


PID-regeling van robotgrijper in Matlab / Simulink
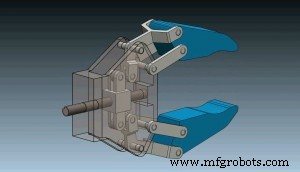
In deze zelfstudie zullen we zien hoe we PID-besturing kunnen maken van een 3D-model van een robotgrijpermechanisme. Het Simulink-model is georganiseerd in twee subsystemen. Een DC Motor-subsysteem dat is gemodelleerd met Simulink-blokken en een 3D-model dat is geïmporteerd uit Solidworks met behulp van de SimMechanics Link. We gebruiken een stapfunctie om de gelijkstroommotor te activeren om de robotgrijper aan te drijven en we gebruiken het Simulink PID-blok om de parameters van de PID automatisch af te stemmen.
Je kunt de volgende video bekijken of de schriftelijke tutorial hieronder lezen.
Download hier het Simulink-model uit het voorbeeld:

Simulink-model - PID-regeling
1 bestand(en) 538,71 KB downloadenZoek en download het 3D-model van het robotgrijpermechanisme via de volgende link:
Productieproces
- De toekomst van robotica
- Birth Control Pil
- Modeltrein
- Industriële robot
- Tutorial – sPiRobot:Bedien en zie wat uw robot overal ziet
- Recycle sorteerrobot met Google Coral
- MATLAB - Simulink
- Ioed gebruiken om een robotarm op afstand te bedienen
- Basisprincipes van PID-regeling en lusafstemming
- PID-regeling van robotgrijper in Matlab / Simulink
- Solidworks en Matlab / Simulink simulatie