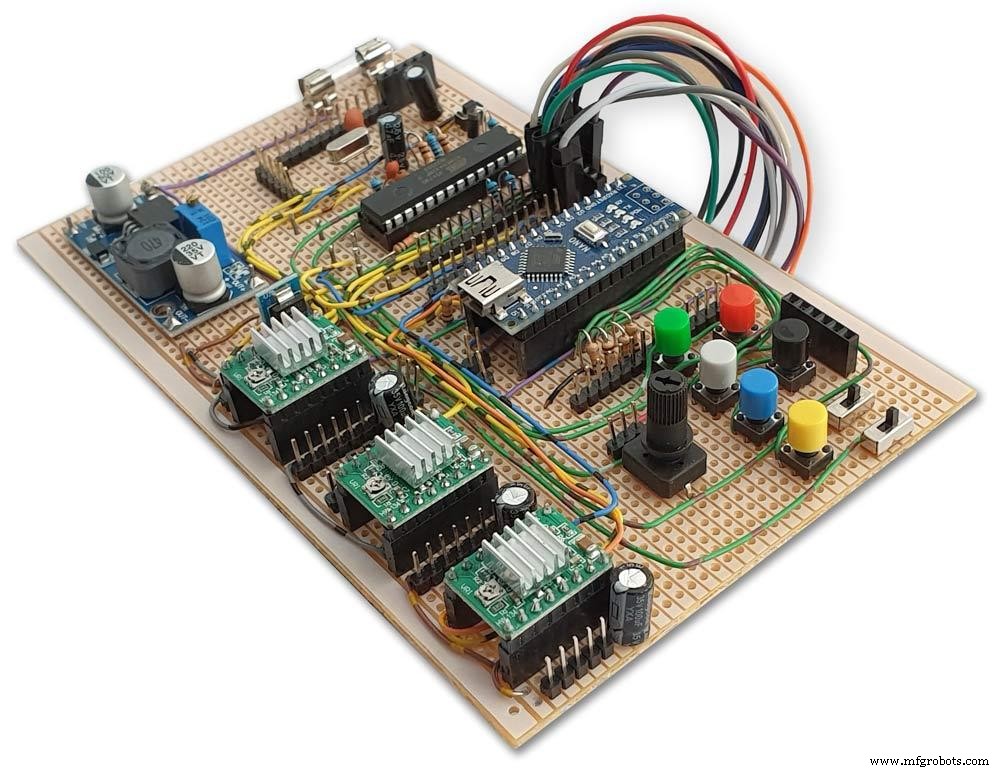
Pic.1 Vero Board with all modules removed.
Pic.2 Vero Board with modules in place.
Pic.3 Vero Board rear view (flipped down from top).
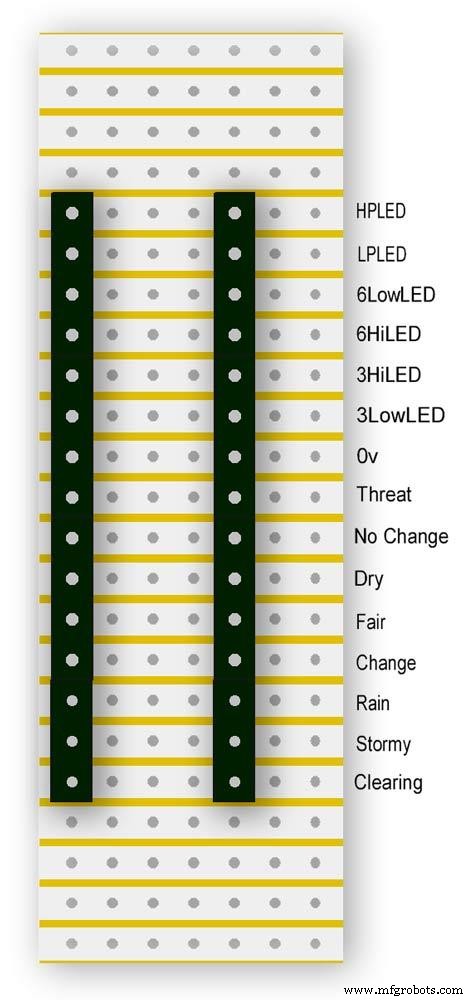
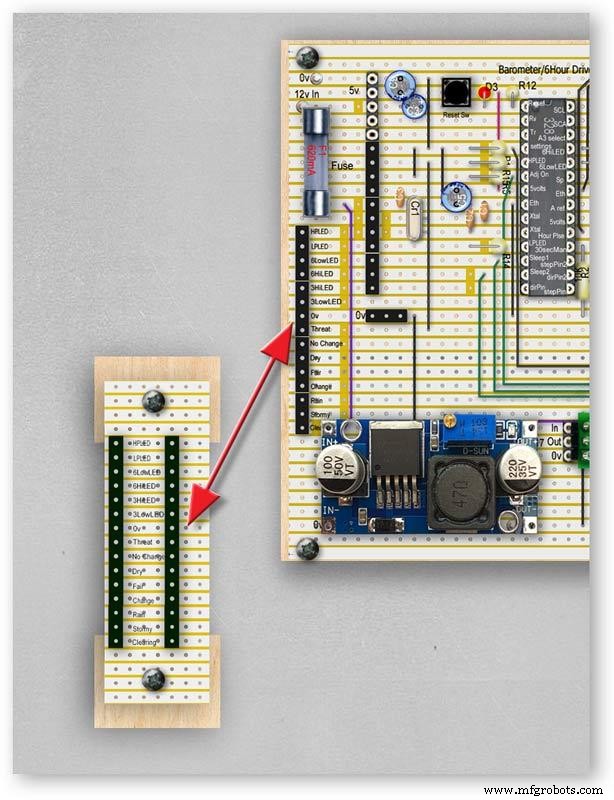
Pic.4 LED Vero Board
This board is used as a connection point for the dial LEDs. This allows the dial to be disconnected from the main board if required for maintenance.
Pic.5 The LED Vero Board connects to the main board with Dupont sockets and male Dupont cable
Pic.6 Vero Board wiring in progress.
Pic.7 Vero Boards and module location on the rear of the dial.
Step 27:Code
Code
There are 2 parts to the code 1 for the Main Barometer Code and 6 hour display and 1 for the 3 hour display and weather forecast.
Step 28:Time-Lapse Video
Time-Lapse Video showing rain radar and the Barometer predicting rain and a storm.
This is a 4K video so you should be able to see full details of the dial and forecast LEDs.
