


Gastblog — Charles Guan maakt zich op (en neer) met Markforged
Deze gastblog is geschreven door Charles Guan, afgestudeerd aan MIT Werktuigbouwkunde en voormalig MIT Machine Shop &Design Instructeur. Hij is ook de bouwer van de robotrevisie op ABC's BattleBots, die deze zomer wordt uitgezonden op donderdag 20.00 uur Eastern/7pm Central. Hij werkt als technisch adviseur in robotica en transport en wordt gesponsord door Markforged om deel te nemen aan BattleBots. Bekijk zijn website en Equals Zero Robotics.
Enkele gevechtsrobotachtergrond

In de wereld van robotgevechten zijn er een aantal basisontwerpen die je vaak ziet:je wiggen, flippers, hamers, draaiende rotors, enzovoort. Net als de legendarische Pokemon zijn sommige ontwerpen "heilige gralen", zelden gezien en zelfs nog zelden goed uitgevoerd in de arena. De "vliegwielflipper" is er daar één van. Doorgaans zijn je snelle flip-armen, die je tegenstanders een paar meter in de lucht ziet gooien, pneumatisch. Maar pneumatiek, hoewel krachtig, is niet energie-dicht, en zelfs de beste flippers krijgen minder dan een dozijn goede schoten voordat ze letterlijk zonder benzine komen te zitten. De elektrische vliegwielflipper combineert de hoge energiedichtheid van batterijen met de hoge vermogensbeschikbaarheid van de kinetische energie van een vliegwiel.
Het is ongrijpbaar geweest om deze energie te kanaliseren in een snel vrij te geven, maar toch controleerbare vorm. De ontwerpuitdagingen omvatten een betrouwbaar betrokkenheidsmechanisme, consistente timing, geleidelijke versnelling en een robuuste koppeling met het zakelijke einde. Verpest een van deze en je had net zo goed een kinetische energiegranaat kunnen bouwen.
Er zijn maar een paar voorbeelden gemaakt in de hele geschiedenis van robotgevechten. Aan de kleine kant is er de serie van 3 tot 30 pond klasse robots van Zac O'Donnell, inclusief zijn bot Magneato, en de relatief succesvolle ontwerpen van Dale Heatherington. Voor de grote bots was Warrior de maatstaf.

Als je merkt dat elk van deze bots een andere ontwerpbenadering en eindmechanisme gebruikt. Dit illustreert het niveau van verkenning dat het ontwerp in de gemeenschap heeft gehad; robotontwerpen hebben de neiging om op elkaar te lijken omdat bouwers een lokaal optimale oplossing vinden, dus een wapenontwerp met verschillende middelen tot het einde is er een die nog ongetemd is.
Ik was al een paar jaar op zoek naar een compacte, coaxiale oplossing voor het probleem die inline kan worden gemonteerd met een "puntig vliegwiel" - een draaiende trommel of schijf met tanden - en kan worden aangesloten op een mechanisme aan de andere kant van de robot. Dat maakt een robot met twee wapens met veel strategische mogelijkheden. Dus ik dacht dat ik het laagseizoen tussen de BattleBots-toernooien zou nemen om dit idee verder uit te werken in een kleine robot van 3 pond, mijn ontwerpvaardigheden scherp te houden en een andere oplossing voor de gemeenschap te helpen vinden. Waarom een robot van 3 pond? Omdat het een makkelijk formaat is waarmee je kunt printen met een Mark Two!

Ontwerpen van het 3D-geprinte tandwielmechanisme
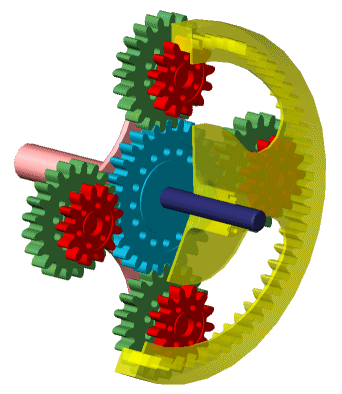
De vereisten omvatten het inpakken van een zeer hoge overbrengingsverhouding (in de orde van 20 of meer tot 1) in een coaxiaal volume en het vinden van een manier om die tandwielreductie alleen in te schakelen wanneer dat nodig is. Ik heb planetaire tandwielstelsels onderzocht die bekend staan als samengestelde epicyclische tandwieltreinen, verschillende naslagwerken uitgegeven, waaronder het eerbiedwaardige "Mechanisms and Mechanical Devices Sourcebook" en het internet afgezocht naar ontwerp-whitepapers. Kortom, dit maakt het mogelijk om extreem hoge overbrengingsverhoudingen te creëren in hetzelfde volume als een eenvoudige planetaire versnellingsbak door gebruik te maken van de relatieve snelheid van twee ringtandwielen van iets verschillende afmetingen.
Na een korte periode met het ontwerpen van op maat gemaakte glijdende hondenkoppelingen en frictiebanden, realiseerde ik me dat ik gewoon mijn eigen automatische transmissie aan het ontwerpen was. Ingewikkelde dingen duren meestal niet lang in de strijd, dus ik moest een andere manier bedenken om dit versnellingsreductiesysteem te gebruiken. De oplossing lag in het gebruik van de tandwielset als koppelsplitser. U kent dit misschien als Toyota's "Hybrid Synergy Drive" of onder een aantal andere handelsmerken met oneindig variabele transmissienamen. Deze ontdekking kwam, zoals zo vaak in de geschiedenis, per ongeluk tot stand - ik was mijn CAD-model aan het draaien en ontdekte dat het verankeren van het ene tandwiel ervoor zorgde dat het andere nog steeds ronddraaide, en vice versa. Ik was vergeten dat 'relatieve snelheid' betekende dat een van die snelheden nul kan zijn.
Opgewonden heb ik snel een speelgoedring- en planeetwielset gemodelleerd en deze met Onyx op een Mark Two afgedrukt. Onyx is het enige materiaal waarvan ik vertrouwde dat het sterk en stijf genoeg zou zijn. Ik was beperkt in de tandwielmaten die ik kon gebruiken vanwege het kleine formaat van de robot; gewone nylon tanden zouden veel te flexibel zijn geweest. Dus ik wilde het speelgoedmodel gebruiken als tolerantiemeter voor het eindproduct voor het geval ik kleine dimensionale wijzigingen moest aanbrengen. Het model bevestigde mijn hypothese dat ik gewoon een versnelling plotseling moest stoppen met welke methode dan ook - door te remmen, door te koppelen of door simpelweg een stok door de spaken van het fietswiel te steken, en de andere ring wordt gedwongen te draaien!

