


Singulariteit van robotica:wat het is in robotarmen

Bron:www. idtechex.com
Het gebruik van robotarmen in de maakindustrie neemt toe en steeds meer bedrijven profiteren van de voordelen van het gebruik van robotarmen. Als u robotarmen in uw bedrijfsprocessen wilt opnemen, moet u ervoor zorgen dat u goed geïnformeerd bent. Zoek naar een fabrikant van hoogwaardige robotarmen waarmee u kunt werken voor kwaliteitsresultaten.
De robotarm is voorzien van het lichaam, de pols en ook de eindeffector. De eindeffector is wat wordt gebruikt om verschillende producten vast te houden of verschillende taken op zich te nemen. In de meeste gevallen heeft u de eindeffector nodig om met precisie in verschillende richtingen te bewegen. Dit is waar u ervoor moet zorgen dat u zich bewust bent van de singulariteit van de robot en hoe deze de prestaties van uw robotarm beïnvloedt. In dit artikel gaan we dieper in op de singulariteit van de robot en waarom het essentieel is om dit in gedachten te houden.
Inhoudsopgave
Wat is Robot Singularity

Bron:www. technologyreview.com
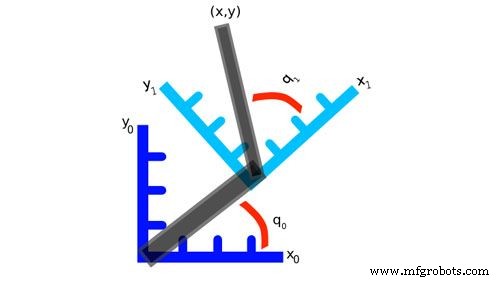
Robot-singulariteit verwijst naar een configuratie waarbij de beweging van de robot-eindeffector in bepaalde richtingen wordt geblokkeerd. Deze configuratie leidt tot een limiet aan de efficiëntie en precisie van de robotarm waarmee u werkt. Over het algemeen werken 6-assige robotarmen door in bewegingen te bewegen ten opzichte van de X-, Y- en Z-assen in een 3D- of Cartesiaans vlak. Het bestaat uit 6 gewrichten die bijdragen aan de 6 vrijheidsgraden die de robotarm ervaart terwijl hij in actie is.
Door deze mate van vrijheid kan de robotarm in verschillende richtingen bewegen en gemakkelijk de taken uitvoeren waarvoor hij is ontworpen. Als de robot-eindeffector toevallig niet bij de producten kan komen of in de verkeerde richting beweegt, komt hier het singulariteitsprobleem om de hoek kijken. Sommige singulariteiten zijn vrij eenvoudig te identificeren en op te lossen, zodat u terug kunt gaan naar uw taken. Aan de andere kant zullen sommige robots singulariteiten ervaren die moeilijker te identificeren zijn, tenzij met behulp van complexe en lange formules.
Wat beïnvloedt de singulariteit van robots?
Bron:www. mecademic.com
Robot-singulariteit zal verschillende effecten hebben en ook uitdagingen, vooral bij het identificeren van de specifieke problemen. Deze uitdagingen variëren, afhankelijk van een aantal factoren op de robotarm waarmee u gaat werken. De complexiteit en ernst van de singulariteit die uw robot ervaart, is afhankelijk van het aantal gewrichten, het type robot (lineair of roterend) en de geometrische opstelling.
Een industriële robotarm heeft twee ruimtes waar hij eenvoudig kan worden bestuurd. Dit is meestal de gezamenlijke ruimte en de cartesische ruimte. Met de verschillende ruimtes waar de robotarm werkt, zult u zien dat deze twee sets bewegingsopdrachten in de positiemodus zal bevatten.
Als het gaat om de gewrichtsruimte-opdrachten, krijgt de robot specifieke instructies met de gewenste set gewrichtsruimten. Het zal dan bewegen om elk gewricht in een lineaire en gelijktijdige vertaling naar de voorgestelde gewrichtspositionering te brengen. Met de cartesische ruimtecommando's zal de suggestie aan de robot de gewenste pose bevatten voor de eindeffector met een specifiek cartesiaans pad. Het cartesiaanse pad is ontworpen om lineair of circulair te zijn.
Om de robot nauwkeurig uit te lijnen met het cartesiaanse gewricht en de commando's, berekent de robotcontroller de inverse positie en snelheidskinematica van de robot. Dit resulteert in de juiste positionering van de eindeffector om de ontworpen taak uit te voeren. Als de berekeningen echter fout zijn, treden de singulariteiten op waar u merkt dat de eindeffector niet nauwkeurig is gepositioneerd. Dit toont u de configuraties die u wilt vermijden om te voorkomen dat de singulariteitsproblemen uw automatiseringsprocessen belemmeren.
Functies van Robot Singularity