Code
- BarometerA4988_23.ino
- BarometerA4988_3hour__21.ino
BarometerA4988_23.inoArduino
Main file for Barometer and 6 hour display/* Example sketch to control a 28BYJ-48 stepper motor with ULN2003 driver board, AccelStepper and Arduino UNO:number of steps/revolutions. More info:https://www.makerguides.com v4 moved step 6 hour pressure step from void getpressure 1523 to main loop check every hour 365v5 remove unwamted step elementsv6 convert to diff display on 6 hr motorv8 modified hour change formula 1486v9 sleepv10 chnged high/low for EN control v11 chenge calc for hour change 1380v12 added calcCurrentDisp (); to calc current time from line 1384v13 removed 30 sec syncv14 air pressure extremes LEDsv15 add hour diff hour calc etc to row 1 when not on settingsv16 adding 16th stepsv17 errorv18 change min pulse to hour pulse on the hour + 1minv19 check enable and sleepsv20 added DAC to NANO so pins changed on 328 to match (analogue and digital swapped A6 D3 - deleted v20 also changed Low range hi range to both light above 19 or -19v21 same as 20 with serial print removedv23 notes added LCD display info added to startup */#include//SFE_BMP180 pressure sensor#include #include #include // ######## You will need to create an SFE_BMP180 object, here called "pressure":SFE_BMP180 pressure;#define ALTITUDE 118.0 // Altitude of Kenley Surrey in meters// also used to adjust/sync/calibrate to nearby weather station/3 hour display//#########//**********************// set the LCD address to 0x27 for a 20 chars 4 line display// Set the pins on the I2C chip us ed for LCD connections:// addr, en,rw,rs,d4,d5,d6,d7,bl,blpolLiquidCrystal_I2C lcd(0x27, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE); // Set the LCD I2C address#define DS3231_I2C_ADDRESS 0x68// Convert normal decimal numbers to binary coded decimalbyte decToBcd(byte val){ return( (val/10*16) + (val%10) );}// Convert binary coded decimal to normal decimal numbersbyte bcdToDec(byte val){ return( (val/16*10) + (val%16) );}// Include the AccelStepper library:#include // Define stepper motor connections and motor interface type. Motor interface type must be set to 1 when using a driver:#define dirPin 8#define stepPin 9#define dirPin2 10#define stepPin2 11#define motorInterfaceType 1// Create a new instance of the AccelStepper class:AccelStepper stepper =AccelStepper(motorInterfaceType, stepPin, dirPin);//barometer motorAccelStepper stepper2 =AccelStepper(motorInterfaceType, stepPin2, dirPin2);// 6 hour motorfloat seaPressure =0;float pressureNow =0;float pressurePrevious =0;float pressureDiff =0;int checkStop =0;int pressureRndDiff =0;int pressureRndNow =0;int pressureRndPrevious =0;int adjustOn =4; // allows adjustment of barometer// int test =0; // test mode 0 off 1 is onchar status; double T,P,a;//int h =0;//int m =0;//int j =0;int stepcount =0;int time =0;int resetmins =1;int secondNow =0;int secondPrevious=0;int minuteNow =0;int minutePrevious=0;int hourNow =0;int hourPrevious=0;int hourNow1=0;int hourPrevious1=0;int initial =0;int initial1 =0;int initial3 =0;int highPressureLED =3;int lowPressureLED =5;int hour6LowLED =15;int hour6HighLED =16;int manSync =12; // resets seconds to 30 secondsint changeSetting =2;int syncStop =0;int sync30Stop =0;int stepoffHour =0;int stepoffHourbkw =0;int stepoffMin =0;int stepoffMinbwd =0;int stepoffRTCminfwd =0;int stepoffRTCminbwd =0;int stepoffRTChourfwd =0;int stepoffRTChourbwd =0;int settingreadPin =A3; //Pin for sensing analogue value from potint settingVal =0; // Analogue value 0-1023int LCDstop =0; // stops settings on LCD display refreshing until they changeint hourPulse =13; //min pulse for seconds display was 14int adjustLock =0; // turns off adjust lockint hourcalc =0; // number from 0 to 7 representing the 8 hours of stored pressure readings int hourDiff =0; // used to check if 6hour previous motor should be stepped.int hourChange =0; // the amount of 6 hour to stepint currentDisplay =0; //current 6hour change readingint hour0 =1013; // you can set last 8 hours pressure here or leave at 0 and theint hour1 =1014; // readings will catch up over the next 8 hoursint hour2 =1015;int hour3 =1016;int hour4 =1016;int hour5 =1016;int hour6 =1012;int hour7 =1013;int sleep1 =6;int sleep2 =7;// check air pressure here https://www.meteoplug.com/cgi-bin/meteochart.cgi?draw=a3aeaaa1acbdf9f1fcfed4fedbc2c094c0d6d6d1d2c5edcebbfee9ffeff1fbf9//int Disp3hrIn =A3;//int Disp3hrVal =0;void setup() { pinMode(adjustOn, INPUT); pinMode(hourPulse, OUTPUT); pinMode(highPressureLED, OUTPUT); pinMode(lowPressureLED, OUTPUT); pinMode(hour6LowLED, OUTPUT); pinMode(hour6HighLED, OUTPUT); pinMode(manSync, INPUT); pinMode(sleep1, OUTPUT); pinMode(sleep2, OUTPUT); pinMode(settingreadPin, INPUT); // Set the maximum steps per second:stepper.setMaxSpeed(1000); stepper2.setMaxSpeed(1000); lcd.begin(20,4); // initialize the lcd for 20 chars 4 lines, turn on backlight lcd.backlight(); // backlight on not needed as man controlled lcd.setCursor(0,0); //Start at character 0 on line 0 lcd.print("Barometer A988"); //@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ lcd.setCursor(0,1); //Start at character 0 on line 1 lcd.print(" Version 23"); //@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ { Wire.begin(); Serieel.begin(9600); // set the initial time here:// DS3231 seconds, minutes, hours, day, date, month, year // setDS3231time(10,42,9,5,18,12,19);//delay(2000);lcd.clear();}Serial.println("REBOOT");// serial removed // Initialize the sensor (it is important to get calibration values stored on the device). if (pressure.begin()) Serial.println("BMP180 init success");// serial removed else { // Oops, something went wrong, this is usually a connection problem, // see the comments at the top of this sketch for the proper connections. Serial.println("BMP180 init fail\n\n");// serial removed while(1); // Pause forever. } //LED TestdigitalWrite(hour6HighLED, HIGH);delay (500);digitalWrite(hour6HighLED, LOW);digitalWrite(hour6LowLED, HIGH);delay (500);digitalWrite(hour6LowLED, LOW);digitalWrite(highPressureLED, HIGH);delay (500);digitalWrite(highPressureLED, LOW);digitalWrite(lowPressureLED, HIGH);delay (500);digitalWrite(lowPressureLED, LOW);delay (500);lcd.clear();getPressure ();// gets all pressure readings// Disp readings on startup so hands can be set lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print("H"); lcd.print(hourcalc); lcd.setCursor(2,1); lcd.print(" "); lcd.setCursor(2,1); lcd.print("Old"); lcd.print(currentDisplay); lcd.setCursor(13,1); lcd.print(" "); lcd.setCursor(13,1); lcd.print("Disp"); lcd.print(hourDiff); //disable motors on startupdigitalWrite(sleep1, HIGH);digitalWrite(sleep2, HIGH);stepper.disableOutputs();stepper2.disableOutputs();// test =1; // test set to 0 off 1 on}void loop() { if( digitalRead(adjustOn) ==HIGH || adjustLock ==1)// only alow settings when change settings switch is ON{ //digitalWrite(sleep1, LOW);//enable on //digitalWrite(sleep2, LOW);//enable on only enable outputs for 2 mins Settings(); //set what function the setiing switches have adjustLock =1; //hold on adjustment if( digitalRead(adjustOn) ==LOW){//digitalWrite(sleep1, HIGH);//disable on//digitalWrite(sleep2, HIGH);//enable on only enable outputs for 2 minsadjustLock =0; //hold on adjustment } }// only allow settings change when setting switch is on // displayTime(); // display the real-time clock data on the Serial Monitor, byte second, minute, hour, dayOfWeek, dayOfMonth, month, year; // retrieve data from DS3231 readDS3231time(&second, &minute, &hour, &dayOfWeek, &dayOfMonth, &month, &year);//@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ //enable air pressure readings if (minute ==9 || minute ==19 || minute ==29 || minute ==39 || minute ==49 || minute ==59 &&second ==59) { checkStop =0;// resets checkstop to allow air pressure readings every 10 mins }//check air pressure every 10 mins if (checkStop ==0) { if ( minute ==0 || minute ==10 || minute ==20 || minute ==30 || minute ==40 || minute ==50 ) { //digitalWrite(sleep1, LOW);//enable on -only enable outputs for 1 min // only sleep1 needs activation getPressure ();// gets all pressure readings checkStop =1;// stops multiple readings of air pressure }// else //digitalWrite(sleep1, HIGH);//enable off // Serial.print("Sleep 1 HIGH (off) "); // Serial.println(hourChange); } //@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@if(digitalRead(manSync)==HIGH)// resets seconds to 30{ setDS3231time(30, minute, hour, dayOfWeek, dayOfMonth, month, year); //Set seconds to 30 on RTC } // counts seconds secondNow =second; if(secondNow!=secondPrevious || initial) { lcd.setCursor(0,0); lcd.print("UTC "); if(hour<10) { lcd.print(0); } lcd.print(hour); lcd.print(":"); if(minute<10) { lcd.print(0); } lcd.print(minute); lcd.print(":"); if(second<10) { lcd.print(0); } lcd.print(second); lcd.print(" "); // Serial.print("-1*0 ");// Serial.println(-1*0); initial =0; secondPrevious =secondNow; } // count minutes minuteNow =minute; if(minuteNow!=minutePrevious || initial) //settingVal <690 stops clock motors operating when setting RTC { initial =0; minutePrevious =minuteNow; // digitalWrite(minPulse,HIGH);//1 min pulse for seconds display sync syncStop =0;// clock will not sync again untill a new minute has started. // digitalWrite(minPulse,LOW);//1 min pulse for seconds display sync } // counts hours + 1min for hourPulse at 15 seconds past the hour this allows barometer and 6 hour dial to step first if ( minute ==0 &&second ==15) // send hour pulse 15 seconds past the hour to 3 hour circuit allows other motors to stop { digitalWrite(hourPulse,HIGH); digitalWrite(highPressureLED,HIGH); // Serial.println("hourPulse Hi "); } else if (minute !=1 || second !=0) { digitalWrite(hourPulse,LOW);digitalWrite(highPressureLED,LOW); }// counts hours hourNow =hour; if ((minute ==59 &&second> 50) || (minute ==0 &&second <10) )// allows change on the hour only {// digitalWrite(sleep2, LOW);// enable 6hr motor if(hourNow!=hourPrevious || initial) //settingVal <690 stops clock motors operating when setting RTC { initial =0; hourPrevious =hourNow;//print hour stores every hour // serial removed /* Serial.print("hour0 "); Serial.println(hour0); Serial.print("hour1 "); Serial.println(hour1); Serial.print("hour2 "); Serial.println(hour2); Serial.print("hour3 "); Serial.println(hour3); Serial.print("hour4 "); Serial.println(hour4); Serial.print("hour5 "); Serial.println(hour5); Serial.print("hour6 "); Serial.println(hour6); Serial.print("hour7 "); Serial.println(hour7); */ //##############################################################################//step 6 hour motorif (hourChange> 0 &&hourChange <40) // 6 hour motor will not step if diff> 10 { stephourFwd(); //Serial.print("Step 6 hour Forward ");// serial removed // Serial.println(hourChange);// serial removed hourChange =0; } else if (hourChange <0 &&hourChange> -40) // else if (hourDiff ==-1 || test ==1) { stephourBwd(); // Serial.print("Step 6 Hour Backward ");// serial removed // Serial.println(hourChange);// serial removed hourChange =0; } // hourChange =0; //############################################################################## } // digitalWrite(sleep2, HIGH);// disable 6hr motor// add LCD stop if(second==0) { // lcd.setCursor(0,1); //lcd.print(" "); lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print("H"); lcd.print(hourcalc); lcd.setCursor(2,1); lcd.print(" "); lcd.setCursor(2,1); lcd.print("Old"); lcd.print(currentDisplay); lcd.setCursor(13,1); lcd.print(" "); lcd.setCursor(13,1); lcd.print("Disp"); lcd.print(hourDiff); } } } // Set Clock/Motors###################################################################################################//gets advance retard settings from potvoid Settings(){ settingVal =analogRead(settingreadPin); // read the value from the pot if ( settingVal>=0 &&settingVal <85 ) { setMinsfwd(); } if ( settingVal>=85 &&settingVal <170 ) { setMinsbwd(); } if ( settingVal>=170 &&settingVal <255 ) { setMinsslowfwd(); } if ( settingVal>=255 &&settingVal <340 ) { setMinsslowbkd(); } if ( settingVal>=340 &&settingVal <425 ) { setHoursfwd(); } if ( settingVal>=425 &&settingVal <510 ) { setHoursbwd(); } if ( settingVal>=510 &&settingVal <595 ) { setHoursslowfwd(); } if ( settingVal>=595 &&settingVal <690 ) { setHourslowbkd(); } if ( settingVal>=690 &&settingVal <765 ) { setRTCfwdmin(); } if ( settingVal>=765 &&settingVal <850 ) { setRTCbwdmin(); } if ( settingVal>=850 &&settingVal <900 ) { setRTCfwd(); } if ( settingVal>=900 &&settingVal <970 ) { setRTCbwd(); }if ( settingVal>=970 &&settingVal <1025 ) { } if ( settingVal>=0 &&settingVal <85 &&LCDstop==0)// LCDstop prevents the LCD from freshing until another item is selected { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print("Barometer Advance"); LCDstop=1; } if ( settingVal>=85 &&settingVal <170 &&LCDstop==1) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print("Barometer Retard"); LCDstop=0; } if ( settingVal>=170 &&settingVal <255 &&LCDstop==0 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print("Baro Inch Advance"); LCDstop=1; } if ( settingVal>=255 &&settingVal <340 &&LCDstop==1 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print("Baro Inch Retard"); LCDstop=0; } if ( settingVal>=340 &&settingVal <425 &&LCDstop==0 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print("6Hr Baro Advance"); LCDstop=1; } if ( settingVal>=425 &&settingVal <510 &&LCDstop==1 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print("6Hr Baro Retard"); LCDstop=0; } if ( settingVal>=510 &&settingVal <595 &&LCDstop==0 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print("6Hr Baro Inch Advn"); LCDstop=1; } if ( settingVal>=595 &&settingVal <690 &&LCDstop==1 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print("6Hr Baro Inch