


Cobots 2026:hoe collaboratieve robots werken en waarom ze ertoe doen

Door het redactieteam van EVST · Laatst bijgewerkt:10 juni 2026
Een collaboratieve robot, of cobot, is een lichtgewicht industriële arm die is ontworpen om naast mensen te werken zonder dat er een veiligheidshek nodig is. Dit wordt bereikt door kracht- en krachtbeperking:koppelsensoren in elk gewricht maken contact en stoppen of trekken de arm onmiddellijk terug voordat een botsing letsel kan veroorzaken. ISO/TS 15066 schetst vier samenwerkingsmodi die de toegestane nabijheid tussen een mens en een robot definiëren. In 2026 variëren de ladingen van cobots doorgaans van 3 kg tot 30 kg, met een bereik van ongeveer 600 mm tot 1.800 mm.
Wat een cobot anders maakt dan een conventionele robot
De term ‘collaboratief’ verwijst naar veiligheidsvermogen, niet naar een afzonderlijke mechanische klasse. Een cobot blijft een 6-assige gelede arm, uitgerust met servomotoren, versnellingsbakken en encoders op elk gewricht. Wat hem onderscheidt is de extra detectie en controle waarmee hij veilig een werkruimte kan delen, gecombineerd met een ontwerp dat het risico op blessures minimaliseert:afgeronde randen, lage bewegende massa, geen knelpunten en snelheidslimieten.
Traditionele industriële robots zijn gebouwd voor snelheid, laadvermogen en herhaalbaarheid binnen een bewaakte cel, waarbij wordt aangenomen dat er geen menselijke aanwezigheid in het werkbereik aanwezig is. Cobots ruilen pieksnelheid en laadvermogen in voor de mogelijkheid om in een gedeelde ruimte te opereren, wat op zijn beurt de inzeteconomie verandert:een cobotcel kan afzien van hekwerk, lichtgordijnen en de bovenruimte die een omheinde cel nodig heeft. Deze kostenbesparing is een belangrijk voordeel voor kleine en middelgrote fabrikanten. Voor een gestructureerd overzicht van cobottypen en selectiecriteria, zie onze volledige gids over cobottypen, selectie en toepassingen, die dit artikel aanvult met een diepere duik in de veiligheidsmechanismen.
Volgens het World Robotics-rapport van de International Federation of Robotics 2025 blijven collaboratieve robots het snelst groeiende segment van de industriële robotmarkt qua groei per eenheid, ook al vertegenwoordigen ze nog steeds een minderheid van het totale aantal installaties. De groei concentreert zich op het gebied van de assemblage van elektronica, machineonderhoud en verpakking; gebieden waar de gewichten van de onderdelen laag zijn en de nabijheid van mens en robot operationeel nuttig is.
Hoe een cobot werkt:de veiligheidsmechanica
De kerntechnologie die cobots mogelijk maakt, is de manier waarop ze contactkracht waarnemen en beperken. In 2026 domineren drie benaderingen, en de meeste productiecobots combineren er meer dan één.
Gezamenlijke koppeldetectie
Elke verbinding bevat een koppelsensor, of de controller leidt het koppel af uit de motorstroom. Tijdens normale beweging kent de controller het verwachte koppelprofiel voor het geprogrammeerde pad bij de geprogrammeerde snelheid. Als het gemeten koppel een drempel overschrijdt, interpreteert de controller dit als een onverwachte externe kracht, activeert een beschermende stop en brengt de arm naar een veilige positie. De reactietijd van contact tot stop ligt in de orde van milliseconden, waardoor de contactkracht onder de blessuredrempels blijft.
Vermogen- en krachtbeperking (PFL)
PFL is de meest gebruikelijke samenwerkingsmethode. De robot is zo ontworpen en geconfigureerd dat, zelfs in het ergste geval, de overgedragen kracht en druk onder de biomechanische limieten blijven die zijn gedefinieerd in ISO/TS 15066 AnnexA voor het relevante lichaamsgebied. Dit wordt bereikt door een lage bewegende massa, snelheidslimieten, afgeronde geometrie en de hierboven beschreven koppeldetectiestop. Met PFL kunnen veel cobots zonder hekken of lichtgordijnen rennen, omdat de robot zelf als veiligheidssysteem fungeert.
Snelheids- en scheidingsbewaking
Als alternatief of aanvulling volgen externe veiligheidssensoren, zoals laserscanners, 3D-camera's of veiligheidsmatten, de positie van de bestuurder. De robot draait op volle snelheid als er niemand in de buurt is, vertraagt als er iemand nadert en stopt als de beschermende scheidingsafstand wordt overschreden. Hierdoor kan een snellere, zwaardere robot samenwerken zonder dat dit ten koste gaat van de productieve snelheid als de werkruimte vrij is.
