


Bluetooth-gestuurde pick-and-place-robot
Componenten en benodigdheden
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
Benodigde gereedschappen en machines
 |
|
Apps en online services
 |
| |||
 |
|
Over dit project
Inleiding
Deze tutorial laat zien hoe je een pick-and-place-robot kunt bouwen die wordt bestuurd met je Android-smartphone. We hebben een mobiele app gebouwd met behulp van het MIT App Inventor-platform. In deze tutorial zullen we elk onderdeel van dit project afzonderlijk bespreken. We zullen het hebben over:
- 1 Een servomotor besturen
- 2 Een gelijkstroommotor besturen
- 3 De Bluetooth-module gebruiken
- 4 Hoe u uw robot bestuurt met uw mobiele telefoon
Dus ik hoop dat deze tutorial al je behoeften dekt om je bot te bouwen.
Het scenario
Allereerst moeten we weten hoe de robot bestellingen opneemt. We gebruiken een Bluetooth-module die wordt verbonden met een mobiele app, die we daarna zullen bouwen. Voor nu moeten we weten dat we onze opdracht naar de robot zullen sturen met onze mobiel via de Bluetooth-verbinding.

Hardware
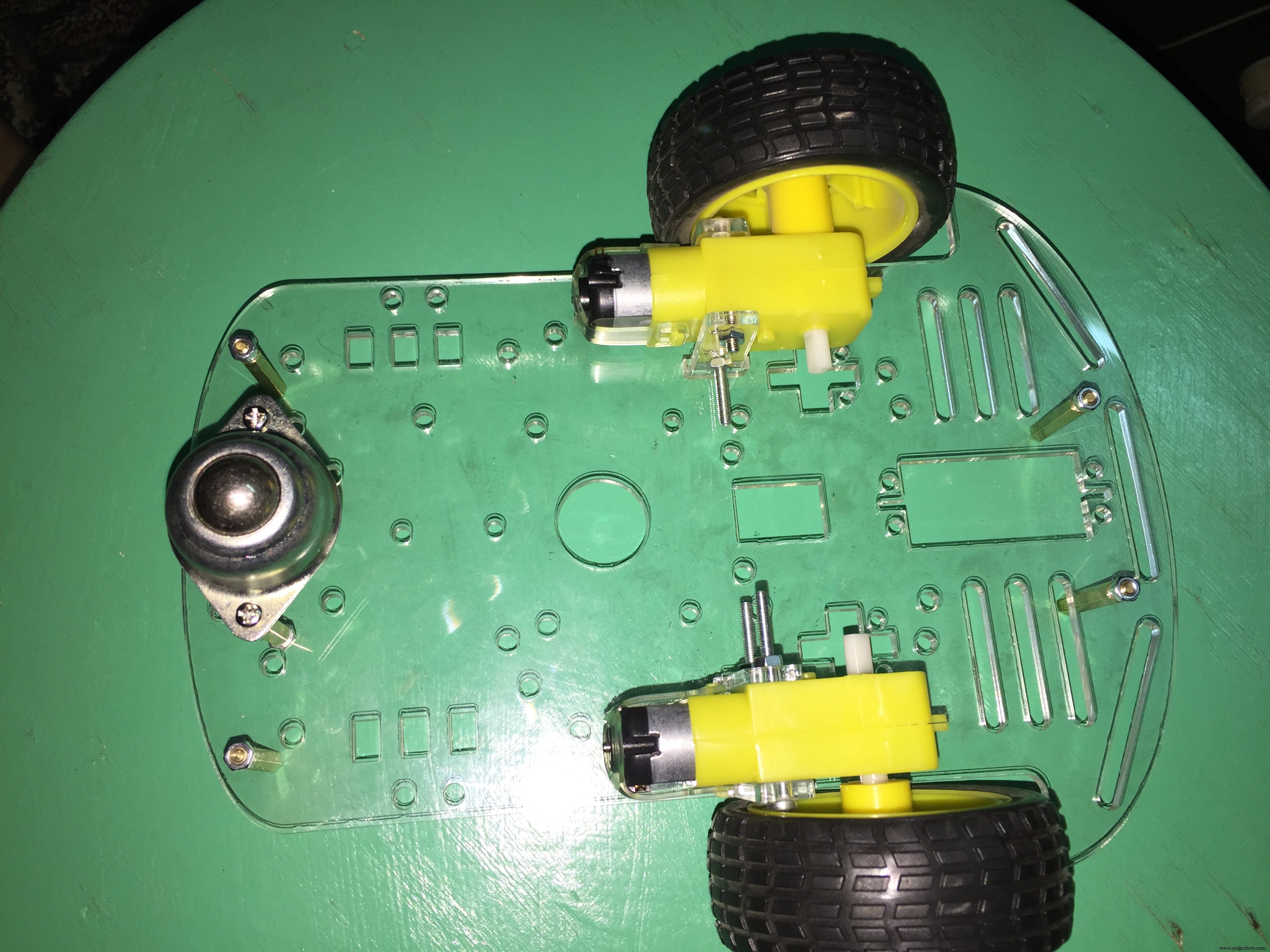
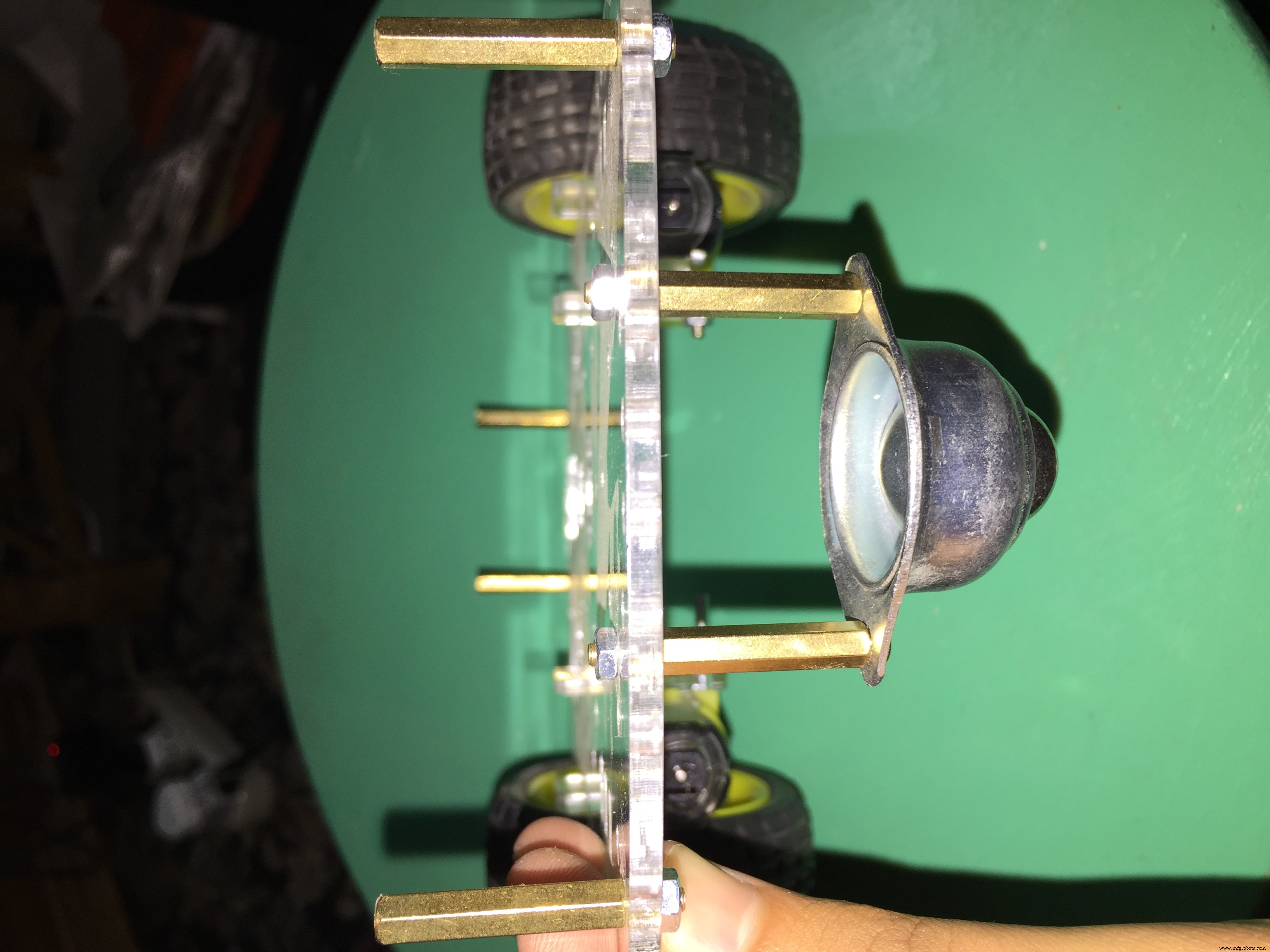
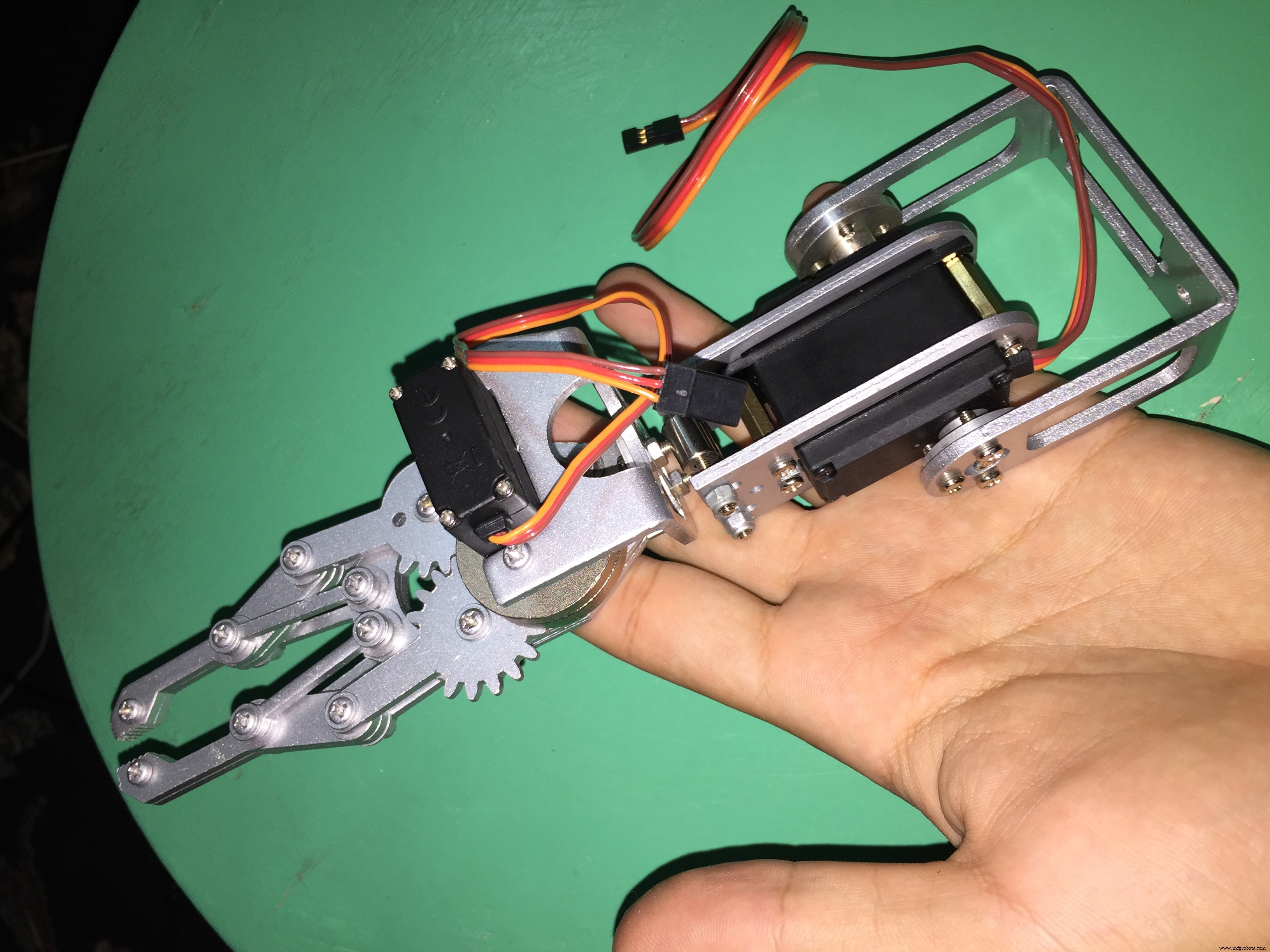
- De kit vereist wat eenvoudige montage, maar het kost wel wat tijd. Volg de instructies die bij uw set zijn geleverd voor montage,
Aan het einde van de assembly zou het er zo uit moeten zien:
Met het Motor Shield kunt u met uw motoren praten. Als je de motoren rechtstreeks op het Arduino-bord aansluit, zal er een vuur ontstaan! omdat elke motor minimaal 80MA nodig heeft, maar de maximale stroom die de digitale Arduino-pin kan leveren is 40MA, dus NIET probeer de motor rechtstreeks op je Arduino-bord aan te sluiten.
- Het motorschild helpt u de richting van uw motor te regelen (bijv. VOORUIT, ACHTERUIT en LOSLATEN).