Retard"); LCDstop=0; } if ( settingVal>=690 &&settingVal <765 &&LCDstop==0) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print("RTC Min Advance"); LCDstop=1; } if ( settingVal>=765 &&settingVal <850 &&LCDstop==1 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print("RTC Min Retard"); LCDstop=0; } if ( settingVal>=850 &&settingVal <900 &&LCDstop==0 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print("RTC Hour Advance"); LCDstop=1; } if ( settingVal>=900 &&settingVal <970 &&LCDstop==1 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print("RTC Hour Retard"); LCDstop=0; } if ( settingVal>=970 &&settingVal <1025 &&LCDstop==0 ) { lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print("OFF"); LCDstop=1; } }// END of Loop// set RTC min forward 1 min per press ##################################################################################void setRTCfwdmin(){ if( digitalRead(changeSetting) ==HIGH &&stepoffRTCminfwd ==0 ) { byte second, minute, hour, dayOfWeek, dayOfMonth, month, year; // retrieve data from DS3231 readDS3231time(&second, &minute, &hour, &dayOfWeek, &dayOfMonth, &month, &year); minute =minute+1; if (minute ==60) { minute =0; } setDS3231time(second, minute, hour, dayOfWeek, dayOfMonth, month, year); //Set seconds to 30 on RTC stepoffRTCminfwd =1; } if( digitalRead(changeSetting) ==LOW ) { stepoffRTCminfwd =0; }}//##################################################################################// set RTC min backward 1 min per press ##################################################################################void setRTCbwdmin(){ if( digitalRead(changeSetting) ==HIGH &&stepoffRTCminbwd ==0 ) { byte second, minute, hour, dayOfWeek, dayOfMonth, month, year; // retrieve data from DS3231 readDS3231time(&second, &minute, &hour, &dayOfWeek, &dayOfMonth, &month, &year); minute =minute-1; if (minute <1) { minute =59; } setDS3231time(second, minute, hour, dayOfWeek, dayOfMonth, month, year); //Set seconds to 30 on RTC stepoffRTCminbwd =1; } if( digitalRead(changeSetting) ==LOW ) { stepoffRTCminbwd =0; }}//##################################################################################//###################################################################################################// set RTC hour forward 1 hour per press ##################################################################################void setRTCfwd(){ if( digitalRead(changeSetting) ==HIGH &&stepoffRTChourfwd ==0 ) { byte second, minute, hour, dayOfWeek, dayOfMonth, month, year; // retrieve data from DS3231 readDS3231time(&second, &minute, &hour, &dayOfWeek, &dayOfMonth, &month, &year); hour =hour+1; setDS3231time(second, minute, hour, dayOfWeek, dayOfMonth, month, year); //Set seconds to 30 on RTC stepoffRTChourfwd =1; } if( digitalRead(changeSetting) ==LOW ) { stepoffRTChourfwd =0; }}//##################################################################################// set RTC hour backward 1 hour per press ##################################################################################void setRTCbwd(){ if( digitalRead(changeSetting) ==HIGH &&stepoffRTChourbwd ==0 ) { byte second, minute, hour, dayOfWeek, dayOfMonth, month, year; // retrieve data from DS3231 readDS3231time(&second, &minute, &hour, &dayOfWeek, &dayOfMonth, &month, &year); hour =hour-1; setDS3231time(second, minute, hour, dayOfWeek, dayOfMonth, month, year); //Set seconds to 30 on RTC stepoffRTChourbwd =1; } if( digitalRead(changeSetting) ==LOW ) { stepoffRTChourbwd =0; }}//##################################################################################// set Minutes Motor forward 1 min per press ##################################################################################void setMinsfwd(){ //digitalWrite(sleep1, LOW); //stepper.enableOutputs();// step minutes 1 min per press if( digitalRead(changeSetting) ==HIGH &&stepoffMin ==0 ) { //Serial.println("Step Forward Man");// serial removed stepoffMin =1; stepminsFwd(); } if( digitalRead(changeSetting) ==LOW ) { stepoffMin =0; }//digitalWrite(sleep1, HIGH); //stepper.disableOutputs();}//##################################################################################// set Minutes Motor backward 1 min per press ##################################################################################void setMinsbwd(){ //digitalWrite(sleep1, LOW); // stepper.enableOutputs(); if( digitalRead(changeSetting) ==HIGH &&stepoffMinbwd ==0 ) { // Serial.println("Step Backward Man");// serial removed stepoffMinbwd =1; stepminsBwd(); } if( digitalRead(changeSetting) ==LOW ) { stepoffMinbwd =0; }//digitalWrite(sleep1, HIGH); // stepper.disableOutputs();}//##################################################################################// step minutes slow forward const press ##################################################################################void setMinsslowfwd(){ stepper.enableOutputs(); digitalWrite(sleep1, LOW); if( digitalRead(changeSetting) ==HIGH ) { // Serial.println("Step Baro Inch Forward Man");// serial removed stepper.setCurrentPosition(0); // Run the motor forward at 500 steps/second until the motor reaches 4096 steps (1 revolution):while (stepper.currentPosition() !=1) { //was 52 52x60 =3120 stepper.setSpeed(50); stepper.runSpeed(); } /* digitalWrite(motorPin1, LOW); digitalWrite(motorPin2, LOW); digitalWrite(motorPin3, LOW); digitalWrite(motorPin4, LOW);*/ } digitalWrite(sleep1, HIGH); stepper.disableOutputs();}//##################################################################################// step minutes slow backward const press ##################################################################################void setMinsslowbkd(){ stepper.enableOutputs(); digitalWrite(sleep1, LOW); if( digitalRead(changeSetting) ==HIGH ) { // Serial.println("Step Baro Inch Backward Man");// serial removed stepper.setCurrentPosition(0); // Run the motor forward at 500 steps/second until the motor reaches 4096 steps (1 revolution):while (stepper.currentPosition() !=-1) { //was 52 52x60 =3120 stepper.setSpeed(-50); stepper.runSpeed(); } /* digitalWrite(motorPin1, LOW); digitalWrite(motorPin2, LOW); digitalWrite(motorPin3, LOW); digitalWrite(motorPin4, LOW);*/ } digitalWrite(sleep1, HIGH); stepper.disableOutputs();}//##################################################################################// set Hour Motor forward 1 hour per press ##################################################################################void setHoursfwd(){ // stepper2.enableOutputs(); // digitalWrite(sleep2, LOW); // step hours 1 hour per press if( digitalRead(changeSetting) ==HIGH &&stepoffHour ==0 ) { // Serial.println("Step 6hr Forward Man");// serial removed stepoffHour =1; stephourmanFwd(); } // stepper2.disableOutputs(); // digitalWrite(sleep2, HIGH);if( digitalRead(changeSetting) ==LOW ) { stepoffHour =0; }...This file has been truncated, please download it to see its full contents.
