


Wat is een postprocessoreditor en hoe gebruik je er een?
U gebruikt een gesimuleerde robot of CNC-machine... maar deze werkt niet correct. Is het misschien tijd om een postprocessor-editor te gebruiken?
Wat doet een postprocessor en waarom zou je er een willen bewerken?
Als u offline programmeren gebruikt, is het zeer waarschijnlijk dat u met een postprocessor hebt gewerkt. Misschien gebruikt u RoboDK om een robot te programmeren voor robotbewerking of een andere robottoepassing. Of misschien gebruikt u een CAD/CAM-systeem dat uw CNC-machines ondersteunt.
Zelfs als je het niet weet, gebruik je een postprocessor wanneer je een dergelijk systeem gebruikt om je fysieke machines te programmeren.
Een postprocessor is de brug tussen de gesimuleerde omgeving en uw fysieke machine. Het zet de gesimuleerde instructies om in code die de robot kan gebruiken.
Maar wat als u hoe wilt veranderen? genereert het programma deze code? Dat is waar een postprocessor-editor van pas komt...
Waarom zou je een postprocessor moeten bewerken?
De meeste mensen zullen hun postprocessor nooit hoeven te bewerken.
Als u bijvoorbeeld RoboDK gebruikt, downloadt u gewoon uw robotmodel uit onze uitgebreide Robotbibliotheek. Elk model hebben we al gekoppeld aan een van de 80+ postprocessors binnen RoboDK. Telkens wanneer u uw gesimuleerde programma naar de fysieke robot stuurt, converteert de postprocessor de code voor u "onder de motorkap".
Er zijn echter situaties waarin u uw postprocessor moet bewerken.
Elke robotfabrikant gebruikt zijn eigen programmeertaal, die op zijn eigen robotcontroller draait. Elke controller heeft een reeks verschillende configuratie-opties en functies. In de postprocessor kunt u al deze aangepaste configuratie-opties instellen.

De robotcontrollers van Techman bevatten bijvoorbeeld een beveiligingsoptie om de gebruiker om een wachtwoord te vragen voordat ze de robot kunnen herprogrammeren. In de postprocessor vindt u de opties om dit wachtwoord in, uit en in te stellen. Niet alle robots hebben deze optie.
Wat is een postprocessor-editor?
Een postprocessor-editor is speciale software die wordt gebruikt om robot- of CNC-postprocessorbestanden te bewerken. Dit maakt het bewerken via de postprocessor intuïtiever dan met een standaard teksteditor, wat de enige optie is voor veel programmeersystemen.
Een voorbeeld van dergelijke software is de postprocessor-editor die is opgenomen in RoboDK.
RoboDK-postprocessors zijn geschreven in de programmeertaal Python. Voor elk van de ondersteunde postprocessors is er een gecompileerde bibliotheek (een PYC-bestand) en een bewerkbaar Python-script dat alle configuratie-eigenschappen bevat.
Deze configuratiebestanden kunnen met elke standaard teksteditor worden bewerkt als u volledige controle over de configuratie wilt. RoboDK biedt echter ook een meer intuïtieve postprocessor-editor. Hierdoor kunt u de parameters van de door u gekozen robot wijzigen zonder dat u zich met de code hoeft te bemoeien.
Een postprocessor op de gemakkelijke manier bewerken
In RoboDK is de eenvoudigste manier om uw postprocessor te bewerken, onze postprocessoreditor te gebruiken. Het geeft informatie over wanneer u het meest waarschijnlijk elk van de parameters en aanbevolen waarden zult gebruiken. Met deze tool dekt u de overgrote meerderheid van de gebruiksscenario's voor uw robot.
Elke postprocessor bevat een lijst met configuratie-eigenschappen. Deze zijn afhankelijk van uw robotfabrikant.
Sommige postprocessors hebben zeer weinig eigenschappen. De postprocessor voor Mecademic-robots bevat bijvoorbeeld slechts één eigenschap (het bestandstype van het programmabestand).