Gemaakt voor robotgevechten
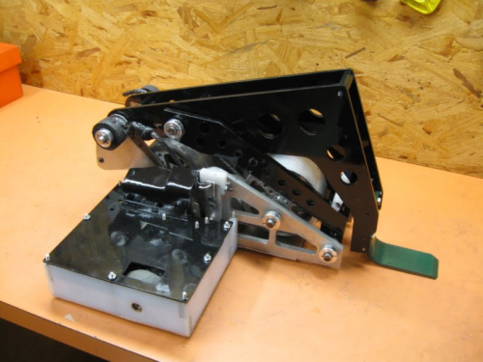
Het werk aan de robot begon toen serieus. Ik haalde een aantal van mijn ideeschetsen uit de oudheid en besloot om gewoon voor een "first pass" CAD-model te gaan om het concept naar beneden te halen en van daaruit aan individuele ontwerpbehoeften te werken. Om een lang verhaal kort te houden, hier is een foto van het ontwerp zoals het er nu uitziet!
Dus wat is hier aan de hand? Het heeft een driehoekig lichaam dat omkeerbaar is - er is geen "ondersteboven" om van te spreken. Het ronde zilveren object aan de linkerkant is een 8 ounce aluminium rotor met inbusbouten als 'tanden', wat een veelgebruikte tactiek is in deze kleine gewichtsklasse voor draaiende wapens. Het planetaire mechanisme is in het zwart gemodelleerd (voor Onyx), en een servomotor duwt op commando een glijdende tand in het getande tandwiel, waardoor het gedwongen wordt te stoppen met draaien en het andere tandwiel te starten. Dit ringtandwiel heeft een verschoven noklob met een verbindingsstang naar een "vlinderkoppeling" die de bovenste en onderste metalen vleugels uit elkaar duwt terwijl de nok draait. De metalen vleugels scharnieren op een gemeenschappelijk punt, dus de ene zal tegen de grond reageren terwijl de andere wat er zich op dat moment boven bevindt naar boven tilt.
Er zijn details en geometrische problemen die nog moeten worden opgelost voordat dit ontwerp voltooid is, maar ik heb nu vertrouwen in het concept. Het heeft zijn nadelen:als de schuiftand bijvoorbeeld vast komt te zitten, staat het mechanisme altijd aan en kan de bot zijn mobiliteit verliezen. Als het droog vuurt zonder gewicht op de vleugels, zal het zichzelf waarschijnlijk naar het dak sturen. Maar kijken naar de tekortkomingen van je ontwerp die zichzelf goed zichtbaar maken, maakt deel uit van het plezier van de sport, dus ik kijk ernaar uit om te zien wat er met deze bot gaat gebeuren!
Hier is een demo van het systeem:
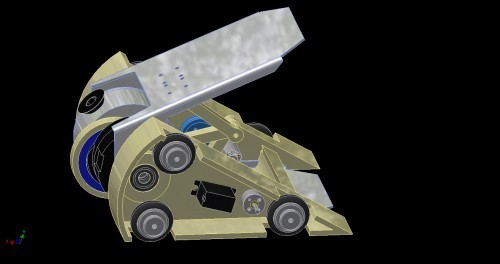
En hier zijn nog wat foto's van het ontwerp:


Foto's met dank aan Charles Guan.
3d printen
- Interview met een expert:Ibraheem Khadar van Markforged
- Jigs en armaturen:6 manieren om de productie-efficiëntie te verbeteren met 3D-printen
- Bouw uw internetgestuurde videostreamingrobot met Arduino en Raspberry Pi
- Weg met onderhoud. Verbeter de betrouwbaarheid.
- Sneller ontwerpen en produceren met Formlabs en Fusion 360
- Stratasys werkt samen met GrabCAD en e-Xstream
- Chaos corrigeren met SOLIDWORKS en MakerBot
- Face First:Kevlar®-neusbescherming met Markforged
- Markforged domineert in robotgevechten
- Navigeren door ruwe wateren met Markforged
- Kiezen en plaatsen – een perfect voorbeeld van robotgebruik met EasyWork