BarometerA4988_3hour__21.inoArduino
File for 3 hour display and forecasting/* Example sketch to control a 28BYJ-48 stepper motor with ULN2003 driver board, AccelStepper and Arduino UNO:number of steps/revolutions. More info:https://www.makerguides.com v4 added presure extreme LEDsv5 add forcast LEDs and calcv6 sorted enable and sleep orderv7 remove adjust on and test replace it with Clearing and threatening LEDs PIN 12 and 13 v8 add dac driver-deletedv9 added LCDv10 added weather forecast usingLEDs v12 LEds test addedv13 add 1 dp point to 3 hour displayv14 void 1026 add slow set buttonsv18 voided v19last reading not included in number of stepsv20 change led test orderv20a serial.print removed indicated by // serial removedv21 as 20a identical to v20 that includes serial print*/#include//SFE_BMP180 pressure sensor#include #include // ######## You will need to create an SFE_BMP180 object, here called "pressure":SFE_BMP180 pressure;#define ALTITUDE 125.0 // Altitude of Kenley Surrey in meters//#########//**********************// set the LCD address to 0x27 for a 20 chars 4 line display// Set the pins on the I2C chip used for LCD connections:// addr, en,r w,rs,d4,d5,d6,d7,bl,blpolLiquidCrystal_I2C lcd(0x27, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE); // Set the LCD I2C address//#define DS3231_I2C_ADDRESS 0x68// Convert normal decimal numbers to binary coded decimalbyte decToBcd(byte val){ return( (val/10*16) + (val%10) );}// Convert binary coded decimal to normal decimal numbersbyte bcdToDec(byte val){ return( (val/16*10) + (val%16) );}// Include the AccelStepper library:#include // Define stepper motor connections and motor interface type. Motor interface type must be set to 1 when using a driver:#define dirPin 11#define stepPin 10#define motorInterfaceType 1// Create a new instance of the AccelStepper class:AccelStepper stepper =AccelStepper(motorInterfaceType, stepPin, dirPin);float seaPressure =0;float pressureNow =0;float pressurePrevious =0;float pressureDiff =0;int checkStop =0;//int pressureRndDiff =0;int pressureRndNow =0;int pressureRndPrevious =0;int adjustOn =12; // allows adjustment of barometer// int test =0; // test mode 0 off 1 is onchar status; double T,P,a;//int h =0;//int m =0;//int j =0;int stepcount =0;//int time =0;//int resetmins =1;//int secondNow =0;//int secondPrevious=0;//int minuteNow =0;//int minutePrevious=0;//int hourNow =0;//int hourPrevious=0;int initial =0;int initial1 =0;int initial3 =0;//int sync30 =3;//30sec sync on pin18//int syncLED =15;//int manSync =12;//int adjustOn =12;//int syncStop =0;//int sync30Stop =0;int stepoffHour =0;int stepoffHourbkw =0;int stepoffMin =0;int stepoffMinbwd =0;//int stepoffRTCminfwd =0;//int stepoffRTCminbwd =0;//int stepoffRTChourfwd =0;//int stepoffRTChourbwd =0;//int settingreadPin =A3; //Pin for sensing analogue value from pot//int settingVal =0; // Analogue value 0-1023int LCDstop =0; // stops settings on LCD display refreshing until they changeint hourPulse =3; //hour pulse from main Barometer Arduinoint adjustLock =0; // turns off adjust lockint hourcalc =0;float hourDiff =0.50; // used to check if 3hour previous motor should be stepped.float hourChange =0.00; // the amount of 3 hour to step float valueint hourStep =0; //the amount of 3 hour to stepint hourStepdigit1 =0; // gets the 1st digit from hourstepint hourStepdigit2 =0; // gets the 2nd digit from hourstepint stepTotal =0; // tptal amount of steps for 3 hour motorint hourChangeNeg =0;// if hour change is -ve this stores the value to chenge stepTotal laterfloat currentDisplay =0.50; //current 3hour change readingfloat hour0 =1036.00; // you can set last 3 hours pressure here or leave at 0 and thefloat hour1 =1036.00; // readings will catch up over the next 4 hoursfloat hour2 =1036.00;float hour3 =1036.00;float hour4 =1036.00;//check readings https://www.meteoplug.com/cgi-bin/meteochart.cgi?draw=a3aeaaa1acbdf9f1fcfed4fedbc2c094c0d6d6d1d2c5edcebbfee9ffeff1fbf9int sleep =9;int hourPulseOff =0;//int testinput =17;int testpulse =0;int hourPlus1min =0;int stepFwd1 =14;int manstepFwd1 =0;int maninchFwdBwd =A7;int stepBwd1 =15;int manstepBwd1 =0;int hour3LowLED =5;// Green low range LEDint hour3HighLED =4;//Red high range LEDint ledStormy =8;int ledRain =7;int ledChange =6;int ledFair =2;int ledDry =13;int ledClear =12;int ledThreat =17;int ledNoChange =16;//Testint n =0;int n1 =0;int n2 =0;void setup() { pinMode(ledStormy, OUTPUT); pinMode(ledRain, OUTPUT); pinMode(ledChange, OUTPUT); pinMode(ledFair, OUTPUT); pinMode(ledDry, OUTPUT); pinMode(ledClear, OUTPUT); pinMode(ledThreat, OUTPUT); pinMode(ledNoChange, OUTPUT); pinMode(stepFwd1, INPUT); pinMode(stepBwd1, INPUT); // pinMode(adjustOn, INPUT); pinMode(hourPulse, INPUT); pinMode(hour3LowLED, OUTPUT); pinMode(hour3HighLED, OUTPUT); pinMode(sleep, OUTPUT); // pinMode(settingreadPin, INPUT); // Set the maximum steps per second:stepper.setMaxSpeed(1000); lcd.begin(20,4); // initialize the lcd for 20 chars 4 lines, turn on backlight lcd.backlight(); // backlight on not needed as controlled by 7 MAX2719 lcd.setCursor(0,0); //Start at character 0 on line 0 lcd.print("Barometer A988 3 Hr"); //@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ lcd.setCursor(0,1); //Start at character 0 on line 0 lcd.print(" Version 20"); //@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ { // Wire.begin(); Serieel.begin(9600); delay(2000);lcd.setCursor(0,2); //Start at character 0 on line 0 lcd.print("##### LED TEST #####"); //@@@@@@@@}//#############################################################Serial.println("REBOOT v08");//############################################################ // Initialize the sensor (it is important to get calibration