Bron:www. dignited.com
Toegekende robot-singulariteiten moeten koste wat kost worden vermeden om ervoor te zorgen dat uw industriële robotarm optimaal kan werken aan de gewenste taken. Als u meer te weten komt over de functie van de robot-singulariteit, krijgt u een beter begrip van waarom u zou moeten proberen deze te vermijden. De singulariteit van robots wordt voornamelijk geassocieerd met twee verschillende functies.
De achteruitgang in snelheidstoewijzing
Bron:studywolf. wordpress.com
Beschouw twee cartesiaanse robots die worden gebruikt om hun eindeffectoren in verschillende richtingen te oriënteren. De twee robots hebben een zesassige positionering met stapels van drie orthogonale lineaire geleidingen en drie rotatietrappen. Wanneer de gebruikte robot de assen en verbindingen kan houden waar ze bedoeld zijn, dan is de oriëntatie van de eindeffector eenvoudig.
Het kan de eindeffector continu gebruiken langs het 6D-pad binnen zijn werkruimte met behoud van precisie en nauwkeurigheid. Wanneer de assen en de gewrichten echter samenvallen, treedt er een singulariteit op en kan de robot niet meer bewegen met de 6 vrijheidsgraden die hij tot zijn beschikking heeft.
Bij deze robot merk je dat hij zijn eindeffector niet kan roteren om de assen die samenvallen met de draaiende gewrichten. Dit soort singulariteit wordt vaak het cardanische slot genoemd. Aangezien de meeste singulariteiten worden opgelost met behulp van vergelijkingen, merk je dat het moeilijker wordt om de snelheid van bepaalde cartesische vectoren te bepalen. Wanneer de singulariteit optreedt, belemmert dit je vermogen om de intensiteit in getallen te berekenen die verband houden met de snelheden die worden weergegeven.
Het kunnen meten van de snelheden van een robotarm is essentieel om ervoor te zorgen dat u de veiligheid in acht neemt. Als je met een singulariteitsprobleem wordt geconfronteerd, merk je dat het een groot risico vormt voor robotica, ook al zijn ze dat nog niet. Het resulteert in hoge gewrichtssnelheden die gevaarlijk kunnen zijn, vooral als u met grote en snelle industriële robots werkt. Daarom is het zo belangrijk om de snelheden waarmee je werkt in kaart te brengen.
Beperkte interne werkruimtegrenzen
Bron:Youtube
Als het gaat om robot-singulariteit, heeft dit niet alleen invloed op de kinematica van de inverse snelheid, maar druppelt het ook door naar de kinematische vergelijkingen van de inverse positie. Als je met industriële robots werkt, zul je merken dat ze vergelijkingen en oplossingen bevatten voor verschillende gewrichtsposities. De verschillende aangeboden oplossingen zijn nauw verbonden met de verschillende configuratietypes.
Als uw robot bijvoorbeeld 8 unieke oplossingen heeft voor gewrichtsposities tot de eindeffectorpositie, zal hij ook 8 verschillende configuratietypes hebben. Om een configuratietype te wijzigen, moet u een singulariteit doorlopen. Singulariteiten zijn de grenzen die worden gevonden tussen de 6D-entiteiten in de cartesiaanse werkruimte is een typische 6-assige robot. Dit beperkt de verschillende configuraties die u kunt bereiken en de werkruimtegrenzen die beschikbaar zijn voor uw industriële robot.
Soorten robot-singulariteit in een verticaal gelede robot