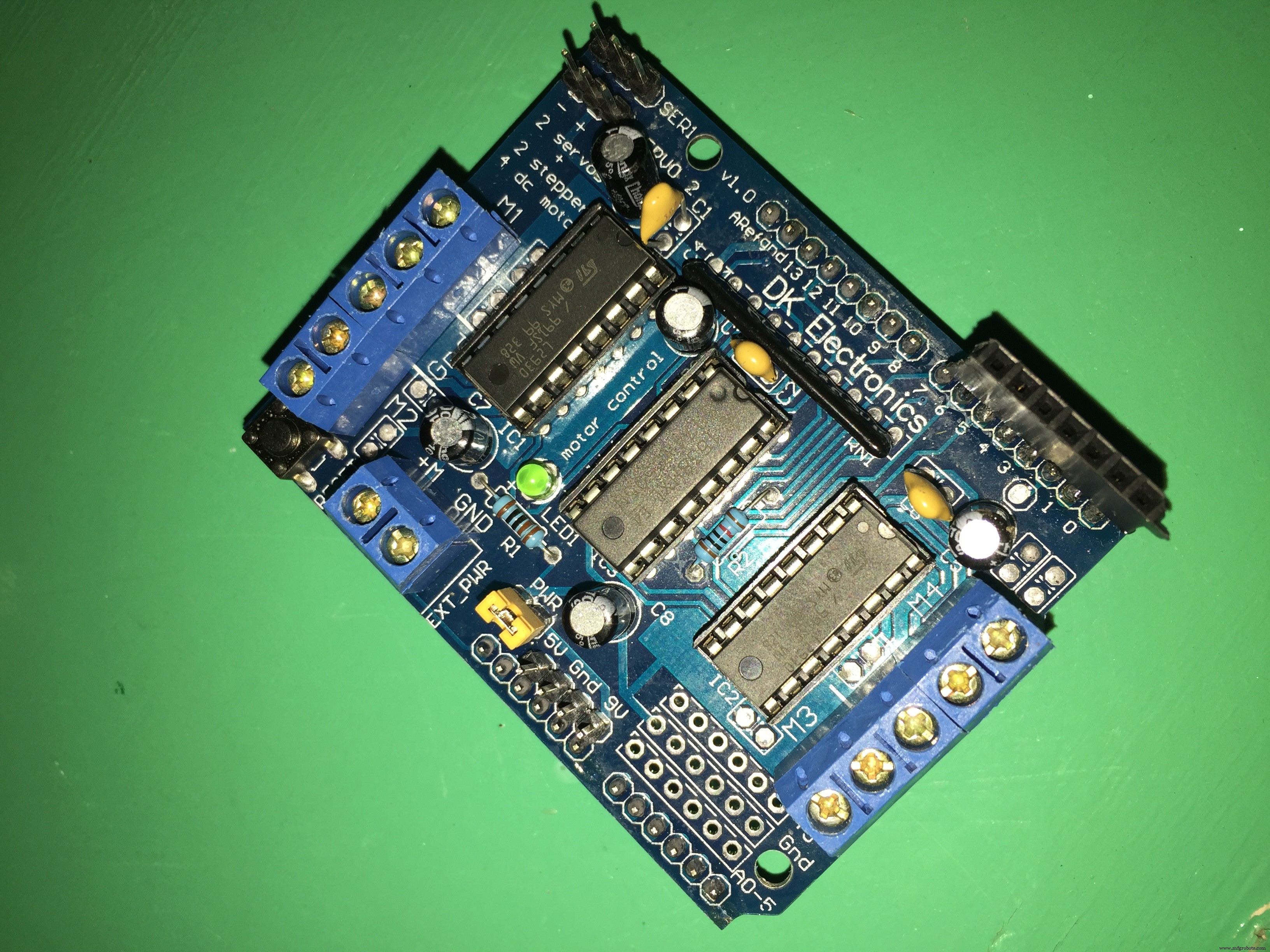
- Het motorschild stelt u in staat om tot 4 bidirectionele DC . te bedienen motoren met individuele 8-bits snelheidsselectie (dus ongeveer 0,5% resolutie).
Je kunt enkele pin-headers op de bovenkant van het schild solderen om de Arduino-pinnen te kunnen gebruiken.