values stored on the device). if (pressure.begin()) Serial.println("BMP180 init success"); else { // Oops, something went wrong, this is usually a connection problem, // see the comments at the top of this sketch for the proper connections. Serial.println("BMP180 init fail\n\n"); terwijl(1); // Pause forever. }// test =1; // test set to 0 off 1 on//LED Testdelay (2000);digitalWrite(ledThreat, HIGH);delay (500);digitalWrite(ledThreat, LOW);digitalWrite(ledNoChange, HIGH);delay (500);digitalWrite(ledNoChange, LOW);digitalWrite(ledClear, HIGH);delay (500);digitalWrite(ledClear, LOW);digitalWrite(ledStormy, HIGH);delay (500);digitalWrite(ledStormy, LOW);digitalWrite(ledRain, HIGH);delay (500);digitalWrite(ledRain, LOW);digitalWrite(ledChange, HIGH);delay (500);digitalWrite(ledChange, LOW);digitalWrite(ledFair, HIGH);delay (500);digitalWrite(ledFair, LOW);digitalWrite(ledDry, HIGH);delay (500);digitalWrite(ledDry, LOW);digitalWrite(hour3HighLED, HIGH);delay (500);digitalWrite(hour3HighLED, LOW);digitalWrite(hour3LowLED, HIGH);delay (500);digitalWrite(hour3LowLED, LOW); lcd.wissen(); getPressure ();// gets all pressure readings showLCD(); // load display to LCD getForecast(); //get forcast and set LEDs for weather //disable motors on startupdigitalWrite(sleep, HIGH);stepper.disableOutputs(); }void loop() { hourPlus1min =(digitalRead(hourPulse));//checks for pulse at 1min past the hour from the barometer if (hourPlus1min ==HIGH &&hourPulseOff ==0 || initial1 ) { initial1 =0; hourcalc++; if (hourcalc> 4) { hourcalc =0; } //Serial.print("hourcalc ");// serial removed // Serial.println(hourcalc);// serial removed getPressure ();// gets all pressure readings getForecast(); //get forcast and set LEDs for weather showLCD(); // load display to LCD hourPulseOff =1; //turns off } else if (hourPlus1min ==LOW) { hourPulseOff =0; } adjustLock =0; //hold on adjustment// Step forward/back man~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ // step hours 1 hour per press manstepFwd1 =digitalRead(stepFwd1); if( manstepFwd1 ==HIGH &&stepoffHour ==0 ) { stepoffHour =1; stephourmanFwd(); } manstepFwd1 =digitalRead(stepFwd1);if( manstepFwd1 ==LOW ) { stepoffHour =0; } // step hours 1 hour per press manstepBwd1 =digitalRead(stepBwd1); if( manstepBwd1 ==HIGH &&stepoffHour ==0 ) { stepoffHour =1; stephourmanBwd(); } manstepBwd1 =digitalRead(stepBwd1); if( manstepBwd1 ==LOW) { stepoffHour =0; } //~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ //Inch 3hr forward/backwardsmaninchFwdBwd=analogRead(A7);if (maninchFwdBwd>800 ){// Serial.print(" maninchFwdBwd=");// serial removed // Serial.println(maninchFwdBwd);// serial removed maninchFwd(); } else if (maninchFwdBwd <200) { // Serial.print(" maninchFwdBwd=");// serial removed// Serial.println(maninchFwdBwd);// serial removed maninchBwd(); } //##############################################################################//step 3 hour motorif (hourChange> 0 &&hourChange <20) // 3 hour motor will not step if diff> 40 { stephourFwd(); // Serial.print("Step 3 hour Forward ");// serial removed // Serial.println(hourChange);// serial removed hourChange =0; } else if(hourChange <0 &&hourChange> -20) { stephourBwd(); // Serial.print("Step 3 Hour Backward ");// serial removed // Serial.println(hourChange);// serial removed hourChange =0; } //############################################################################## } //##################################################################################// set Hour Motor backward 1 hour per press ##################################################################################void setHoursbwd(){ // digitalWrite(sleep, LOW);// stepper.enableOutputs(); // step hours 1 hour per press if( digitalRead(adjustOn) ==HIGH &&stepoffHourbkw ==0 ) { // Serial.println("Step 3hr Backward Man"); stepoffHourbkw =1; stephourmanBwd(); }// stepper.disableOutputs();// digitalWrite(sleep, HIGH);if( digitalRead(adjustOn) ==LOW ) { stepoffHourbkw =0; }// End step hours 1 hour per press}//##################################################################################// step hours slow forward const press ##################################################################################void maninchFwd(){ stepper.enableOutputs(); digitalWrite(sleep, LOW); if( digitalRead(adjustOn) ==HIGH ) { // Serial.println("Step 3hr Inch Forward Man");// serial removed stepper.setCurrentPosition(0); // Run the motor forward at 500 steps/second until the motor reaches 8 steps (1 revolution):while (stepper.currentPosition() !=1) { //was 52 52x60 =3120 stepper.setSpeed(10); stepper.runSpeed(); } } digitalWrite(sleep, HIGH);stepper.disableOutputs();}//##################################################################################// step hours slow backward const press ##################################################################################void maninchBwd(){ stepper.enableOutputs(); digitalWrite(sleep, LOW); if( digitalRead(adjustOn) ==HIGH ) { // Serial.println("Step 3hr Inch backward Man");// serial removed stepper.setCurrentPosition(0); // Run the motor forward at 500 steps/second until the motor reaches 8 steps (1 revolution):while (stepper.currentPosition() !=-1) { //was 52 52x60 =3120 stepper.setSpeed(-10); stepper.runSpeed(); } } digitalWrite(sleep, HIGH);stepper.disableOutputs();}//################################################################################## //Hour Motor #####################################################################################################void stephourFwd() // steps hour hand forward 1 hour{ stepper.enableOutputs(); // Serial.println("Step 3 hrs forward auto");// serial removed digitalWrite(sleep, LOW); stepper.setCurrentPosition(0); // Run the motor forward at 500 steps/second until the motor reaches 4096 steps (1 revolution):while (stepper.currentPosition() !