Bron:blog. grabcad.com
Aangezien robot-singulariteiten kunnen voorkomen in elke industriële robotarm waarmee u werkt, is het belangrijk om te beseffen dat er verschillende typen zijn. Net zoals de robotarm in verschillende delen wordt geleverd, zullen de singulariteiten ook van invloed zijn op deze verschillende delen, wat resulteert in een verscheidenheid aan problemen.
Hier is het belangrijk om rekening te houden met de verschillende assen van gewrichten in industriële robotarmen. Je gaat werken met 2 en 3 die evenwijdig zijn, 1 en 4 die normaal staan op 2 en 3, de as van gewricht 5 die loodrecht staat op de assen van 4 en 6. Nu je een beter begrip hebt van de verschillende assen en gewrichten bent u op een betere plek om de singulariteitstypes te verkennen. De meest voor de hand liggende soorten singulariteiten in een verticaal gearticuleerde robotarm zijn:
Pols singulariteit
Bron:sites. google.com
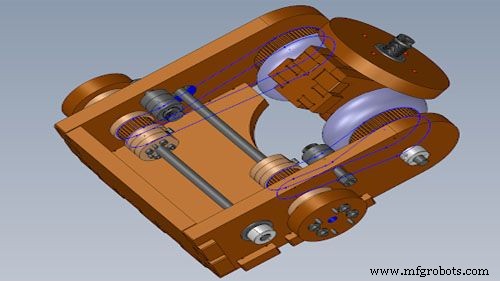
Als het gaat om verticaal gearticuleerde robotarmen met inline polsen, is de singulariteit van de pols het meest voorkomende probleem. Dit type singulariteit treedt op wanneer de assen van gewrichten 4 en 6 met elkaar samenvallen. Wanneer dit gebeurt, is de pols niet in staat om de eindeffector in de richting van de as van gewricht 5 te bewegen. Denk bij toepassing aan een industriële robotarm die nauwkeurig werkt.
Om een lijn door de singulariteit te volgen, moeten de gewrichten 4 en 6 gelijktijdig zijn en 90 graden draaien. Dit zal in tegengestelde richtingen worden gedaan om ervoor te zorgen dat het proces nauwkeurig is. Dit toont aan dat het oversteken van een pols-singulariteit haalbaar is. Als u echter eenmaal bij de singulariteit bent aangekomen, blijft de eindeffector onbeweeglijk terwijl de twee gewrichten roteren. Om de eindeffector de singulariteit te laten passeren, moet deze eerst stoppen. Als het in gebruik was, zou het de nauwkeurigheid van de industriële arm tijdens het werk belemmeren. Er zijn talloze oplossingen voor polssingulariteit die eenvoudig kunnen worden geïmplementeerd om het probleem te verhelpen.
Elleboog singulariteit

Bron:www. electronicsteacher.com
Het tweede type singulariteit dat je kunt tegenkomen bij het werken met verticaal gearticuleerde robotarmen met inline polsen is elleboogsingulariteit. Het komt voornamelijk voor wanneer het polscentrum op het vlak ligt dat door de assen van gewrichten 2 en 3 gaat. Het polscentrum wordt gebruikt om te verwijzen naar het punt waar de assen van gewrichten 4, 5 en 6 elkaar kruisen. In de elleboog-singulariteit zul je zien dat de arm volledig gestrekt is en kan het ook voorkomen dat deze niet volledig kan worden gevouwen. Dit soort singulariteit wordt meestal bepaald door de as en positie van gewricht 3. De elleboogsingulariteit biedt ook een aantal oplossingen die u kunnen helpen bij het oplossen van eventuele prestatieproblemen met uw robotarm. Dit type singulariteit komt vrij vaak voor en kan gemakkelijk worden voorspeld en ook worden vermeden.
Singulariteit van de schouder
Bron:blenderartists. org
De laatste singulariteit die je kunt tegenkomen, is de schoudersingulariteit die optreedt wanneer het midden van de robotpols op de lijn ligt die door de assen van gewrichten 1 en 2 gaat. Deze singulariteit is de meest complexe van de andere, aangezien het niet afhankelijk is van een enkele gezamenlijke positie. Bij de schouder singulariteit wordt de beperking gelegd op de beweging in de richting van de as van gewricht 2.
In de toepassing, om de robot een lijn door de schouder singulariteit te laten volgen, moeten gewrichten 1 en 4 gelijktijdig in een hoek van 90 graden draaien. Deze rotatie zoals in de polssingulariteit wordt in tegengestelde richtingen gedaan terwijl de eindeffector constant blijft. Net als bij de polssingulariteit is de beweging door de schoudersingulariteit mogelijk, maar de eindeffector zal moeten stoppen om dat mogelijk te maken. Deze bijzonderheid biedt ook een aantal oplossingen die kunnen worden geïmplementeerd om ervoor te zorgen dat de robotarm weer optimaal werkt.
Soorten singulariteit in een zesassige collaboratieve robot (cobot)