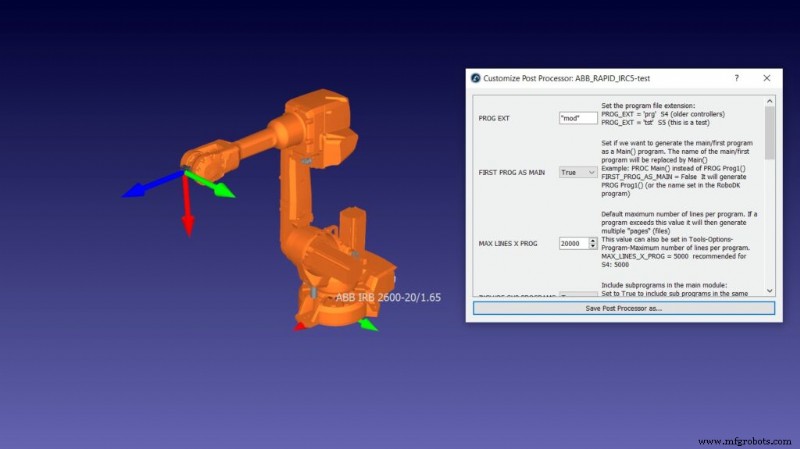
Andere postprocessors bevatten veel eigenschappen. De ABB_RAPID_IRC5-postprocessor voor ABB-robots heeft bijvoorbeeld 16 eigenschappen, variërend van de standaardsnelheid van de robot tot configuratievlaggen voor externe draaitafels.
Welke robot u ook gebruikt, de eenvoudigste manier om de postprocessor te bewerken, is door deze in de RoboDK-editor te laden. U kunt alle beschikbare configuratie-eigenschappen zien en beslissen welke het meest geschikt zijn voor uw toepassing.
De eenvoudige bewerkingshandleiding voor de postprocessor
Wanneer u de postprocessor-editor opent, wordt u begroet door een lijst met beschikbare eigenschappen.
Hoe bepaal je welke eigenschappen je moet aanpassen en welke waarden je moet instellen?
Laten we een specifiek voorbeeld gebruiken om het proces te laten zien... We zullen kijken naar de AUBO-postprocessor voor de collaboratieve robotreeks van het bedrijf.
De AUBO postprocessor bevat de volgende eigenschappen:
- PROG EXT — Dit is de programma-extensie en wordt in veel postprocessors meegeleverd. Het specificeert het bestandstype dat RoboDK zal genereren.
- SPEED MS en SPEED RAD — Dit specificeert de snelheid in meters per seconde en radialen voor cirkelvormige bewegingen.
- ACCEL MSS en ACCEL RADSS — Dit specificeert de versnelling van de robot in meters per seconde kwadraat of radialen per seconde kwadraat voor cirkelvormige versnellingen.
Zoals u kunt zien, zijn de eigenschappen vaak duidelijk door hun naamgevingsconventies. Als het doel van een eigenschap echter niet meteen duidelijk is, staat er meestal een beschrijving van in de editor en vaak ook aanbevolen waarden.
Als u het doel van een bepaalde eigenschap nog steeds niet kunt achterhalen, kunt u mogelijk informatie vinden in de handleiding van uw robot of u kunt een vraag stellen op het RoboDK-forum.
Waar kan ik de nieuwe RoboDK Post Processor Editor vinden
Begonnen met het bewerken van de postprocessor van uw robot met de RoboDK-editor!
U kunt informatie vinden over het activeren en gebruiken van de editor op onze documentatiepagina.
Vragen? Vertel het ons in de reacties hieronder of neem deel aan de discussie op LinkedIn, Twitter, Facebook, Instagram of in het RoboDK-forum.. Bekijk ook onze uitgebreide videocollectie en abonneer je op het RoboDK YouTube-kanaal
Industriële robot
- Decoderen van software voor preventief onderhoud:wat het doet en hoe het te gebruiken
- Inbedrijfstelling op afstand:waarom je het nodig hebt en hoe je het gebruikt
- Totale effectieve prestaties van apparatuur:wat is TEEP en hoe u het kunt gebruiken om de planning te verbeteren
- P-F Curve:wat het is en hoe het te gebruiken bij onderhoud
- Wat is een IoT-platform? (En hoe je er een kunt kiezen)
- Wat is een drukval en hoe voorkom je het?
- Wat is een compactor en hoe kies ik de juiste?
- Industriële koppelingen:wat zijn het en hoe gebruik je ze?
- PIC18 Microcontroller:wat het is en hoe het te gebruiken?
- Wat is een Ironworker-machine en waarom heb je er een nodig?
- Wat is een referentie-aanduiding en hoe gebruiken we deze bij assemblage?