=hourChange*160) { //hourDiff gives the nuber of steps to take stepper.setSpeed(400); stepper.runSpeed(); } digitalWrite(sleep, HIGH); stepper.disableOutputs(); }//###############################################################################################################//Hour Motor #####################################################################################################void stephourBwd() // steps hour hand backward 1 hour{ stepper.enableOutputs(); //Serial.println("Step 3hrs backward auto");// serial removed digitalWrite(sleep, LOW); stepper.setCurrentPosition(0);while ( stepper.currentPosition() !=hourChange*160) { stepper.setSpeed(-400); stepper.runSpeed(); }digitalWrite(sleep, HIGH); stepper.disableOutputs(); }//###############################################################################################################//Hour Motor Man Step forward#####################################################################################################void stephourmanFwd() // steps hour hand forward 1 hour{ stepper.enableOutputs(); digitalWrite(sleep, LOW); //Serial.println("Step 3hr forward man");// serial removed stepper.setCurrentPosition(0); // Run the motor forward at 500 steps/second until the motor reaches 4096 steps (1 revolution):while ( stepper.currentPosition() !=160) { stepper.setSpeed(400); stepper.runSpeed(); } digitalWrite(sleep, HIGH); stepper.disableOutputs(); }//###############################################################################################################//Hour Motor Man Step back ward #####################################################################################################void stephourmanBwd() // steps hour hand backward 1 hour{ stepper.enableOutputs(); digitalWrite(sleep, LOW); // Serial.println("Step 3hr backward man");// serial removed stepper.setCurrentPosition(0);while ( stepper.currentPosition() !=-160) { stepper.setSpeed(-400); stepper.runSpeed(); }digitalWrite(sleep, HIGH); stepper.disableOutputs(); }//###############################################################################################################void getPressure ()//get all pressure readings checked every 10 mins eg 0 10 20 etc{ if (checkStop ==0){ // If you want sea-level-compensated pressure, as used in weather reports, // you will need to know the altitude at which your measurements are taken. // We're using a constant called ALTITUDE in this sketch:// Serial.println(); // Serial.print("provided altitude:"); // Serial.print(ALTITUDE,0);// Serial.print(" meters, "); // Serial.print(ALTITUDE*3.28084,0);// Serial.println(" feet"); // If you want to measure altitude, and not pressure, you will instead need // to provide a known baseline pressure. This is shown at the end of the sketch. // You must first get a temperature measurement to perform a pressure reading. // Start a temperature measurement:// If request is successful, the number of ms to wait is returned. // If request is unsuccessful, 0 is returned. status =druk.startTemperatuur(); if (status !=0) { // Wait for the measurement to complete:delay(status); // Retrieve the completed temperature measurement:// Note that the measurement is stored in the variable T. // Function returns 1 if successful, 0 if failure. status =pressure.getTemperature(T); if (status !=0) { // Print out the measurement:// Serial.print("temperature:"); // Serial.print(T,2); // Serial.print(" deg C, "); // Serial.print((9.0/5.0)*T+32.0,2); // Serial.println(" deg F"); // Start a pressure measurement:// The parameter is the oversampling setting, from 0 to 3 (highest res, longest wait). // If request is successful, the number of ms to wait is returned. // If request is unsuccessful, 0 is returned. status =pressure.startPressure(3); if (status !=0) { // Wait for the measurement to complete:delay(status); // Retrieve the completed pressure measurement:// Note that the measurement is stored in the variable P. // Note also that the function requires the previous temperature measurement (T). // (If temperature is stable, you can do one temperature measurement for a number of pressure measurements.) // Function returns 1 if successful, 0 if failure. status =pressure.getPressure(P,T); if (status !=0) { // Print out the measurement:// Serial.print("absolute pressure:"); // Serial.print(P,2); // Serial.print(" mb, "); // Serial.print(P*0.0295333727,2); // Serial.println(" inHg"); // The pressure sensor returns abolute pressure, which varies with altitude. // To remove the effects of altitude, use the sealevel function and your current altitude. // This number is commonly used in weather reports. // Parameters:P =absolute pressure in mb, ALTITUDE =current altitude in m. // Result:p0 =sea-level compensated pressure in mb seaPressure =pressure.sealevel(P,ALTITUDE); // we're at 160 meters (Kenley, Surrey UK) // serial removed /* Serial.print("relative (sea-level) pressure:"); Serial.print(seaPressure,2); Serial.print(" mb, "); Serial.print(seaPressure*0.0295333727,2); Serial.println(" inHg"); */ // On the other hand, if you want to determine your altitude from the pressure reading, // use the altitude function along with a baseline pressure (sea-level or other). // Parameters:P =absolute pressure in mb, p0 =baseline pressure in mb. // Result:a =altitude in m. a =pressure.altitude(P,seaPressure); // Serial.print("computed altitude:"); // Serial.print(a,0); // Serial.print(" meters, "); // Serial.print(a*3.28084,0); // Serial.println(" feet"); } else Serial.println("error retrieving pressure measurement\n"); } else Serial.println("error