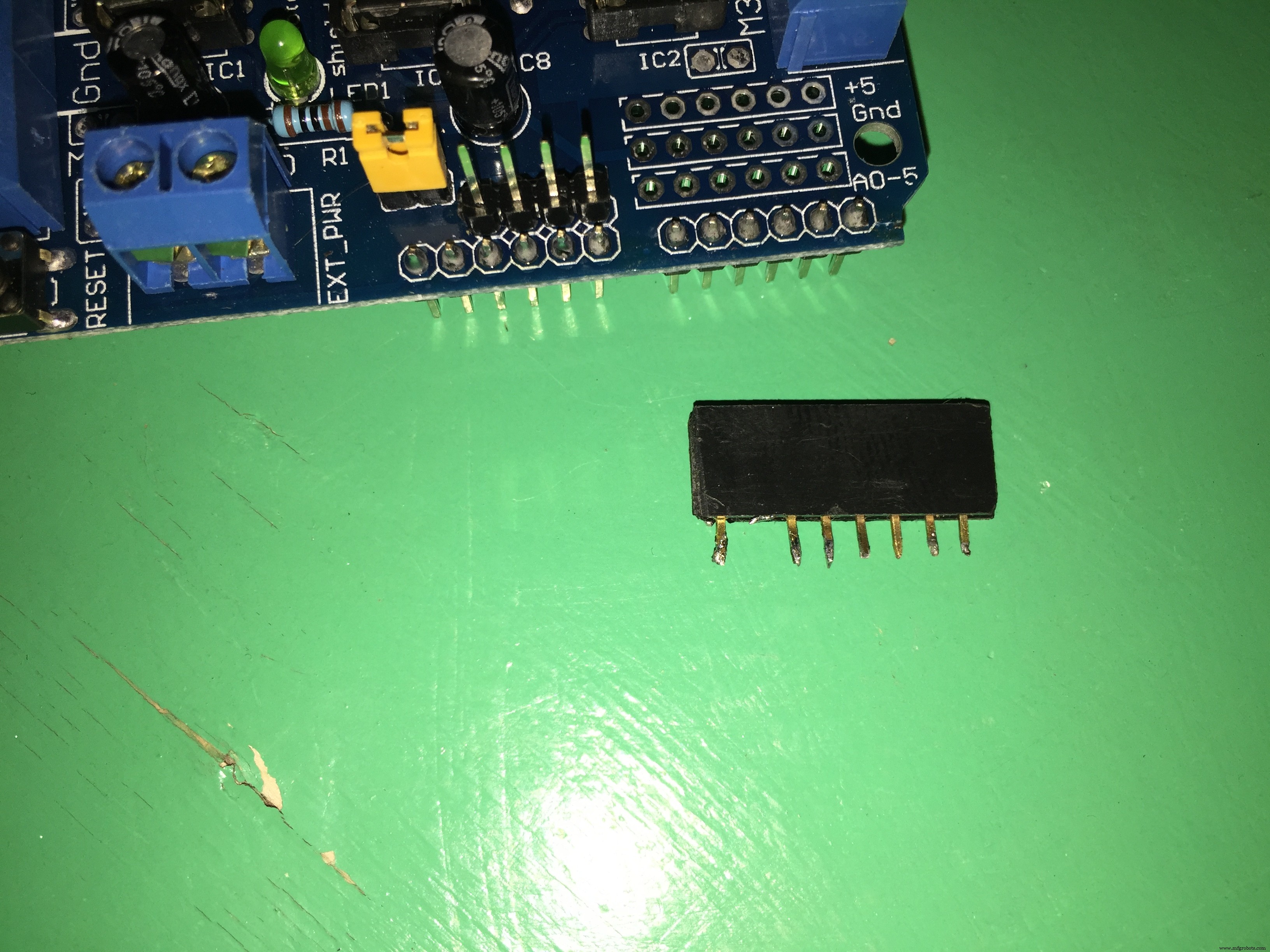

Je moet je motorschild als volgt boven je Arduino-bord plakken:
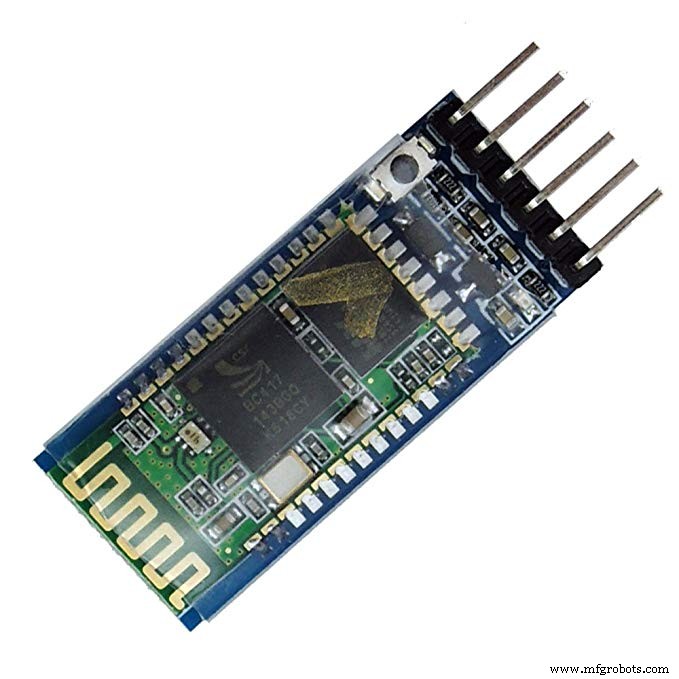
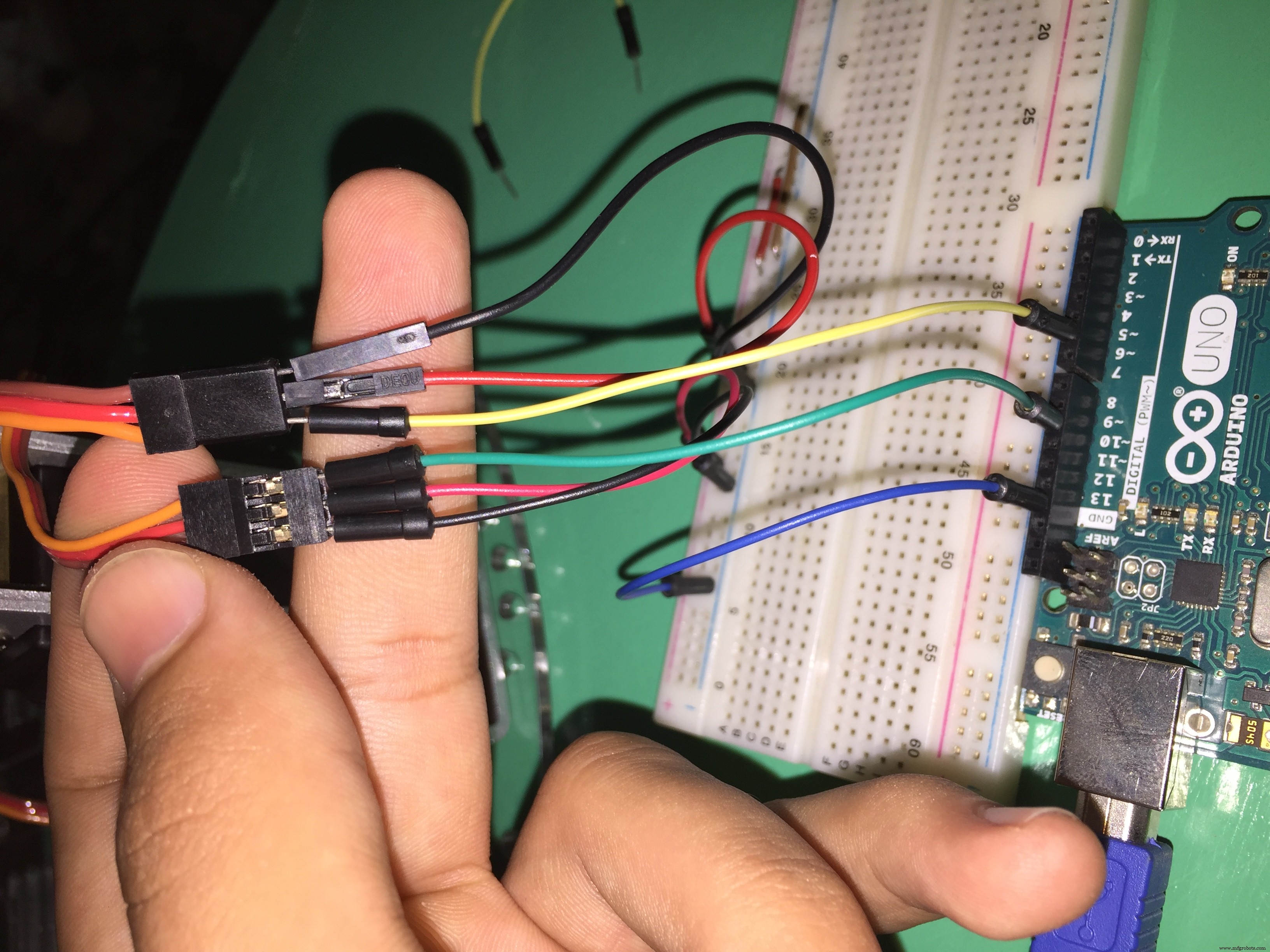
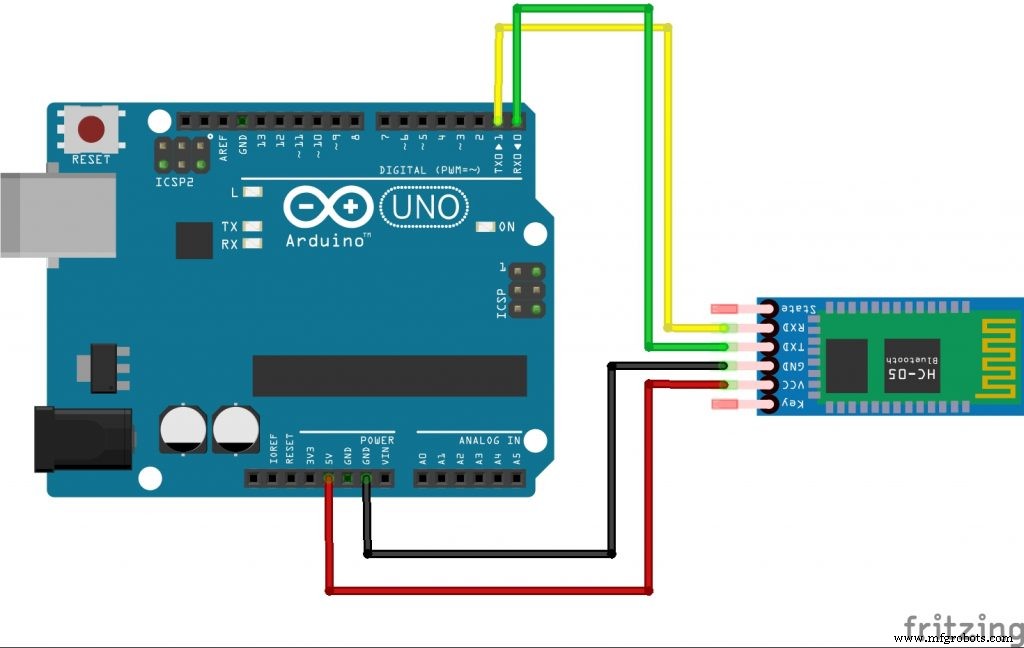
De Bluetooth-module :het is het kanaal tussen de piloot en de robot om orders te verzenden en acties te ondernemen.
