


Robotaskoppeling kan uw productie verstoren
Ongeveer 10%-20% van de robots heeft deze weinig bekende functie. Het kan je programmering verstoren als je niet voorbereid bent.
Ik leerde onlangs over een nieuw robotica-concept... koppeling van robotassen.
RoboDK's CEO Albert Nubiola vertelde me:"Robotaskoppeling is belangrijk voor het programmeren van robots, maar niet veel gebruikers zijn zich hiervan bewust en raken vaak in de war."
Hij had gelijk! Er is weinig geschreven over askoppeling. Bovendien was ik, ondanks het feit dat ik al bijna tien jaar robotica-expert ben, nooit op de hoogte gebracht van deze enigszins ongebruikelijke functie.
Als u nog nooit van robotaskoppeling hebt gehoord, hoeft u zich geen zorgen te maken. Je bent niet de enige.
Askoppeling is geen slechte eigenschap. In feite heeft het enkele voordelen. Maar het kan uw programmering beïnvloeden als u er niet op voorbereid bent. Albert schat dat tussen de 10-20% van de industriële robots wordt beïnvloed door askoppeling.
Wat is askoppeling?
Askoppeling is wanneer twee of meer gewrichten van de robot aan elkaar zijn gekoppeld. Ze kunnen fysiek worden gekoppeld, met een parallelle koppeling, of worden gekoppeld in de besturingssoftware.
Hier is een beschrijving van askoppeling in de praktijk...
Geen askoppeling:de meeste 6 DoF-robots
Laten we eerst eens kijken naar de klassieke industriële robot 6 Degree of Freedom (DoF), bijvoorbeeld de Comau Smart NJ 16-3.1
Voor de meeste moderne 6 DoF-robots geldt het volgende:
- Elk gewricht is fysiek onafhankelijk.
- Elk gewricht kan onafhankelijk worden bestuurd zonder andere gewrichten te beïnvloeden.
- De motor voor elk gewricht bevindt zich op het gewricht zelf.
Voor de meeste 6 DoF-robots is er geen askoppeling. Dit maakt de controle heel eenvoudig:als u een gewricht (bijvoorbeeld gewricht 3) een stuk verplaatst, zal alleen dat gewricht bewegen.
Askoppeling:sommige robots
Laten we eens kijken naar een robot met askoppeling:de Comau Smart5 NJ-165-3.0
Comau produceert meerdere robots met askoppeling. Dit is een van de 6 DoF-robotmodellen met askoppeling. Alle palletiseerrobots van Comau hebben deze functie ook.
Het volgende geldt voor deze robot:
- De motoren voor Gewrichten 2 en 3 bevinden zich beide aan de onderkant van de robot.
- Gewricht 3 wordt bewogen door een parallel verbindingsmechanisme dat de twee verbindingen fysiek met elkaar verbindt.
- Als Joint 2 wordt verplaatst, beweegt Joint 3 ook, en vice versa.
Dit heeft een lichte invloed op de besturing en programmering van deze robots. Gewoonlijk programmeer je een 6 DoF-robot door 6 waarden te verzenden, die elk overeenkomen met de gewenste positie van de 6 gewrichten. Bij askoppeling wordt dit moeilijker omdat twee gewrichten van de robot afhankelijk zijn.
Het grote voordeel van askoppeling:hoog laadvermogen
Als askoppeling zo problematisch is, waarom zou je het dan überhaupt gebruiken?
Er is één groot voordeel van het gebruik van asgekoppelde robots ten opzichte van traditionele 6 DoF-robots in sommige situaties:hoog laadvermogen.
Laten we de Comau NJ-165 (as gekoppeld) en NJ-16 (traditioneel 6 DoF) als voorbeelden nemen:
| Slimme NJ-1-3.1 | Smart 5 NJ-165-3.0 | |
| Type | Traditioneel 6 DoF | As gekoppeld 6 DoF |
| Bereik | 3,11 m | 3,00 m |
| Herhaalbaarheid | 0,1 mm | 0,1 mm |
| Nuttige lading | 16 kg | 165 kg |
| Gewicht | 680 kg | 1240 kg |
Zoals je kunt zien, lijken deze twee robots erg op elkaar in hun bereik en herhaalbaarheid. Als het echter om laadvermogen gaat, zijn ze heel verschillend.
De robot met askoppeling heeft meer dan 10x het laadvermogen van de traditionele 6 DoF-robot!
Dit heeft veel zin. Een groot deel van het laadvermogen van een robot komt van de motoren in Joints 2 en 3. Gewoonlijk moet de motor bij Joint 2 ook het zware gewicht van de krachtige Joint 3-motor dragen. Door deze motor aan de basis van de robot toe te voegen, kan Comau de structuur groter en sterker maken zonder dat er een overdreven krachtige motor nodig is bij Joint 2.
Welk type robots gebruiken askoppeling?
Er zijn drie hoofdtypen robots die askoppeling gebruiken:
- Palletiseerrobots — Veel palletiseerrobots hebben askoppeling omdat ze hierdoor een hoger laadvermogen kunnen hebben.