Bron:www. istockphoto.com
Als het gaat om collaboratieve robots, vind je de assen van gewrichten 2, 3 en 4 die evenwijdig zijn, de as van gewricht 1 snijdt en staat loodrecht op de assen van gewricht 2. Bovendien heeft het ook de as van gewricht 5 die de assen van gewrichten 4 en 6 snijdt en loodrecht staat op de assen van gewrichten 4 en 6. Net als de singulariteiten in de gelede robots, hebben deze robots ook verschillende oplossingen met betrekking tot de verschillende configuratietypes. De soorten singulariteiten die in Cobots zijn opgenomen, zijn onder meer:
Pols singulariteit
De singulariteit van de pols in deze robots treedt op wanneer de assen van gewrichten 4 en 6 evenwijdig worden. In deze situatie kan het zijn dat de assen van gewrichten 2, 3, 4 en 5 kunnen bewegen terwijl de eindeffector constant blijft.
Elleboog singulariteit
In deze robots treedt de elleboogsingulariteit op wanneer de assen van gewrichten 2, 3 en 4 zich in hetzelfde vlak bevinden. Dit beperkt de beweging van de eindeffector aanzienlijk en beïnvloedt op zijn beurt de prestaties van de robotarm.
Singulariteit van de schouder
De schouder singulariteit treedt op wanneer het snijpunt van de assen van gewrichten 5 en 6 in het vlak liggen dat door de assen van gewrichten 1 en 2 gaat. Hier zijn een paar oplossingen die kunnen worden geïmplementeerd om de singulariteit te verhelpen en een werkende industriële robot te hebben.
Singulariteit in robotica vermijden

Bron:www. ennomotive.com
Met de verschillende effecten die robot-singulariteit heeft op de productieprocessen, is het essentieel om manieren te hebben om ze te vermijden. Aangezien er verschillende soorten robots zijn, kunnen singulariteiten variëren afhankelijk van het soort robot waarmee u werkt. Als u een basiskennis heeft van hoe u ze kunt vermijden, zorgt u ervoor dat uw processen gemakkelijk verlopen. Over het algemeen kunnen singulariteiten alleen worden vermeden door ervoor te zorgen dat uw robotcellen goed zijn ontworpen. Dit sijpelt ook door in het ontwerp op de adapterplaat die u kiest om te gebruiken voor uw eindeffector.
Als u bijvoorbeeld uw robotarm configureert en een keuzelocatie slecht toewijst om overeen te komen met een pols-singulariteit, dan kunt u niet veel doen om het probleem op te lossen. Hiermee hoef je alleen maar te controleren of de pose kan worden gebruikt in een niet-opvallende toepassing. Bovendien kunnen singulariteiten ook worden vermeden door kleine hoeken aan de tooling toe te voegen. Dit gaat een lange weg om de kans te verkleinen dat de robot naar een singulariteit gaat. Dit is een techniek die vooral wordt gebruikt door technici die de mechanica begrijpen en de oplossingen in hun voordeel kunnen aanpassen.
Ten slotte kunnen de singulariteiten ook worden vermeden door de programmeeraanpak te volgen en wiskunde je te laten helpen om dingen te regelen. Hierin zul je zien dat het aantal assen sterk wordt verminderd om het mogelijk te maken om de singulariteit te vermijden. Dit vooral omdat een hoger aantal assen de kans op het optreden van singulariteiten vergroot. Onthoud dat singulariteiten optreden wanneer assen op één lijn liggen met elkaar en de beweging van de robotarmen in bepaalde richtingen blokkeren. Het verminderen van het aantal assen verkleint ook de kans dat ze uitlijnen en eventuele blokkades veroorzaken.
Conclusie
Robot-singulariteit is een groot probleem dat wordt ervaren in verschillende industriële toepassingen van robotarmen en andere automatiseringsapparatuur. Het zelf oplossen van deze problemen kan een belemmering blijken te zijn. Daarom moet u proberen de robot-singulariteit te vermijden. Als u dit probleem echter tegenkomt, kunt u een oplossing vinden of een slimme technicus inhuren die het probleem zal oplossen.
U kunt ook een nauwe werkrelatie opbouwen met een gerenommeerde fabrikant van automatiseringsapparatuur die u zal helpen wanneer u enige bijzonderheden tegenkomt. Neem de tijd om ervoor te zorgen dat uw robotapparatuur goed werkt, zodat u het gebruik ervan voor uw bedrijf volledig kunt aanpassen en benutten.
Industriële robot
- Robotwerkenvelop:wat is het?
- Verschillende vrijheidsgraden in robotarmen:een volledige uitleg
- Roboticawapens in productie en hun voordelen
- Wat zijn de voordelen van robotarmen voor mensen?
- Wat is een robotpols:een definitieve gids
- Wat is robotlassen? - Proces en toepassing?
- Wat zijn cobots?
- Visiegestuurde robotica
- Wat is robotlassen? - Proces en toepassing?
- Wat is een drankrobot?
- Is robotslijpen echt de moeite waard?