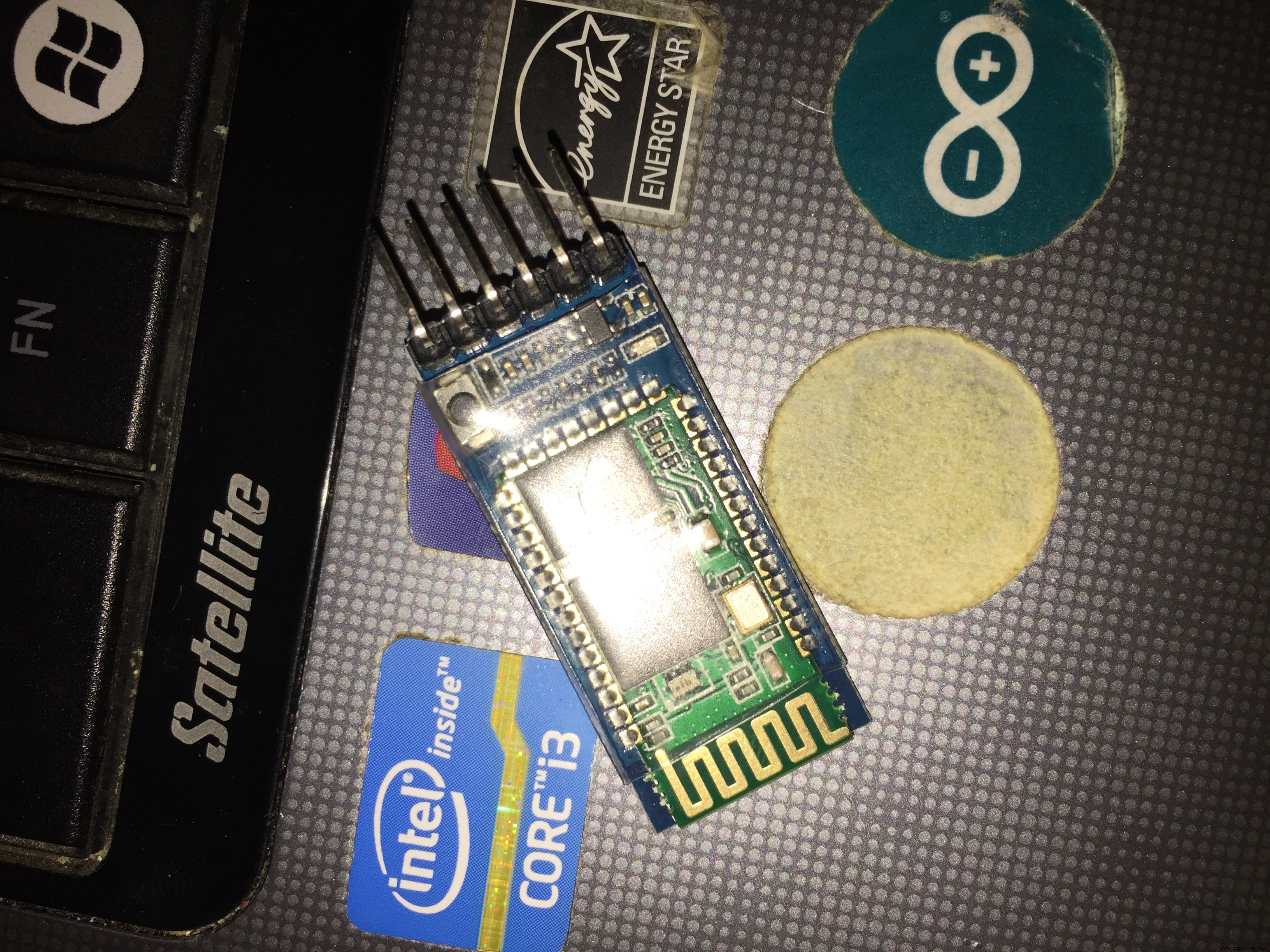
Het heeft 6 pinnen; we zullen alleen de middelste vier pinnen gebruiken (RX-TX-GND-+5):

We zullen verbinden:
- +5 op de Bluetooth-module naar de 5v op de Arduino
- GND op de Bluetooth-module naar de GND op de Arduino
- Rx op de Bluetooth-module naar de Tx op de Arduino
- Tx op de Bluetooth-module naar de Rx op de Arduino