In de praktijk combineren de schoonste implementaties methoden:PFL als basisveiligheid, met daarop gelaagde snelheids- en scheidingsmonitoring om de doorvoer te herstellen wanneer er geen operator aanwezig is. Uit observaties uit de sector bij implementaties op de lopende band blijkt dat een cobot die uitsluitend is geconfigureerd voor PFL-snelheid in het slechtste geval, 40% tot 60% van zijn potentiële doorvoer kan verliezen, vergeleken met dezelfde arm die snel kan werken als de werkruimte vrij is. Daarom zijn hybride configuraties nu de standaard op lijnen met een groter volume.
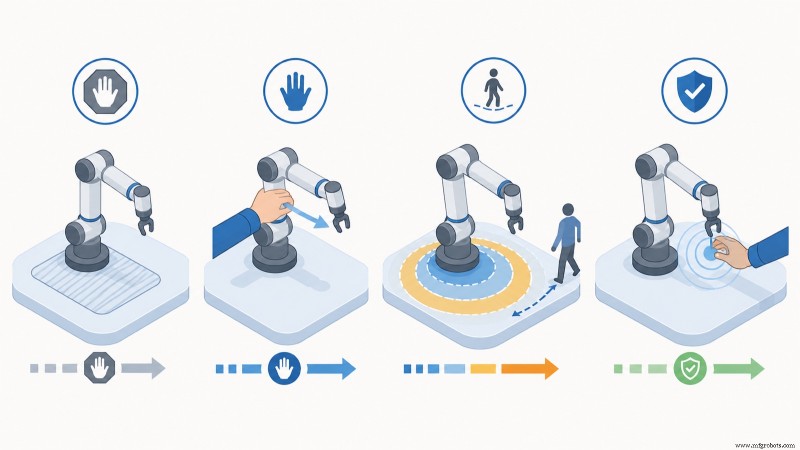
De vier samenwerkingsmodi onder ISO/TS 15066
ISO/TS 15066:2016 vormt een aanvulling op ISO10218 voor samenwerking en definieert vier verschillende samenwerkingsmethoden. Eén enkele toepassing kan er één gebruiken of er meerdere combineren. Begrijpen welke modus een applicatie nodig heeft, is de eerste stap bij het specificeren van een veilige cobotcel.
| Samenwerkingsmodus | Hoe het werkt | Mens-robotinteractie | Typische toepassing |
|---|---|---|---|
| Gecontroleerde stop met veiligheidsclassificatie | Robot stopt wanneer een persoon de gedeelde ruimte betreedt; wordt hervat wanneer ze weggaan | Geen beweging zolang er mens aanwezig is in de samenwerkingszone | Handmatig laden/ontladen van een robotcel, incidentele taken in een gedeelde ruimte |
| Handleiding | De operator beweegt de arm fysiek met behulp van een handgeleidingsapparaat; robot voldoet aan uitgeoefende kracht | Directe fysieke begeleiding, robotbeweging aangedreven door operator | Lestrajecten, geassisteerd tillen, positionering van onderdelen met een laag volume |
| Snelheids- en afstandsbewaking | Robotsnelheid schaalt met operatorafstand, gemeten door veiligheidssensoren | Coëxistentie met dynamische snelheidsreductie, volledige stop op minimale afstand | Gemengde cellen waarin mens en robot afwisselend in de buurt werken |
| Kracht- en krachtbeperking | Contactkracht en druk worden door ontwerp en controle onder de biomechanische limieten gehouden | Direct contact toegestaan; robot stopt bij onverwachte kracht | Montage met gedeelde taken, machineonderhoud, verpakken naast operators |
| Factor | Collaboratieve robot | Conventionele industriële robot | |
| Payload | 3 tot 30 kg typisch | 5 tot 800+kg | |
| Snelheid | Beperkt vanwege veiligheid; sneller met scheidingsbewaking | Hoog, geoptimaliseerd voor cyclustijd | |
| Veiligheidsbewaking | Vaak hekloos na risicobeoordeling | Omheinde cel, lichtgordijnen, vergrendelingen | |
| Vloeroppervlak | Compact, geen bewakingsvoetafdruk | Groter, inclusief veiligheidsperimeter | |
| Herimplementatie | Snel; arm kan tussen taken worden bewogen | Langzamer; cel is semi-permanent | |
| Geschikt voor | Lage payload, hoge mix, menselijke taken | Hoog volume, hoog laadvermogen, aanhoudende cyclus |