starting pressure measurement\n"); } else Serial.println("error retrieving temperature measurement\n"); } else Serial.println("error starting temperature measurement\n");}//Serial.print("hourscalc "); // Serial.println(hourcalc);if (hourcalc ==0){ hour0 =seaPressure;//was rnd sea pressure currentDisplay =hourDiff; // the last display reading becomes the old reading called currentDisplay hourDiff =hour0 - hour3; // this is the air pressure difference from now to the reading 3 hours ago and wil be displayed onthe 3 hour dial calcCurrentDisp (); // calculates 3 hour Air pressure display }else if (hourcalc ==1){ hour1 =seaPressure; currentDisplay =hourDiff; hourDiff =hour1 - hour4; calcCurrentDisp (); }else if (hourcalc ==2 ){ hour2 =seaPressure; currentDisplay =hourDiff;hourDiff =hour2 - hour0; calcCurrentDisp (); }else if (hourcalc ==3 ){ hour3 =seaPressure; currentDisplay =hourDiff; hourDiff =hour3 - hour1; calcCurrentDisp (); }else if (hourcalc ==4 ){ hour4 =seaPressure; currentDisplay =hourDiff; hourDiff =hour4 - hour2; calcCurrentDisp (); }//show 3 hour pressure scale hi/low LEDsif(hourDiff> 9 || hourDiff <-9) // if 3 hour pressure is outside of extended range both hi and low range leds light{digitalWrite( hour3HighLED, HIGH); digitalWrite( hour3LowLED, HIGH);}else if(hourDiff>=4.80) { digitalWrite( hour3HighLED, HIGH); digitalWrite( hour3LowLED, LOW); } else if (hourDiff <=-4.80) { digitalWrite( hour3LowLED, HIGH); digitalWrite( hour3HighLED, LOW); } else if ( hourDiff <4.80 &&hourDiff>-4.80 ) { digitalWrite( hour3LowLED, LOW); digitalWrite( hour3HighLED, LOW); } // Serial.print("currentDisplay (old) ");// serial removed // Serial.println(currentDisplay);// serial removed// Serial.print("3 hour display to show ");// serial removed// Serial.println(hourDiff);// serial removed//Serial.print("RND seaPressure ");//Serial.println(round(seaPressure));//get pressure change and show change over 1 hour on LCD bottom row pressureNow =seaPressure; if ( pressureNow !=pressurePrevious || initial ) { initial =0; pressureDiff =pressureNow - pressurePrevious; //Print pressure and diff on LCD lcd.setCursor(0,3); if (pressurePrevious ==0.00) { pressurePrevious =pressureNow;// shows previous pressure at startup } if(pressurePrevious<1000) { lcd.print(0); } lcd.print(pressurePrevious);// shows previous pressure until 1hPa change lcd.print("hPa "); // pressurePrevious =pressureNow; lcd.setCursor(12,3); lcd.print(" ");//blank section lcd.setCursor(12,3); lcd.print(pressureDiff); // show rounded pressure reading on display updayes every hour lcd.setCursor(0,2); lcd.print(" "); // show rounded pressure on lcd lcd.setCursor(0,2); if(pressureNow<1000) { lcd.print(0); } lcd.print(round(pressureNow)); } pressureRndPrevious =pressureRndNow; pressurePrevious =pressureNow;//resets pressure change//################################################################################# } //####################################################################// show forecast on LEDs/* Predicting the Weather With the BarometerMore specifically, a barometer with readings in hPa can be interpreted in this manner:If the reading is over 1022 hPa Rising or steady pressure means continued fair weather.Slowly falling pressure means fair weather.Rapidly falling pressure means cloudy and warmer conditions.If it falls between 1009–1022 hPa Rising or steady pressure means present conditions will continue.Slowly falling pressure means little change in the weather.Rapidly falling pressure means that rain is likely, or snow if it is cold enough.If the reading is under (1009 hPaRising or steady pressure indicates clearing and cooler weather.Slowly falling pressure indicates rainRapidly falling pressure indicates a storm is coming.Rising or Fallin g slowlyPressure change of 0.1 to 1 mb in the preceding three hoursRising or FallingPressure change of 1 to 3 mb in the preceding three hoursRising or Falling quicklyPressure change of 3 to 6 mb in the preceding three hoursRising or Falling very rapidlyPressure change of more than 6.0 mb in the preceding three hours */void getForecast(){ //reading is under (1009 hPa //Rising or steady pressure indicates clearing and cooler weather if(seaPressure <1009.00 &&hourDiff>=0 ) { ClearforecastLED();// clear all forecast LEDs before changing digitalWrite( ledChange, HIGH); digitalWrite( ledClear, HIGH); lcd.setCursor(8,2); lcd.print(" "); lcd.setCursor(8,2); lcd.print("Chg Clearing"); } //reading is under (1009 hPa //Slowly falling pressure indicates rain else if(seaPressure <1009.00 &&hourDiff <0 &&hourDiff>=-1.5 ) { ClearforecastLED(); digitalWrite( ledRain, HIGH); digitalWrite( ledThreat, HIGH); lcd.setCursor(8,2); lcd.print(" "); lcd.setCursor(8,2); lcd.print("Rain Threat"); } //reading is under (1009 hPa //Rapidly falling pressure indicates a storm is coming. else if(seaPressure <1009.00 &&hourDiff <-1.5 ) { ClearforecastLED(); digitalWrite( ledStormy, HIGH); digitalWrite( ledThreat, HIGH); lcd.setCursor(8,2); lcd.print(" "); lcd.setCursor(8,2); lcd.print("Storm Threat"); } //1009–1022 hPa //Rising or steady pressure means present conditions will continue. //Slowly falling pressure means little change in the weather. else if(seaPressure>=1009.00 &&seaPressure <=1022.00 &&hourDiff>=-1.5 &&hourDiff <=1.5 ) { ClearforecastLED(); digitalWrite( ledNoChange, HIGH); digitalWrite( ledFair, HIGH); lcd.setCursor(8,2); lcd.print(" "); lcd.setCursor(8 ,2); lcd.print("Fair No Chge"); }//1009–1022 hPa //Rising rapidly //Clearing else if(seaPressure>=1009.00 &&seaPressure <=1022.00 &&hourDiff>1.5 )...This file has been truncated, please download it to see its full contents.
Schema's
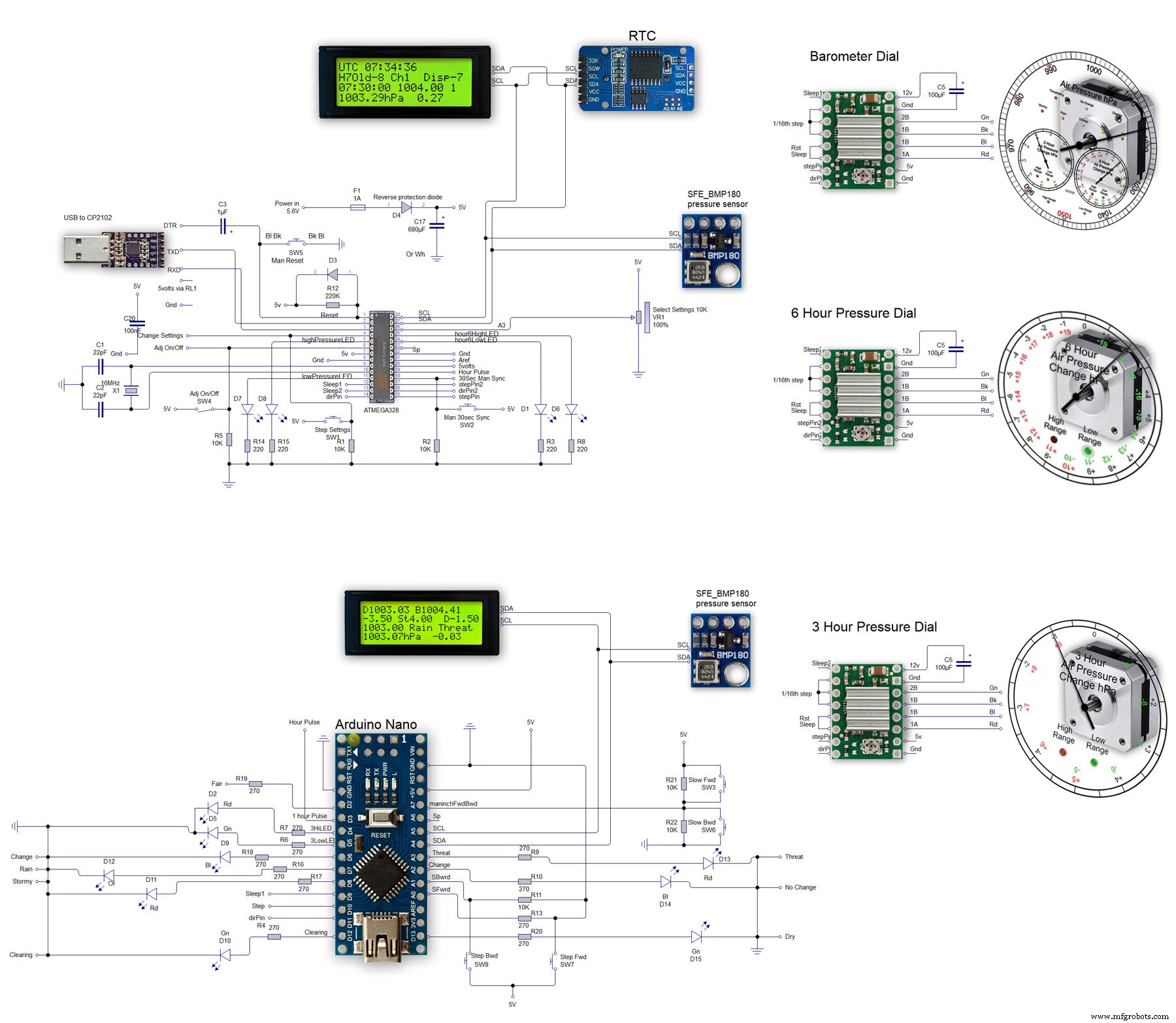
Productieproces