OPMERKING:WAAROM Rx naar Tx en Tx naar Rx?
Omdat de Bluetooth-module gegevens (Tx) verzendt en de Arduino deze gegevens ontvangt (Rx).
De ene verzendt en de andere ontvangt
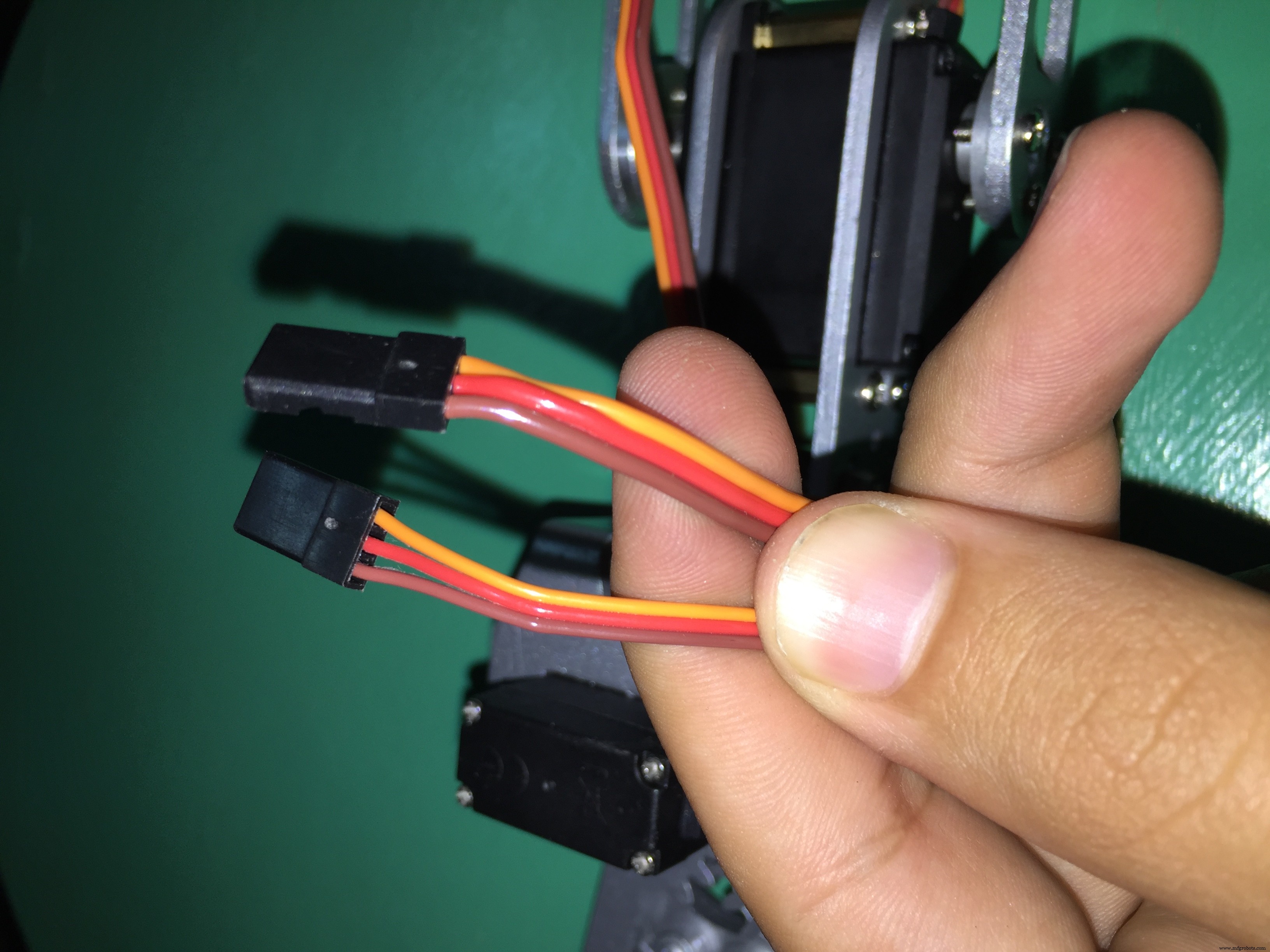
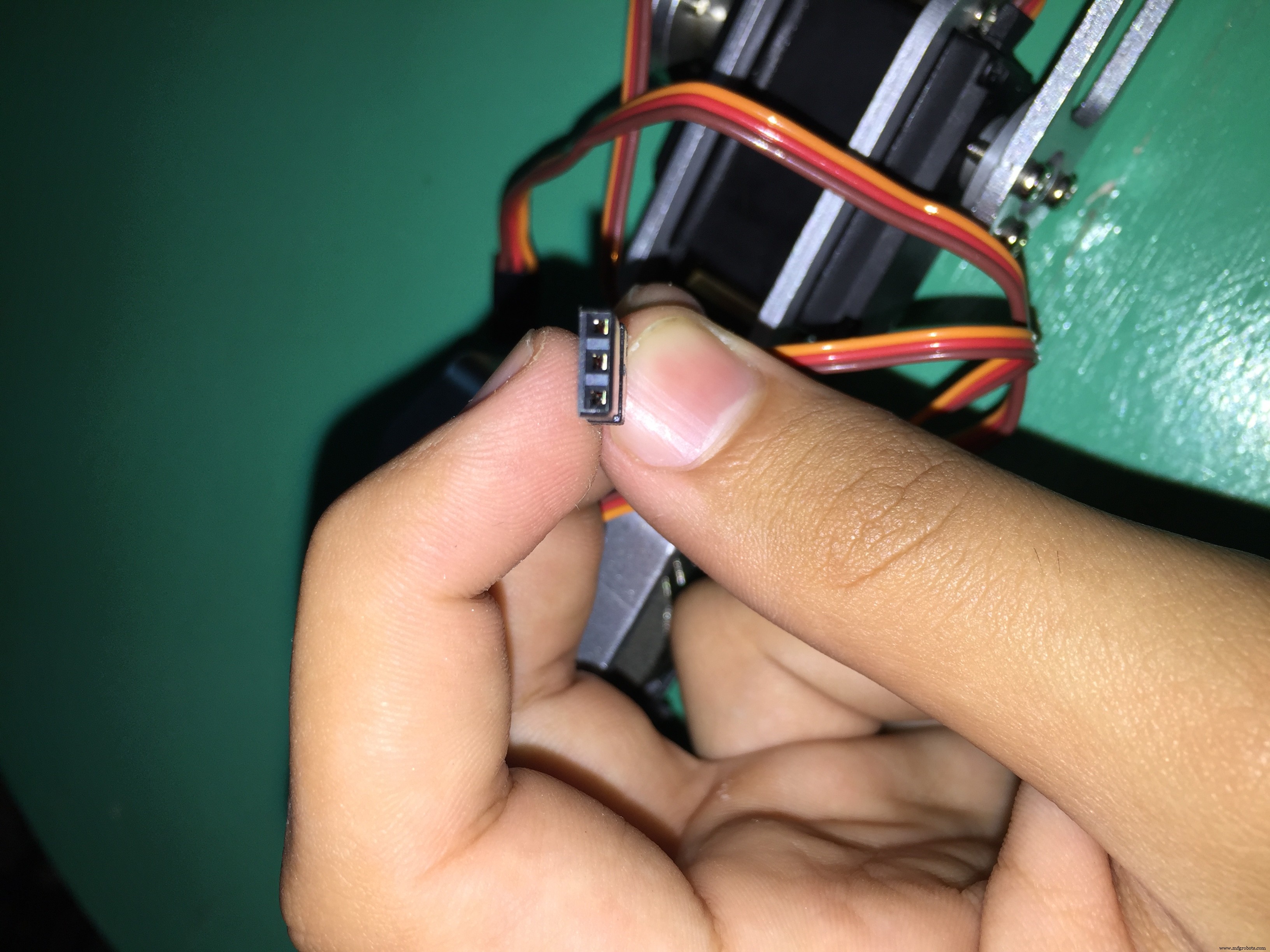
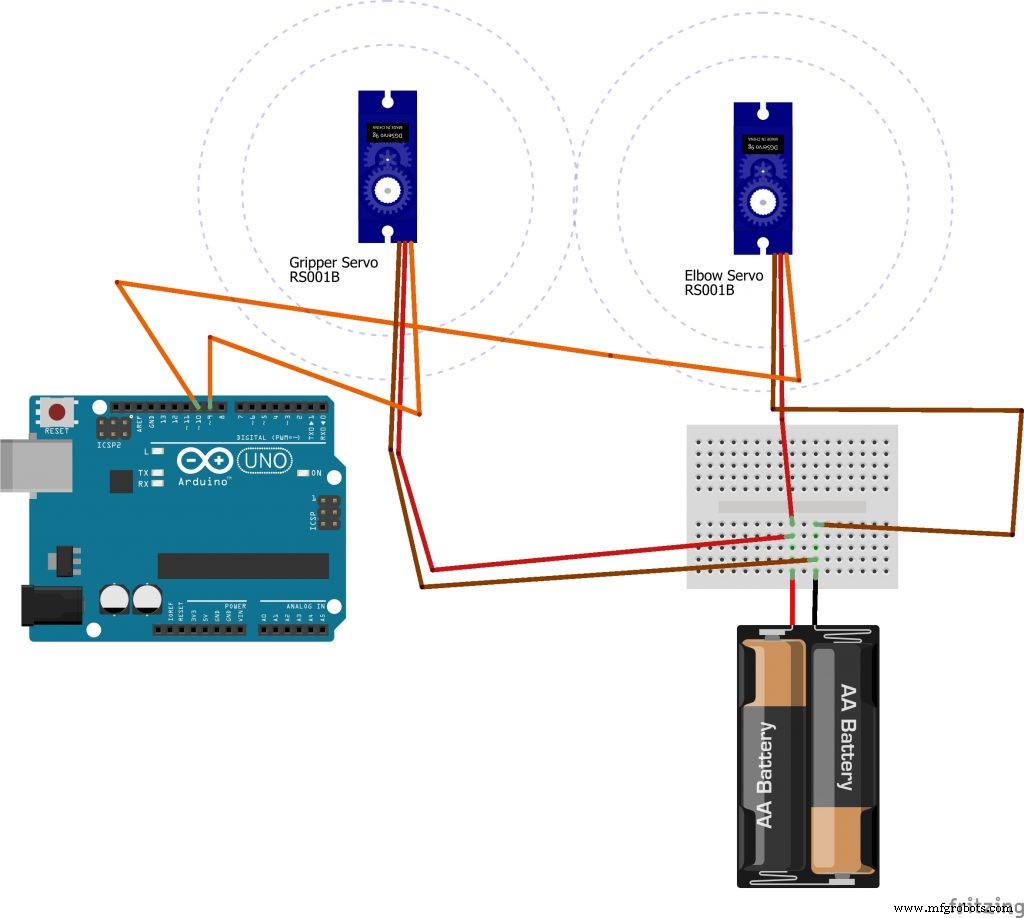
4) De servomotor heeft 3 draden:rood (positief), bruin (negatief), geel of oranje (signaal).
