


Arduino-zelfstudie 04:Motoren
Welkom bij de vierde Arduino-zelfstudie uit onze Arduino-zelfstudieserie. In deze tutorial leren we hoe we DC- en servomotoren kunnen besturen met behulp van PWM (Pulse Width Modulation).
Dit is een stapsgewijze video-tutorial die gemakkelijk te volgen is. Ook kun je onder de video vinden welke onderdelen we nodig hebben voor deze tutorial en de broncodes van de voorbeelden in de video.
Benodigde onderdelen voor het eerste voorbeeld
- DC-motor ………………………………….
- of CPU Fan DC-motor ………………..
- Batterij 9V of adapter (9-12V) ……….
- Arduino-bord ………………………….
- Broodplank en springdraden ..……
- NPN-transistor ………………………..
- Potentiometer …………………………..
- Diode ………………………………………
- condensator – 1uF ………………………………
- Weerstand – 1k O ………………………….
Openbaarmaking:dit zijn gelieerde links. Als Amazon Associate verdien ik met in aanmerking komende aankopen.
Circuitschema van het eerste voorbeeld, dat een gelijkstroommotor bestuurt
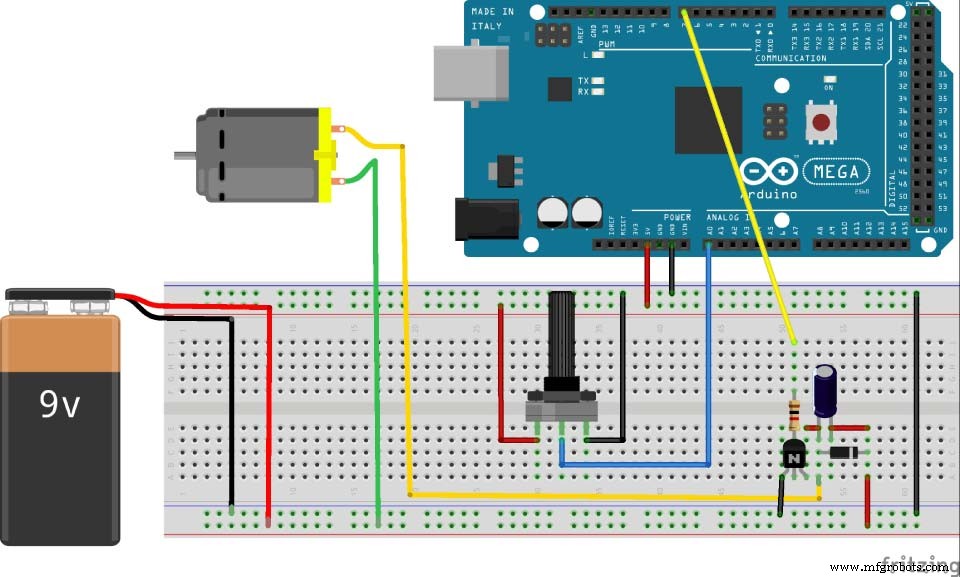
Broncode van het eerste voorbeeld, besturen van een DC-motor
int pwmPin = 7;
void setup() {
Serial.begin(9600);
pinMode( pwmPin, OUTPUT);
}
void loop () {
int potValue = analogRead(A0);
int newpotValue = map(potValue, 0, 1023, 0 , 255);
analogWrite(pwmPin, newpotValue);
}Code language: Arduino (arduino)Onderdelen die nodig zijn voor het tweede voorbeeld, het besturen van een servomotor
- Servomotor
- Potentiometer
Circuitschema van het tweede voorbeeld, dat een servomotor bestuurt
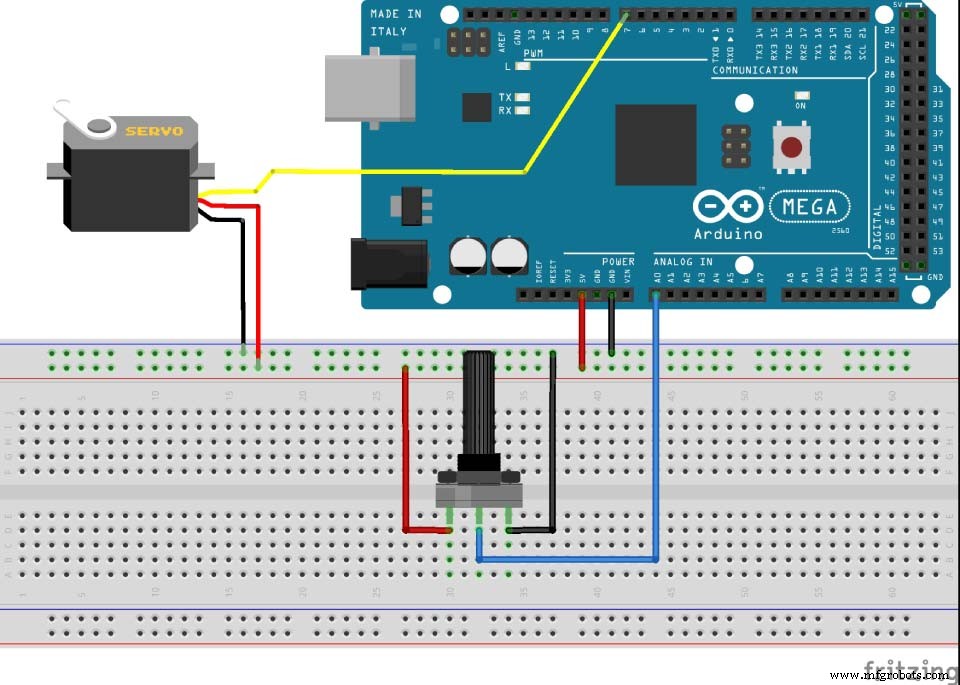
Broncode van het tweede voorbeeld, het besturen van een servomotor
#include <Servo.h>
Servo myServo;
void setup() {
myServo.attach(7);
}
void loop() {
int potValue = analogRead(A0);
int angleValue = map(potValue, 0, 1023, 0, 180);
myServo.write(angleValue);
delay(10);
}Code language: Arduino (arduino)Productieproces