- Hoog laadvermogen 6 DoF-robots — De robots met het hoogste laadvermogen van Comau, Fanuc en ABB hebben allemaal een askoppeling om ze te helpen hogere nuttige lasten te heffen. Sommige (bijv. de KUKA IRB 8700-800/3.50 met 800 kg laadvermogen) hebben zelfs een contragewicht bevestigd aan de parallelle hefinrichting om zware lasten te compenseren.
- Dunne robots — Een paar dunne robots gebruiken askoppeling om rekening te houden met hun dunne structuur.
Hoe weet u of uw robot askoppeling heeft
Het is niet altijd gemakkelijk om te bepalen of uw robot askoppeling gebruikt... tenzij u RoboDK gebruikt.
Voor zover wij weten, is RoboDK de enige merkonafhankelijke software die de askoppeling nauwkeurig kan verklaren.
U kunt op 2 manieren zien of uw robot askoppeling heeft in RoboDK:
- Verplaats gewricht 2 of 3 in het robotpaneel en kijk of het andere gewricht beweegt.
- Dubbelklik op een gezamenlijke grenswaarde van Verbinding 2 of 3 om het askoppelingstoewijzingsvenster te openen (interactie van As 2 versus As 3).
Bij sommige robots is het gemakkelijk te zien dat een robot een askoppeling heeft, omdat je de parallelle koppeling kunt zien lopen van de basis van de robot tot aan Joint 3. Ook is er geen motor bevestigd aan Joint 3, deze bevindt zich ook in de basis.
Sommige robots hebben ook een versnellingsbakkoppeling tussen gewrichten 5 en 6.
Enkele specifieke aanwijzingen voor het robotmerk
Uit onze ervaringen met het gebruik van robots, volgen hier een paar tips over 3 robotmerken:
- FANUC gebruikt askoppeling op alle modellen, zelfs die zonder fysieke koppeling waarbij de koppeling in software wordt toegepast.
- ABB biedt ook gedetailleerde kaarten op sommige robots met askoppeling.
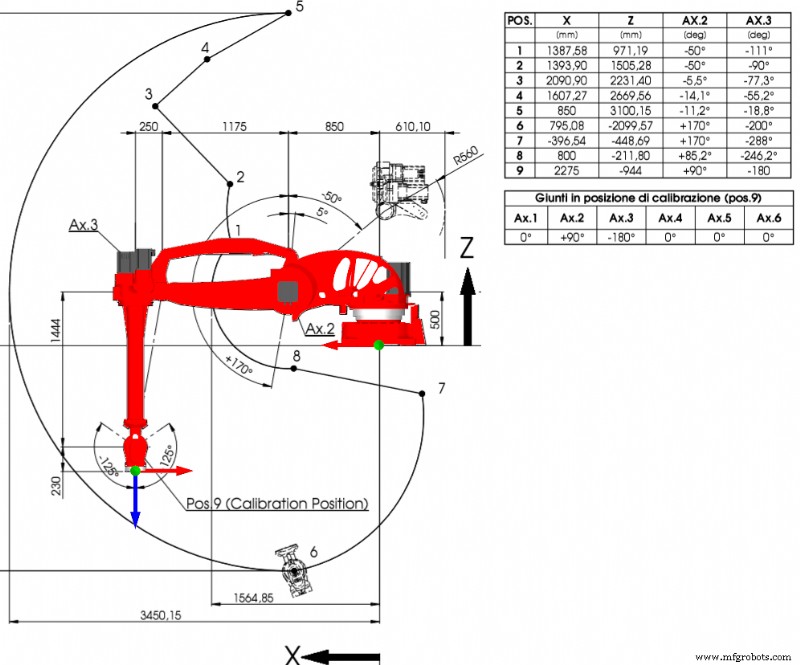
- Comau biedt een gedetailleerde afbeelding van hun askoppeling op alle datasheets van de robot. Zie bijvoorbeeld de gezamenlijke kaartlimieten (as 2 en 3) voor verschillende posities van de robot op deze datasheet. Sommige van hun robots hebben ook een "dode zone" waar een gewricht wordt beperkt door askoppeling. De beschreven werkruimte maakt het mogelijk om de interacties nauwkeurig te modelleren en weer te geven als een Joint 2 vs. Joint 3 grafiek.
Open dus uw robotmodel in RoboDK en probeer het eens om erachter te komen of het een askoppeling heeft.
Als dat zo is, weet dan dat RoboDK het allemaal voor u zal regelen en dat askoppeling uw programmering niet zal verknoeien!
Industriële robot
- Waarom je moet stoppen met het programmeren van je robots
- Wat een autonome robot wel en niet kan
- 5 manieren waarop uw onderhoudsteam de productie-efficiëntie kan verhogen
- Overwegingen bij automatisering:moet u uw productie automatiseren?
- Gantry Robot:automatiseer uw grootste applicaties
- Zal je schoonmaakrobot in de vijver belanden?
- Whitepaper:Hoe u uw robotpotentieel kunt vinden
- Het belang van robotveiligheid op uw fabrieksvloer
- 6 stappen naar een succesvolle industriële robotintegratie in uw faciliteit
- Productietrends die uw productielijn ten goede kunnen komen
- Geautomatiseerde productie van olie-boorkoppelingen