Opmerking:DOEN Sluit de positieve en negatieve van de servomotoren NIET aan op de 5V en GND van het Arduino-bord. Het Arduino-bord zal een vuur starten vanwege de hoge stroom die door de motoren wordt opgenomen; gebruik de externe batterij.
- De rode draad naar de positieve van de externe batterij
- De bruine draad naar de min van de externe batterij
- De oranje draad naar elke digitale (PWN) pin op de Arduino
OPMERKING:Vergeet niet om de GND van de batterij en de GND van de Arduino gemeenschappelijk te maken, maak het door elke GND met elkaar te verbinden.
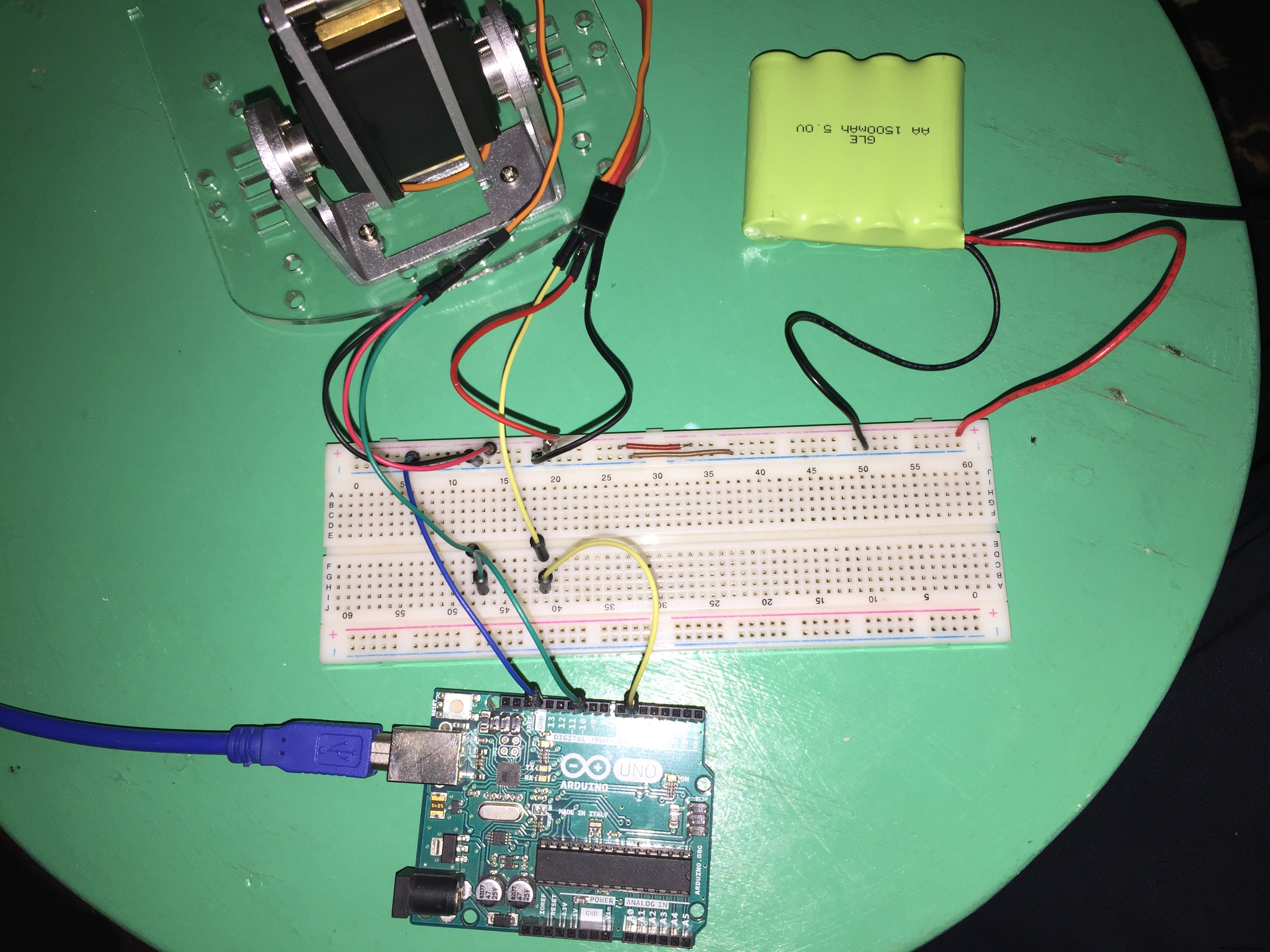
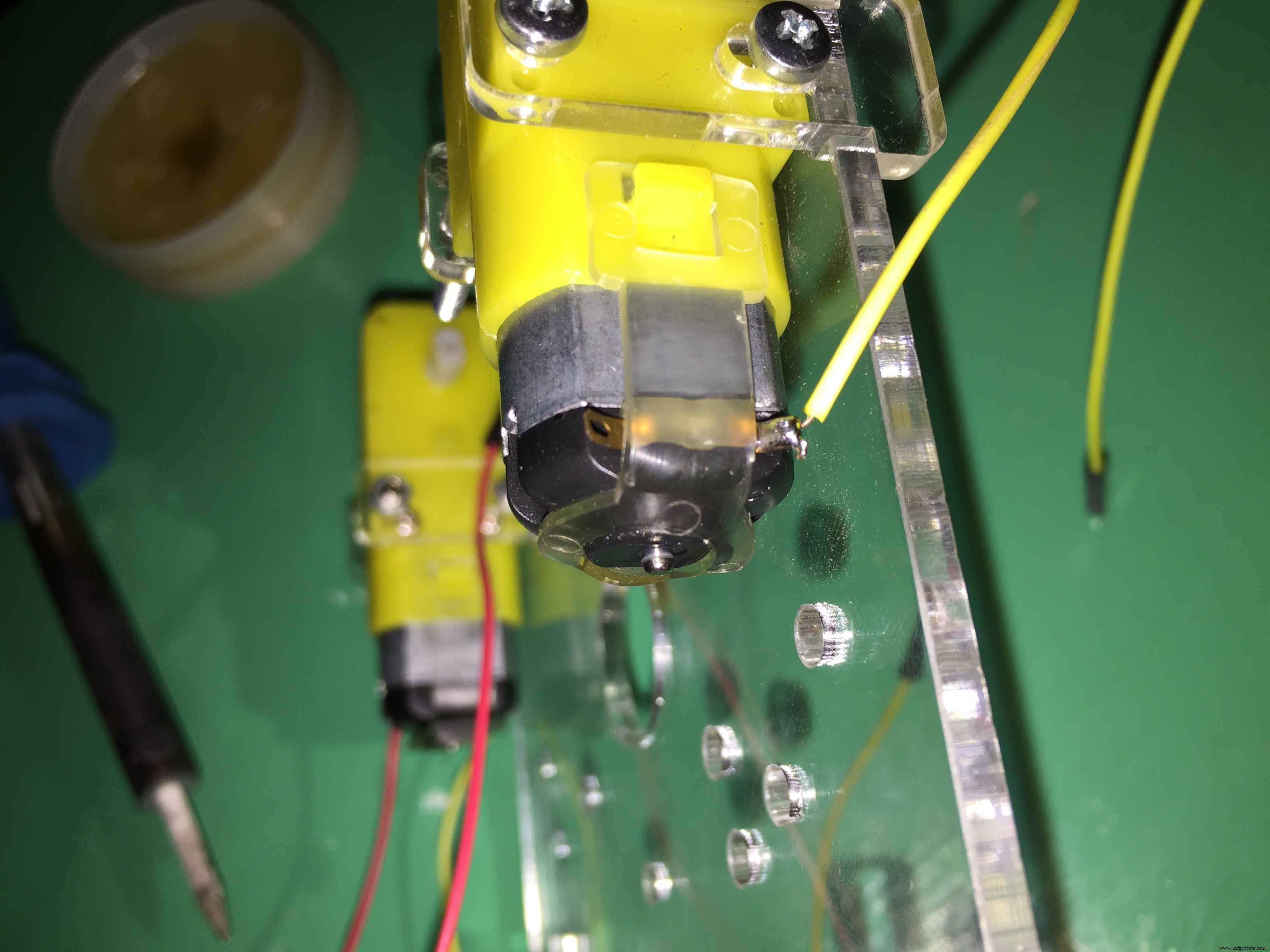
5) De gelijkstroommotoren
U moet enkele draden op de motorklemmen solderen om deze motoren te kunnen gebruiken.
De gelijkstroommotor heeft geen polariteit. Er is geen Positief en geen Negatief. Als u uw motoraansluitingen omkeert, verandert de bewegingsrichting van de motor.

Nadat u de motorklemmen hebt gesoldeerd, sluit u deze klemmen aan op de motorafscherming.

OPMERKING:binnen de de Arduino-code, ik gebruikte Motor 1 en Motor 2 - niet Motor 3 en Motor 4.
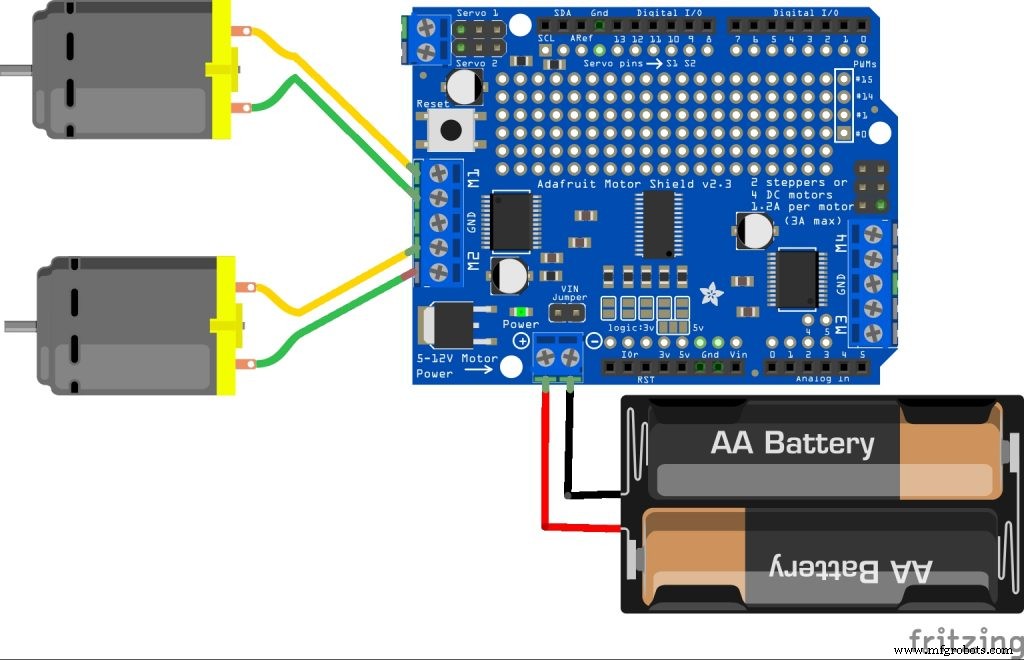
Het schema
Hoe de robotmotoren en de batterij te verbinden met de motordriver.
Hoe de Arm-servomotoren en de batterij te verbinden met het Arduino-bord.
Hoe de Bluetooth-module met het Arduino-bord te verbinden.
OPMERKING:ontkoppel (verwijder de RODE DRAAD +5-pins) de bluetooth-module terwijl u de code uploadt naar het Arduino-bord. Sluit het vervolgens opnieuw aan nadat het uploadproces is voltooid.
Code
- Kies en plaats Arduino-robotcode
Kies en plaats Arduino-robotcodeArduino
#include#include AF_DCMotor motorR(1);AF_DCMotor motorL(2);Servo elleboogServo;Servo gripperServo;int command;void setup() {gripperServo.attach(9); elleboogServo.attach(10);Serial.begin(9600);motorR.setSpeed(255);motorL.setSpeed(255);}void loop() {command =Serial.read(); /* ARM-code */if(commando>=1 &&commando <=180) //elleboogservo beweegt volgens de duimpositie op de mob-app tussen 0 -- 180 .{elleboogServo.write(command);}else if ( commando ==205) //Gripper verplaatsen naar hoek 0{ gripperServo.write(0);}else if (commando ==206) //Gripper verplaatsen naar hoek 90{ gripperServo.write(90); }else if (commando ==207) //gripper move to corner 180{ gripperServo.write(180);} /* CAR CODE */ else if (command ==200){ motorR.run(FORWARD); motorL.run(FORWARD);}else if(commando ==201){ motorR.run(FORWARD); motorL.run(ACHTERUIT); }else if(commando ==202){ motorR.run(RELEASE); motorL.run(RELEASE); }else if(commando ==203){ motorR.run(ACHTERUIT); motorL.run(VOORUIT); }else if(commando ==204){ motorR.run(ACHTERWAARTS); motorL.run(ACHTERUIT); }else if(commando ==0){ motorR.run(RELEASE); motorL.run(RELEASE); }}
Schema's
Deze app werkt alleen op Android-telefoons.U moet Bluetooth inschakelen voordat u deze app gebruikt
voordat u de Bluetooth-module uit de app kiest, koppelt u uw mobiel met de Bluetooth-module via de instellingen in uw telefoon ieee_aast_aswan_test1_xVVlPTtt8n.apk
Productieproces
- Raspberry Pi-robot bestuurd via Bluetooth
- Bouw uw internetgestuurde videostreamingrobot met Arduino en Raspberry Pi
- Wifi-gestuurde robot met Raspberry Pi
- 3D-printen van aangepaste brandstofinjectorgrijpers voor een pick-and-place-robot
- Kies en plaats robotfabrikanten in India
- Top 10 leveranciers van pick-and-place robots
- Robotarmonderdelen voor pick-and-place-automatisering
- Hoe pick-and-place-robots werken
- Kiezen en plaatsen – een perfect voorbeeld van robotgebruik met EasyWork
- Robots en batterijproductie:een positieve verbinding
- End-of-arm-tooling:pick-and-place-toepassingen met robots